基于LabVIEW的筒体内壁打磨设备定位控制系统开发应用
2017-12-28程欢袁潇潘惠泉吴国柱
程欢,袁潇,潘惠泉,吴国柱
(上海航天化工应用研究所,浙江 湖州 313000)
基于LabVIEW的筒体内壁打磨设备定位控制系统开发应用
程欢,袁潇,潘惠泉,吴国柱
(上海航天化工应用研究所,浙江 湖州 313000)
介绍了一种基于LabVIEW的筒体内壁打磨设备定位控制系统的开发应用过程,该系统基于LabVIEW 2010开发了控制系统的上位软件,利用研华公司提供的运动控制板卡及其提供的丰富的运动控制函数库来实现伺服电机的精确位置控制。经软件开发以及硬件的组装后,对该套控制系统进行了实验调试,取得了理想的试验效果。
LabVIEW;DLL;调用;定位控制
在工业生产中经常存在需对大长径比的筒体工件进行内壁表面处理的情况。为实现对筒体工件内壁的全覆盖打磨,打磨设备一般由打磨工具、大托板支撑机构、小托板行走机构以及筒体回转机构构成。上述四套机构均由伺服电机驱动,上位软件则需对四台伺服电机转速、转向、位置等参数进行实时动态控制,协调控制多台伺服电机联动运转,最终实现打磨工具行程轨迹既定。
1 LabVIEW与运动控制
LabVIEW是实验室虚拟仪器集成环境的简称,也是目前应用最广、功能最为全面的图形化软件开发环境。不同于传统的文本编程(V B、V C等),它采用了一种类似流程图形式的图形化编程形式,因此也被称为G语言,这种图形化的编程方式非常适合文本编程能力不足的电气工程师快速编制程序。
运动控制板卡是一种适用于运动控制场合的上位控制单元,一般以P C I接口形式嵌入P C主板。配合P C机实现更加灵活、柔性的运动控制平台。板卡通常采用D S P芯片作为控制核心,实现对步进、伺服电机的位置控制。
P C机和运动控制板卡组成主从式的控制模式,P C机负责人机界面的管理,控制信号收发以及电机位置信息的实时监控。控制板卡则负责各类指令(脉冲、方向、加减速等)的输入以及电机各类运动信号(位置、转速等)的采集。一般运动控制板卡厂家随之提供有运动函数库(DLL),用户只需要确定各运动函数的参数类型、长度就可以DLL形式实现运动函数库的调用,最终实现对伺服电机的精确控制。
2 控制系统的工作流程
打磨设备在对大长径比筒体工件进行内壁打磨过程中需要打磨工具、大拖板、小拖板以及筒体回转机构交互动作,四个部件协同运动才能保证内壁打磨过程满足工艺要求。具体工作流程包括以下部分。(1)设备上电自检;(2)各执行机构归零;(3)大托板快进到位;(4)小托板快进到加工位;(5)筒体、打磨工具回转;(6)打磨工具抬起开始打磨;(7)小托板工进到位;(8)打磨工具收回,打磨工具、筒体停转;(9)各执行机构归零,打磨结束。工作流程图如图1所示。

图1 筒体内壁打磨工作流程图
3 控制系统的总体硬件构成
由打磨工作流程可知,需要同时控制四台伺服电机协同工作,为此选取了研华公司生产的610 L工控机、P C I-1265运动控制板卡,依据打磨工序的工艺要求,选取了安川公司的伺服驱动器(S G D 7 S系列)和电机(S G M7 J系列)。
4 控制系统的开发
打磨设备控制系统的软件设计由用户UI界面和伺服电机定位控制程序两个部分组成,利用LabVIEW2 0 10建立数个V I子程序(分别实现速度位置设定、检测、故障记录、数据库写入等单项功能),在V I程序框图中通过条件结构框图将各子程序整合为打磨设备所需求的控制上位软件,而在搭建V I子程序的过程中,优化V I前面板即可获得上位控制软件所需的UI界面(图2所示)。

图2 打磨设备控制系统U I界面
安装研华提供的运动板卡驱动后,在l a b v i e w函数面板上用户控件选项中即可找到研华 c o m m o n m o t i o n插件,即为定位控制所需的动态函数库(DLL)。通过调用该函数库中各类运动函数,进而对伺服驱动器发送实时指令,实现对伺服电机的动态控制和运动状态监控。该系统几个重要的调用函数如表1所示。例如控制系统中就通过调用A c m_A x S e t A c t u a l P o s i t i o n()函数来获知了各伺服电机轴的实际当前位置信息,程序框图如图3所示。

表1 控制系统的主要调用函数明细
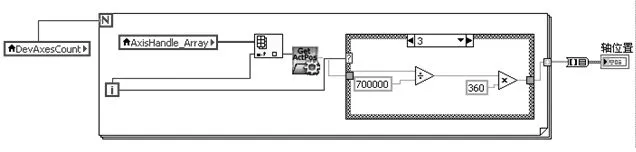
图3 伺服电机轴位置信息读取程序框图
在完成了打磨设备控制系统硬件搭建,软件开发后,通过调试实验,成功实现了对筒体内壁全覆盖打磨。控制系统硬件实物如图4所示。

图4 控制系统硬件实物图
5 结语
本文介绍了一种基于LabVIEW的筒体内壁打磨设备定位控制系统设计过程,详细阐述了LabVIEW与运动控制板卡组建定位控制平台的方法,完成了定位控制系统的设计与开发,并进行了实验调试,在调试试验中,该控制系统可以柔性实现不同长度的筒体内壁打磨,达到了设计要求。
[1]赵敏. 基于LabVIEW的运动控制系统的软件设计[D].太原:中北大学,2014.
[2]高瑞等. 基于LabVIEW的多轴运动控制系统的设计与开发[J].天津工业大学学报,2008(12):58-61.
TP273
:A
:1671-0711(2017)12(下)-0080-02