一种绝缘子检测机器人的电场分析及优化设计
2017-12-20吴观斌慕世友段博涛程养春
贾 娟,吴观斌, 慕世友,段博涛, 郭 锐,仲 亮, 雍 军, 唐 赈,程养春
(1.山东鲁能智能技术有限公司,济南250101;2.国网山东省电力公司,济南250001;3.国网山东省电力公司电力科学研究院,济南250021;4.北京市高电压与电磁兼容重点实验室 (华北电力大学),北京102206;5北京华电天能电力技术有限公司,北京102206)
一种绝缘子检测机器人的电场分析及优化设计
贾 娟1,吴观斌2, 慕世友3,段博涛4, 郭 锐3,仲 亮1, 雍 军1, 唐 赈5,程养春4
(1.山东鲁能智能技术有限公司,济南250101;2.国网山东省电力公司,济南250001;3.国网山东省电力公司电力科学研究院,济南250021;4.北京市高电压与电磁兼容重点实验室 (华北电力大学),北京102206;5北京华电天能电力技术有限公司,北京102206)
基于500 kV交流输电线路上的双串悬式瓷绝缘子串,对自主研制的一款超、特高压绝缘子检测机器人的典型部件周围的电场分布进行了仿真计算,分析了部件形状、尺寸以及所携带的电场测量探头对局部最大电场强度的影响规律,进而给出了机器人部件形状、尺寸及电场测量探头的优化设计。研究结果表明:机器人导向机构金属支撑杆端部电场较大,非常可能引发放电,采用绝缘材料后,可大大降低其表面最大场强;控制箱进行倒角处理或采用球形结构可大大降低其表面最大场强;电场测量探头直径不宜超过10 cm,与绝缘子伞裙间隙应大于1 cm。
输电线路;绝缘子;检测;机器人;电场
0 引言
绝缘子串检测机器人能够运行于超、特高压输电线路中悬垂和水平双联绝缘子串,开展光检测[1-2]、电阻测量[3]、电场测量[4-5]等带电作业项目,综合评价绝缘子的运行状态,对于提高带电作业自动化水平、保障电网安全具有重要意义[6-7]。开展绝缘子检测机器人带电检测,高电压等级下的电磁干扰是应考虑的问题[8]。
机器人在带电检测绝缘子串的过程中,主要遇到的电磁干扰将来自机器人上尖端部位的电晕放电、机器人金属部件上的感应电荷造成的部件之间的悬浮电位放电、机器人与高压导线和均压环之间的电弧放电等。其中,机器人与高压导线之间的电弧放电造成的电磁干扰最为强烈。这些放电现象可以产生强大的电磁辐射。外界电磁辐射能够直接降低机器人检测系统的有效性能和技术指标,增大通信系统的误码率和降低信息的可靠性[9-10]。
特别是机器人移动到绝缘子串的高压端端部时,机器人与高压金具之间可能会发生电弧放电。这种放电带来的强大电磁场辐射和电流冲击不但影响仪器和设备的正常工作,而且可能烧毁机器人部件[11-14]。
因此,笔者基于有限元法,仿真分析机器人在500 kV双串绝缘子串上运动时,典型结构的电场分布情况,给出合适的结构优化建议,降低局部强电场,避免电晕放电、悬浮电位放电、电弧放电等各种放电现象的发生,提高机器人工作的可靠性和准确性。
1 绝缘子检测机器人介绍
作者研制的一款绝缘子检测机器人,可以用于架空输电线路瓷绝缘子串的停(带)电检测,适用于水平和悬垂布置的瓷绝缘子串,具备电阻测量、电场测量和可见光检测功能,综合判断劣化绝缘子。机器人总体结构见图1,包括控制箱、导向与抱紧机构、移动机构、检测部件等。
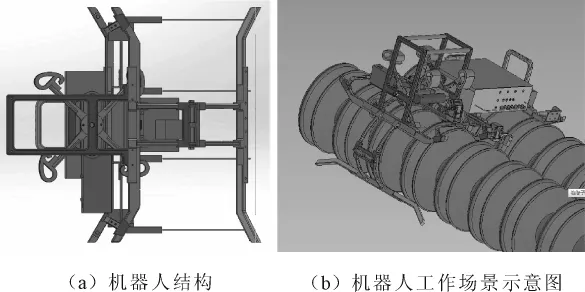
图1 机器人机械结构图Fig.1 The mechanical structure of the robot
1.1 控制箱
控制箱内部放置了控制电路、电源、电机等部件。控制箱为不绣钢长方体箱子,为控制电流和电子部件提供电磁屏蔽保护。
1.2 导向与抱紧机构
导向与抱紧机构采用4~5根雪橇状导向杆导向,使机器人沿绝缘子串轴向移动;导向杆之间有垂直的圆弧状抱紧机构相连,并且采取环抱的形式将导向杆压紧在绝缘子串表面。
考虑到机械强度的要求,导向杆中存在铝合金杆件和尼龙杆件,整体上与绝缘子串轴线平行;抱紧机构中存在铝合金杆件,整体上与绝缘子串轴线垂直。
1.3 移动机构
移动机构包括驱动电机和十字支架。驱动电机为钢制外壳,位于控制箱内部。十字支架为硬铝合金材质,可以绕轴转动。十字支架的末端安装有尼龙滚轮,与绝缘子接触。当十字支架转动时,尼龙滚轮压迫绝缘子伞裙,反作用力使之间的轴相对于绝缘子发生移动,进而带动机器人移动。
1.4 检测部件
检测部件主要包括电场测量探头、电阻测量探头和图像探头等。其中电场探头、图像探头等部件需要伸出控制箱之外,并另行设计金属屏蔽壳为其提供电磁屏蔽保护。
2 仿真模型
基于有限元软件ANSYS进行仿真分析,以某500 kV线路所用的双联耐张型XWP-210双伞瓷绝缘子串(2×30个,共计60个)为例,建立了绝缘子串仿真模型。其中绝缘子主要结构参数见表1。在绝缘子串高压端和均压环上施加408 kV电压,在绝缘子串接地端施加0 V电压,对绝缘子串周围电场强度进行仿真计算。

表1 绝缘子串主要结构参数Table 1 main parameters of the insulator strings
由于机器人结构较为复杂,不利于结构优化的仿真分析,故本文不对机器人整体建模,仅将控制箱简化成长方形金属壳体,将导向与抱紧机构和移动机构中的金属部件和绝缘部件分别简化成金属杆和绝缘杆,将检测部件简化成球形金属壳体,并且单独与绝缘子串模型结合,依次进行仿真分析。将机器人的部件单独仿真,排除了各部件之间的相互屏蔽,因而仿真结果偏于严酷,有利于发现最严重的局部电场增强现象。由于高压端导线对机器人各部分结构电场分析影响很小,故没有建立高压端导线的模型。这种简化使得该处电场大于均压环电场。仿真模型见图2。
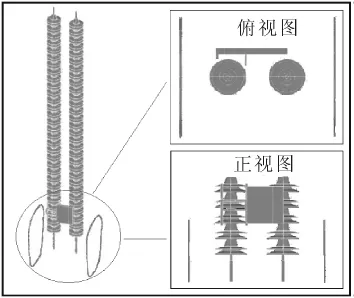
图2 仿真模型Fig.2 The simulation model
仿真结果显示,在没有机器人的情况下,高压导线和均压环附近电场强度较大,其中均压环上表面最大电场达到3 kV/mm左右。电场分布云图见图3。从图3(a)可知,高压侧第3片绝缘子离均压环导体较近,导致第3片绝缘子与均压环之间的空间电场稍微强于其他绝缘子周围的空间电场。此外,高压侧第1片绝缘子离高压端导体较近,周围空间电场也比较强。因此,本文研究机器人周围电场时,假设机器人的典型部件位于第3片绝缘子和第一片绝缘子附近。

图3 绝缘子串电场分布云图Fig.3 The electric field cloud graph of the insulator strings
3 仿真结果与优化设计
3.1 控制箱
控制箱为长方体金属外壳,存在棱边和尖角,是局部电场较为集中的一个部件。常用的改善其周围电场的措施是对棱边加圆弧倒角,并将尖角处理成圆角。最理想的情况是整个控制箱显球形。因此,对控制箱建立了3种模型进行仿真对比:1)长200 mm、宽200 mm、厚50 mm的长方体;2)经倒角处理的长方体(倒角半径为10 mm);3)直径为200 mm的球体。
图4显示了长方体控制箱处于高压侧第3片绝缘子附近时,控制箱及其邻近绝缘子表面的3维电场分布矢量图。其中颜色和箭头长度均表示电场大小。图4中为了突出显示控制箱表面的电场,除了控制箱和绝缘子表面区域外,其他区域的电场未做显示。控制箱的最大电场出现在箱子的右下棱角处。上述3种形状的控制箱处于不同位置时的表面最大场强见图5。
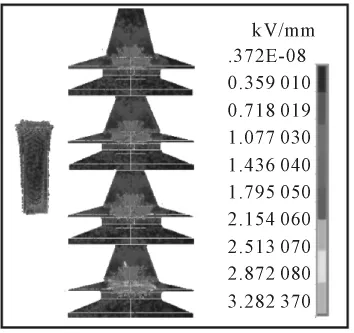
图4 长方体控制箱电场分布矢量图Fig.4 The electric field vector graph of the cubic control box
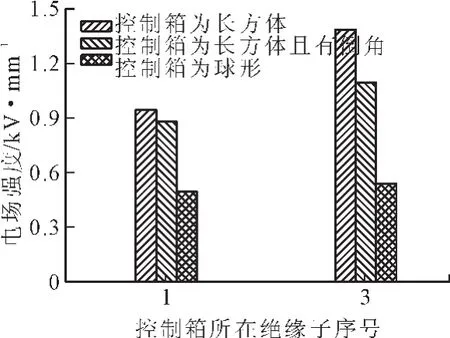
图5 不同形状控制箱表面最大电场Fig.5 The maxim electric field on the surface of control box with different shape and position
结果显示,不同形状的控制箱的电场从大到小依次为长方体、长方体带倒角、球形。相同形状的控制箱,位于第3片绝缘子时最大场强大于位于第1片绝缘子时。位于第3片绝缘时,长方体控制箱表面场强最大,达到1.38 kV/mm。鉴于有限元刨分单元尺寸的限制,长方体的尖角可能没有完全反映出来,因此该数值比较保守。因此,在该部位,非常有可能发生电晕或者电弧放电现象。
当控制箱带半径10 mm的倒角时,最大场强为为1.09 kV/mm。当控制箱直径等于200 mm球形时,电场最大值为0.524 kV/mm,与长方体箱体相比最大电场下降约60%,已远离空气的击穿场强3 kV/mm,不太可能发生电晕放电。因此,控制箱的棱边和棱角至少要有半径10 mm的圆弧倒角,最好为球形。
3.2 导向抱紧机构仿真与优化
导向抱紧机构包含的支撑杆存在明显的棱边和尖端,这些突出部位电场比较集中,是另一个需要重点关注的结构。本文仿真了当支撑杆分别位于第1片绝缘子和第3片绝缘子时,横截面分别为矩形和圆形的两种支撑杆的电场分布情况。矩形截面的支撑杆长度为400 mm,截面矩形的边长为10 mm;圆形截面的支撑杆长度为400 mm,截面半径为10 mm,端部有半径为10 mm的半球。
图6显示了圆截面金属杆位于第3片绝缘,并且与绝缘子串轴线平行放置时,金属杆表面的3维电场分布矢量图(为了突出显示金属杆表面的电场,除了金属杆和绝缘子表面区域外,其他区域的电场未做显示)。支撑杆端部电场较大,与直观认识相符。

图6 圆截面金属杆表面电场矢量图Fig.6 The electric field vector graph on the surface of metal rod with circle cross section
不同结构和材料的支撑杆,以及平行放置(与绝缘子串轴线平行)和垂直放置(与绝缘子串轴线垂直)情况下,支撑杆表面最大场强见表2。当支撑杆为金属杆时,无论是位于第3片绝缘子还是第1片绝缘子,平行放置的支撑杆表面最大场强较大,接近或者超过起晕场强3 kV/mm,很可能发生放电;垂直放置的支撑杆最大场强较小,不足1 kV/mm。支撑杆位于第1片绝缘子时的最大电场稍小于位于第3片绝缘的最大电场,这是因为均压环的屏蔽作用。
综上,轴向排列的支撑杆表面电场较大,需要重点优化设计该结构,应采用绝缘材料,表面光滑,不能有尖角结构。其截面应选用圆形,端部加半球圆弧。
3.3 电场探头结构仿真与优化
以往用于绝缘子串零值检测的电场测量探头外形为长方体[4-5],类似前文对长方体控制箱的分析,这种外形的电场探头可能在尖角部位发生放电。球形三维电场探头不但外形上无尖角,不会形成局部强电场,而且能够测量非均匀电场的幅值,因此非常适合检测线路绝缘子串周围的空间电场。笔者重点分析了球形电场探头周围的电场分布情况,用以优化探头的直径。

表2 不同支撑杆的表面电场对比Table 2 The comparison of the electric field on the surface of different rod
笔者仿真计算金属球体分别位于第1片绝缘子和第3片绝缘子附近,并且距伞裙边沿高5 cm时,不同大小球形探头周围的电场分布。探头表面电场矢量图如图7所示。探头表面电场最大值随探头直径的变化规律见图8。

图7 金属球体表面电场矢量图Fig.7 The electric field vector graph on the surface of metal sphere
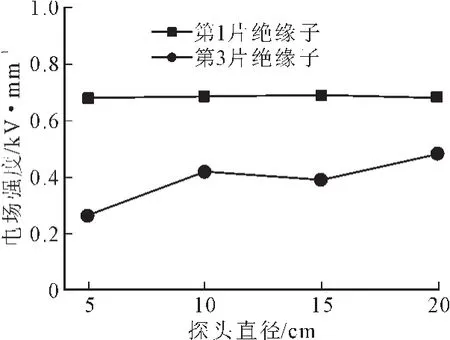
图8 探头表面最大电场随直径的变化Fig.8 The maxim electric field on the surface of the metal sphere with different diameter
可见,直径在5~20 cm探头的最大电场较小,均小于0.7 kV/mm,不会发生电晕放电。其中球形探头位于第3片绝缘子附近时,随着探头直径的增大,最大电场有增大的趋势,这种变化特点可能是因为探头直径较大时,探头表面距离均压环边缘较近,电场集中程度较大;位于第1片绝缘子时,电场基本不变,这可能与均压环的屏蔽作用有关。综合考虑,球形电场探头应做的小一点,直径小于10 cm为宜。
3.4 电场探头与绝缘子间隙的优化
理论上,电场探头越靠近绝缘子串,检测零值绝缘子的灵敏度越高。但是,当探头的金属电极与绝缘子伞裙边沿之间形成小间隙时,有可能出现悬浮电位放电现象,小间隙被击穿。为此,仿真研究了直径10 cm的金属球形电场探头与绝缘子伞裙边沿距离下的电场分布情况。
图9给出了间隙为2 cm时的电场分布云图,在靠近绝缘子的球体表面和绝缘子伞裙边沿电场都比较大。图10给出了最大电场随间隙距离的变化情况。随着间隙的减小,最大场强具有逐渐增大的趋势。实际情况下,金属球表面可能不够光滑,有微小凸起,电场强度可能会超过仿真计算结果。

图9 球形探头与绝缘子间电场分布云图Fig.9 The electric field distribution between the insulator and the spherical probe

图10 最大电场与间隙距离的关系Fig.10 The relationship between the maxim electric field and the distance of the gap
当间隙>1 cm时,其间最大电场小于0.8 kV/mm,数值较小,在实际中产生放电的可能性很小。当间隙为1 mm时,间隙间最大电场在1.4 kV/mm左右,在实际中有可能发生放电。因此,为了保证不会发生小间隙放电,电场探头与绝缘子伞裙间隙不宜小于1 cm。
4 结论
针对自主研制的一款超、特高压绝缘子检测机器人的典型部件结构,基于500 kV双串绝缘子串,仿真计算了长方体、杆件和球体部件周围电场分布情况,对部件的形状提出了优化建议。结论如下:
1)机器人上的长方体控制箱的棱角部位电场较大,边缘应倒角处理 (倒角圆弧半径宜大于10 mm)甚至可以考虑采用球形结构。
2)金属杆件端部电场很大,极有可能发生放电。杆件采用绝缘材料可以大大降低其表面最大场强,并且尽量采用圆形截面和半球形端部结构。
3)直径在5~20 cm的球形电场测量探头表面最大电场均小于0.7 kV/mm。考虑到测量精度,球形探头应当做的尽量小,以直径小于10 cm为宜。
4)电场探头金属部件与绝缘子伞裙间隙可能发生放电现象,不宜小于1 cm。
[1]汪金刚,何为,陈涛,等.绝缘子表面电场与紫外脉冲关系以及在劣化绝缘子检测中的应用 [J].电工技术学报,2008,23(6):137-142.WANG Jingang,HE Wei,CHEN Tao,et al.Relationship between the electric field on the surface of insulators and ultra-violet pulse intensity and its application in detecting faulty insulators[J].Transactions of China Electrotechnical Society,2008,23(6):137-142.
[2]张运楚,梁自泽,谭民.架空电力线路巡线机器人的研究综述[J].机器人,2004,26(5):467-473.ZHANG Yunchu,LIANG Zize,TAN Min.Mobile robot for overhead powerline inspection-a review[J].Robot,2004,26(5):467-473.
[3]杨兴波.新型智能绝缘子检测仪广元投运[N].北京:国家电网报.2010年9月14日/第002版.
[4]程养春,李成榕,马晓华.电场法带电检测零值绝缘子的研究[J].高电压技术,2002,28(z1):8,63.CHENG Yangchun,LI Chengrong,MA Xiaohua.Study on online detection of faulty composite insulators by electric field method[J].High Voltage Engineering,2002,28(z1):8,63.
[5]CHENG Yangchun,LI Chengrong,NIU Chunjie,et al.Porcelain insulatorsdetection bytwodimensions electric field on high voltage transmission lines[C].XV InternationalSymposium on High VoltageEngineering,2007:194.
[6]汪晓,陈垚,单军,等.新型高压输电线路绝缘子检测机器人研发方案[J].电力建设,2015,36(6):77-83.WANG Xiao,CHEN Yao,SHAN Jun,et al.A novel design of insulator detecting robot for HV transmission lines[J].Electric Power Construction,2015,36(6):77-83.
[7]曹涛,孙大庆,赵德利,等.盘形瓷绝缘子检测机器人在架空输电线路中的应用研究[J].电瓷避雷器,2013(2):11-16.CAO Tao,SUN Daqing,ZHAO Deli,et al.Research on the application of disc type porcelain insulators detection robot in overhead transmission lines[J].Insulators and Surge Arresters,2013(2):11-16.
[8]田忠超,杨蔚,赵德利,等.高压带电绝缘子检测机器人的电磁防护[J].自动化与仪器仪表,2015(9):207-209.TIAN Zhongchao,YANG Wei,ZHAO Deli,et al.Electromagnetic protection of high voltage charged insulator detection robot[J].Automation&Instrumentation,2015(9):207-209.
[9]杜雪娇.强电磁场环境下的现场数据采集系统研究[D].南京:南京理工大学,2010.
[10]刘尚合,刘卫东.电磁兼容与电磁防护相关研究进展[J].高电压技术,2014,40(6):1605-1613.LIU Shangge,LIU Weidong.Progress of relevant research on electromagnetic compatibility and electromagnetic protection[J].High Voltage Engineering,2014,40(6):1605-1613.
[11]司荣仁,石立华,陈锐,等.球形光纤传输三维电场传感器[J].强激光与粒子束,2012,24(12):2930-2934.SI Rongren,DAN Lihua,CHEN Rui,et al.Three-dimensional electric-field sensor for spherical fiber transmission[J].High Power Laser and Particle Beams,2012,24(12):2930-2934.
[12]袁超,唐梦颖,赵凯强,等.可溶物成分对XWP2-70绝缘子串污闪特性的影响 [J].高压电器,2016,52(3):118-119.YUAN Chao,TANG Mengying,ZHAO Kaiqiang,et al.Effect of contamination composition on AC flashover performance of XWP2-70 insulator string[J].High Voltage Apparatus,2016,52(3):118-119.
[13]张冠军,赵林,周润东,等.硅橡胶复合绝缘子老化表征评估研究的现状与进展[J].高压电器,2016,52(4):1-2.ZHANG Guanjun,ZHAO Lin,ZHOU Rundong,et al.Review on aging characterization and evaluation of Silicon rubber composite insulator[J].High Voltage Apparatus,2016, 52(4):1-2.
[14]马径坦,赵军平,游浩洋,等.GIS支撑绝缘子表面状况对其雷电冲击闪络特性的影响[J].高压电器,2016,52(4):63-64.MA Jingtan, ZHAO Junping, YOU Haoyang, et al.Influence of surface conditions on flashover characteristics of supporting insulators in GIS under lightning impulse[J].High Voltage Apparatus, 2016, 52(4):63-64.
The Electric Field Analysis and Optimal design on a Robot for Insulator Detection
JIA Juan1,WU Guanbin2,MU Shiyou3,DUAN Botao4,GUO Rui3,ZHONG Liang1,YONG Jun1,TANG Zhen5,CHENG Yangchun4
(1.Shandong Luneng Intelligence Technology Co.,Ltd.,Jinan 250101,China;2.Stat Grid Shandong Province Electric Power Company,Jinan 250001,China;3.Electric Power Research Institute of Stat Grid Shandong Province Electric Power Company,Jinan 250021,China;4.Beijing key Laboratory of High Voltage and EMC (North China Electric Power University),Beijing 102206,China;5.Beijing Huadian Tianneng Electric Power Technology Co.,Ltd.,Beijing 102206,China)
In this paper,based on the double-string suspension porcelain insulator on a 500 kV transmission line,the electric fields around the typical structures of a self-designed robot are simulated.The influence rules of the formation and the scale of the typical structures on the maxim electric field,and the rule of the electric field probe on the maxim electric field are analyzed.Furthermore,the optimal design of the typical structures is suggested.The results show that the electric field at the terminal of the metal guide rod is very high,even could lead to flashover.The guide rod should be made of insulating material,so that the electric field around it will fall down greatly.The metal control box with smooth edge or spherical structure can greatly reduce the amplitude of the electric field around it.At the same time,the diameter of the electric field probe should not exceed 10 cm,and the gap between the probe and the shed of the insulator should be larger than 1 cm.
transmission line;insulators;detection;Robot;electric field
10.16188/j.isa.1003-8337.2017.02.033
2016-01-23
贾娟 (1987—),女,工程师,研究方向为电力机器人。