Cylinder pressure based combustion phase optimization and control in spark-ignited engines
2017-12-26YahuiZHANGTielongSHEN
Yahui ZHANG,Tielong SHEN
Department of Engineering and Applied Sciences,Sophia University,Chiyoda-ku Tokyo,102-8554,Japan
Cylinder pressure based combustion phase optimization and control in spark-ignited engines
Yahui ZHANG†,Tielong SHEN
Department of Engineering and Applied Sciences,Sophia University,Chiyoda-ku Tokyo,102-8554,Japan
Efficiency and emissions of spark-ignited engines are significantly affected by combustion phase which can usually be indicated by crank angle of 50%mass burnt(CA50).Managing combustion phase at the optimal value at which the maximal efficiency can be achieved is a challenging issue due to the cyclic variations of combustion process.This paper addresses this issue in two loops:CA50 set-point optimization(outer loop)and set-point tracking(inner loop)by controlling spark advance(SA).Extremum seeking approach maximizing thermal efficiency is employed in the CA50 set-point optimization.A proportional-integral(PI)controller is adopted to make the moving average value of CA50 tracking the optimal CA50 set-point determined in the outer loop.Moreover,in order to obtain fast responses at steady and transient operations,feed-forward maps are designed for extremum seeking controller and PI controller,respectively.Finally,experimental validations are conducted on a six-cylinder gasoline at steady and transient operations to show the effectiveness of proposed control scheme.
Combustion phase optimization,extremum seeking,feedback control,cylinder pressure,spark-ignited engine
1 Introduction
The combustion phase is one of the most important factors affecting performance,efficiency and emissions of internal combustion engines[1,2].In order to optimize the performance,combustion phase indicator should be controlled around its optimal setpoint where the maximal performance indicator could be obtained[3–6].In this research,the thermal efficiency and the crank angle of 50%burnt(CA50)[7]are set as the performance indicator and combustion phase index,respectively.
In order to maximize the thermal efficiency,CA50 should be controlled to track its optimal reference as concentrated as possible:in spark-ignited(SI)gasoline engine,spark advance(SA)is usually managed in order to track the optimal CA50 reference[1].A statis-tical controller utilizing hypothesis test has been presented by J.Gao to track the preset reference combustion phase indicator[1,8].P.Emiliano proposed a proportion-integration(PI)feedback controller to attain the specific CA50 setpoint by managing the spark ignition and verified the controller at steady and transient conditions[9].However,the optimal CA50 setpoint is not deterministic and may vary with operation conditions,such as engine speed,load,variable valve timing(VVT),etc.Moreover,the optimal CA50 setpoint may be affected by engine aging,and other disturbances like lubricating oil,cooling water,and atmosphere temperature variations[2].Based on these analyses,the combustion phase optimization and control problem in SI engines could be decomposed into two subproblems:combustion phase setpoint optimization problem and combustion phase optimal setpoint tracking problem.
The thermal efficiency could be considered as an unknown function of CA50 coupled with random noise,and thus the combustion phase setpoint optimization forms a stochastic optimization problem. For the combustionphase setpoint stochastic optimization problem,several gradient based stochastic approximation methods iteratively search for the optimal value. The classi-cal Kiefer-Wolfowitz finite differences (KWFD) algorithm[10] and its related simultaneous perturbation stochastic approximation (SPSA) algorithm have been applied [11]for optimization of SA, VVT by D. Popovi [4]. Moreover,sinusoidal perturbation based extremum seeking approach has been recently frequently discussed in related literatures [2, 5, 6].
This paper presents a cylinder pressure based real-time combustion phase optimization and control scheme including two loops:the CA50 optimal set-point extremum seeking controller(outer loop)and a SA proportional-integral(PI)tracking the optimal setpoint(inner loop).The gradient based extremum seeking algorithm is applied to the outer loop.Considering the operation condition may verify along with engine running,the forgetting factor recursive least-squares method(FFRLSM)[12]is utilized to estimate the gradient of CA50-thermal efficiency statistic distribution in real-time.For the inner loop,a SA feedback PI controller is adopted and a moving average block[13]for real-time CA50 value calculated from cylinder pressure signal is utilized due to the strong cycle-to-cycle variations of combustion phase.In order to obtain fast responses at steady and transient operations,feed-forward maps are designed for extremum seeking controller and PI controller,respectively.
The organization of this paper is as follows.Section2 gives the combustion statistic analysis and formulates the combustion phase optimization and control problem.Section3 presents the cylinder pressure based CA50 real-time optimization and control scheme including extremum seeking algorithm and SA PI controller.The details of experiment setup are described in Section4.In Section5,experimental validations are conducted on a SI gasoline engine test bench,and the analysis on the results is reported.Finally,conclusions are presented in Section6.
2 Combustion statistic analysis
2.1 CA50 and thermal efficiency calculation
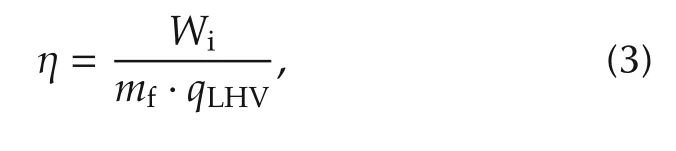
In combustion engines,if the in-cylinder pressure can be measured by the pressure sensor,the crank angle of 50%fuel burnt(CA50)which is one of the most significant combustion phase indicators can be calculated.A pressure trace of motored engine cycle and a pressure of fired engine cycle are shown in Fig.1(a).CA50 of the fired cycle can be determined as the crank angle degree after top dead center (ATDC) where half heat is released.The heat release trace can be expressed as the integration of heat release rate,which is calculated based on the measured in-cylinder pressure trace,from SA to the current angle[14],
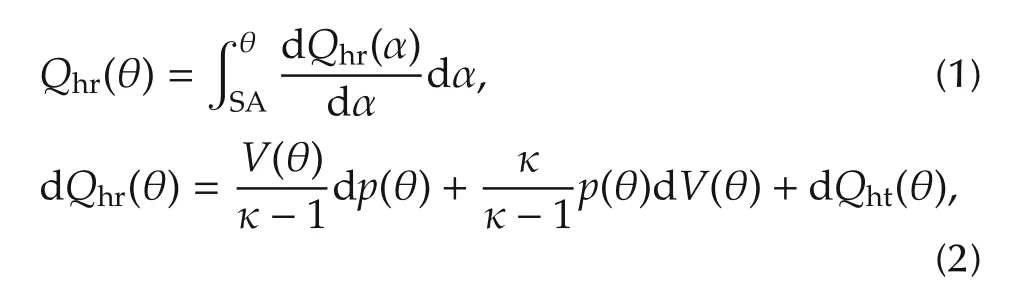
where dQhr(θ)is the heat release rate,κ the ratio of specific heats,p the measured pressure,V the cylinder volume.In addition,the heat transfer part dQhtis set to zero.Then,CA50 is the crank angle where Qmax/2 is achieved,as shown in Fig.1(b).
Thermal efficiency(abbreviated as η),i.e.,indicated fuel conversion efficiency,indicates how efficient the combustion cycle is in converting the fuel energy to mechanical work[14].
where mfis the fuel mass injected in one cylinder during one combustion cycle,qLHVrepresents the energy contents in one kilogram of fuel named low heating value.Wiis the indicated work gas has done on the piston during one combustion cycle.It can be calculated by the following integration over one cycle,

where p is the cylinder pressure,dV is the change rate of cylinder volume.
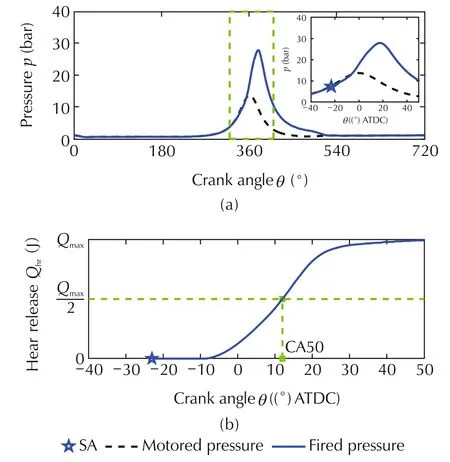
Fig.1 Cylinder pressure and corresponding heat release trace.
2.2 Combustion phase effect on thermal efficiency
In one cylinder if the combustion process or heat release profile of one cycle is specified,the indicated work Wiwill be determinate. Also the thermal efficiency of the cycle can be determined with known fuel injection mass during the cycle.The ideal way to maximize thermal efficiency would be to perfectly maintain the heat release profile along the optimal profile.However,it is difficult to achieve this ideal case in SI engines because it is hard to manage the heat release profile,which is affected by various stochastic factors,once it starts burning.A feasible approach is to manage CA50,one of the most significant indicators reflect the combustion process,at the optimal CA50 set-point where the maximal thermal efficiency could be obtained.The CA50-η statistic distributions of experimental data collected at different intake manifold pressure levels,pm(unit:bar),are plotted in Fig.2(Cylinder#6,1600r·min−1).Each distribution forms a parabola on which the corresponding maximal point exists.It should be noted that the optimal CA50 set-points at different operating conditions are different.Thus it is necessary to optimize the CA50 set-point in real time during engine operation.
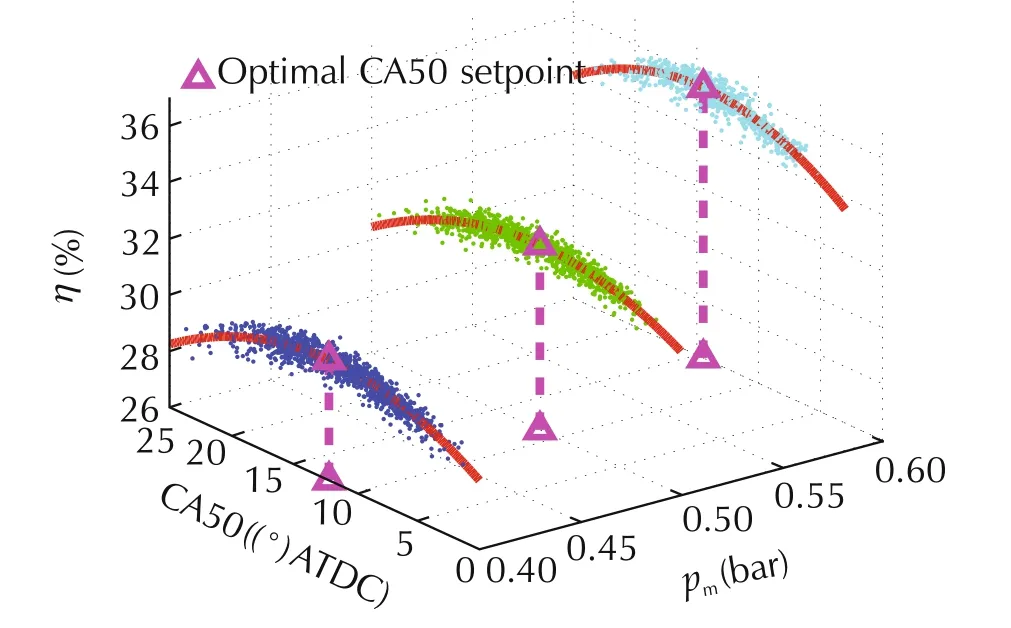
Fig.2 CA50-η statistic distributions.
2.3 SA effect on combustion phase
Combustion phase is significantly affected by SA which is selected as the control input to manage CA50 around its optimal set-point.The SA-CA50 statistic distributions of the same group experimental data when sweeping SA at three manifold pressure levels are plotted in Fig.3(Cylinder#6,1600r·min−1).It can be observed that even maintaining a constant SA command,CA50 forms a stochastic distribution with a mean value.However,the mean value of CA50 can be controlled by SA:with a retarded SA the mean value will be retarded.
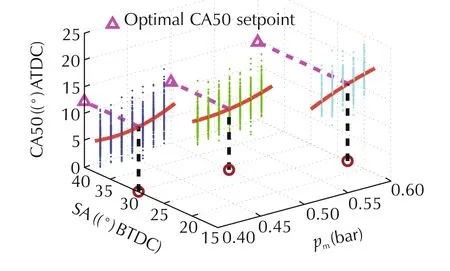
Fig.3 SA-CA50 statistic distributions.
3 CA50 real-time optimization and control scheme
Existing combustion phase control schemes usually set fixed indicator references which are assumed to be optimal,and adopt spark ignition feedback controller to track the fixed references.However,the optimal combustion phase depends on operation conditions,engine aging,fuel quality and water temperature,etc.The existing schemes have much limitation in real-time optimization because the optimality of combustion phase cannot be guaranteed.
In order to maximize the thermal efficiency of combustion engine in real-time,a cylinder pressure based CA50 real-time optimization and control scheme is presented in two parts:CA50 set-point optimization by ex-tremum seeking algorithm(outer loop)and set-point tracking by SA proportional-integral(PI)controller(inner loop).In order to obtain fast responses at steady and transient operations,feed-forward maps are designed for the CA50 set-point extremum seeking controller and the SA PI controller,respectively,as shown in Fig.4.With the real-time measured manifold pressure,pm,and engine speed,n,the feed-forward CA50あand SAあcan be obtained by looking up the two maps,respectively.
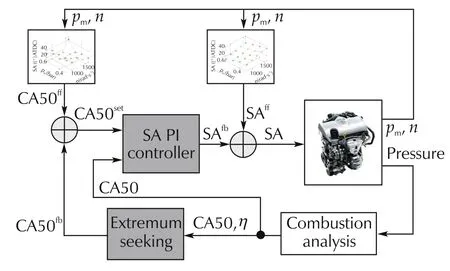
Fig.4 CA50 real-time optimization and control scheme.
Moreover,the maps give rough feed-forward values which are closed to the optimal values,and the outer loop and inner loop only allow for further limited adjustment.Thus the influence of the interconnection of two loops on the stability and optimization error is limited.
3.1 CA50 set-point extremum seeking
Extremum seeking is an iterative optimization process and has been proved to be effective in real-time optimization when plant knowledge is limited.The structure of gradient based extremum seeking controller utilized in the proposed scheme is plotted in Fig.5.A gradient estimator and an optimizer are involved in the paradigm.
As shown in the gradient estimator block in Fig.5,(CA50,η)could be considered as the sample which is calculated from the measured cylinder pressure in each combustion cycle.The gradient could be obtained by analyzing the tendency of CA50-η distribution of the recent past sample points.The forgetting factor recursive least-squares method(FFRLSM)is utilized to estimate the gradient in real-time.


Fig.5 Extremum seeking controller.
For the sake of simplicity,let x,θ and y represent[CA50 1]T,[∇ b]Tand η,respectively.Then equation(5)could be rewritten as follows:

Then the gradient estimated by FFRLSM can be expressed by the following formulas:
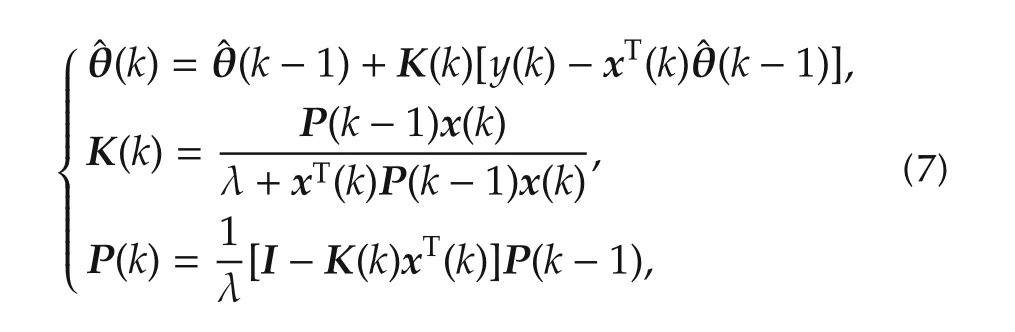
where P(0)andˆθ(0)are the pre-set initial values.The forgetting factor,λ,is usually selected as 0.95≤λ≤1.
For the optimizer block in Fig.5,the iterative form can be expressed as follows:

where∇krepresents the gradient obtained from the gradient estimator at the kth iteration,and akis the step size.
3.2 SA PI controller
In order to track the optimal CA50 set-point given by the feed-forward CA50あand feedback CA50fbfrom ex-tremum seeking controller, a feedforward-feedback SA controller is applied,as shown in Fig.4.The PI controller is worked as the feedback adjustment,SAfb.
As we known,the calculated CA50 has cycle-to-cycle variation.In order to prevent the feedback control from generating strong SA oscillations,a moving average block is adopted to obtain a smooth CA50 value,CA50MA.

where CA50(k)is the real calculated value and αis the weighting factor,0<α<1.Fig.6 shows the cyclic calculated CA50 and the corresponding moving average values with three weighting factor:α=0.90,0.95,0.98.The cyclic CA50 has strong oscillations,while the moving average value will be smoother with a larger weighting factor α.However,a larger α will introduce slow response to transient operation conditions.
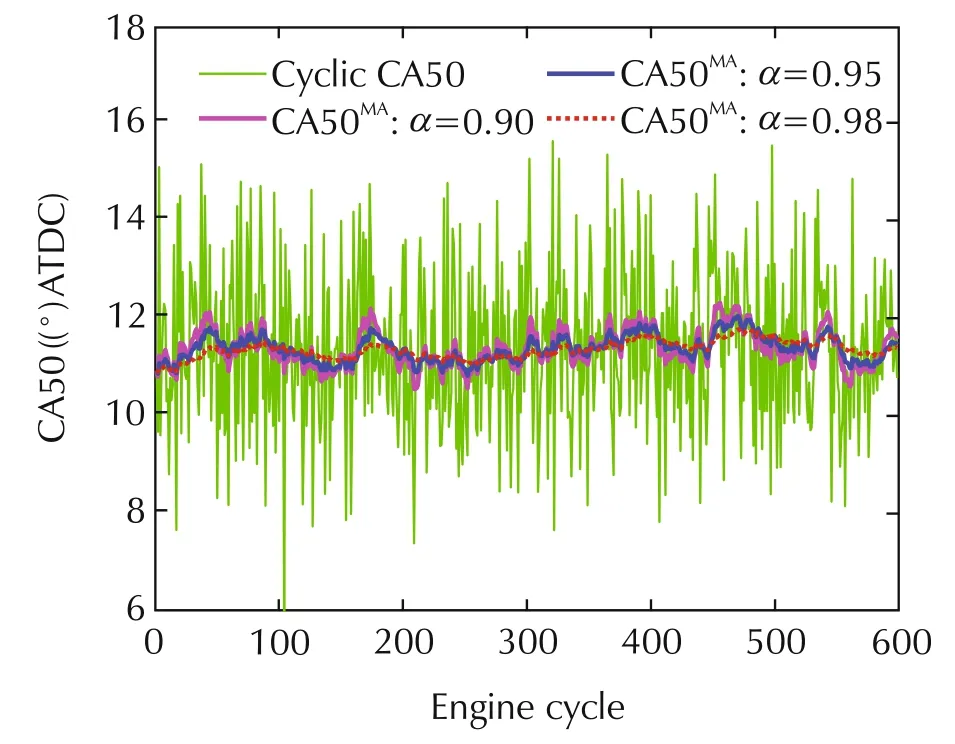
Fig.6 CA50 moving average value with three weighting factors(Cylinder#6,1200r·min−1,throttle angle=6.4°,pm=0.5bar).
The tracking error between the averaged CA50,CA50MAand the set-point,CA50set,could be defined as,

The output of a general SA proportion-integration-differentiation(PID)controller is proportional to the error by coefficient kp,to the integral of the error by coefficient ki,to the derivative of the error by coefficient kd.Thus the feedback SAfbcould be expressed as follows:

As is known,the integral item is effective in eliminating the steady-state error because it is proportional to the accumulated error.The derivative item would have a predictive effect,being proportional to the changing rate of the controlled variable. The disadvantage of derivative item is that the output oscillations will be enlarged due to the measurement noise.In SA control case,the cycleto-cycle variations of combustion process will severely enlarge the SA oscillations.Hence,the derivative item will not be used in order to overcome strong SA fluctuations,as shown in Fig.7.
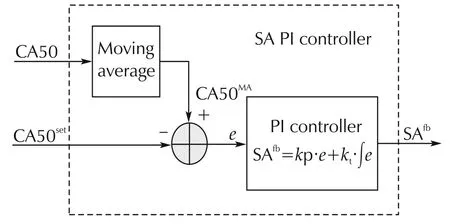
Fig.7 SA PI controller.
4 Experiment setup
The data in this paper are collected on a6-cylinder3.5-liter Toyota SI engine that coupled with a dynamometer,as shown in Fig.8.The technical specifications of the targeted engine is listed in Table 1.
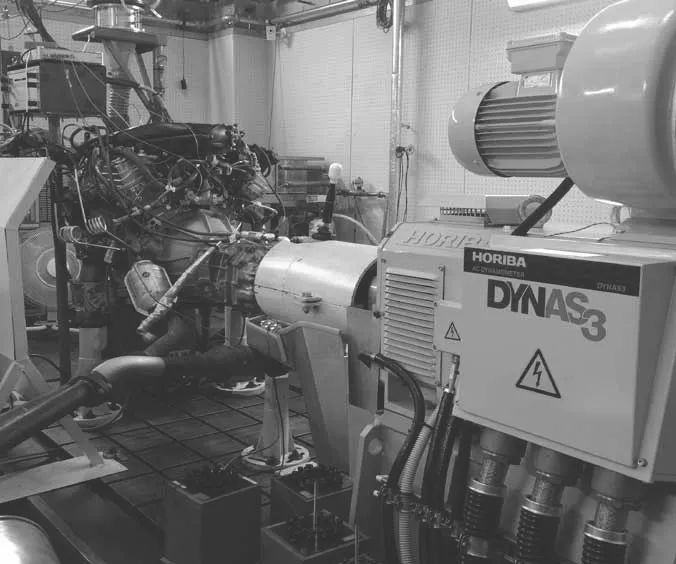
Fig.8 SI gasoline engine test bench.
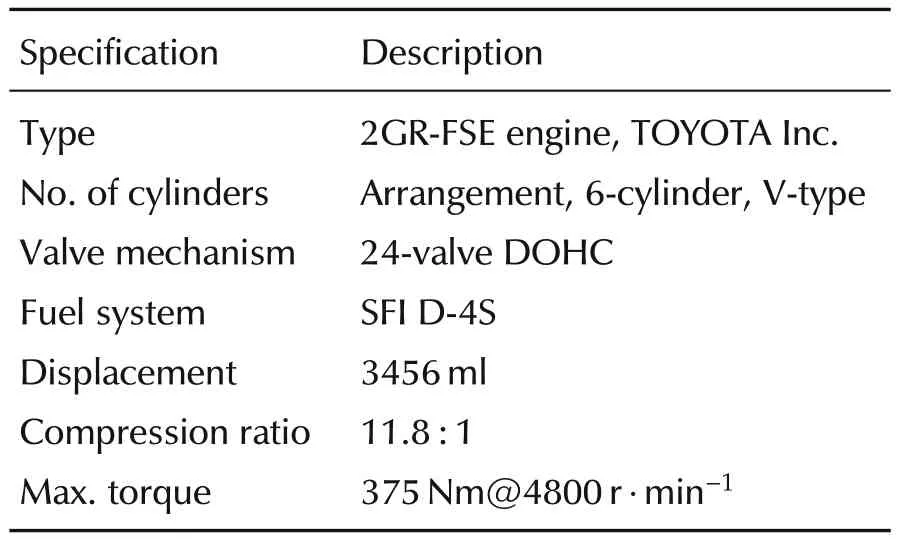
Table 1 Engine specification.
The configuration of the test bench includes engine electronic control unit(ECU),dSPACE 1006 multiprocesser system,various I/O boards,various sensors such as lambda sensor of individual cylinder,air mass flow sensor,NOxsensor,manifold pressure sensor,manifold temperature sensor,exhaust temperature sensor,in-cylinder pressure sensors and so on.Kistler 6052CU20 pressure sensors in the fifth and sixth cylinders and a Kistler 2361B1 encoder on crankshaft are available for in-cylinder pressure collection,which acquisition accuracy is 0.1°.Based on the pressure collected in the sixth cylinder,the CA50 and the thermal efficiency of each combustion cyclecan be calculated.The proposed cylinder pressure based combustion phase optimization and control scheme as shown in Fig.4 is programmed in MATLAB/Simulink,and after be complied it can be downloaded into dSPACE equipment,so that the commends be sent to ECU via bypass could be implemented in each combustion cycle.
5 Experimental validations
Experimental validations are conducted on the engine test bed,including CA50&SA feedforward map calibrations,steady condition operations and transient operations.
5.1 Feedforward map calibration
Calibration experiments have been done at twenty steady operation conditions:the manifold pressure has four levels(0.3,0.4,0.5,0.6)bar,the engine speed has five levels(800,1000,1200,1400,1600)r·min−1,the cooling water temperature is 80 ± 2°C,the lubricating oil temperature is 70 ± 2°C,the room temperature is 25±3°C.
Take three operation conditions for example,keep the engine speed at 1600 r·min−1,the manifold pressure at 0.4,0.5 and 0.6bar.By sweeping SA commands,the CA50-η and SA-CA50 statistic distributions of the six cylinder will be obtained as shown in Figs.2 and 3.Find the optimal CA50 value,where the maximal thermal efficiency could be achieved,in Fig.2.Then find the corresponding SA that results in a mean CA50agree with the optimal CA50 set-point,as shown in Fig.3.Repeat the same calibration process at twenty steady operation points,then the calibrated maps of CA50 feedforward and SA feedforward for the sixth cylinder could be obtained in Fig.9 and Fig.10,respectively.
By measuring the real time engine speed and manifold pressure and doing bilinear interpolation on the calibrated maps,the feedforward information CA50あand SAあcould be obtained in Fig.4.

Fig.9 CA50 feedforward calibrated map of the sixth cylinder.
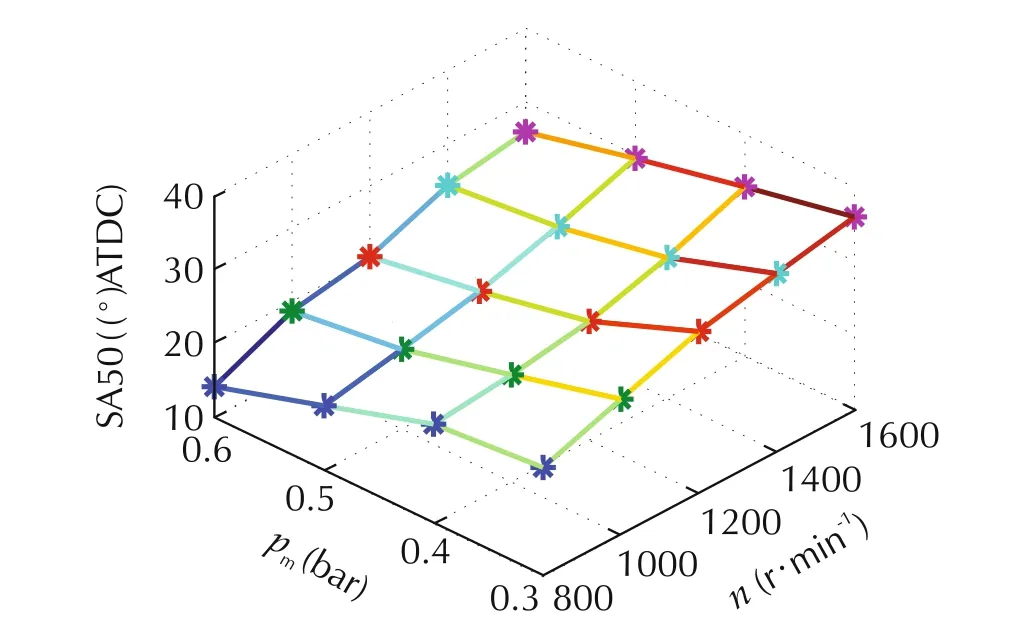
Fig.10 SA feedforward calibrated map of the sixth cylinder.
5.2 Steady condition operations
Experiments have been conducted at the steady condition,constant speed mode:the throttle angle is 5.8°,the engine speed is 1200r·min−1,the cooling water temperature is 80°C,the lubricating oil temperature is 69°C,the room temperature is 27°C.
The forgetting factor in FFRLSM and the weighting fac-tor in moving averaging block are both set as 0.95.Two groups of experiment have been done with different parameters of controller: the first group adopts parameters ak=5,kp=3,ki=3,the second group adopts parameters ak=10,kp=5,ki=5.The control performances of two groups are plotted in Figs.11 and 12,respectively.Subplot(a)shows the real-time gradient estimated by FFRLSM.The CA50 setpoint extremum seeking trace,the cyclic calculated CA50 trace and the moving average CA50MAtrace are compared in subplot(b).The SA control command trace produced by the controller is shown in subplot(c).Subplot(d)gives the cyclic calculated thermal efficiency and the moving average thermal efficiency traces.The vertical dashed line represents the starting of control. Compare the control performances of the two groups,we can find that with the given fixed SA command the gradients are both less than zero before starting the controller(subplots(a)and(c)).After starting the controller,the CA50 setpoint from extremum seeking will converge to its optimal value(subplot(b)),and at the same time the gradient will be maintained around zero(subplot(a)).By managing SA,the moving averaging CA50 value,CA50MA,will track the CA50 setpoint very well(subplot(b)).As a result,the thermal efficiency will be increased slightly(subplot(d)).
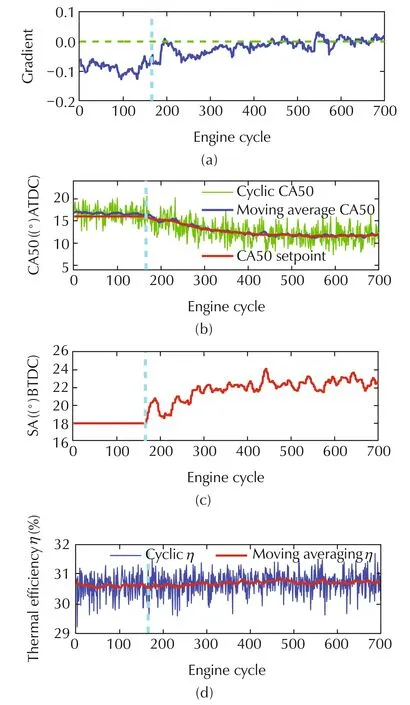
Fig.11 Control performance at the steady condition:ak=5,kp=3,ki=3.
We also can conclude that with conservative control parameters the SA and CA50 setpoint oscillations are small,however the disadvantage is that the CA50 setpoint will convergent slowly(Fig.11).While adventurous control parameters result in faster convergence of CA50 setpoint but larger SA and CA50 setpoint oscillations.
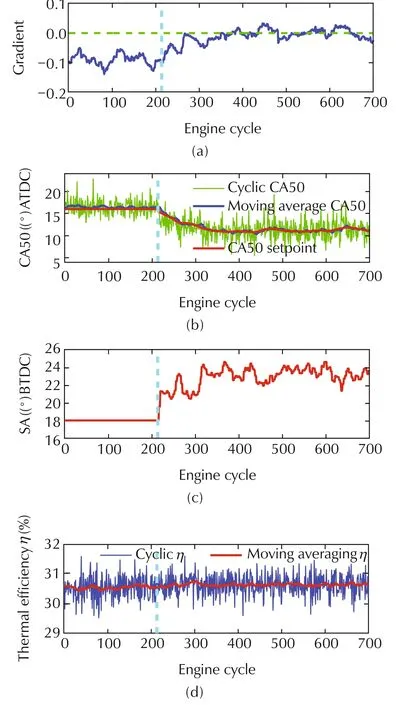
Fig.12 Control performance at the steady condition:ak=10,kp=5,ki=5.
5.3 Transient operations
Transient experiments of both the existing scheme and the proposed control scheme are conducted at the constant torque mode:the torque is 64Nm,the cooling water temperature is 80°C,the lubricating oil temperature is 70°C,the room temperature is 30°C.Give a periodic sine wave throttle opening command with the mean 5.8°and the period 60s,as shown in Fig.13(a).
The engine speed and the manifold pressure varying profiles are plotted in Fig.13(b)and(c),respectively.
The control results of the proposed scheme plotted in Fig.14show that the oscillations of gradient in Fig.14(a)are larger than those in Fig.11(a)and(b).However,the mean of gradient could be always managed around the zero,i.e.,CA50-thermal efficiency statistic distribution could be maintained around the vertex.
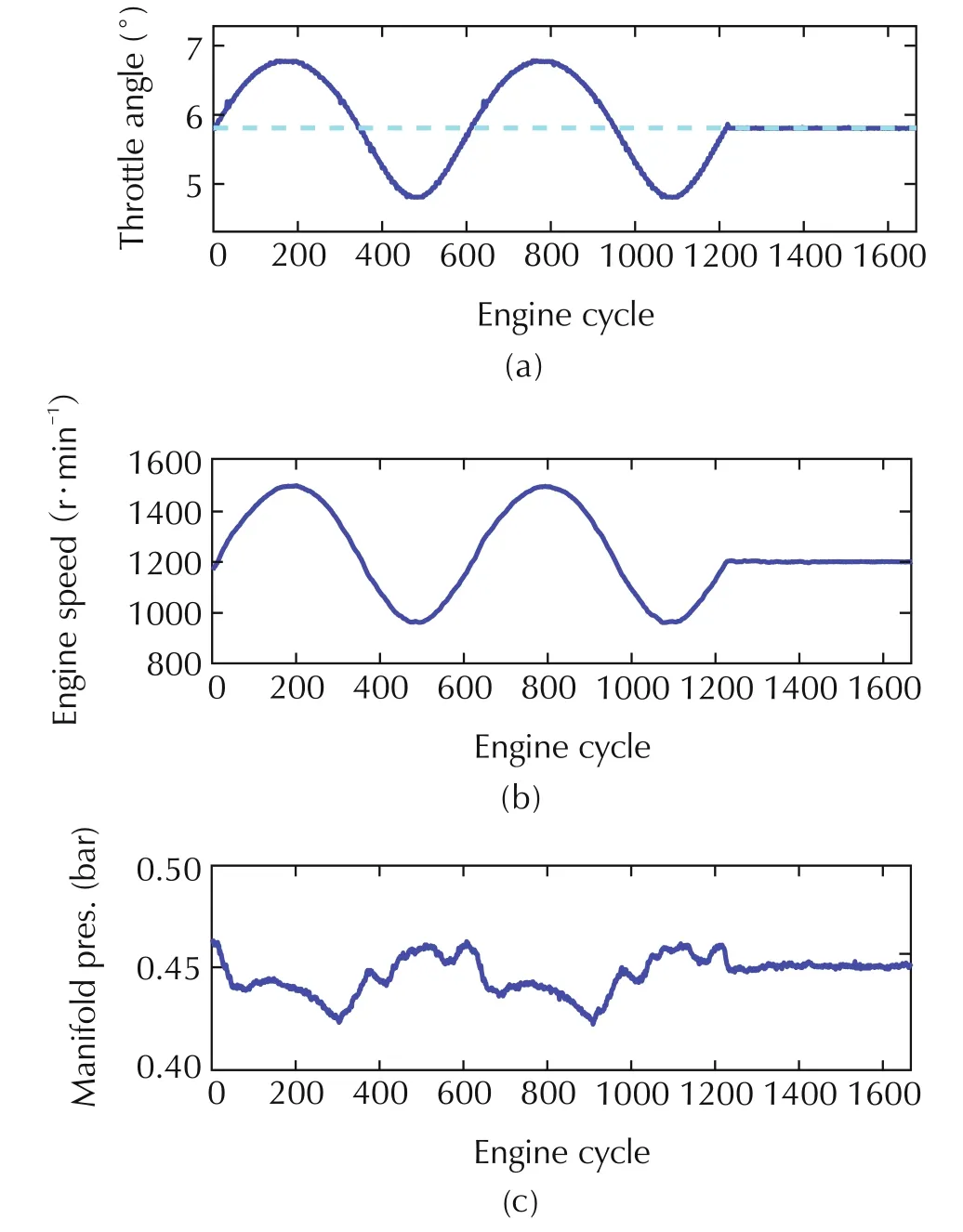
Fig.13 Throttle opening and engine speed in transient operation at constant torque mode 64Nm.

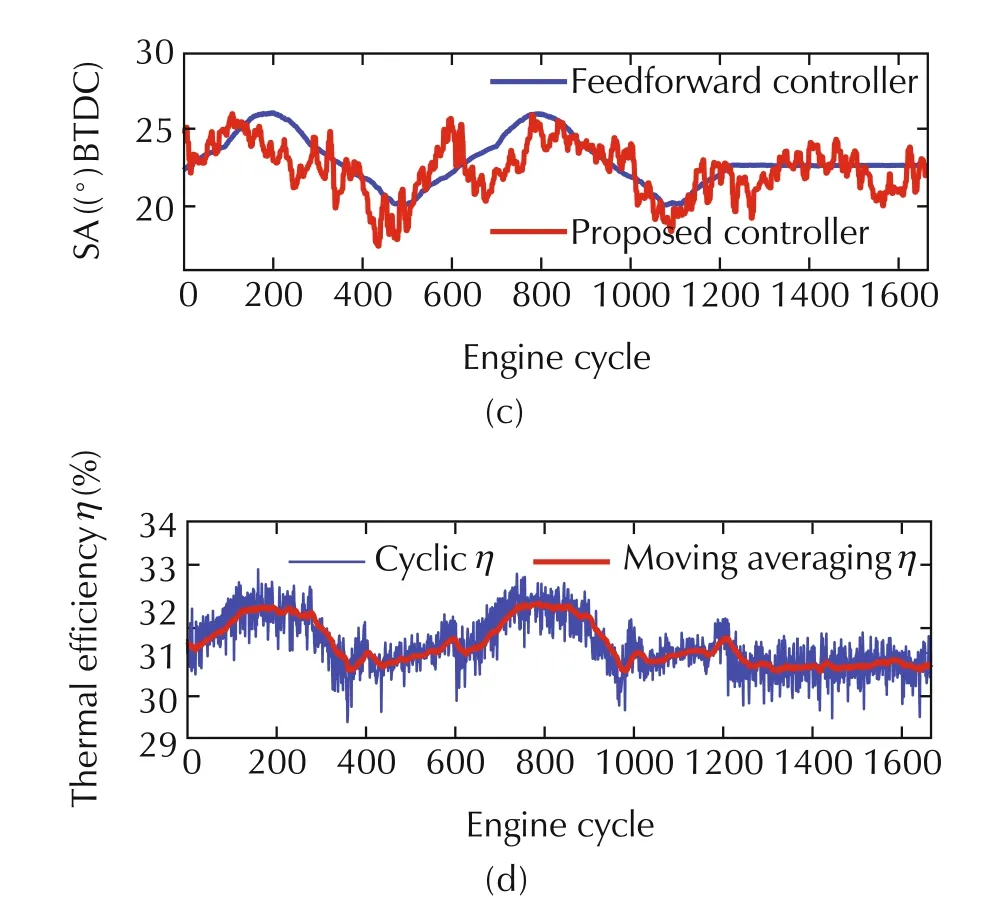
Fig.14 Control performance of the proposed scheme at transient condition:ak=10,kp=5,ki=5.
The control results of the existing scheme are plotted in Fig.15.The fixed CA50 reference value is set as 15°ATDC,as shown in Fig.15(c).The calculated cyclic CA50 can track the reference by using SA PI controller,as shown in Fig.15(c)and(d).However,the oscillations of gradient in Fig.15(a)are large,and the gradient is far from zero during engine operation,i.e.,CA50-thermal efficiency statistic distribution cannot be maintained around the vertex at all time.
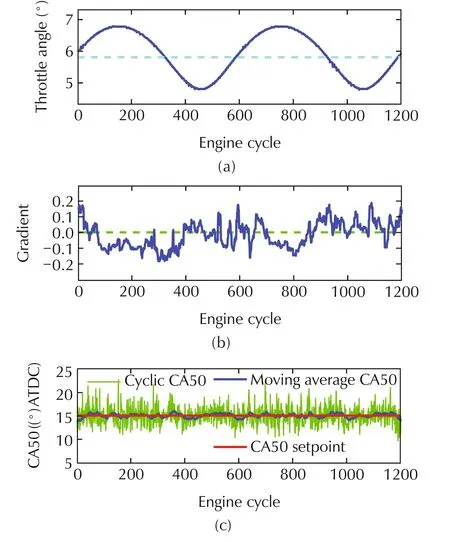
Fig.15 Control performance of the existing scheme at transient condition:kp=5,ki=5.
6 Conclusions
The combustion phase control that aims to maximize the thermal efficiency in spark-ignited engines is decomposed into two subproblems:combustion phase set-point optimization and set-point tracking.With this in mind,a cylinder pressure based feedforward-feedback real-time control scheme including two loops is proposed in this paper.The outer loop employs a gradient based extremum seeking algorithm in which the gradient is estimated by the forgetting factor recursive least-squares method(FFRLSM).The inner loop adopts a spark advance PI controller.Experimental validations conducted on a SI engine at steady and transient operations clam the effectiveness of the proposed control scheme:the CA50 setpoint could be optimized dynamically in real-time by extremum seeking loop and the real-time calculated cyclic CA50 could track the setpoint even in transient operations.
[1]J.W.Gao,Y.H.Wu,T.L.Shen.A statistical combustion phase control approach of SI engines.Mechanical Systems and Signal Processing,2017,85:218–235.
[2]E.Corti,C.Forte,G.Mancini,et al.Automatic combustion phase calibration with extremum seeking approach.Journal of Engineering for Gas Turbines and Power,2014,136(9):DOI 10.1115/1.4027188.
[3]E.Corti,C.Forte.A statistical approach to spark advance mapping.Journal of Engineering for Gas Turbines and Power,2010,132(8):DOI 10.1115/1.4000294.
[4]D.Popovi,M.Jankovi,S.Magner,et al.Extremum seeking methods for optimization of variable cam timing engine operation.IEEE Transactions on Control Systems Technology,2006,14(3):398–407.
[5]E.Hellstrom,D.Lee,L.Jiang,et al.On-board calibration of spark timing by extremum seeking for flex-fuel engines.IEEE Transactions on Control Systems Technology,2013,21(6):2273–2279.
[6]D.Lee,L.Jiang,H.Yilmaz,et al.Preliminary results on optimal variable valve timing and spark timing control via extremum seeking.IFAC Proceedings Volumes,2010,43(18):377–384.
[7]E.Pipitone.A comparison between combustion phase indicators for optimal spark timing.Journal of Engineering for Gas Turbines and Power,2008,130(5):DOI 10.1115/1.2939012.
[8]J.W.Gao,Y.H.Wu,T.L.Shen.Experimental comparisons of hypothesis test and moving average based combustion phase controllers.ISA Transactions,2016,65:504–515.
[9] E.Pipitone.Spark ignition feedback control by means of combustion phase indicators on steady and transient operation.Journal of Dynamic Systems,Measurement,and Control,2014,136(5):DOI 10.1115/1.4026966.
[10]J.Kiefer,J.Wolfowitz.Stochastic estimation of the maximum of a regression function.The Annals of Mathematical Statistics,1952,23(3):462–466.
[11]J.C.Spall.Multivariate stochastic approximation using a simultaneous perturbation gradient approximation.IEEE Transactions on Automatic Control,1992,37(3):332–341.
[12]L.Lennart.System Identification:Theory for the User.Englewood Cliffs:Prentice Hall,1987.
[13]J.S.Hunter.The exponentially weighted moving average.Journal of Quality Technology,1986,18(4):203–210.
[14]L.Eriksson,L Nielsen.Modeling and Control of Engines and Drivelines.Chichester:Wiley,2014.
25 November 2016;revised 12 January 2017;accepted 18 January 2017
DOI10.1007/s11768-017-6175-1
†Corresponding author.
E-mail:zhangyahui@eagle.sophia.ac.jp.Tel.:+81 3 3238 3306.
This work was supported by Toyota Motor Corporation.
©2017 South China University of Technology,Academy of Mathematics and Systems Science,CAS,and Springer-Verlag Berlin Heidelberg
Yahui ZHANGreceived the M.Sc.degree in Control Science and Engineering from Yanshan University,Qinhuangdao,China,in 2011.He is currently working toward the Ph.D.degree with the Department of Engineering and Applied Sciences,Sophia University,Tokyo,Japan.His current research interests include stochastic optimization,machine learning and application in automotive power train.E-mail:zhangyahui@eagle.sophia.ac.jp.

Tielong SHENreceived the Ph.D.degree in Mechanical Engineering from Sophia University,Tokyo,Japan,in 1992.He has been a faculty member with the Department of Mechanical Engineering,Sophia University,since 1992,where he currently serves as a professor with the Department of Engineering and Applied Sciences.His current research interests include control theory and application in mechanical systems,power systems,and automotive power train.E-mail:tetu-sin@sophia.ac.jp.
杂志排行
Control Theory and Technology的其它文章
- Towards to dynamic optimal control for large-scale distributed systems
- Comparison of generalized engine control and MPC based on maximum principle
- MPC-based torque control of permanent magnet synchronous motor for electric vehicles via switching optimization
- Online calibration of combustion phase in a diesel engine
- Optimal heat release shaping in a reactivity controlled compression ignition(RCCI)engine
- Two-degree-of-freedom H-infinity control of combustion in diesel engine using a discrete dynamics model