基于非线性PID控制理论的单相PWM整流器研究
2017-12-20王汝田曾有芝苏小凯王浩伊长春安军
王汝田,曾有芝,苏小凯,王浩,伊长春,安军
(1.东北电力大学电气工程学院,吉林吉林132012;2.国网吉林省电力有限公司吉林供电公司,吉林吉林132012)
0 引 言
PWM整流器具有“绿色”电力电子器件所具备的诸多优点如电网侧无谐波污染、可单位功率因数运行、能量可双向流动等[1]。在电压型PWM整流器控制方面,基于传统线性控制理论所设计的电压环PI控制器存在着系统动态性能差、参数整定困难等缺点。为了提高整流器的总体性能,目前国内外的主要研究方向是采用新的非线性控制理论来重新设计整流器的控制系统[2-3]。
常用的非线性控制理论如鲁棒控制、重复控制、自适应控制等大多集中在解决电流环的控制性能上。如文献[4-7]主要是采用新方法对单相PWM整流器的电流环进行优化研究。
单相PWM整流器的电压环具有稳定直流侧电压的作用并且决定着系统的抗扰性能。而关于单相PWM整流器电压环控制方面的研究存在着两方面的困难。
(1)常规的电压环PI控制器的设计思路是将控制系统进行线性化以获得一个小信号模型。由于这种线性化没有考虑电压环的非线性特性,无法调和PI控制器各性能指标之间的矛盾;
(2)常规电压环PI控制器无法满足工程应用中对PI控制器方法简单,参数效率高的要求。
该文在常规的单相PWM整流器双环控制[8]的基础之上结合文献[9-12]提出一种电压环非线性PI控制方案。通过引入合适的非线性函数设计出新的电压外环非线性PI控制器。在原有的PI控制器参数整定基础之上,对非线性函数的参数进行适当的调整可使单相整流器的暂态性能和抗干扰性能大大提高。利用MATLAB仿真,结果证明了该控制策略的正确性和优越性。
1 单相PWM整流器建模
图1为单相电压型PWM整流器结构图。

图1 单相PWM整流器结构图Fig.1 Topology structure of single-phase PWM rectifier
其中us表示电网电压,L表示交流侧电感,R表示等效电阻,udc表示直流侧电压,C表示直流侧电容,idc表示负载电流,RL表示负载电阻。
假设功率开关管为理想开关,并定义开关函数Sk(k=a,b)为:

根据图1,可建立其状态方程为:

由式(2)可知,单相电压型PWM整流器具有典型的非线性特性。因此可采用新型非线性控制理论来弥补传统的基于线性控制理论所设计的控制策略的不足。
2 单相PWM整流器的电压环控制器分析与设计
2.1 非线性PID控制理论
非线性PID控制器原理[13-14]是:首先获得系统输入信号与系统输出信号的偏差、偏差的微分及其偏差积分,然后对三者进行非线性组合来获得控制信号,以达到利用非线性特性来优化被控系统的暂态性能和稳态偏差的目的。可通过令e、∫e、为偏差、偏差的积分和偏差的微分,利用它们三者之间的非线性组合来解决线性组合带来的超调和快速性之间的矛盾。
该文利用误差e的非线性函数,将其与PI控制器串联即可获得非线性PI控制结构,如图2所示。

图2 非线性PI控制结构图Fig.2 Block diagram of nonlinear PI controller
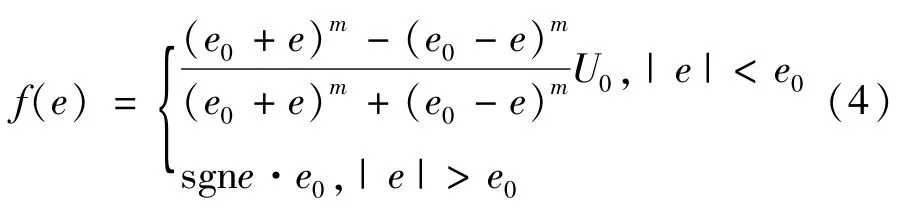
所采用的非线性函数[12]如下:

式中m表示函数的曲率;e0表示系统误差大小;U0表示函数的幅值。其中,当m>0时函数(3)表现单调递增特性,当m<0时函数(3)表现出单调递减特性,而当m=±1时,函数(3)是一种线性函数。考虑到工程实际要求以及系统运行时可能出现的高频颤振现象,在实际应用中可用如下函数代替式(3):
在非线性PID的控制器的具体设计中,首先进行PI控制器的整定,可以参照常规整定方法[15]确定PI控制器的初值,然后结合仿真确定最终值,最后结合文献[12]中的求解方法算出U0初值。由于该非线性函数比较复杂,造成其对应的S域传递函数求解比较繁琐。但是对于一个具体的系统,结合控制理论和仿真效果确定参数m和e0的值是比较容易的。该文主要是结合MATLAB仿真工具,通过对比仿真结果以及结合实际经验,最后确定非线性函数的参数值为:U0=50,m=5,e0=20。
2.2 单相PWM整流器的非线性PI控制器(NPI)设计
该文通过引入网侧电压作为前馈控制,其单相PWM整流器的整体控制框图如图3所示。
该控制方法采用的是常规双环控制方法即交流电流内环和直流电压外环。控制系统的设计原理是:首先通过直流电压外环PI控制器获得电流给定值的幅值,然后通过锁相环PLL获取电压us的相位和频率作为输入电流给定值的相位和频率,进而得到电流给定值。接着通过电流PI控制器,便可得到给定值。将us的1/Us倍减去即可获得交流侧的调制信号,最后生成SPWM算法。其中,电压控制环的结构如图4所示,可以先按照常规的PI整定方法对系统进行校正然后结合仿真效果确定最终PI参数。
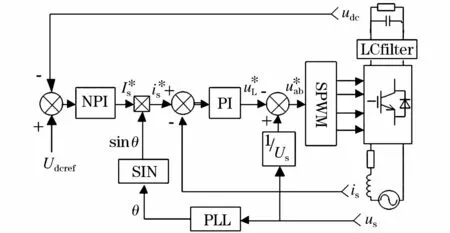
图3 整流器的非线性PI控制拓扑Fig.3 Nonlinear PI control topology of the rectifier
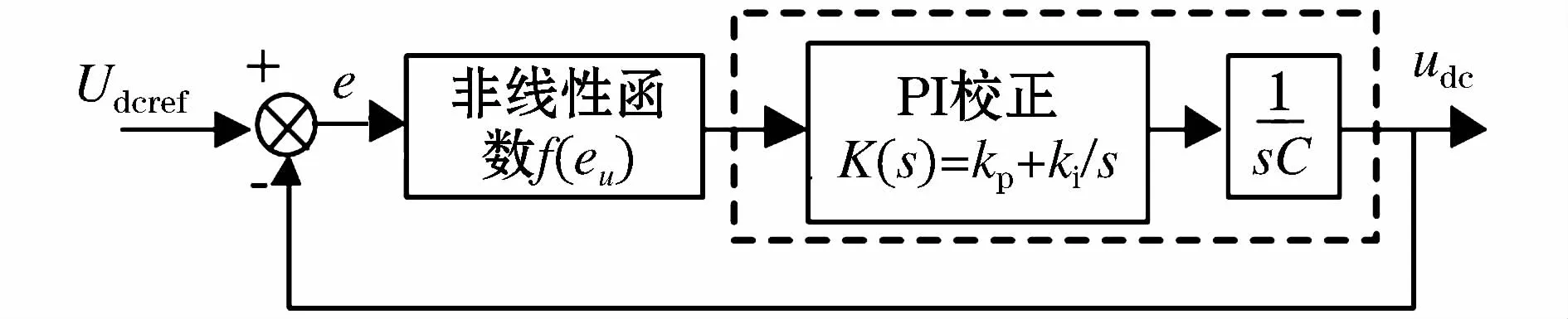
图4 电压环控制拓扑Fig.4 Topology of the voltage loop control
3 仿真结果分析
利用 Matlab/Simulink中的 PSB(Power System Blockset)系统[16]搭建了单相PWM整流的仿真模型,并进行了仿真分析。仿真参数:相电压Us取220 V,频率 fs取 50 Hz,Udc初始值取 450 V,L取 15 mH,交流侧等效电阻R为0.01Ω,C取330μF。二次滤波器(见图3中LC滤波模块)参数:电感取7.6 mH,电容取330μF。负载RL取值:0.0 s~0.7 s取200Ω,0.7 s~1.0 s取400Ω,1.0~1.2 s取200Ω。仿真时两种情况的PI控制参数设置相同,电流环Kp=10,Ki=0.1,电压环 Kp=0.1,Ki=10。然后对比分析两种情况下的响应波形。
3.1 系统启动响应
图5为系统启动响应时的波形图,其中图5(c)表示的是单位功率因数运行时交流电源电压us和交流电流is的波形(为了便于比较,将交流电流放大10倍)。通过对比图5(a)和图5(b)可知加入非线性PI控制器之后直流电压响应速度明显加快(只需要0.07 s左右)而且系统启动无超调,无稳态误差。此时,整流器稳定地运行于单位功率因数状态下(见图5(c))。

图5 系统启动响应波形Fig.5 Waveform of system start-up response
3.2 负载瞬态响应
图6(a)和图6(b)分别表示直流侧参考电压突变情形下使用常规PI控制器和非线性PI控制器控制时的瞬态udc波形图。进行仿真时,在0.3 s时将直流侧参考电压从450 V突增至500 V,在0.5 s把参考电压从500 V突减至450 V。通过对比图6(a)和图6(b)可知,当参电压突然升至500 V时,采用常规PI控制器时电压升高10 V,而且需要较长时间才能回到稳态,持续时间大约需要0.12 s左右;当电压突降至450 V时,电压跌落11 V,同样需要较长时间(0.12 s左右)才能回到稳态。而采用非线性PI控制器时,参考电压突升、突降都不会出现电压升高和跌落的情形,而且回到稳态的时间极短(两种情况都在0.06 s左右)。

图6 直流参考电压突升、突降电压响应Fig.6 Waveform of DC side voltage response when reference voltage abrupt rises and falls
图7(a)和图7(b)分别表示负载突变情形下使用常规PI控制器和非线性PI控制器控制时的瞬态udc波形图。进行仿真时在0.7 s将负载电阻从200 Ω突升至400Ω,在1.0 s时再将负载突降至200Ω。通过对比图7(a)和图7(b)可知,在0.7 s时当负载电阻突然从200Ω升至400Ω时,采用常规的PI控制器时电压出现了较大波动而且出现了长时间的抖动;在1.0 s时将负载电阻从400Ω突减至200Ω,电压出现了较大幅度的下降,回到稳态的时间长而且有抖动。在相同条件下,当采用非线性PI控制器时,电压抖动较小,而且回到稳态所需要的时间大为减少。
通过以上分析可知,当单相整流直流侧电压环采用基于非线性控制理论的PI控制策略时,能显著提高整流器的整体性能。比如该控制策略不仅可以明显地降低甚至消除系统的超调量,而且可以大为缩短系统的暂态周期。

图7 直流侧负载突升、突降电压响应Fig.7 Waveform of DC side voltage response when load abrupt rises and falls
4 结束语
单相PWM整流器的电压控制环中采用非线性PI控制器后,既能使系统在单位功率因数状态下运行,又能明显地提高系统的各方面性能。同时非线性PI控制方案,由于多了三个控制参数可以对控制信号进行一定的修正,然后再经过PI调节器进行调节,能明显解决PI控制器参数整定困难以及超调量与快速性无法兼顾的问题,便于实际应用。仿真结果表明采用非线性PI控制方案具有动态响应好,抗干扰能力强,参数整定简单方便等优点。