并联双排行星齿轮机构的研究
2017-12-28张国芬卢志强钱锋杰
张国芬,宋 震,卢志强,钱锋杰,杨 磊
(无锡职业技术学院汽车与交通工程学院,江苏 无锡214121)
并联双排行星齿轮机构的研究
张国芬,宋 震,卢志强,钱锋杰,杨 磊
(无锡职业技术学院汽车与交通工程学院,江苏 无锡214121)
并联双排行星齿轮机构是复杂变速器的基本单元,计算传动比要以整体来计算,最常见的三种并联双排行星齿轮机构是典型辛普森式CR-SS、改进型辛普森式CR-CR和拉维娜式。结合它们的结构,利用四节点杠杆法得到丰田A341E和通用4T65E(CR-CR)以及大众AG4的速度矢量图,图解其传动比并对它们进行多方面的对比,从而为今后自动变速器的自主设计提供参考。
杠杆法;行星齿轮机构;辛普森式行星齿轮机构;拉维娜式行星齿轮机构
0 引言
目前绝大部分轿车自动变速器是采用行星齿轮变速器,最多挡位是10AT,第二款10AT[1]是2016年通用雪佛兰全新科迈罗ZL1上使用的,它采用的是辛普森式和拉维娜式行星机构的组合,参考文献[2]对10AT的行星齿轮机构做了一些研究。多速行星齿轮变速器结构原理和传动比的计算复杂,用的方法很多,如传统的公式计算法[3]、矩阵法[4]、图论法[5]、杠杆法[6-7]也叫速度矢量法[8]或图解法[9]。本文采用杠杆法来分析典型辛普森式CR-SS和改进型辛普森式CR-CR以及拉维娜式的结构,利用四节点杠杆法图解其传动比并对它们进行多方面的对比,从而为今后自动变速器的自主设计提供参考。
1 单排行星齿轮机构速度矢量
1.1 单排行星齿轮机构的结构和特征方程
自动变速器行星齿轮机构都是由单排行星齿轮机构组合而成,图1是两种常见的单排行星齿轮机构简图,其中图A)是单排单级,图B)是单排双级,齿数比α=zR/zS>1,注意的是这里1和α是一种比例关系。
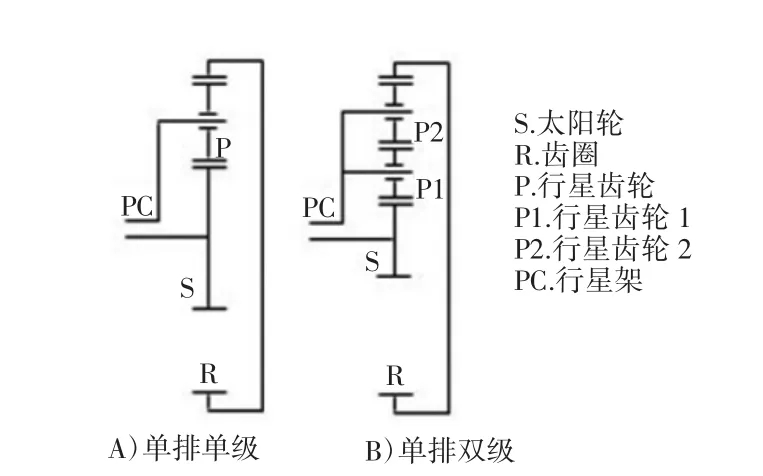
图1 两种常见单排行星齿轮机构简图
1.2 单排行星齿轮机构的速度矢量图
单排行星齿轮可以简化为三节点等效杠杆,图2是以PC节点作为等效杠杆支点(即行星架PC制动时)的速度矢量图,图中用速度矢量nS表示太阳轮S的速度和nR表示齿圈R的速度。
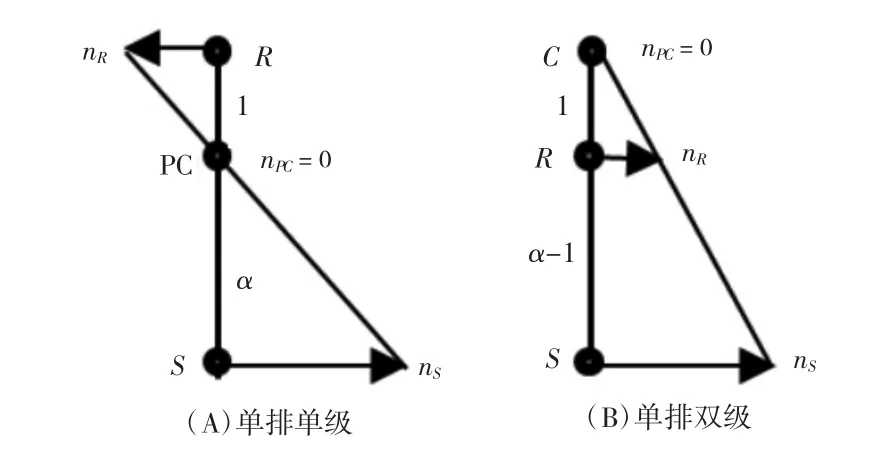
图2 两种常见单排行星齿轮机构矢量图
2 三种常见的并联双排行星齿轮机构
计算多排行星机构传动比时,串联关系可以由多个单排传动比连乘得到总传动比,而并联关系要把整体作为一个独立机构来计算传动比[10]。并联双排行星齿轮机构是复杂变速器的基本单元,最常见的三种是典型辛普森式CR-SS、改进型辛普森式CRCR和拉维娜式(可以看成CC-RR)。为了表达方便,本文统一用 Sj、Rj、PCj和 αj表示各构件的第 j排对应的各参数。
2.1 典型辛普森式行星齿轮机构CR-SS
辛普森行星齿轮机构是两个单排单级行星齿轮机构并联组合而成,复杂的辛普森行星齿轮机构都是在此基础上增加和组合其他行星排[11]。典型辛普森式CR-SS也称为共用太阳轮式,结构如图3的(A)所示。其特点是PC1和R2连为一体(CR),S1和S2连为一体(SS),构件连接如图(B),虚线表示连接关系。第一排增加K是为了保证两排的等效杠杆比例基准一致(即保证连接的两节点距离相等),可得K=(1+ α2)/α1;把(B)中连接的节点合在一起,得到图 3 的C)所示的四个节点的等效杠杆图。
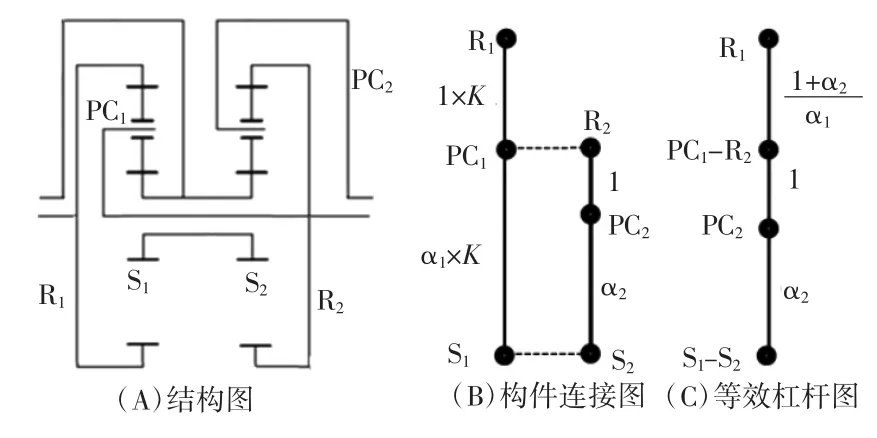
图3 典型辛普森式CR-SS杠杆图
2.2 改进型辛普森式行星齿轮机构CR-CR
改进型辛普森式CR-CR也称为独立太阳轮式,结构如图4 A)所示,特点是前后两排中都是独立的太阳轮 S1和 S2,PC1与 R2连为一体(CR),R1与 PC2连为一体(RC),改进型辛普森式实质是CR-RC,习惯上写成CR-CR,它是 CR-SS的改进形式,构件连接如(B)所示,等效杠杆如(C)所示。
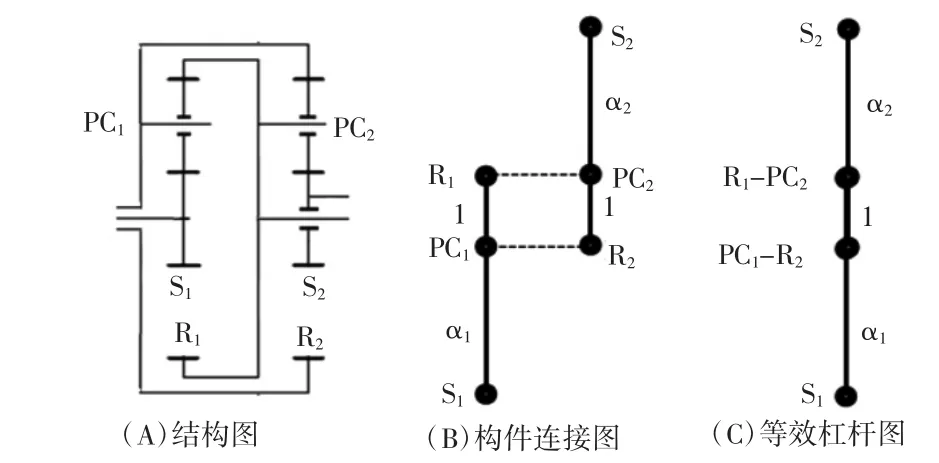
图4 改进型辛普森式CR-CR结构及杠杆图
2.3 拉维娜式行星齿轮机构
拉维娜式结构如图5的(A)所示,特点是前后两排共用R和PC,前排是单排单级(对应大太阳轮S1),后排是单排双级(对应小太阳轮S2),拉维娜式可以看成CC-RR,构件连接如(B)所示,等效杠杆如(C)所示。

图5 拉维娜式结构及杠杆图
3 应用实例
3.1 典型辛普森式CR-SS 4挡变速器
丰田A341E是日本皇冠3.0轿车的自动变速器,它采用典型辛普森式CR-SS串联一个超速排,其结构示意图如图6所示。超速排是单排单级,用下标j=0 来表示该排,α0=ZR0/ZS0=79/33=2.394;CR-SS的前后两排对应的同名元件完全一样,所以α1=α2=ZR2/ZS2=79/42=1.881[12].
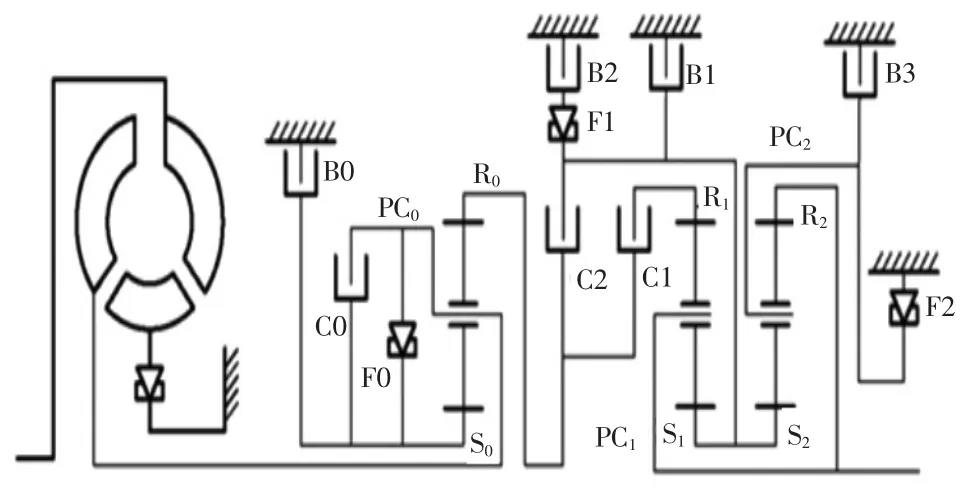
图6 丰田A341E自动变速器结构示意图
丰田A341E各挡换挡元件(离合器、制动器和单向离合器)如表1所示。为了表达方便,把图3的CR-SS等效杠杆放到放坐标系中,横坐标表示速度,in表示输入,一般输入速度横坐标X=1,唯一例外的是超速挡输入速度横坐标X>1;out线表示输出线(过输出元件对应的节点且平行于X轴),第j挡比例线与out线的交点横坐标值是该挡的输出速度nj(j=1,2,…);结合图3和图6可得速度矢量如图7,再由相似三角形,各挡传动比图解如下:

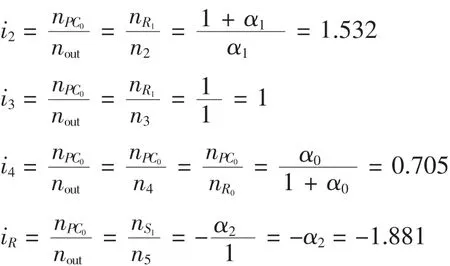
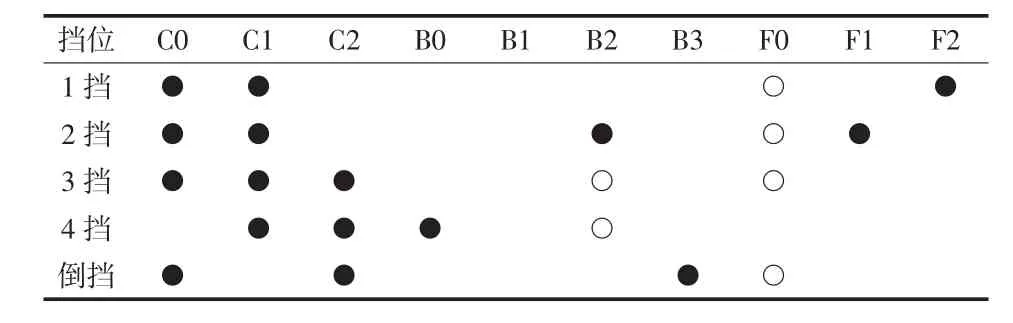
表1 丰田A341E自动变速器各挡换挡元件
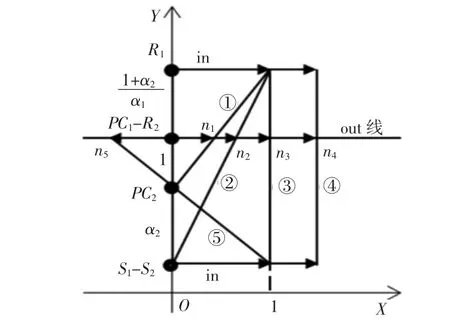
图7 丰田A341E速度矢量图
3.2 改进型辛普森式CR-CR 4挡变速器
别克君威4T65E等自动变速器都采用改进型辛普森式CR-CR结构[13-14]。图8是通用4T65E自动变速器结构示意图,α1=ZR1/ZS1=62/26=2.385;α2=ZR2/ZS2=74/42=1.762[15].
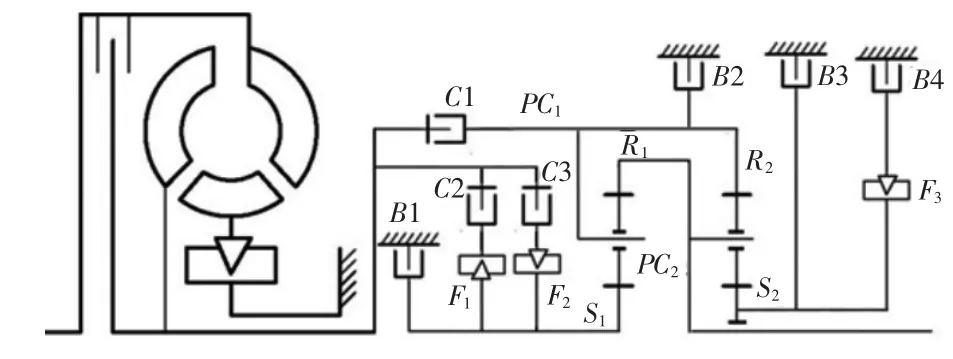
图8 通用4T65E自动变速器结构示意图
通用4T65E各挡换挡元件如表2所示,结合图4和图8可得速度矢量如图9,由相似三角形,各挡传动比图解如下:

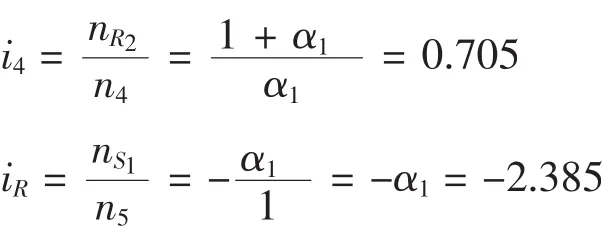
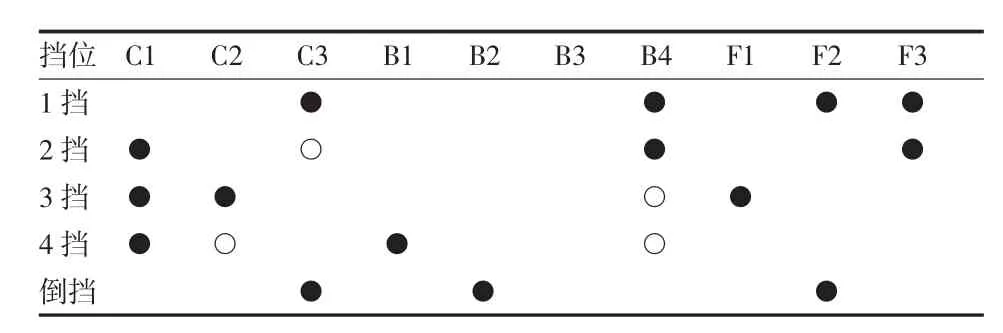
表2 通用4T65E自动变速器各挡换挡元件

图9 通用4T65E速度矢量图
3.3 拉维娜式4挡变速器
大众AG4(01M/01N)等自动变速器都采用拉维娜式行星齿轮机构。图10是大众AG4自动变速器结构示意图,α1=ZR/ZS1=57/24=2.375,α2=ZR/ZS2=57/21=2.714[12].
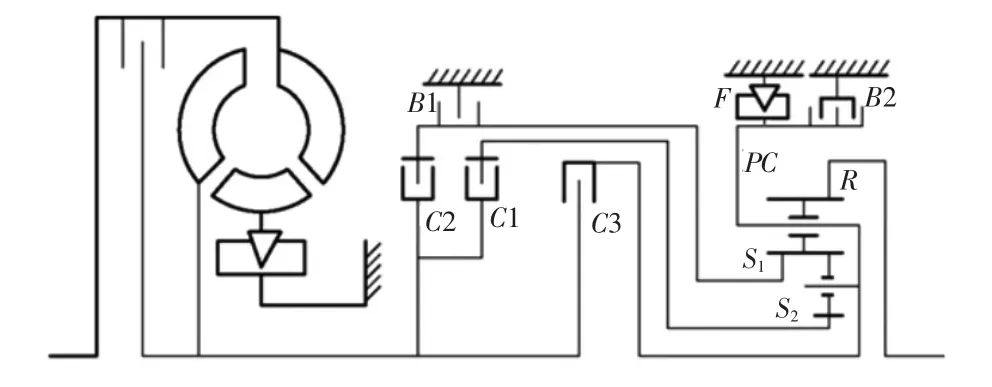
图10 大众AG4自动变速器结构示意图
大众AG4自动变速器各挡换挡元件如表3所示,结合图5和图10可得速度矢量图如图11,各挡传动比图解如下:
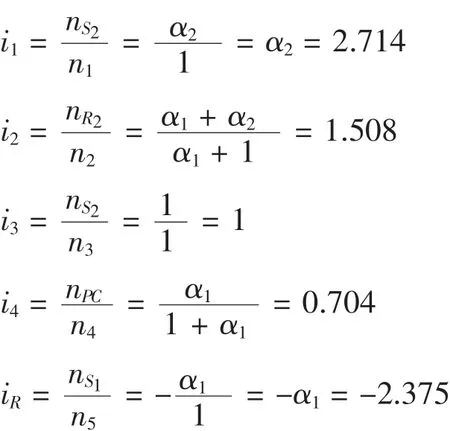
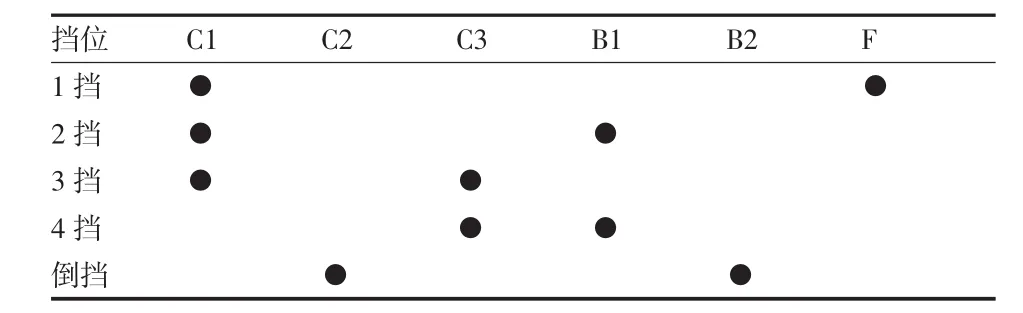
表3 大众AG4自动变速器各挡换挡元件

图11 大众AG4速度矢量图
3.4 A341E和4T65E以及AG4对比
表4是包含评价参数的A341E和4T65E以及AG4对比,从表中可以看到:(1)改进型辛普森式CR-CR和拉维娜式传动比非常接近,二者1挡和倒挡的传动比数值都比典型辛普森式大,说明它们1挡的动力性和倒挡的安全性相对好一些;(2)拉维娜式的工作元件数和换档元件数最少,说明拉维娜式的成本和故障率方面也有优势;(3)从尺寸和工艺参数方面,拉维娜式α2=2.714几乎完美,T=0.875也是三种机构中最好的。

表4 A341E和4T65E以及AG4对比
4 结论
(1)并联双排行星齿轮机构可以实现3-4个前进挡和1个倒挡。典型辛普森式CR-SS一般不用它的超速挡,改进型辛普森式CR-CR和拉维娜式用4个前进挡和1个倒挡。
(2)改进型辛普森式CR-CR和拉维娜式等效杠杆各元件相对位置一样,速度矢量图仅1挡和2挡不同,这两种设计方案存在很多相似性。
(3)三种常见的并联双排行星齿轮机构中,拉维娜式多方面具有优势。
[1]王一鸣.CHEVROLET CAMARO ZL1究极蜂王[J].世界汽车,2016(6):26.
[2]李明圣,兰 莹,李 勇.10速自动变速器传动机构研究[J].机械传动,2015,39(4):164-167.
[3]汤厚义.自动变速器(A340E)一档起步分析[J].中国校外教育旬刊,2015(29):120.
[4]贾振华,吴心平,李友才.MATLAB在自动变速传动分析中的应用[J].汽车零部件,2016(2):54-56.
[5]薛会玲,刘 更,杨小辉.行星齿轮变速机构运动学分析[J].机械与电子,2016,34(9):3-6.
[6]李志伟,甘 伟,高奇峰.基于杠杆法的4T65E自动变速器传动研究[J].大众科技,2013(11):94-98.
[7]许爱芬,贾巨民,刘 宁.基于改进杠杆法的行星变速机构传动方案研究[J].军事交通学院学报,2014,16(7):91-95.
[8]侯国强,尤明福,王梦瑶.基于瞬心-速度矢量法的辛普森式行星齿轮变速器传动比分析[J].现代机械,2014(4):16-24.
[9]张玉书,岳东鹏.基于速度图解法优化分析拉维娜式行星齿轮变速器的传动方案[J].机械传动,2014,38(11):165-167.
[10]陈伟来.浅谈行星齿轮变速机构工作原理的学习[J].科技视界,2013(10):56-57.
[11]高迎春,单 鹏,孙明飞.自动变速器行星齿轮机构规律分析[J].辽宁工业大学学报(自然科学版),2013,33(1):56-59.
[12]高少华.关于典型自动变速器传动比的计算[J].机电技术,2015(4):11-14.
[13]赵海宾.汽车自动变速器典型齿轮变速机构分析[J].山东工业技术,2016(1):265-265.
[14]范 毅.整体矢量法分析行星齿轮自动变速器传动特性[J].农业装备与车辆工程,2015,53(12):46-48.
[15]尤 扬,尤明福,侯国强.基于图解法的4T65E自动变速器传动分析[J].现代机械,2015(1):32.
Research on Two-row Parallel Planetary Gear Mechanism Based on Lever Method
ZHANG Guo-fen,SONG Zhen,LU Zhi-qiang,QIAN Feng-jie,YANG Lei
(School of Automobile and Transportation,Wuxi Institute of Technology,Wuxi Jiangsu 214121,China)
As the basic unit of complicated transmission system,two-row parallel planetary gear mechanism is considered as one part in transmission ratio computation.The three mostly used parallel planetary automatic transmissions are simpson CR-SS,Simpson CR-CR and Ravigneaux mechanism.Using 4-node lever method,the velocity vector diagram of TOYOTA A341E,GM 4T65E and Volkswagen AG4 is produced based on their structures,their transmission ratios are illustrated and compared in many aspects,providing references for independent transmission design in the future.
lever method;planetary gear mechanism;simpson mechanism;ravigneaux mechanism
U463.212
A
1672-545X(2017)10-0105-04
2017-07-04
博士启动基金资助项目(编号:30593117034)
张国芬(1975-),女,湖北蕲春人,博士,讲师,主要研究方向为机械传动技术;宋 震(1976-),男,江苏无锡人,硕士,讲师,主要研究方向为汽车维修技术;卢志强(1982-),男,江苏无锡人,本科,实验员,主要研究方向为汽车维修技术;钱锋杰(1996-),男,江苏南通人,专科,主要研究方向为汽车维修技术;杨 磊(1997-)男,江苏宿迁人,专科,主要研究方向为汽车维修技术。
