无人机低空遥感技术应用
2017-12-20吴永亮陈建平姚书朋
吴永亮, 陈建平, 姚书朋, 徐 彬
(1.中国地质大学(北京)地球科学与资源学院,北京 100083; 2.北京市国土资源信息研究开发重点实验室,北京 100083; 3.中国航天标准化与产品保证研究院,北京 100071)
无人机低空遥感技术应用
吴永亮1,2,3, 陈建平1,2, 姚书朋1,2, 徐 彬1,2
(1.中国地质大学(北京)地球科学与资源学院,北京 100083; 2.北京市国土资源信息研究开发重点实验室,北京 100083; 3.中国航天标准化与产品保证研究院,北京 100071)
为了推广无人机低空遥感技术的应用,对其关键技术进行了研究,分析了无人机低空遥感系统的功能设计与考虑,归纳了工作流程,形成了一套完整的无人机低空遥感应用于地质调查的技术路线。为了验证这一技术方法的实用性,将搭建的无人机低空遥感系统在北京周口店地区进行了应用实验。结果表明,该技术方法可为地质调查、应急测绘等提供及时有效的影像数据,对无人机低空遥感应用具有参考意义。
无人机遥感; 航拍应用; 周口店; Pix4Dmapper
0 引言
无人机低空遥感是传统航空摄影测量手段的有力补充,具有空域申请便利、受气象和起降场地限制小、应用范围广、作业成本低、生产周期短、图像精细等特点。随着无人机平台、载荷设备及数据处理软件技术的发展,无人机低空遥感对快速获取高空间分辨率影像具有明显的优势,在灾害应急处理、基础测绘、土地利用调查、矿山开发监测和智慧城市建设等方面具有广阔的应用前景[1-5]。目前,相关研究主要集中在无人机航摄影像匹配、三维重建和图像识别等方面。将无人机低空遥感技术在各领域中进行应用,还必须掌握无人机遥感系统设计、工作流程规划和数据处理等关键技术。
周口店地区是我国传统的野外地质实习基地之一,尽管多年来该区域积累了大量绘制地质资料,但仍急需该区域的高精度正射影像、三维模型等数据,为地质实习人员提供可靠依据。本文从无人机低空遥感技术应用的角度,对其关键技术进行了研究,搭建了无人机遥感系统,在周口店地区开展了应用实验,获取了周口店地区大范围的高精度的数字高程模型(digital elevation model, DEM)、数字正射影像图(digital orthophoto map,DOM)和数字表面模型(digital surface model,DSM)等数据,为区域地质实习提供了可靠依据,实现了低成本、高效的无人机低空遥感应用,验证了实验所采用技术方法的实用性。
1 系统设计
无人机低空遥感系统一般包括: 无人机平台、飞行导航与控制系统(飞控系统)、地面监控系统、任务设备、数据传输系统、发射与回收系统、野外保障装备以及其他附属设备。在实际应用中,应根据任务需求,选择合适的无人机平台及任务设备。无人机遥感系统一般组成及连接原理见图1。
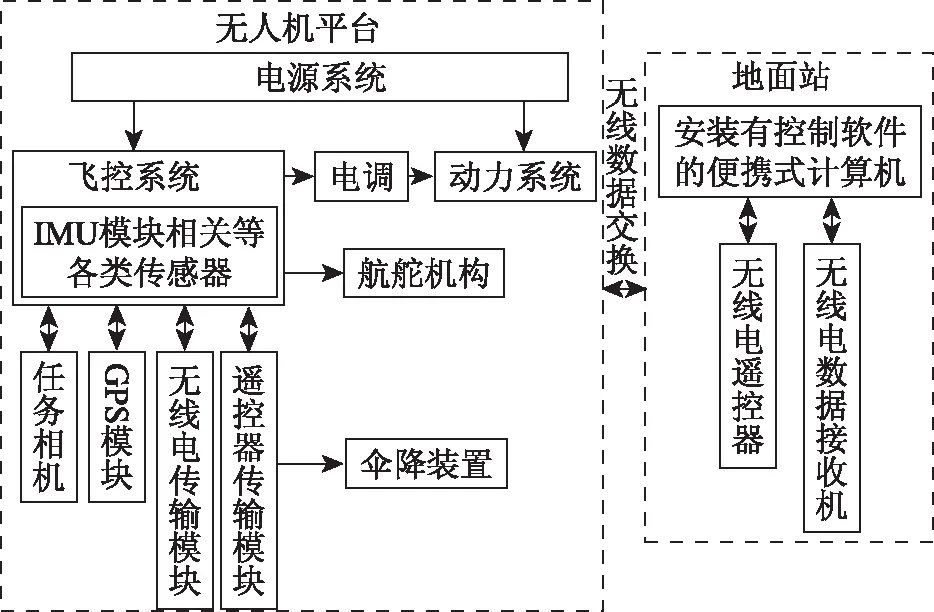
图1 无人机遥感系统组成Fig.1 Configuration diagram of UAV remote sensing system
主要系统功能及设计包括以下几个方面:
1)无人机平台。其主要功能是搭载飞控系统和相机等载荷并执行飞行任务。常用机型有固定翼型和旋翼型2类。固定翼型无人机航速快、续航时间长,适合大范围的航拍工作,作业范围甚至可达几十km2; 旋翼型无人机具有机动灵活、可悬停、起降要求低等优点,但相对航速慢、续航时间短,适合小范围、高精度的调查工作。若开展大面积的航摄调查,一般选择固定翼无人机进行正射投影测量; 若开展精度较高的三维建模,一般选择旋翼型无人机进行倾斜摄影测量。
2)飞控系统、数据传输系统和地面监控系统。飞控系统与数据传输系统是配套的硬件,与地面便携式计算机中安装的监控系统软件匹配使用。飞控系统集成或与之连接的无线电传输模块/遥控器传输模块(空中)跟无线电数据接收机/无线电遥控器(地面)分别匹配,实现对无人机和载荷设备的监测与控制,同步记录航拍时对应影像的POS数据、飞行姿态等参数。
3)任务设备。无人机低空遥感一般采用非测量相机作为任务设备。相机的性能越好,航拍影像的精度、质量等参数越好,但需综合考虑成本、重量等因素。相机由飞控系统自动控制,可实现定点、定时、定距离拍摄。为了提升图像和后期计算的精度,航拍前需要对相机进行标定。随着Pix4Dmapper等软件算法和功能的提升,常可以省略标定工作。
4)发射与回收系统。该系统用于保证无人机安全起飞和着陆。对于固定翼型无人机,在地理环境复杂、场地不具备滑跑条件的区域工作时,一般采用抛射、弹射方式发射和伞降回收。
5)野外保障装备以及其他附属设备。根据野外工作的实际需求,还应配备运输设备、维护工具箱和备附零件等野外保障装备以及其他附属设备,保障无人机航拍作业顺利完成。
CRSwNP呈现高度异质性特征,临床表型通常无法洞察疾病本质,而内在型是建立在细胞、分子和免疫机制基础上的分型,也就是CRSwNP的发病机制。然而,内在型非常复杂,目前研究尚不透彻,通过CRS内在型的探索,可能找到特异性个体病情发展的关键因素,即某些特定的生物学分子标识物,以这些标志物为靶标可实现临床上对于CRSwNP个性化的精准治疗[15,17]。
2 工作流程
相对于传统的航空摄影测量工作,无人机低空遥感通常空域申请便利,升空准备时间短,受气象、起降场地限制较小,对区域地质条件要求较低。规划科学合理的工作流程,是确保无人机低空遥感调查任务成功的重要条件。一般工作流程见图2。
1)根据获取的任务要求进行分析,圈定调查区域,了解任务区域的基本地理信息、天气及航空管制情况,制定无人机飞行方案,确定无人机的起降点、航线、飞行高度和飞行架次等。

图2 无人机遥感调查技术流程Fig.2 Technique process of UAV remote sensing survey
2)根据飞行方案、区域地形、地质条件、航程、载荷和经费等要求,确定无人机系统参数,综合考虑成本效率比,搭建或选择无人机遥感系统。此外,还需设定任务载荷控制参数。由于无人机机体小、重量轻,在空中易受到气流干扰。为保证无人机航摄影像的质量,要求其影像航向重叠度控制在70%~85%、旁向重叠度控制在35%~60%,即需根据影像精度要求、航速、飞行高度和相机参数等确定合理的相机拍摄时间间隔,从而获取有效的、满足数据处理要求的重叠影像[6]。
需要注意的是,除了特别的应急需求,应尽量选择天气较好的时间进行航摄,以确保影像清晰度。在光线允许的条件下,尽量使用定焦镜头,采用小光圈拍摄,并将相机ISO感光度调至最小,否则大光圈景深不够会导致三维模型模糊,而感光度越大则噪声越多。此外,要控制镜头畸变,以保证后期制作的三维模型质量。
3)到达飞行区域后,开展飞行准备工作,包括无人机全系统测试、发射与回收系统准备等,为无人机的顺利起降及安全作业提供必要保障。
4)飞行作业时,通过地面站程控无人机,按照规划的航线自主飞行,控制搭载相机及各类传感器获取飞行姿态、目标地物影像等数据。遥感数据可通过无线数据链路实时传输给地面站,或在无人机回收后通过存储卡读取。
5)获取全部无人机遥感数据后,进行数据匹配、质量检查和坏点剔除等预处理工作。完成基本参数设置后,通过各类无人机影像数据处理软件进行计算、加工和处理,最终输出调查区域的DOM和DEM等数据成果。
3 数据处理
3.1 影像处理软件
当前,无人机遥感影像处理软件主要有: DPGird,PixelGrid,DPMatrix,MAP-AT,FlightMatrix,GodWork,Heli-Mapping,Cloud-AT以及GEOWAY for UAV等国内软件,还有Inpho,Pix4Dmapper,PIEneering,PhotoMOD,LPS,IPS,SSK,Socetset及LISA等国外的软件[8]。这些软件可以完成内定向、空三加密、生成点云模型、DEM提取、影像纠正与拼接和DOM制作等工作。
随着算法和功能的不断进步,各类无人机遥感数据处理软件对计算参数要求越来越低,自动化程度和计算精度不断提升。例如Pix4Dmapper可完全自动地完成整个数据处理过程,甚至无需无人机的飞行姿态数据即可完成影像处理,通过自动空三计算原始影像外方位元素,利用Pix4UAV的技术和区域网平差技术自动校准影像,还可以无需相机检校和控制点数据,依据多目视觉影像三维重建技术生成三维模型。Pix4Dmapper可以处理多个不同相机拍摄的影像,将数千张影像数据合并成一个工程进行处理,拼接为一个影像,快速形成成果图(DOM和DSM等)。此外,Pix4Dmapper可自动生成精度报告,提供定量化的自动空三、区域网平差和地面控制点的精度,快速和正确地评估结果的质量[9]。
3.2 数据处理流程
无人机由于其自重较轻等自身特点的局限性,存在飞行姿态不够稳定等问题,导致所获取的影像有旋偏角偏大、影像畸变和重叠度不规则等现象[10-11]。传统的航空摄影测量数据处理软件处理无人机航摄数据时,工作量大,校对程序复杂。本文采用Pix4Dmapper软件进行数据处理工作,其一般处理流程见图3。
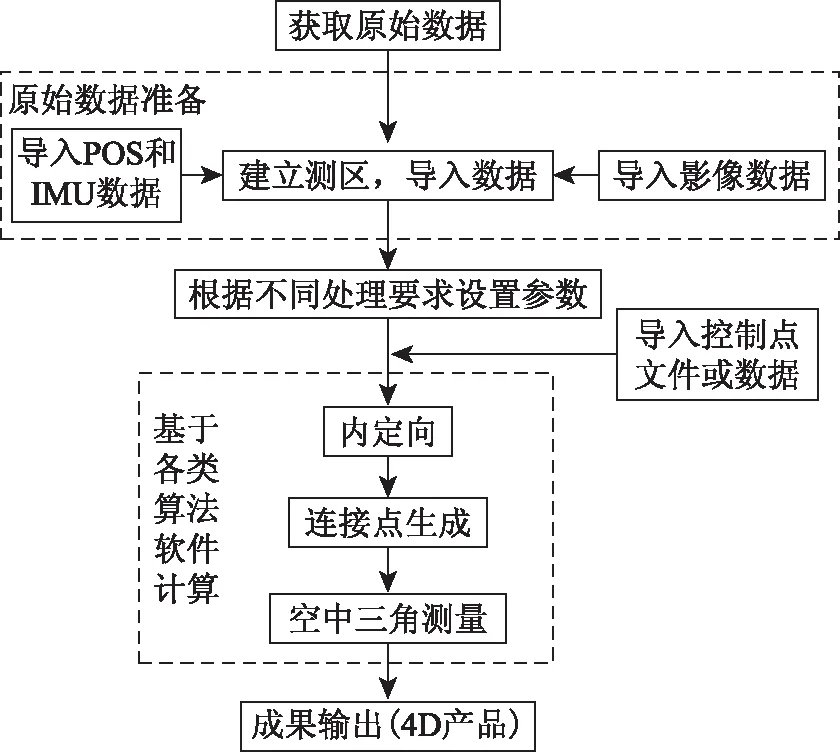
图3 无人机影像处理流程Fig.3 Flowchart of UAV image processing
1)原始数据准备。原始数据包括影像数据、POS数据、飞行姿态数据以及控制点数据。需确认原始数据的完整性,删除质量不合格的影像数据。通过对航带变化处的影像数据进行核对,将每一组数据与影像对应,用于数据处理。控制点有助于提升影像精度。控制点必须在测区范围内合理分布,通常在测区四周以及中间都要有控制点。一般100张相片需要6个控制点左右,更多的控制点对精度也不会有明显的提升,但在高程变化大的地方,更多的控制点可以提升模型精度[9]。
2)参数设置。进行初始化设置、点云加密设置、数据处理与数据成果设置等,主要参数包括: 坐标系参数、地理定位参数、相机参数、DSM及DOM生成参数等。
3)计算及处理。完成数据导入、参数设置后,Pix4Dmapper即可自动进行计算,完成影像重叠匹配、内定向、光束法局域网平差计算以及相机自检校等,利用生成的DEM数据对无人机影像进行倾斜改正和投影差校正,完成影像镶嵌、匀色和裁剪等工作,最终得到调查地区的点云模型、DEM、三维DOM和DSM等[12]。
点云模型进行插值加密后可生成真实三维模型,可用于实际地物的任意距离、面积和体积的测量,见图4。DOM可以采取平面投影和正射投影2种方式生成。平面投影清晰度高,正射投影位置更准确。对DOM和DEM数据进行合成并经过3D MAX和VRP软件的处理还可得到三维演示模型。

(a) 三维模型量体显示 (b) 量体边界圈定及测量结果
图4三维模型的体积量算
Fig.4Volumemeasuringof3Dmodel
4 实例应用
4.1 任务概况
周口店地区位于华北板块中部,是燕山山脉、太行山山脉和华北平原的接壤地带,是我国传统的野外地质实习基地之一。在实际野外实习工作中,急需该区域的高精度DOM、三维模型等数据,为实习人员进行区域整体认知提供依据,对该地区的遥感地质解译情况与野外观察结论进行对比验证。
4.2 飞行方案的设计
本次调查采用的是固定翼无人机平台,其翼展1.2 m,起飞重量1.5 kg,有效载荷300 g; 巡航速度为60~160 km/h,续航时间不小于1.5 h,单次飞行时间在40 min以内; 抗风能力大于4级; 搭载三星NX MINI微单相机,搭配9 mm定焦广角镜头。飞控系统采用Pixhack飞行控制器,集成了GPS,惯性测量、无线电传输和遥控器等模块,自带通用性减震器。地面站采用Mission Planner控制软件,是可以搭建、配置和调试全功能硬件回路的无人机系统的重要构件,具有无人机飞行模拟器界面。设置相关参数后,Mission Planner使用Google Maps就可以进行航点输入,完成航线规划、飞行控制等任务。
选取的飞行测区为位于周口店地质实习基地以东,面积约12 km2的太平山及其周边地质实习区域。该区位于太行山脉北麓与华北平原接壤处,海拔为150~300 m,最高山峰为太平山,海拔301 m,相对高差约为150 m。规划2次航线,东西向和南北向各1航次。考虑到太平山对电台信号的遮挡,将起飞点设定在2个不同的地区,太平山的南坡与北坡各一个。相片的重叠度设定为航向重叠度80%,旁向重叠度60%,相对航高为300 m,地面空间分辨率为10 cm。
4.3 数据获取及处理
实际飞行2航次,飞行任务顺利,共获取照片800余张,相片质量良好。采用手持式高精度GPS接收机,在飞行区域实测控制点28个,并以在测区内均匀分布为原则从中随机抽取了检查点20个。
采用Pix4Dmapper进行无人机低空影像数据处理,将获取的影像数据按照3.2节的流程进行了处理。首先,将影像数据、POS数据以及控制点数据等原始数据进行整理; 然后,建立工程并导入原始数据,设置相机文件,生成航带并采用软件快速处理的方法,生成初步数据结果和质量精度报告,用于检查影像匹配情况和相机模型误差(即最初的相机焦距和计算得到的相机焦距相差不能超过5%,否则需重新设置); 再用像控点编辑器在像片上逐个刺出控制点,并在完成控制点导入后,采用软件高精度处理的方法自动完成内定向、光束法局域网平差计算等; 最后,进行点云及DOM编辑,依次进行点云模型生成、DEM生成、调整拼接线、投影切换、影像混合、生成DOM,最终生成空间分辨率为0.2 m的DOM。全部处理过程耗时156 min。
4.4 结果分析
通过Pix4Dmapper处理生成的周口店地区DOM如图5所示,该影像未经过后期处理。通过目视判读可以看出DOM的拼接效果好,没有明显的错缝,色调均匀,反差适中。

图5 周口店地区的正射影像Fig.5 DOM of Zhoukoudian area
将手动测量检查点在DOM(含DEM高程数据)上的三维坐标与野外实测坐标比对,分析了数据产品的质量,2种处理方法的误差统计见表1。
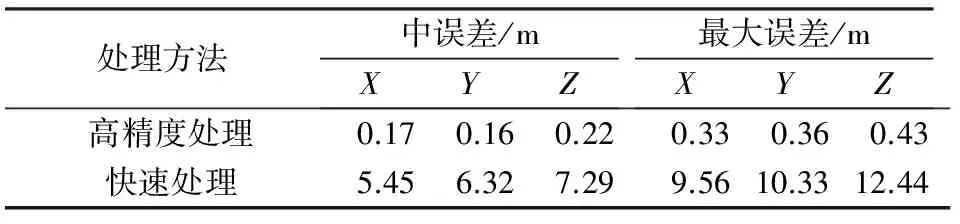
表1 周口店无人机遥感影像数据误差统计Tab.1 Adjustment results of Zhoukoudian UAV data
从表1中可以得出,通过Pix4Dmapper进行高精度数据处理的结果精度较高,生成的DOM和DEM精度符合GB 23236—2009《数字摄影测量空中三角测量规范》中对精度的要求,可以满足常规的地质调查、应急测绘等应用的需要。快速处理的数据精度较低,最大高程误差达到12.44 m,无法满足精确三维建模的需求。这主要是因为快速处理未引入地面控制点数据进行纠正,而无人机飞控系统采集的POS数据精度不够。因此,快速处理一般在飞行现场进行,主要起到快速检查的作用,发现问题可及时纠正,防止后续室内高精度处理时才发现问题,丧失补救时机而导致任务失败。
此外,还可将Pix4Dmapper高精度处理生成的点云模型,直接应用于周口店地质实习的线路规划与距离测量、矿山开发体量计算与监测等工作,具有较高的精度、很好的实用性与时效性。
5 结论
1)本文对无人机低空遥感应用技术进行了研究,在周口店地质实习区开展了应用实验,获取了目标区域0.2 m空间分辨率的影像及DOM等数据,处理时间、影像质量和成果精度均满足常规地质调查、应急测绘等应用需求,验证了实验所采用技术方法的实用性,为无人机低空遥感技术应用提供了参考。
2)规划合理的工作流程是顺利完成无人机低空遥感应用工作的重要保证。在实际工作中,必须考虑调查区域的地理信息、天气及航空管制情况,合理制定无人机飞行方案。
3)无人机遥感系统的搭建与拍摄参数确定是顺利完成飞行任务的关键。需要根据飞行方案、航程和载荷等搭建无人机遥感系统,根据航速、飞行高度等确定合理的相机拍摄时间间隔或相片重叠度参数,以满足后期数据处理要求。
4)采用成熟、专业的无人机影像数据处理软件,可将工程人员从各类繁杂的影像算法中解脱出来,专注于处理业务问题,可大大提高无人机低空遥感的应用效率。随着无人机低空遥感系统数据采集设备精度的提高和数据处理软件算法的进步,无人机低空遥感技术将在灾害应急处理、土地利用调查、矿山开发监测和智慧城市建设等方面发挥越来越显著的作用。
[1] Colomina I,Molina P.Unmanned aerial systems for photogrammetry and remote sensing:A review[J].ISPRS Journal of Photogrammetry and Remote Sensing,2014,92:79-97.
[2] 李德仁,李 明.无人机遥感系统的研究进展与应用前景[J].武汉大学学报(信息科学版),2014,39(5):505-513,540.
Li D R,Li M.Research advance and application prospect of unmanned aerial vehicle remote sensing system[J].Geomatics and Information Science of Wuhan University,2014,39(5):505-513,540.
[3] 无人机航测[EB/OL].[2016].http://baike.baidu.com/view/5426384.htm.
UAV aerial photography[EB/OL].[2016].http://baike.baidu.com/view/5426384.htm.
[4] 韩文权,任幼蓉,赵少华.无人机遥感在应对地质灾害中的主要应用[J].地理空间信息,2011,9(5):6-8,163.
Han W Q,Ren Y R,Zhao S H.Primary usages of UAV remote sensing in geological disaster monitoring and rescuing[J].Geospatial Information,2011,9(5):6-8,163.
[5] 何 敬,李永树,鲁 恒,等.无人机影像地图制作实验研究[J].国土资源遥感,2011,23(4):74-77.doi:10.6046/gtzyyg.2011.04.14.
He J,Li Y S,Lu H,et al.Research on producing image maps based on UAV imagery data[J].Remote Sensing for Land and Resources,2011,23(4):74-77.doi:10.6046/gtzyyg.2011.04.14.
[6] 王玉鹏.无人机低空遥感影像的应用研究[D].焦作:河南理工大学,2011.
Wang Y P.Study on Low-Level Remote Sensing Images of UAV[D].Jiaozuo:Institute of technology of Henan,2011.
[7] 张祖勋,张剑清.数字摄影测量学[M].2版.武汉:武汉大学出版社,2012.
Zhang Z X,Zhang J Q.Photogrammetry[M].2nd ed.Wuhan:Wuhan University Press,2012.
[8] 金鼎坚,支晓栋,王建超,等.面向地质灾害调查的无人机遥感影像处理软件比较[J].国土资源遥感,2016,28(1):183-189.doi:10.6046/gtzyyg.2016.01.27.
Jin D J,Zhi X D,Wang J C,et al.Comparison of UAV remote sensing image processing software for geological disasters monitoring[J].Remote Sensing for Land and Resources,2016,28(1):183-189.doi:10.6046/gtzyyg.2016.01.27.
[9] 赵云景,龚绪才,杜文俊,等.PhotoScan Pro软件在无人机应急航摄中的应用[J].国土资源遥感,2015,27(4):179-182.doi:10.6046/gtzyyg.2015.04.27.
Zhao Y J,Gong X C,Du W J,et al.UAV imagery data processing for emergency response based on PhotoScan Pro[J].Remote Sensing for Land and Resources,2015,27(4):179-182.doi:10.6046/gtzyyg.2015.04.27.
[10] Turner D,Lucieer A,Watson C.An automated technique for generating georectified mosaics from ultra-high resolution unmanned aerial vehicle(UAV) imagery,based on structure from motion(SFM) point clouds[J].Remote Sensing,2012,4(5):1392-1410.
[11] Hardin P J,Jensen R R.Small-scale unmanned aerial vehicles in environmental remote sensing:Challenges and opportunities[J].GIScience and Remote Sensing,2011,48(1):99-111.
[12] Pix4Dmapper软件数据处理操作手册[EB/OL].[2015].http://www.skyway-info.com/cn.
Operation manual for data processing of Pix4Dmapper software[EB/OL].[2015].http://www.skyway-info.com/cn.
[13] Jiang H B,Su Y Y,Jiao Q S,et al.Typical geologic disaster surveying in Wenchuan 8.0 earthquake zone using high resolution ground LiDAR and UAV remote sensing[C]//Lidar remote sensing for environmental monitoring,2014,9262:926219.
ApplicationofUAVlow-altituderemotesensing
WU Yongliang1,2,3, CHEN Jianping1,2, YAO Shupeng1,2, XU Bin1,2
(1.SchoolofEarthSciencesandResources,ChinaUniversityofGeosciences(Beijing),Beijing100083,China; 2.BeijingKeyLaboratoryofDevelopmentandResearchforLandResourcesInformation,Beijing100083,China; 3.ChinaAcademyofAerospaceStandardizationandProductAssurance,Beijing100071,China)
Unmanned aerial vehicle (UAV) low-altitude remote sensing is an extension and supplement of the traditional aerial photogrammetry, characterized by the airspace application convenience, short launch preparation time, and being less influenced by meteorological conditions, landing site restrictions and regional geological conditions. In order to promote the UAV low-altitude remote sensing technical application, the authors studied its key technologies. The function of UAV low-altitude remote sensing system and the factors considered in the design were analyzed, and the survey process was summarized. A complete technical route of UAV low-altitude remote sensing using in geological survey was formed. To prove the practicability of this technology method, the low-altitude UAV remote sensing system was built up for application in Zhoukoudian area. The results show that this means can provide timely and effective image for geological survey and emergence response survey, and has reference significance for low-altitude UAV remote sensing engineering application.
UAV remote sensing; aerial photography application; Zhoukoudian; Pix4Dmapper
10.6046/gtzyyg.2017.04.18
吴永亮,陈建平,姚书朋,等.无人机低空遥感技术应用[J].国土资源遥感,2017,29(4):120-125.(Wu Y L,Chen J P,Yao S P,et al.Application of UAV low-altitude remote sensing[J].Remote Sensing for Land and Resources,2017,29(4):120-125.)
TP 79
A
1001-070X(2017)04-0120-06
2016-05-09;
2016-07-12
国土资源部公益性行业科研专项项目“地质大数据技术研究与应用试点”(编号: 201511079-02)资助。
吴永亮(1987-),男,博士研究生,从事地球探测与信息技术、航天标准化研究。Email: andyloveti@163.com。
(责任编辑:李瑜)
