基于PLC的四轴搬运机械手实验装置的研究
2017-12-28范芳蕾余宏涛张克义章国庆
范芳蕾,余宏涛,张克义,章国庆
(东华理工大学江西省新能源工艺及装备工程技术研究中心,江西 南昌330013)
基于PLC的四轴搬运机械手实验装置的研究
范芳蕾,余宏涛,张克义,章国庆
(东华理工大学江西省新能源工艺及装备工程技术研究中心,江西 南昌330013)
基于Dobot机械臂设计原理确定结构尺寸,结合PLC实现控制系统设计,完成四轴搬运机械手实验装置的研制。该装置控制系统采用大工计控MAC1610运动控制器,控制四个步进电机,完成搬运功能。同时采用触摸屏作为人机交互设备,对各关节进行调试,根据记录的各关节的位置,完成示教再现功能。机械手结构紧凑,控制系统程序设计简洁、界面友好。
四轴搬运机械手;PLC;人机交互;控制系统;示教再现
随着工业自动化程度的提高,机械手被广泛应用于机械制造、冶金、汽车、电子、轻工等行业[1]。作为最常见的机械手,搬运机械手可以在高危险、高污染、高温度、高辐射等环境中代替人手完成零件的抓取、搬运、放置等工作,将工人从繁重的体力劳动中解放出来[2]。本文研制开发一小型四轴搬运机械手实验装置,采用PLC控制、组态监控,为搬运机械手的运动提供了一个仿真的工业环境,通过软件控制代替硬接线控制,以软件编程完成搬运机械手运动过程的动作修改和控制,在一定程度上提高了搬运机械手系统的灵活性[3]。该系统具有成本低、易于集成、操作方便等优点。
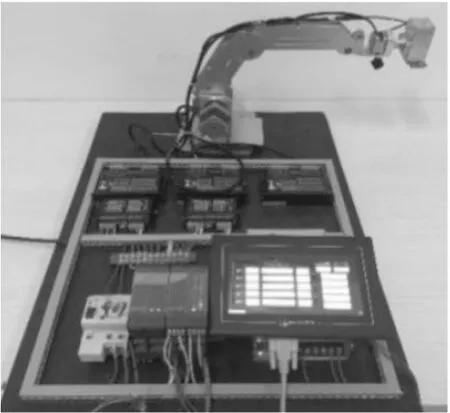
图1 四轴搬运机械手结构图
1 搬运机械手结构设计
机械手要实现按照给定程序或要求,部分替代人的手工劳动,自动完成物料搬运,结构上四自由度基本上能满足工业需求。本文依据三自由度Dobot机器臂作为机械手的本体结构,根据实验要求确定结构尺寸,并在其末端执行器支架上增加腕部旋转关节,完成本体加工制作,使之达到四自由度的要求。Dobot机器臂的末端执行器支架始终保持与水平面平行,特别适合搬运作业[4]。小型四轴搬运机械手及其PLC控制系统如图1所示。为简化系统结构,提高搬运机械手的通用性,并综合分析小件的尺寸和重量要求,选用Parker ESG1-SS-2815型电动夹持器作为末端执行器。
2 控制系统硬件设计
2.1 控制系统设计要求
(1)具备手动示教和自动运行两种工作模式。在手动示教模式下,可分别控制各关节运动,并记录控制点位信息。在自动运行模式下,按照手动示教记录的点位信息,机械手各关节依次运动到指定点位,完成预定轨迹。在完成搬运工作后,按预定轨迹返程。
(2)在搬运和复位过程中,可预设运动速度,提高工作效率。
(3)控制系统具备工件到位自动检测功能。
2.2 控制系统的硬件设计
(1)控制系统硬件构成
控制系统采用上位机(触摸屏)和下位机(PLC)的两级控制结构,上位机完成主要控制参数设定、功能按钮控制等功能,力求人机交互界面简介直观、操作灵活。PLC作为下位机控制系统核心,接收上位机的控制信息,实现对各执行元器件的控制。机械手的控制系统主要有PLC控制器、位置传感器(光电开关、接近开关)、触摸屏、开关电源、步进电机及其驱动器组成。
(2)PLC和触摸屏的选取
分析搬运机械手控制系统的组成,确定系统所需的I/O端口的数量和类型等要求,同时按照I/O端口20%~30%的备用原则[5],选用大工计控MAC1610运动主控器作为主控制器。该控制器拥有23路输入,包含8路高速计数,最大1 MHz,16路高速脉冲输出,最大500 kHz.MAC1610除了支持基本的逻辑控制指令外,可以实现8个实轴+4个虚轴的高精度定位控制和4个轴组的多轴同步运动控制[6]。
触摸屏作为人机交互界面,可以设置机械手运动参数、运行方式,并完成手动示教。本文选用威伦TK6070ik触摸屏开发人机交互界面。触摸屏与PLC之间采用RS485通讯,波特率11 5200 Hz.
3 控制程序设计
控制系统程序主要包括示教程序和自动运行程序。示教程序通过上位机控制机械手点动到达控制点位,通过一系列的控制点位实现机械手按照一定的轨迹运动。示教完成后,自动运行程序先回零,然后按照控制点位的顺序运动,完成指定的搬运动作,再反向复位,如此循环往复。控制程序的流程图如图2所示,程序设计主要包括触摸屏人机界面设计和PLC程序设计两部分。

图2 控制系统程序流程图
3.1 触摸屏程序设计
利用台湾威纶科技公司开发的新一代人机界面软件EasyBuilder8000完成人机界面的设计,该平台适用于MT8000和MT6000系列所有型号的产品[7]。根据控制系统的要求,设计的人机交互界面如图3所示。触摸屏通过Modbus RTU协议与PLC进行通讯,人机交互界面中各控制元件及其Modbus地址如表1所列。
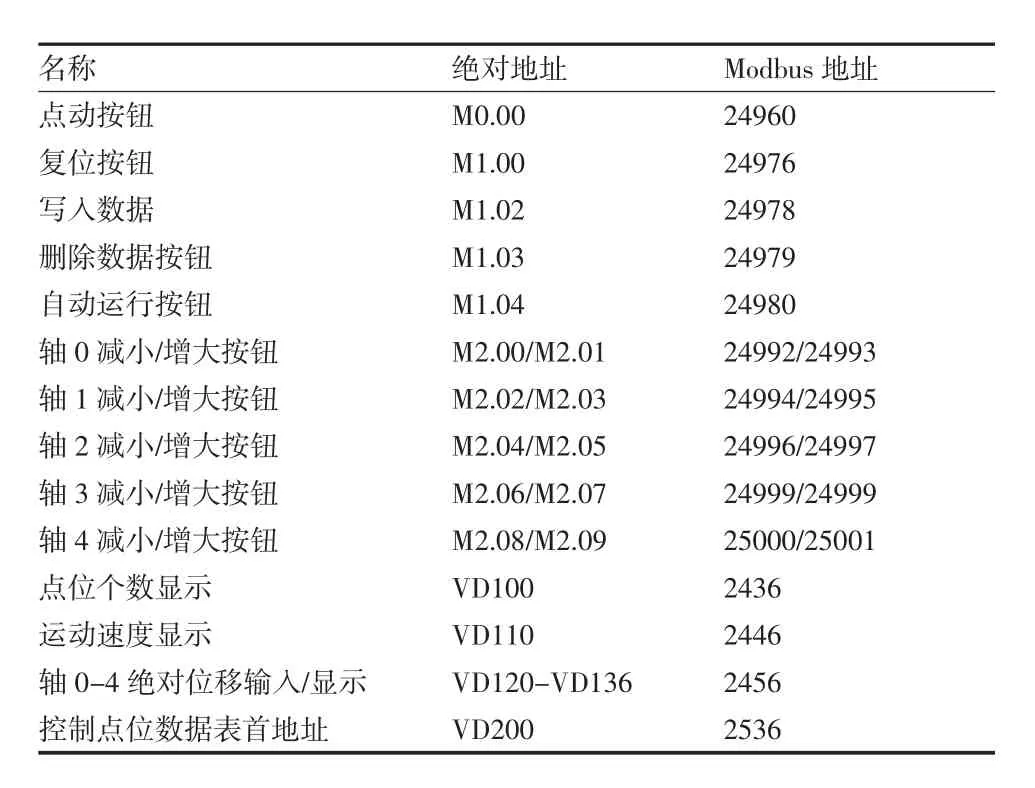
表1 控制元件Modbus地址
在图3所示的人机交互界面上可以完成机械手控制系统的所有操作。轴0~轴4的绝对位移通过绝对位移输入框直接输入,轴的运动方向由输入数值的正负控制。同时在输入框两侧增加了微调按钮,方便对输入量进行调整。位移输入完成设定运动速度,单击“点动”按钮可以观察机械手的运动过程。执行点动操作后选择搬运过程中的控制点位,其对应的各轴位移可以通过“写入数据”命令添加到控制点位数据表中,“点位个数”显示当前控制点位数目。对于有误的控制点位数据可以通过“删除数据”命令予以剔除。执行“复位”操作,机械手以给定速度回零。在示教完成后点击“自动运行”按钮机械手自动回零后按照控制点位数据表中的数据进入循环往复运行,执行搬运动作。
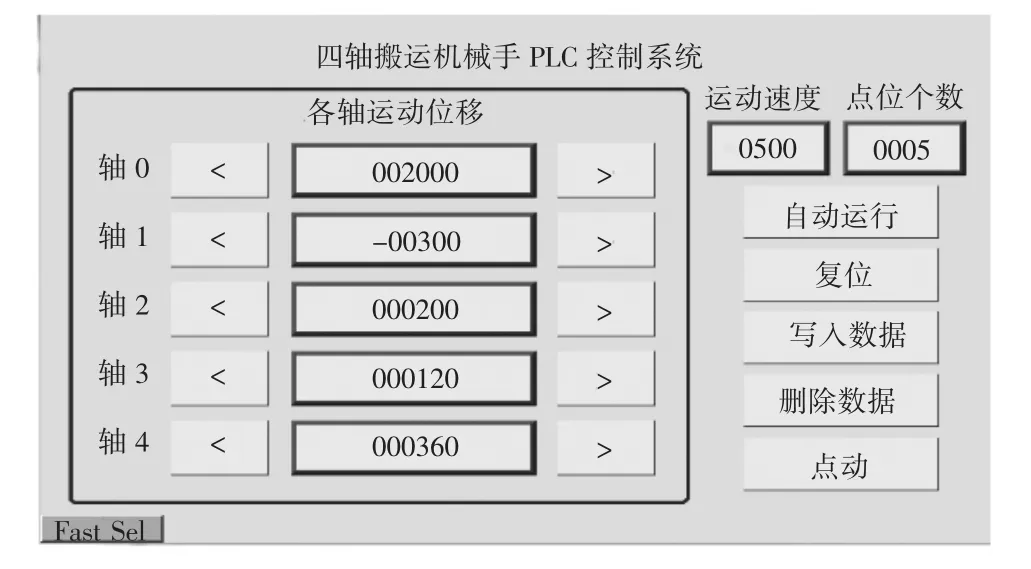
图3 人机交互界面
3.2 PLC程序设计
MAC1610支持符合PLCopen标准的单轴、多轴、轴组三大类运动控制指令,每个运动控制功能模块都以IEC 61131语言中的功能块语言存在[8]。这种由功能块语言定义的运动控制模块,较传统的PLC编程语言弱化了对编程语言的依赖性,使得编程人员能够把工作重心放在应用开发或解决问题上,提高了用户运动控制程序开发和维护的效率。此外,功能块语言采用图形化编程,程序设计简单,具有较高的直观性、易操作性以及可读性[9]。PLCopen绝对定位指令如图4所示。

图4 绝对定位指令
该指令通过M0.0(点动按钮)使能,控制轴0运动当前位置运动到VD120指定的绝对位置,运动速度通过VD110控制。指令执行完成后,M0.01置位。
为了实现示教再现功能,程序为每个轴分配了绝对位移变量(VD120-VD136),并建立了两个数据指针(VD104、VD108)和一个控制点位数据表(首地址为VD200)。指针VD104用来在执行“写入数据”或“删除数据”命令时对控制点位数据表进行写入或删除操作。指针VD108用于在自动运行过程中查表,读取控制点位数据表中的各轴数据信息,并赋值给相应轴的绝对位移变量地址,如图5所示。
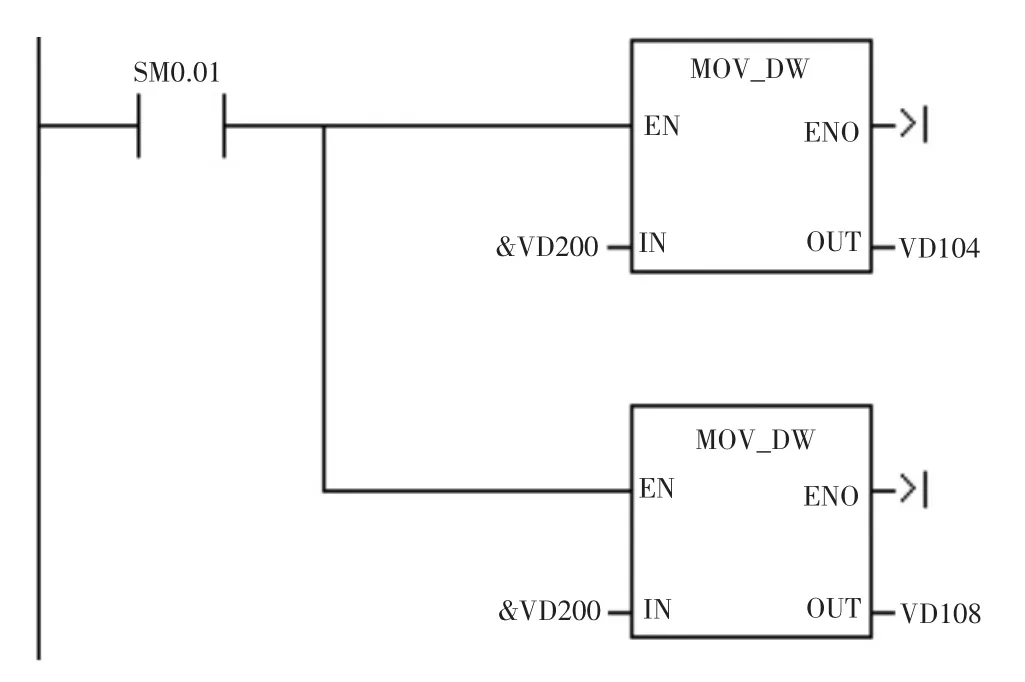
图5 建立数据指针
执行“自动运行”命令,指针VD108读取控制点位数据表各轴的绝对位移信息,控制各轴按照示教轨迹运动。通过实验,设计的PLC控制系统能够较好的跟踪示教点位轨迹,完成再现功能。
3.3 实验效果验证
利用开发的机械手进行尼龙棒料2工位180°往复搬运实验。机械手回零后,通过触摸屏手动调整到起点位置,然后手动示教往复搬运动作,选取6个控制点位并存储各关节的绝对地址。点击“自动运行”按钮,机械手按照示教点位往复运动。实验过程中,通过上位机编程软件监控机械手的运动过程。实验表明,开发的机械手具有较好的重复性,基本上满足小型物料的自动搬运功能。
4 结语
采用MAC1610运动控制器实现小型搬运机械手实验装置控制系统设计。上位机采用触摸屏实现对机械手各轴的参数输入和点动控制,通过建立控制点位数据表,实现了机械手的示教再现功能。该系统操作简单、成本低、易于维护和集成,可应用于高校自动化实验装置开发和集成,同时对开发基于PLC控制的工业搬运机械手有一定的实践指导意义。
[1]代 婷,黄 超,王成志.双臂吊装机械手机构设计[J].机械设计与制造,2015(3):159-162.
[2]周 鹏.搬运机械手的设计与实现[J].自动化与仪表,2017,32(6):65-67.
[3]吕栋腾.基于PLC控制的搬运机械手设计[J].制造装备技术,2014(10):168-169,172.
[4]赵智勇,王冬青.Dobot机器人运动学分析和建模仿真[J].青岛大学学报(工程技术版),2017,32(1):52-57.
[5]李海芹,姜印平,翟 阳,等.基于 S7-200 SMART PLC的智能药品包装机的控制设计[J].制造业自动化,2013,35(10):47-50.
[6]大工计控.MAC系列可编程控制器使用手册[Z].
[7]威纶EB8000软件使用手册[Z].台湾:台湾威纶公司,2011.[8]Eelco V D W.PLCopen[J].IEEE Industrial Electronics Mag azine,2006,3(4):25.
[9]王 翰,宋 宝,唐小琦.基于PLCopen的运动控制系统的设计[J].新型工业化,2013,3(8):68-73.
Research of Four axial Carrying Manipulator’s Experimental Device base on PLC Control System
FAN Fang-lei,YU Hong-tao,ZHANG Ke-yi,ZHANG Guo-qing
(Jiangxi Province Engineering Research Center of New Energy Technology and Equipment,East China Unive rsity of Technology,Nanchang Jiangxi 330013,China)
Based on Dobot arm design principle,main structure dimension is determined and then a four-axis carrying manipulator with PLC control system is developed.MAC1610 motion controller produced by DCCE is selected to control four stepper motors and then fulfill carrying function.Simultaneously,every joint can be debugged respectively by using human-machine interface,and according to the absolute address which is record in advance,the teaching and playback function is realized.The structure of the carrying manipulator is compact,and control system is concise and its interface is friendly.
four-axis carrying manipulator;PLC;human-machine interface;control system;teaching and playback
TP241.2
A
1672-545X(2017)10-0080-04
2017-07-08
江西省新能源工艺及装备工程技术研究中心开放基金(JXNE2014-04);江西省教育厅科学技术研究项目(GJJ160581)
范芳蕾(1984-),女,江西抚州人,工程师,硕士,研究方向:机械系统故障诊断与测试,机械设计。