基于simulink的永磁同步电机的SVPWM控制和电流滞环控制
2017-12-28周海燕边晓伟张译之马春生
周海燕,边晓伟,张译之,马春生,王 宽
(长安大学工程机械学院,陕西 西安 710064)
基于simulink的永磁同步电机的SVPWM控制和电流滞环控制
周海燕,边晓伟,张译之,马春生,王 宽
(长安大学工程机械学院,陕西 西安 710064)
通过MATLAB/simulink/SimpowerSystems工具箱,结合永磁电机的数学模型建立了永磁同步电机的SVPWM控制和电流滞环控制两种系统模型,通过仿真结果表明,这两种控制系统有良好的性能,为现实中的控制系统设计提供一种理论基础。
永磁同步电机;矢量控制;SVPWM;电流滞环;仿真
随着纯电动汽车的逐步推广,永磁同步电动机凭借其效率较高,功率密度大,低损耗,运行可靠等优点,在纯电动机械应用十分广泛。在对电机控制[1]性能的要求逐渐提高的背景下,建立合适有效的控制仿真模型一直是电机控制领域的研究热点[2]。
1 永磁同步电机的数学模型
永磁同步电机和普通的励磁同步电机一样都是定子三相对称绕组。一般通过惯例来规定电机各个参数物理量的相关正方向。本文以三相星形的通电模式来分析永磁同步电机数学模型及其电磁转矩等特性[3],做以下设定:
(1)磁路不是饱和的,电机的电感不受电流影响;
(2)忽略涡流和磁滞损耗并且电机不受齿槽、换相以及电枢反应的影响;
(3)定子的三相绕组是完全对称的,且永久磁钢的磁场顺着气隙的四周呈正弦分布;
(4)在定子的内表面电枢绕组连续分布且均匀;
(5)驱动、续流二极管均为理想元件;
(6)在气隙中转子磁链呈正弦分布[4]。
由此电机电压平衡方程:
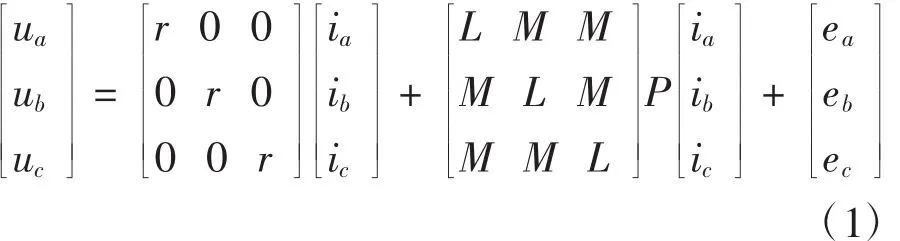
又因为三相绕组为三相星形连接,而且没有中线:
其中:ua,ub,uc为定子相绕组 a,b,c 三相电压;r为电机定子电阻;L 为电机每相绕组的自感;ia,ib,ic为三相绕组相电流;ea,eb,ec为 a,b,c 定子相绕组电动势;M为电机每两相绕组之间的互感;p=d/dt微分;
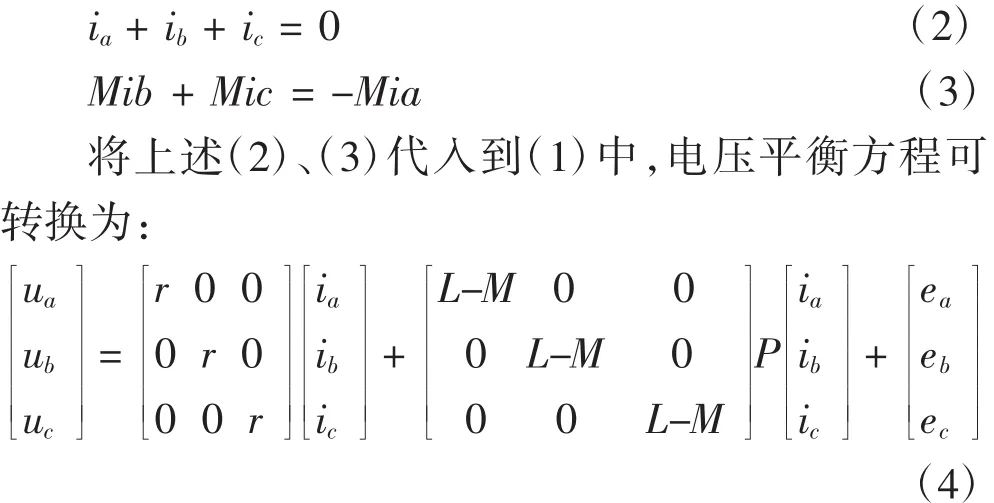
定子绕组产生的电磁转矩的表达式[5]:
式中,Te为电机电磁转矩;TL为电机负载转矩;B为电机阻尼系数;J为电机转动惯量;np为电机极对数[6]。
2 电机控制模型的建立
根据上节建立的永磁同步电机的数学模型,通过MATLAB建立永磁同步电机的SVPWM矢量控制模型以及电流滞环控制模型。这两个都是电流内环反馈、转速外环反馈控制的双闭环控制系统。首先,输入一个合理的参考转速,然后根据传感器检测到的电机转速,两者对比可以得到一个转速偏差,再利用电机转矩和转速之间对应的关系,通过对电机速度进行PI控制,然后通过计算得到定子电流ia,ib,相对应的定子参考电流id*和iq*.接下来由相电流检测电路提取出电机的两相电流ia,ib,然后将此电流通过Clark以及park变换,将静止坐标上的ia,ib电流转换到d,q旋转坐标系中,得到对应d,q旋转坐标系中的id和iq电流,然后与上述的id*和iq*相比较(规定id*=0),将结果通过PI控制处理后输出对应控制量。接下来将控制量进行park逆变换,然后传递给三相逆变器以得到控制定子绕组的实际电流。此过程从速度环(外环)得到定子电流的参考值,从电流环(内环)得到实际的电机控制信号,两者结合构建一个完整的电流、速度矢量双闭环控制系统[7]。
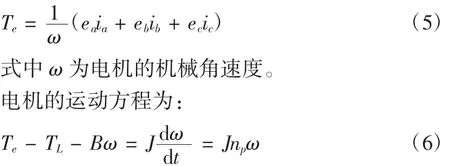
2.1 永磁同步电机SVPWM矢量控制模型
SVPWM矢量控制方式是根据三相逆变器的六个开关管,六个开关管可以产生八个基本的空间矢量,所需的参考电压空间矢量可以由任相邻的两个空间矢量合成,由此,可以通过控制逆变器的开关,根据开关不同状态产生的实际磁通去逐渐逼近电机所需的圆形磁场,从而实现电机的控制,SVPWM矢量控制模型如图1所示。

图1 SVPWM矢量控制模型
2.2 永磁同步电机的电流滞环控制
永磁同步电机的滞环电流控制模块,定子三相参考电流 ia*,ib*,ic* 和实际电流 ia,ib,ic作为输入信号,那么输出的信号就是所需的逆变器的控制信号。在信号输入滞环比较器的时候,ia,ib,ic 图2 PMSM的滞环电流控制 为判断两个控制模型的准确性,对两个模型进行仿真实验,采用的永磁同步电机相关参数为:额定转速ωr=100 rad/s,极对数np=2,定子电阻r=2.875 Ω,定子dq轴电感Ld=Lq=0.85 mH,永磁体磁链Ψf=0.185 wb,转动惯量J=0.0021 kg·m2. 系统开始启动时为空载,在t=0.5 s时突加负载3 N·m,得到系统转速ωr,转矩Te以及三相定子电流 ia,ib,ic的仿真曲线,见图 3 所示。 图3 控制结果图 由上面仿真波形可以得到,在输入参考转速为1 000 rad/s时,两种控制系统响应迅速平稳;电机在启动时,转矩平稳恒定,没有产生较大的转矩,也没有产生电流冲击,在负载突变后,能迅速恢复平稳,仿真结果较为理想。两个控制系统对比来看,SVPWM控制系统在突载产生后,系统响应更为迅速,恢复平稳性也较好。 [1]洪熙闻,王钦若.永磁同步电机电压空间矢量控制仿真研究[J].上海大中型机,2010(4):43-47. [2]PILLAY PKRISHNAN R.Modeling,simulation and analysis of permanent-magnet motor drives,PartⅠ :The permanentmagnet syn-chronous motor drive[J].IEEE Trans on Industry Applications,1989,25(2):265-273. [3]陈 威,蒋 宇,谢国秋.永磁同步电机矢量控制系统设计与仿真[J].电气开关,2009,47(5):54-60. [4]黄慧敏.永磁同步电机控制发放与研究[D].武汉:武汉理工大学,2017. [5]林 海,李 宏,林 洋,等.永磁同步电机矢量控制系统仿真与建模研究[J].微特电机,2006(8):43-45. [6]崔总泽.三相电压SVPWM整流器控制策略研究[D].锦州:渤海大学,2012. [7]孙业树,周新云,李正明.空间矢量PWM的SIMULINK仿真[J].农机化研究,2003,2(2):105-106. [8]赵江锋.基于储能保护的永磁直驱风电系统LVRT仿真研[D].成都:西南交通大学,2012. SVPWM Control and Current Hysteresis Control of Permanent Magnet Synchronous Motor Based on Simulink ZHOU Hai-yan,BIAN Xiao-wei,ZHANG Yi-zhi,MA Chun-sheng,WANG Kuan In this paper,SVPWM control and current hysteresis control of permanent magnet synchronous motor are established by MATLAB/simulink/SimpowerSystems toolbox and mathematical model of permanent magnet motor.The simulation results show that the two control systems have good performance,for the actual control system design provides a relatively reliable theoretical basis. permanent magnet synchronous motor;vector control;SVPWM;current hysteresis;simulation TM341 A 1672-545X(2017)10-0045-03 2017-07-13 周海燕(1992-),男,河南人,硕士研究生,研究方向:电机,电源能量控制管理。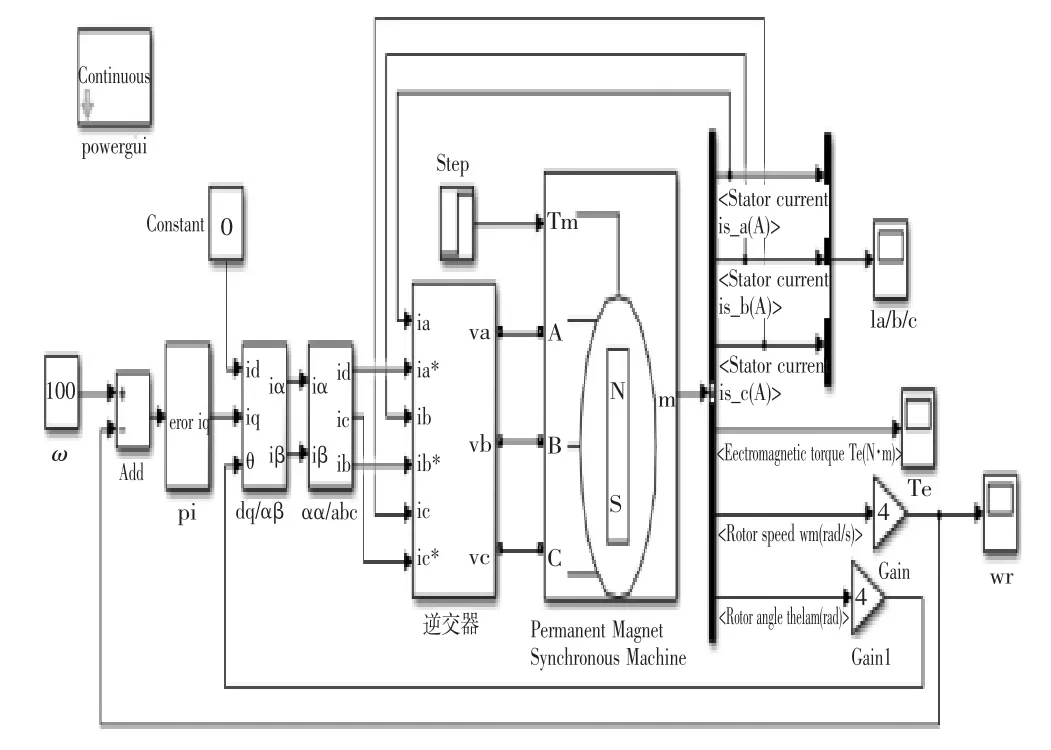
3 仿真结果
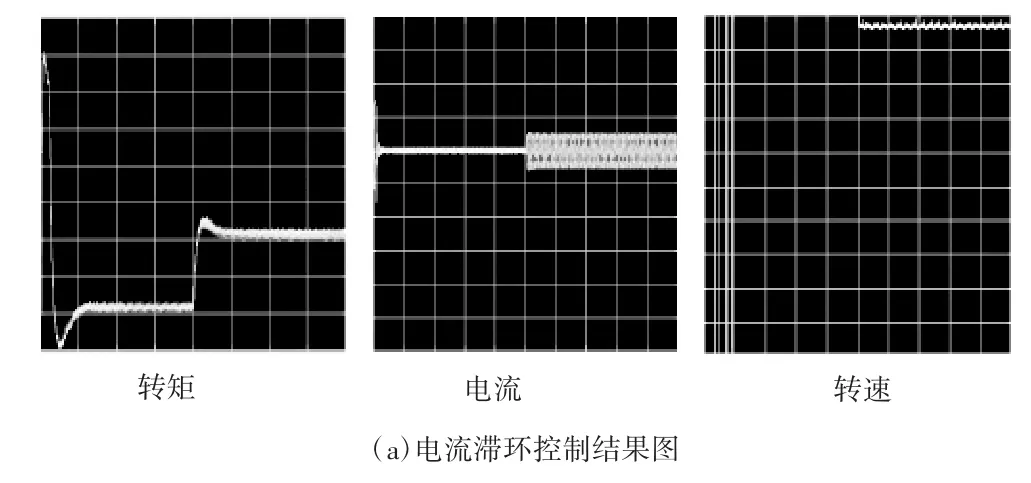
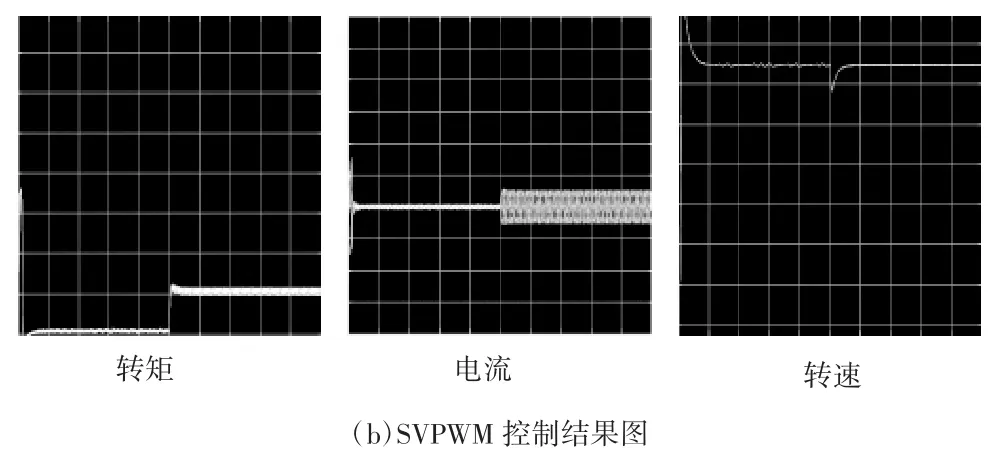
4 结果分析
(College of Engineering Mechanics,Chang’an University,Xi’an Shaanxi 710064,China)
