机器人电场法检测绝缘子的影响因素分析
2017-12-20任志刚段博涛付孟潮程养春
仲 亮,李 勇,任志刚,段博涛,付孟潮,郭 锐,贾 娟,唐 赈,程养春
(1.山东鲁能智能技术有限公司,济南250101;2.国网山东省电力公司,济南 250001;3.北京市高电压与电磁兼容重点实验室 (华北电力大学),北京 102206;4.国网山东省电力公司电力科学研究院,济南 250021;5.北京华电天能电力技术有限公司,北京102206)
机器人电场法检测绝缘子的影响因素分析
仲 亮1,李 勇2,任志刚2,段博涛3,付孟潮1,郭 锐4,贾 娟1,唐 赈5,程养春3
(1.山东鲁能智能技术有限公司,济南250101;2.国网山东省电力公司,济南 250001;3.北京市高电压与电磁兼容重点实验室 (华北电力大学),北京 102206;4.国网山东省电力公司电力科学研究院,济南 250021;5.北京华电天能电力技术有限公司,北京102206)
机器人检测输电线路绝缘子,可大幅降低人工劳动强度,提高检测效率和质量,特别适用于超高压、特高压线路的长绝缘子串。以某500 kV线路双联双伞型绝缘子串为研究对象,基于有限元方法仿真研究双联型绝缘子串上的电场分布特性,研究了电场分量、电场传感器相对于双联绝缘子串和机器人的方位、电场传感器与绝缘子串的距离对零值绝缘子检测灵敏度的影响,以及一串绝缘子串中零值绝缘子对另一串绝缘子检测结果的影响。研究结果表明,选用轴向电场、传感器位于机器人对面并且距机器人轴向距离大于1片绝缘子,将取得最高检测率灵敏度;传感器应尽量靠近绝缘子伞裙,两者间的距离要控制在10 cm以内;双联串绝缘子相互不影响检测结果。
输电线路;瓷质绝缘子;检测;机器人;电场
0 引言
绝缘子作为架空输电线路中导线与杆塔间的支撑连接部件,在保证电力系统正常生产、安全运行,可靠性供电方面占有极其重要的地位。绝缘子串中如有一定数量的劣化绝缘子存在,当由污秽、雷击或其他原因引起闪络时,大电流将流过劣化绝缘子头部,导致绝缘子掉串[1]。因此,为了保证输电线路用绝缘子的运行安全,需定期进行劣化绝缘子检测,从而确定绝缘子是否更换。绝缘子串检测机器人应用于绝缘子检测不但减轻人工检测绝缘子的劳动强度,降低输电线路运维成本,而且提高绝缘子检测质量和效率,日益受到人们的关注[2-5]。
目前绝缘子检测采用的主要方法有绝缘子电阻测量法[6];基于绝缘子串电压分布规律的分布电压检测法[7]、分布电场检测法[8-9];基于绝缘子放电现象的脉冲电流法[10]、紫外成像法[11];基于绝缘子发热现象的红外成像法[12]等。其中,电场法只需检测绝缘子周围的电场,无需接触绝缘子钢脚与钢帽[9],而且只需机器人携带电场探头依次划过绝缘子串的表面,无需机器人的额外配合。因此,基于电场法的低零值检测仪器最适合于装配巡线机器人。
但是,机器人本身一定存在金属部件,将对绝缘子串的电场分布产生影响,进而影响到检测零值绝缘子的效果。针对这一问题,笔者以某500 kV线路双联双伞型绝缘子串为研究对象,借助有限元分析软件ANSYS仿真分析双联型绝缘子串的电场分布特征[13-17],研究在绝缘子串两端和中部3个典型位置(靠近高压侧、绝缘子串中间部分、靠近接地侧)存在零值绝缘子缺陷时,绝缘子周围电场分布规律,以及机器人对其周围绝缘子上电场分布的影响,进而给出电场测量传感器的最佳安装位置,保障绝缘子检测的灵敏度。
1 仿真模型介绍
以某500 kV线路使用的双联耐张型XWP-210双伞瓷绝缘子串(2×30个,共计60个)为研究对象,用有限元分析软件ANSYS进行仿真分析。检测机器人在绝缘子串上的布置见图1。假设机器人和绝缘子串在所加电压下无放电产生,忽略空间电流和沿面泄漏电流,因此选用静电场分析瓷绝缘子串周围的电场分布。
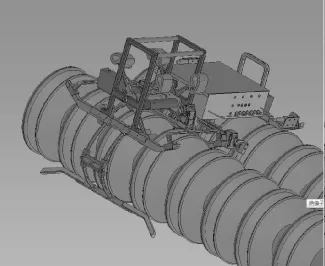
图1 机器人布置图Fig.1 The robot detector
图1所示的机器人具有复杂的机械结构,主要包括控制机构、移动机构、抱紧机构。控制机构主要由控制电路和通讯模块等组成,封装在具有电磁屏蔽功能的金属盒子内。移动机构主要包括绝缘材质的十字移动架和滚动滑轮以及金属结构的驱动电机。抱紧机构包括绝缘导向杆和弹簧结构等。机器人结构比较复杂,完全建模分析难度较大,故对其进行简化处理。将控制机构简化为金属长方体(沿绝缘子串轴线方向长度430 mm,厚度50 mm,宽350 mm);移动机构简化为中空金属长方体 (沿绝缘子串轴线方向长度250 mm,厚度50 mm,宽130 mm),其中间挖去的长方体沿绝缘子串轴线方向长度210 mm,厚度50 mm,宽100mm;抱紧机构简化为沿绝缘子串轴线方向长度480 mm,宽10 mm,厚10 mm的金属方体杆(考虑最严重的情况,将抱紧机构按金属材料分析)。机器人的仿真模型见图2,放置在双串绝缘子其中一串的侧面,并且在研究机器人对绝缘子电场分布的影响时,依次放置在第4、14、28号绝缘子附近。
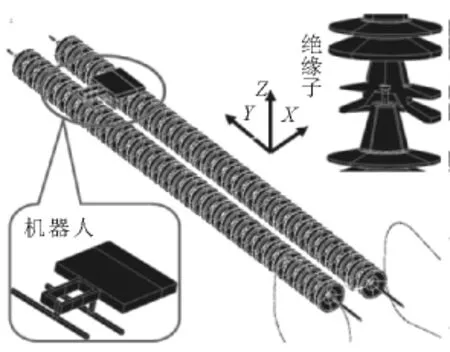
图2 绝缘子串和机器人仿真模型Fig.2 The simulation model of the insulator strings and the robot
绝缘子模型按照表1所示的绝缘子结构参数建立。图2中包含双串XWP-210绝缘子共60片,以及高压侧的椭圆形金属均压环。

表1 绝缘子结构参数Table 1 structurat paramenters of insulator mm
2 仿真结果分析
2.1 良好绝缘子串的电场分布
良好绝缘子串的电场分布云图见图3,高压侧和接地侧伞裙表面电场较大,在绝缘子串中间部分绝缘子表面电场强度较小。
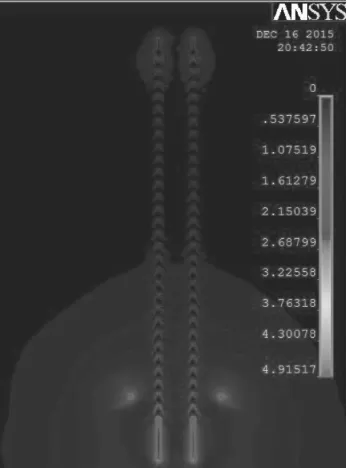
图3 绝缘子串电场分布云图Fig.3 The electric field distribution of the insulator strings without the robot
沿绝缘子伞裙外沿直线(与绝缘子串轴线平行)上的电场幅值分布曲线见图4,电场幅值的曲线整体上先下降后上升,呈现“U”形分布;曲线上存在众多的局部极值,与绝缘子的伞裙对应。即,绝缘子伞裙会引起局部电场的变化,而且伞裙下沿附近的电场会出现极小值。仿真所得的电场分布特征与文献[9]和[11]所述的分布特征相同,故仿真结果是可信的。
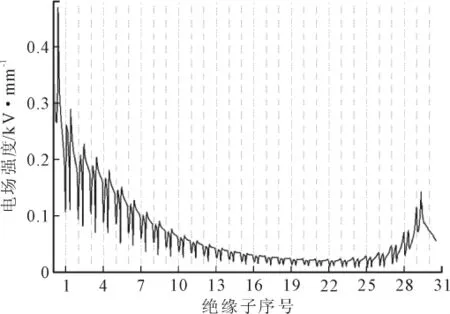
图4 绝缘子串表面电场幅值分布曲线Fig.4 The electric field amplitude distribution on along the surface of the insulator strings
2.2 各电场分量识别零值绝缘子的灵敏度对比
电场矢量可分为X、Y、Z 3个方向上的分量。文献[18]指出,不同的电场分量对零值绝缘子的检测灵敏度不同。故首先研究不同方向的电场分量分布特征及其检测零值绝缘子的效果。针对图2中3个方向电场分量,笔者通过对比高压侧、中部、接地侧等3个典型位置存在零值绝缘子时,各方向电场分量的变化量,来确定适用于低零值绝缘子检测的电场分量。
以图2所示机器人主体滑过绝缘子串表面时的轨迹(与绝缘子串伞裙边沿相垂直、与绝缘子串轴线相平行的一条直线)为测量基线,提取该基线上的电场数据绘制电场分布曲线。此时,x方向平行于双联绝缘子串的平面,与绝缘子伞裙边沿圆弧相切;y方向与绝缘子串轴线一致,y方向的电场被称为轴向电场或者纵向电场;z方向与双联绝缘子串的平面垂直,对应于所谓的径向电场。
2.2.1 总电场幅值分布
总电场幅值(即,电场矢量的幅值,EFSUM)分布见图5,图中纵坐标是测量基线上的电场幅值,横坐标是基线上对应绝缘子序号 (1号绝缘子是高压侧的第一片绝缘子)。当3个典型位置分别存在零值绝缘子时,EFSUM均有显著畸变。
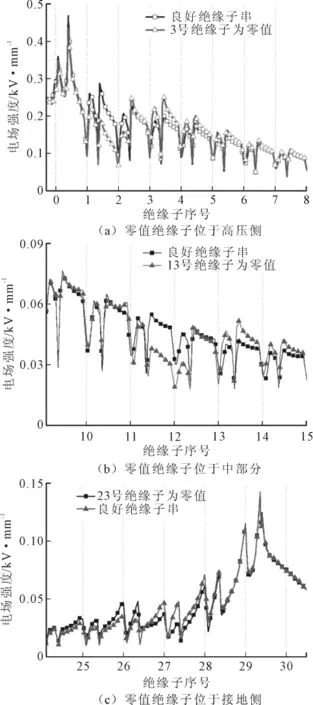
图5 有无零值绝缘子时总电场幅值对比Fig.5 The comparison of the electric field amplitude with and without faulty insulator
在图5(a)中,零值绝缘子(3号绝缘子)伞裙附近的电场值大幅度降低,其前一个绝缘子(2号绝缘子)的钢帽附近的电场也受到削弱,而其后一个绝缘子(4号绝缘子)附近的电场强度有所增大。图5(b)中13号绝缘子为零值,使得13号绝缘子的伞裙和12号绝缘子钢帽附近的电场下降,而14号绝缘子附近的电场增大。
2.2.2 轴向电场幅值分布
轴向电场分量(EF-Y)在3个典型位置有零值绝缘子时的分布曲线见图6。零值绝缘子伞裙及其前一个绝缘子钢帽附近的轴向电场下降,后一个绝缘子伞裙附近轴向电场有所增大。该规律与总电场的幅值变化规律基本一致。
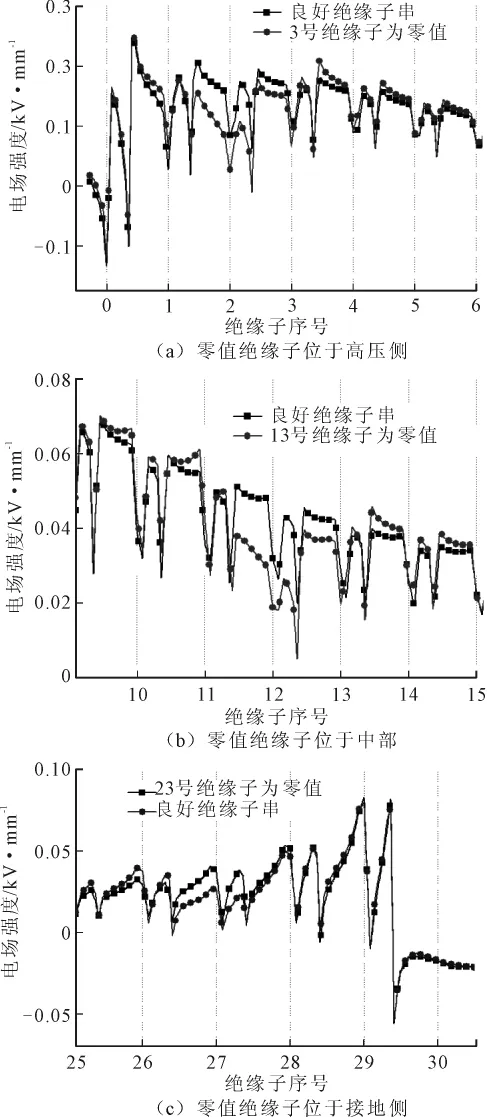
图6 有无零值缺陷时轴向电场分量对比Fig.6 The comparison of the axial direction electric field amplitude with and without faulty insulator
2.2.3 径向电场幅值分布
如图7所示,零值绝缘子伞裙附近的径向电场分量(EF-Z)增大,而其前一个绝缘子钢帽附近的径向电场减小。当零值绝缘子子处于串中间部位时,径向电场的畸变比较明显。
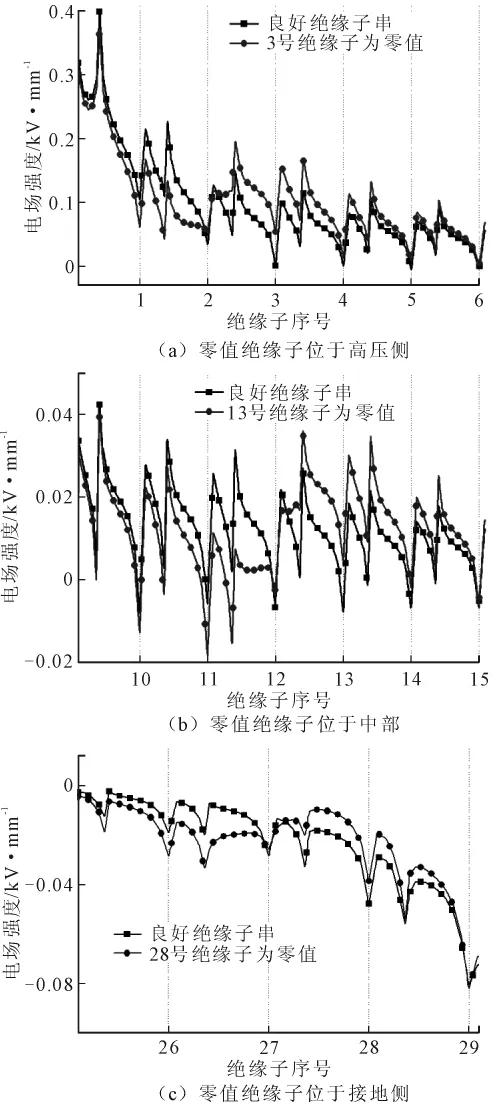
图7 有无零值缺陷时径向电场分量对比Fig.7 The comparison of the radial direction electric field amplitude with and without faulty insulator
2.2.4 切向电场分布
切向场强分量(EF-X)的分布见图8。从图中可以看出,在3个典型位置有无零值绝缘子时,切向电场幅值基本不变,且幅值很小。
2.2.5 各电场分量检测灵敏度对比
综上分析可得,轴向电场检测低零值绝缘子的灵敏度最高,其次是总电场,再次是径向电场。而切向电场不能检测出零值绝缘子。当零值绝缘子位于绝缘子串中部时,引起的电场变化最大,最容易被检测出来;其次是位于高压侧的零值绝缘子;位于接地侧的零值绝缘子引起的电场变化最小。
2.3 不同方位的检测灵敏度对比
测量绝缘子串的电场分布曲线时,沿不同的测量基线获得的曲线反映零值绝缘子的灵敏度也不同。本文以总电场为例,分析了机器人对如图9所示的4种位置上的测量基线检测灵敏度的影响,进而确定电场传感器相对于机器人的最佳方位。
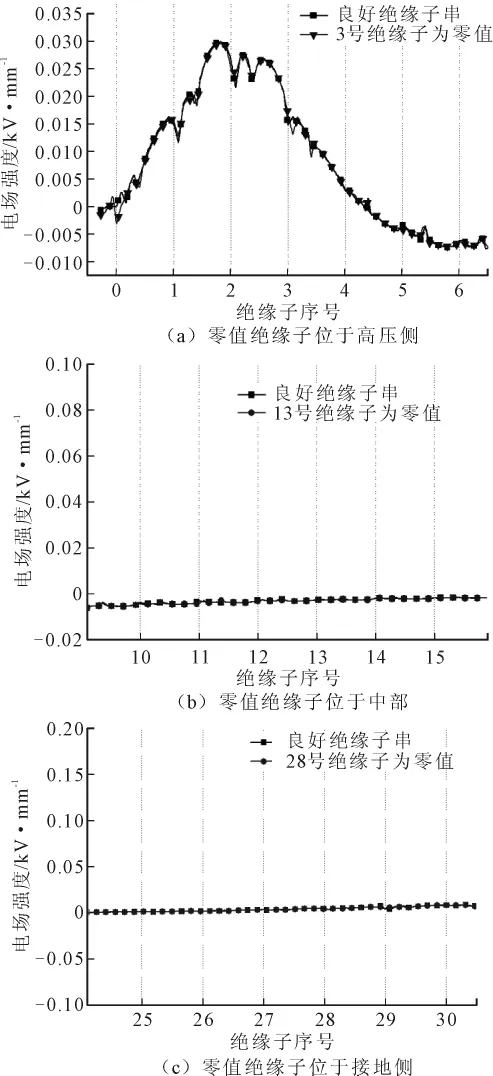
图8 有无零值缺陷时切向电场分量对比Fig.8 The comparison of the tangential direction electric field amplitude with and without faulty insulator
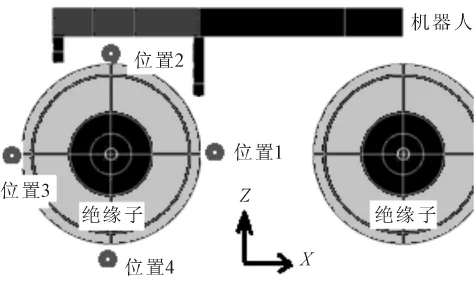
图9 相对于机器人的四个监测点方位示意Fig.9 The location of the detection point relative to the robot
仿真结果见图10。当高压侧第4号绝缘子变成零值绝缘子时,沿处于位置1的测量基线获得的总电场幅值分布曲线见图10(a),零值绝缘子使得总电场显著下降。沿处于位置2、3、4的测量基线获得的总电场幅值分布曲线分别见图10(b)、10(c)和 10(d)。经对比,位置4上测到的电场下降幅值最大,其次是位置1。位置2受到机器人的屏蔽作用的影响,零值绝缘子引起的电场变化较弱。位置3受到均压环的屏蔽作用,第4号零值绝缘子引起的电场变化较弱。
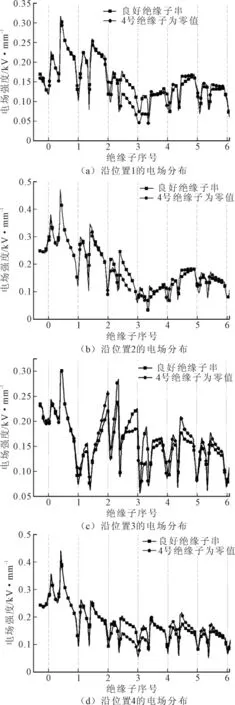
图10 沿不同方位检测零值绝缘子的灵敏度对比Fig.10 The sensitivity comparison of faulty insulator detecting along the four positions
仿真结果还表明,零值绝缘子处于绝缘子串中间部位或接地侧时,所造成的电场变化幅值具有相似规律。即,电场传感器具有最佳灵敏度的位置依次是位置4、位置1、位置 3、位置2。
2.4 机器人对绝缘子串电场分布的影响
从图9可以看出,机器人对位置2的电场会有显著的影响。为了尽量准确测量绝缘子串的电场数据,降低机器人的影响,笔者分析了机器人对绝缘子串的电场分布的影响,以此确定电场传感器应与机器人保持的轴向距离。
放置与不放置机器人时,沿位置2的测量基线上的电场分布特性见图11。从图11看出,机器人在高压侧(4号绝缘子)、串中位置(14号绝缘子)和接地侧(28号绝缘子)时,5片绝缘子(机器人搭接的3片和其前后各1片)的电场受到不同程度影响。当距离机器人超过1片绝缘子时,电场基本不受机器人的影响。因此,当电场传感器距离机器人1片绝缘子以上时(即,电场传感器与机器人之间用绝缘杆支撑,绝缘杆的长度大于1片绝缘子的结构高度),所测到的电场数据基本不受机器人的影响。

图11 机器人对绝缘子串电场分布的影响Fig.11 The influence of the robot on the electric field distribution of the insulator string
2.5 不同检测距离下的检测灵敏度对比
绝缘子串周围的电场强度与方向还与离绝缘子串轴线的垂直距离相关。若电场传感器距绝缘子串越远,则所获取的电场分布曲线中包含的零值绝缘子的信息越弱。本文在位置4对应的方位上,研究电场传感器与绝缘子串轴线距离逐渐增大时,电场曲线的变化情况以及零值绝缘子造成的电场变化,进而确定电场传感器应该与绝缘子串保持的距离。
仿真结果见图12。距离伞裙边缘越远,绝缘子伞裙造成的局部放电变化 (电场曲线的局部峰值特点)越不明显,并逐渐消退形成光滑的“U”形曲线。同时,零值绝缘子处的电场曲线下凹程度逐渐减小,检测灵敏度随之下降。当距离伞裙边沿超过10 cm,电场分布曲线上基本观察不到零值绝缘子产生的电场下降现象,即失去检测零值绝缘子的能力。因此,传感器应尽可能靠近伞裙边沿,两者间的距离要控制在10 cm以内。
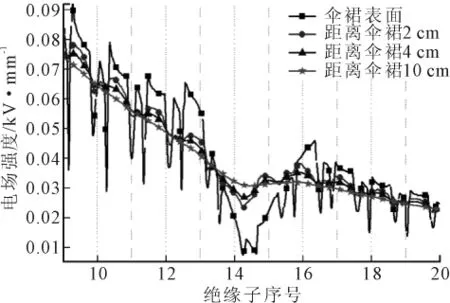
图12 不同检测距离下的电场分布Fig.12 The electric field distribution at different distance
2.6 两串绝缘子间电场的相互影响
双联型绝缘子串中,一串绝缘子的电场分布可能会受到另一串绝缘子中零值绝缘子的影响,进而造成对该串绝缘子的误判。因此笔者研究了一串绝缘子中出现零值绝缘子时对另一串绝缘子伞裙表面电场分布的影响。标记存在零值绝缘子的一串为A串,另一串良好绝缘子串为B串。以选取测量基线处于位置4。当零值绝缘子分别出现在A串的高压侧、串中、接地侧3个部位时,B串在位置4的电场分布见图13。从图中可以看出,3条曲线几乎完全一样,即说明A串上出现零值绝缘子并不会对B串的电场分布造成影响。
3 结论
针对机器人携带电场传感器检测超高压输电线路瓷质绝缘子串中零值绝缘子的需求,通过仿真分析,研究了电场传感器相对于机器人和双联串绝缘子的最佳位置,得出结论如下;
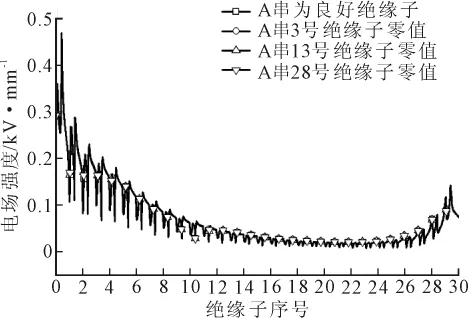
图13 A串中有零值时B串绝缘子的电场分布Fig.13 The influence of one faulty insulator on the electric field distribution of the other string
1)检测灵敏度较高的电场分量依次是轴向电场、总电场、径向电场。切向电场分量不能用于识别零值绝缘子。
2)对于双联串绝缘子串,电场传感器相对于机器人的最佳位置是机器人对面,并且与机器人轴向相距至少1片绝缘子。
3)电场传感器距离绝缘子轴线越远,检测灵敏度越小。为了保证一定的灵敏度,传感器与绝缘子伞裙边沿的距离要控制在10 cm以内。
4)对于双联型绝缘子串,当其中一串出现零值绝缘子时,不会影响另一串绝缘子的检测。
[1]张斌.劣化绝缘子检测技术的国内外研究现状[J].电网技术,2006(S1):275-278.ZHANG Bin.Current study situation of faulty insulator detection method home and abroad[J].Power System Technology,2006(S1):275-278.
[2]张运楚,梁自泽,谭民.架空电力线路巡线机器人的研究综述[J].机器人,2004,26(5):467-473.ZHANG Yunchu,LIANG Zize,TAN Min.Mobile robot for overhead powerline inspection-a review[J].Robot,2004,26(5):467-473.
[3]汪晓,陈垚,单军,等.新型高压输电线路绝缘子检测机器人研发方案[J].电力建设,2015,36(6):77-83.WANG Xiao,CHEN Yao,SHAN Jun,et al.A novel design of insulator detecting robot for HV transmission lines[J].Electric Power Construction,2015,36(6):77-83.
[4]曹涛,孙大庆,赵德利,等.盘形瓷绝缘子检测机器人在架空输电线路中的应用研究[J].电瓷避雷器,2013(2):11-16.CAO Tao,SUN Daqing,ZHAO Deli,et al.Research on the application of disc type porcelain insulators detection robot in overhead transmission lines[J].Insulators and Surge Arresters,2013(2):11-16.
[5]田忠超,杨蔚,赵德利,等.高压带电绝缘子检测机器人的电磁防护[J].自动化与仪器仪表,2015(9):207-209.TIAN Zhongchao,YANG Wei,ZHAO Deli,et al.Electromagnetic protection of high voltage charged insulator detection robot[J].Automation&Instrumentation,2015(9):207-209.
[6]杨兴波.新型智能绝缘子检测仪广元投运[Z].国家电网报,2010.
[7]安玲,江秀臣,朱宇,等.检测劣质绝缘子的新方法—敏感绝缘子法[J].中国电机工程学报,2002,22(9):109-113.AN Ling,JIANG Xiuchen,ZHU Yu,et al.Sensitive insulator method-a new method to detect the faulty insulator[J].Proceedings of the CSEE,2002,22(9):109-113.
[8]程养春,李成榕,马晓华.电场法带电检测零值绝缘子的研究[J].高电压技术,2002,28(z1):8.CHENG Yangchun,LI Chengrong,MA Xiaohua.Study on online detection of faulty composite insulators by electric field method[J].High Voltage Engineering,2002,28(z1):8.
[9]陈瑶,邹德华,牛捷,等.500 kV输电线路中低零值绝缘子对长串绝缘子电位和电场分布的影响[J].电瓷避雷器,2015(3):29-34.CHEN Yao,ZOU Dehua,NIU Jie,et al,The impact of zero and low resistance insulator on potential and electric field distribution of long insulator strings in the 500 kV transmission line[J].Insulators and Surge Arresters,2015 (3):29-34.
[10]CHENG Yangchun,LI Chengrong,HUANG Xingquan.Study of corona discharge pattern on high voltage transmission lines for inspecting faulty porcelain insulators[J].IEEE Transactions on Power Delivery,2008,23(2):945-952.
[11]汪金刚,何为,陈涛,等.绝缘子表面电场与紫外脉冲关系以及在劣化绝缘子检测中的应用[J].电工技术学报,2008,23(6):137-142.WANG Jingang,HE Wei,CHEN Tao,et al.Relationship between the electric field on the surface of insulators and Ultra-Violet pulse intensity and its application in detecting faulty insulators[J].Transactions of China Electrotechnical Society,2008,23(6):137-142.
[12]陈衡,侯善敬.电力设备故障红外诊断[M].北京:中国电力出版社,1999.
[13]屠晔炜,夏强峰.220 kV瓷绝缘子(XP-160)串的空间电场分布特性及其影响因素仿真分析[J].高压电器,2012,48(3):67-74.TU Yehui,XIA Qiangfeng.Simulation of space electric field distribution around 220 kV porcelain insulator string(XP-160) and the influencing factors[J].High Voltage Apparatus,2012,48(3):67-74.
[14]白欢,陈洪波,黄道春.110 kV零值瓷绝缘子电场仿真分析研究[J].四川电力技术,2014,37(2):62-67.BAI Huan,CHEN Hongbo,HUANG Daochun.Simulation analysis on the electric field of 110 kV fualty porcelain in sulators[J].Sichuan Electric Power Technology,2014,37(2):62-67.
[15]郭瑞,郭奇军,韩燕飞,等.126 kV GIS盘式绝缘子金属法兰开孔的电场仿真分析[J].电网与清洁能源,2015,31(5):27-31.GUO Rui,GUO Jijun,HAN Yanfei,et al.The electric field simulation of the metal flange pouring hole of disc-type insulator in the 126 kV GIS[J].Power System and Clean Energy,2015,31(5):27-31.
[16]黄道春,黄正芳,王国利,等.特高压交流输电线路瓷绝缘子串电位和均压环电场分布计算模型的简化[J].高电压技术,2012,38(9):2163-2170.HUANG Daochun,HUANG Zhengfang,WANG Guoli,et al.Calculation model simplification for porcelain insulator string potential and grading ring surface electric field distribution of UHV AC transmission line[J].High Voltage Engineering,2012,38(9):2163-2170.
[17]曹雯,麻焕成,林晓焕,等.110 kV复合绝缘子电场分布影响因素[J].电网与清洁能源,2015,31(7):8-12.CAO Wen,MA Huancheng,LIN Xiaohuan,et al.Influencing factors of electric field distribution for 110 kV composite insulator[J].Power System and Clean Energy,2015,31(7):8-12.
[18]CHENG Yangchun,LI Chengrong,NIU Chunjie,et al.Porcelain insulators detection by two dimensions electric field on high voltage transmission lines[C].XV International Symposium on High Voltage Engineering,2007:194.
Analysis on the Influence Factor of Insulators Detection by Robots and Electric Field Method
ZHONG Liang1, LI Yong2, REN Zhigang2, DUAN Botao3, FU Mengchao1, GUO Rui4,JIA Juan1, TANG Zhen5, CHENG Yangchun3
(1.Shandong Luneng Intelligence Technology Co., Ltd., Jinan 250101, China; 2.Stat Grid Shandong Province Electric Power Company, Jinan 250001, China; 3.Beijing Key Laboratory of High Voltage and EMC (North China Electric Power University),Beijing 102206, China; 4.Electric Power Research Institute of Stat Grid Shandong Province Electric Power Company, Jinan 250021, China; 5.Beijing Huadian Tianneng Electric Power Technology Co., Ltd., Beijing 102206, China )
Detecting insulator by robots can greatly reduce labor intensity and improve efficiency and quality.It is very suit for the long insulator strings on ultra high voltage and extra high voltage power transmission lines.The electric field distribution characteristics of two-string insulators on a 500 kV transmission line was simulated based on the finite element method.The influences of the electric field component,the location of Electric field sensor relative to the twin insulator string and the robot,and the distance between the electric field sensor and the insulator string on the detection sensitivity of faulty insulator as well as the influence of faulty insulator of one insulator string on the detection result of another insulator string were researched.The results show that,the axial electric field and the position against the robot and one insulator far from the robot can lead to the highest sensitivity.The sensor should be near the insulator sheds,and must be within 10 cm distance.For twostring insulators the faulty insulator in one string has no influence on the detection to another string.
transmission lines; porcelain insulators; detection; robot; electric field
10.16188/j.isa.1003-8337.2017.02.028
2015-12-17
仲亮 (1986—),男,工程师,研究方向为电力机器人。
