基于蜂窝网络的无人机通信研究
2017-12-27徐珉胡南
徐珉,胡南
基于蜂窝网络的无人机通信研究
徐珉,胡南
(中国移动通信集团公司研究院,北京 100053)
为满足无人机日益增长和多样化的业务需求,优化移动蜂窝网络以适应无人机通信的新应用场景,分析了基于移动蜂窝网络的无人机通信基本应用场景和数据类型,研究了4G网络支持无人机通信的关键技术问题,提出了干扰检测与抑制、移动性管理和无人机终端识别等解决方案,并展望了网络切片等5G网络新技术支持无人机通信的应用前景。
无人机 移动蜂窝网络 干扰抑制 移动性管理 网络切片
1 研究背景
UAV(Unmanned Aerial Vehicle,无人机)是一种具有自主动力的非载人飞行器,可通过人工操控或自动驾驶执行多种任务[1]。无人机起源于军事领域,用于侦察、监视、测绘、空中打击等军事用途。近年来,随着无人机相关的技术进步和成本降低,其开始广泛应用于民事领域,包括货运、航拍、交通巡线、灾难搜救、环境监测、农林生产、工程建设、通信中继[2]等。无人机集成飞控、通信、发射回收、电源等功能系统,其中通信系统用于保障无人机与地面站(控制和应用数据终端等)之间的控制指令(飞行速度、高度、姿态、路线等)和应用数据(实时图像、监测报告、执行状态等)传输的实时性及可靠性,是保证无人机准确有效完成任务的核心系统之一。
随着无人机应用领域和应用场景的迅速扩展,无人机通信需要满足日益多样化的业务需求,ITU(International Telecommunication Union,国际电信联盟)于2017年1月已针对民用无人机通信服务需求立项(SG16 Q21/16 F.CUAV)[3]。地面站交互的任务相关数据,如物流信息、环境数据、航拍或交通实时图像等。根据任务需求不同,应用数据在速率、时延和可靠性等方面的要求也有所不同,比如航拍高清图像要求较高数据速率,而交通实时图像则同时要求较低时延和一定的数据速率,等等。

相应地,移动蜂窝网络需要满足无人机通信数据业务的差异性需求,作为参考,表1为基于4G(LTE)网络的无人机通信研究相关参数(3GPP RAN2工作组暂定)[6],表2为4G(LTE)网络QoS(Quality of Service,服务质量)体系中可能用于C&C数据的QCI(QoS Class Identifier,QoS分级指示)配置。可以看出,为支持无人机通信的基本需求,4G(LTE)网络需将无人机控制数据作为时延敏感型业务进行承载,而应用数据的处理与地面UE基本一致。
目前,4G(LTE)网络支持的无人机通信控制和应用数据均已被纳入3GPP RAN2工作组的SI(Study Item,研究项)范围,而无人机通信的业务特性被列为FFS(For Further Study,待进一步研究)问题[6]。

表1 基于4G(LTE)网络的无人机通信研究相关参数(3GPP RAN2工作组暂定)

表2 4G(LTE)网络QoS体系中可能用于C&C数据的QCI配置
3 基于4G网络的无人机通信关键技术问题
由于多数无人机的飞行高度在天线之上,无人机UE的无线通信环境与地面UE存在差异,进而带来干扰增多、移动性管理复杂化、身份验证识别难等技术问题。移动蜂窝网络除了需要满足无人机通信的数据类型和场景需求之外,还需解决无线通信环境差异带来的新问题。
比如,当无人机UE飞行高度低于或接近天线高度时,其无线传播特性类似于地面UE。而当无人机UE在高于天线高度飞行时,由于视线传播的概率增大,其上行信号会被更多站点接收到,同时本身亦会探测到来自更多站点的下行信号,具体如图3所示:

图3 无人机UE与地面UE的传播特性差异
由此带来的技术问题包括但不限于:
(1)无人机UE的上行信号会对更多的地面UE造成上行干扰,同时本身亦会收到更多的下行干扰,需要进行干扰检测和采取干扰抑制策略;
(2)由于视线传播和干扰增多,无人机UE所处空域的小区覆盖不像地面小区覆盖一样较为规则,特别是最优小区会频繁改变(见图4)[7],因此在4G(LTE)网络中,针对地面UE设计的连接态(RRC_CONNECTED)小区切换、空闲态(RRC_IDLE)小区重选等移动性管理规则并不完全适用;
(3)为满足禁飞管控等应用需求以及针对无人机UE设计干扰抑制和移动性管理策略,需要对已获飞行授权的无人机UE进行识别(区别于地面UE,特别是甄别无人机携带的未经飞行授权的地面UE)。

图4 无人机UE高度提升造成的最优小区不规则特性示意图
3.1 干扰检测与抑制
下行干扰检测方面,在现有4G(LTE)标准中,基站(eNB)通过向UE发送测量配置信息(包括测量对象和测量报告配置),UE可以探测当前服务小区和相邻小区的下行参考信号,测量报告可周期性触发或基于事件触发(同系统的A1-A5事件)。由于视线传播,飞行高度较高的无人机UE可能收到来自更多eNB的下行参考信号,相应地会触发更多基于事件的测量报告。比如,更多的邻区干扰一方面会导致服务小区RSRQ(Reference Signal Receiving Quality,参考信号接收质量)下降而触发事件A2,另一方面会提高事件A4(相邻小区信号质量高于门限)的触发概率,这会导致更加频繁的测量报告和切换,从而加速消耗无人机UE电量。因此,需要进行考虑更多强相邻小区情形的测量报告机制优化。
上行干扰检测方面,在现有4G(LTE)标准中并未规定具体方案。参照上行ICIC(Inter Cell Interference Coordination,小区间干扰协调)的设计思路,即服务小区可通过X2接口发送HII(High Interference Indicator,强干扰指示)给相邻小区用于资源分配以规避干扰,可针对无人机UE设计小区间的调度信息交换;另一方面,即使上下行信道存在差异,下行RSRP(Reference Signal Receiving Power,参考信号接收功率)仍可在一定程度上反映上行信号强度,3GPP RAN2工作组业已同意对利用RSRP进行上行干扰检测的方案开展研究[6];此外,3GPP RAN1工作组还针对设计上行参考信号展开讨论[8]。
干扰抑制方面,已有的ICIC、eICIC(enhanced ICIC)、FeICIC(Further enhanced ICIC)等技术仍可适用于无人机UE。需要注意的是,对于无人机UE,一方面,在干扰协调过程中会涉及更多的相邻小区;另一方面,处于小区中心的无人机UE可能同样需要干扰协调(地面UE只有在小区边缘时才需要),相应需要做出针对性的改进。
3.2 移动性管理
由于无人机UE的飞行高度和速度范围与地面UE存在较大差异,现有的移动性管理规则并不完全适用。对于连接态小区切换,无人机UE飞行高度和速度的增加相应带来测量次数、测量报告规模、切换次数、切换失准(过早、过迟或切换至错误小区)、链路失效和链路重建的增多,进而影响无人机UE性能,增加无人机UE能耗,加重无线和核心网侧的信令负担等。
为应对上述问题,一方面可针对无人机UE的无线环境特性,改进切换判决条件,如同时基于RSRP和RSRQ,甚至SINR(Signal to Interference plus Noise Ratio,信噪比)等,或是优化移动性控制参数,如TTT(Time To Trigger,触发时间)、CIO(Cell Ind Offset,小区个体偏移)等;另一方面可针对无人机UE优化与切换相关的其他流程和方案,包括前文所述的测量报告机制改进、干扰协调与抑制以及波束赋形等。
与连接态小区切换类似,无人机UE的空闲态小区重选面临类似问题。比如,在现有4G(LTE)标准中,空闲态的UE在服务小区的RSRP或RSRQ低于门限值时才会触发邻区测量[9]。而由于多路视线传播带来的空中小区不规则化,空闲态无人机UE的邻区测量可能过迟触发,导致其无法保证驻留在信号质量最好的小区。解决方案包括:设置无人机UE专用偏置因子、扩展触发门限范围、设计新的触发条件(如基于RSRQ的变化)、增加非基于事件的测量规则(如周期测量)等[10],这些方案均存在重选精度与节能之间的折衷,参数值的合理选择或新规则设计都需要进一步的测试来验证支撑。
对于路径点、路线和飞行状态等信息可预置或可获取的无人机UE,这些信息也可用于移动性管理策略设计[11],包括预切换等。
3.3 无人机UE识别

4 基于5G网络的无人机通信展望

4.1 网络切片
网络切片是由一组网络功能和相关所需资源(包括核心网和接入网)组成的完整逻辑网络,用于为UE提供特定的网络能力和网络特性[12]。通过建立专用的逻辑网络(作为一种服务),5G网络切片有望满足网络业务的差异化应用和垂直行业的多样化需求。
5G网络切片引入了tenant的概念,用于指代一类网络切片所服务的组织、机构、应用或用户群体。如图5所示,5G网络中的无人机UE可根据自身属性、应用行业或业务需求组成一类或多类tenant,通过定制化的网络切片来识别身份、数据需求甚至干扰抑制和移动性管理等策略。
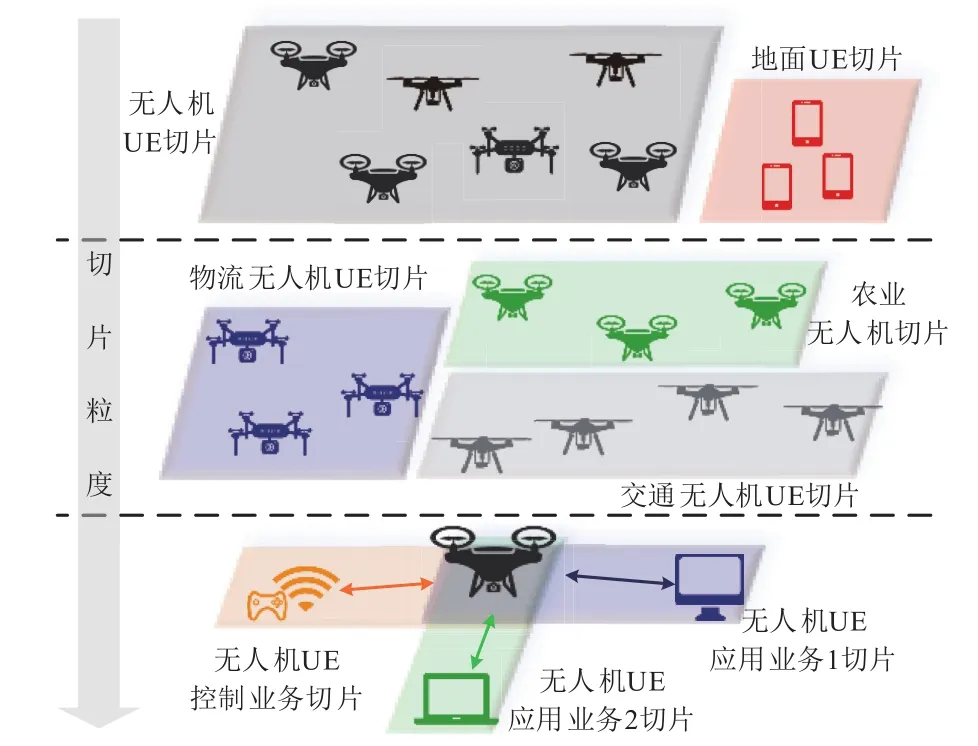
图5 支持无人机通信的5G网络切片粒度示意图
比如,在5G网络中,UE与基站和核心网之间通过交互NSSAI(Network Slice Selection Assistance Information,网络切片选择辅助信息)来选择AMF(Access and Mobility Management Function,接入和移动性管理功能)实体以及网络切片实体。通过为无人机UE分配(或准许其使用)专用的NSSAI,可以在逻辑上实现无人机UE与地面UE的业务和无线策略的区分;通过细化无人机专用NSSAI中的S-NSSAI(Single NSSAI,用于标识具体的切片),可区分不同应用行业的无人机UE,以及使用不同切片分别保障控制数据和多类应用数据业务,等等。
4.2 QoS保障
在4G(LTE)的承载机制中,QoS的控制功能主要在核心网完成,接入网仅根据核心网下发的QoS参数,对无线侧资源进行调度。
为适应业务的多样化需求,5G网络引入QoS流的概念,并采用更为灵活的两级QoS映射:核心网负责IP流到QoS流的映射,接入网负责QoS流到DRB(Data Radio Bearer,数据无线承载)的映射[13]。通过两级映射,5G的QoS机制可以在同一切片下实现更细粒度(QoS流)的QoS保障及更灵活的业务承载方式(QoS流与DRB间映射关系的动态配置)等。另一方面,5G核心网和接入网均引入了reflective QoS机制,允许UE根据下行映射(IP流到QoS流的映射和QoS流到DRB的映射)快速配置对应的上行映射。这些新特性一方面可以保证无人机通信不同数据类型得到相应的最佳承载,另一方面也缩短了无线链路自适应调整的时间,保障无人机通信业务的连续性和有效性。5QI机制(5G QoS Indicator,类似于4G的CQI机制)也定义了更多可用的QoS配置[12],如5QI=69可提供60 ms和10-6误包率用于无人机通信控制数据传输等。
此外,5G网络的其他新特性和新技术可以进一步支持无人机通信。比如,引入inactive态后,处于inactive态的无人机可达到idle态类似的节电效果,且又可由无线网侧更快寻呼到;基于beam的移动性管理可保障无人机在通信时使用优选的beam,降低其产生和受到的干扰,等等。
5 结束语
移动蜂窝网络具有覆盖范围广、系统容量大、支持业务类型全面、抗干扰性强等优点,在支持无人机通信方面具有广泛的应用前景。因此,本文结合4G/5G移动蜂窝网络技术现状和标准化进程,针对基于蜂窝网络的无人机通信开展研究,通过分析无人机通信数据类型、应用场景和关键技术问题,论述了基于4G网络的无人机通信解决方案和基于5G网络的无人机通信技术前景。为进一步发挥移动蜂窝网络的覆盖和性能优势,使能多样化的无人机应用,未来可继续研究针对无人机通信的3D波束成形[14]与空域分层覆盖、飞行路径规划[15]、基于基站或小区的电子围栏等。
[1] Afonso L, Souto N, Sebastiao P, et al. Cellular for the skies: Exploiting mobile network infrastructure for low altitude air-to-ground communications[J]. IEEE Aerospace and Electronic Systems Magazine, 2016,31(8): 4-11.
[2] Sharma V, Bennis M, Kumar R. UAV-assisted heterogeneous networks for capacity enhancement[J].IEEE Communications Letters, 2016,20(6): 1207-1210.
[3] ITU. ITU-T work programme: Requirements for communication service of civilian unmanned aerial vehicle[EB/OL]. [2017-01-25]. https://www.itu.int/md/T17-SG16-170116-TD-WP1-0050.
[4] 3GPP RP-171409. Report of 3GPP TSG RAN meeting#75[S]. 2017.
[5] DJI technology. DJI Products: Drones[EB/OL]. [2017-03-31]. http://www.dji.com/products/drones.
[6] 3GPP. Report of TSG-RAN WG2 Meeting #98[S]. 2017.
[7] Ericsson. 3GPP RAN2#98 proposal: R2-1705427 Potential enhancements for HO[S]. 2017.
[8] 3GPP. Report of TSG-RAN WG1 Meeting #89[S]. 2017.
[9] 3GPP TS 36.304 V14.2.0. Evolved Universal Terrestrial Radio Access (E-UTRA); User Equipment (UE)procedures in idle mode[S]. 2017.
[10] CMCC. 3GPP RAN2#98 proposal: R2-1705781 Intrafrequency Measurement Triggering of the Aerial UEs for Cell Reselection[R]. 2017.
[11] Huawei, HiSilicon. 3GPP RAN2#98 proposal: R2-1704997 Mobility enhancement for Drones[R]. 2017.
[12] 3GPP TS 23.501 V1.0.0. System Architecture for the 5G System; Stage 2[S]. 2017.
[13] 3GPP TR 38.804 V14.0.0. Study on New Radio Access Technology; Radio Interface Protocol Aspects (Release 14)[S]. 2017.
[14] 袁征,薛连莉,武毅. 中继通信无人机天线自动跟踪平台设计[J]. 现代雷达, 2017,39(1): 60-64.
[15] 李子杰,刘湘伟,廖文龙,等. 掩护突防中雷达干扰无人机压制干扰航路优选[J]. 现代雷达, 2015,37(2): 79-82.★
Research on UAV Communications Based on Mobile Cellular Networks
XU Min, HU Nan
(China Mobile Research Institute, Beijing 100053, China)
To satisfy the ever-increasing and versatile service requirements of Unmanned Aerial Vehicles (UAVs), mobile cellular networks were optimized to adapt to the new application scenarios of UAV communications. Basic application scenarios and data types of UAV communications based on mobile cellular networks were analyzed.Key technical problems of 4G networks to support UAV communications were addressed. Solutions to interference detection and suppression, mobility management and UAV terminal identifi cation were proposed. In addition, new techniques in the 5G network such as network slicing were discussed to support the UAV communications.
UAV mobile cellular network interference suppression mobility management network slicing
10.3969/j.issn.1006-1010.2017.22.006
TN929.5
A
1006-1010(2017)22-0023-06
徐珉,胡南. 基于蜂窝网络的无人机通信研究[J]. 移动通信, 2017,41(22): 23-28.
2017-06-25
袁婷 yuanting@mbcom.cn
徐珉:工程师,工学博士毕业于北京邮电大学,现任职于中国移动通信集团公司研究院,无线网络与协议工程师,主要从事4G/5G移动通信网络技术研究、高层协议设计和标准化工作。


胡南:高级工程师,工学博士毕业于北京邮电大学,现任职于中国移动通信集团公司研究院,副主任研究员,主要从事4G/5G移动通信网络技术研究、高层协议设计和标准化工作。
