自主导航控制及惯性技术发展趋势
2017-12-20薛连莉王常虹杨孟兴杨功流陈效真
薛连莉,王常虹,杨孟兴,杨功流,陈效真
(1.北京海鹰科技情报研究所,北京100074;2.哈尔滨工业大学,哈尔滨150001;3.中国航天科技集团第十六研究所,西安710100;4.北京航空航天大学,北京100191;5.北京航天控制仪器研究所,北京100039)
自主导航控制及惯性技术发展趋势
薛连莉1,王常虹2,杨孟兴3,杨功流4,陈效真5
(1.北京海鹰科技情报研究所,北京100074;2.哈尔滨工业大学,哈尔滨150001;3.中国航天科技集团第十六研究所,西安710100;4.北京航空航天大学,北京100191;5.北京航天控制仪器研究所,北京100039)
从协同化、体系化、一体化适应未来战争的信息化,跨域化、高速化、多用化适应未来战争的立体多维化,自主化、平台化、小型化适应未来战争的无人智能化3个方面概述了未来战略新常态下武器装备对自主导航控制的需求,进而对自主导航控制这一概念进行了简要概述。从精确打击入手,阐述了惯性技术对自主导航的重要性,提出惯性技术是自主导航控制的核心。最后,从惯性器件、惯性传感技术、惯性测试、新功能材料、新兴算法和软件技术等方面分析总结了惯性技术的发展趋势,并对我国惯性技术的发展提出了一些建议。
太空探测;空间防卫;导弹武器;智能感知;智慧控制;惯性技术
0 引言
随着高新技术的发展和进步,赛博概念从防御转为进攻,美国国防部2014年11月发布 《国防创新倡议备忘录》,还提出了 “第三次抵消战略”的概念和基本构架,制定了以高超声速、自主化为方向,颠覆性技术为核心的 《长期研究和发展计划》。2016年12月,美国又对 《国防部太空政策》进一步修订,并发布了 《建设太空任务部队,训练明日的太空战士》白皮书,明确了太空政策的4大目标,阐明了实施太空威慑、提升太空任务有效性的4项措施,指明了太空力量与其他军事力量共同实施太空威慑、协同作战的途径,从应对冲突的角度提出了确保太空任务有效性的3个等级。新兴 “自主协同”“太空备战”和“太空控制”倾向昭然若揭。俄罗斯2015年发布的 《2020年前俄罗斯国家安全战略》也表明,俄罗斯将加速发展高超声速飞行器、采用创新技术的核弹头和空天防御体系,明确 “信息技术已成为推动国家经济快速发展和构建信息社会的重要因素,越来越多地被用来达成地域政治、军事和战略稳定等目的”,“信息安全体系已成为国家安全保障体系的重要组成部分”。
由此,“强大对手、高端冲突”“全球公域介入与机动联合”“跨域作战、空天融合、全域融合”“大纵深、深尺度”“一弹多能、一弹多用”“齐射竞争”等新的战事概念不断涌现。未来隐形战略新常态和太空竞争新趋势即见端倪,空间探测、空间竞争和空间安全升温,多维跨域立体交叉高端冲突、无人智能多信息融合和多模式能量对抗的新型战略战役模式逐渐形成。世界各国必将对未来国防武器装备应对网络化战场条件下的“智能精准化、一体协同化、小型体系化”以及“远程跨域、自主作战”形成新的 “跨域式”期望,其中自主导航控制及其核心惯性技术也就成为未来发展的关键。
1 自主导航控制是未来战略新常态下武器装备的新需求
21世纪以来,随着新兴计算科学的形成,信息网络、物联网+、云计算、大数据、微光电子、微纳系统等技术的深化、融合和集成,又孕育着新一轮生命科学、脑科学、仿生工程、量子、超材料、无人智能、机器人等技术的创新,有力地推动了 “多维跨界域立体交叉高端冲突、无人智能多信息融合和多模式能量对抗”的新型战略战役模式的形成。未来战场空间无疑向无边界扩大,向空天融合、大纵深、深尺度方向发展,武器装备的飞行速度、飞行域、打击域也相应拓展,而这又再次推动武器装备向高超声速、自主智能、多平台协同以及精准化方向跨越发展。大数据是智能的基础,而云计算则是智能的实现手段。尽管政治军事目的不同、作战使命不同、武器装备的基础也不同,但国防前沿技术与颠覆性技术发展迅猛的趋势是一致的,对于新兴武器装备适应新兴战略全球化模式的牵引和推动也是一致的。
1.1 协同化、体系化、一体化适应未来战争的信息化
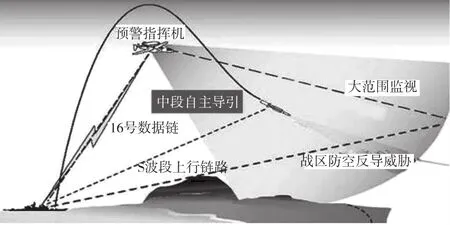
图1 美国 “标准”6依靠预警机提供信息进行超视距拦截Fig.1 The U.S standard 6 over-the-horizon intercept function with early warning aircraft
1.2 跨域化、高速化、多用化适应未来战争的立体多维化
由于空空导弹、飞航导弹武器需要打击空、天、地等不同区中的各种高超或超声速飞行目标,因此,各种战略/战术高超声速常规导弹是美俄发展的重点技术。如美国的助推滑翔高超声速导弹“先进高超声速武器”(AHW),号称是 “一小时能打击世界各地”的反介入/区域作战利器。其典型的多用导弹,不仅能拦截各种战机,而且可直接打击巡航导弹、近程弹道导弹和水面舰艇,满足大范围控制和超远程作战需求;俄罗斯也加速开展高超声速武器系统的研发,以应对未来复杂战场下的多元目标威胁。
1.3 自主化、平台化、小型化适应未来战争的无人智能化
近年来,美国国防部预先研究计划局(DARPA)正在开展大量无人自主系统核心通用技术和基础性技术研究,相关项目包括“自主机器人操作”(ARM)、“快速轻量自主”(FLA)和 “感知开发与执行中的数字”(MSEE)等。其中,FLA项目第一阶段已于2017年6月结束。此外,美国还出台了一系列无人系统技术发展规划,包括《自主地平线》《无人系统自主技术路线图》《美国地面无人系统路线图》《美国机器人技术路线图》等。根据这些文件可预测,到2020年将完成先进自主技术的两个阶段;2025年将为地面无人系统提供脑机接口和全自主组件,实现自主操作和有人/无人编队作战;2035年无人自主系统技术成熟,实现全自主和协同作战能力。而平台化的武器系统包括在联合空地防区外导弹(JASSM)基础上发展起来的空射、舰射、潜射远程反舰导弹(LRASM)。对于这些自主化、平台化的作战平台,无人智能、小型化是基础。
可见,美国 “第三次抵消战略”的宗旨就是依托颠覆性技术,快速形成新的作战能力,重构非对称优势,维持其未来绝对军事地位。各发达国家也顺应信息化高新技术发展,循序渐进地应用高科技开展颠覆创新,提升自身武器装备的智能化、数字化、精准协同,保持维护自我战略安全地位优势,适应未来战略新常态,而自主导航智能控制则是未来战略新常态下武器装备的核心。
2 惯性技术是自主导航控制的核心敏感源
导航控制指的是使载体安全顺利到达目的地的过程,主要是精准确定载体位置和姿态。对武器装备而言,自主导航控制是一项能根据目标自主识别决策、甄别规避、优选规划、实时补偿修正、执行控制,实现精确打击的导航控制技术,也就是能实时自主敏感识别载体位置和姿态,控制载体精准运动、准确命中目标。自主导航控制包括自我环境智能感知、定位导航、路径规划、智能决策自动控制等,其中自我环境智能感知包括多传感器多信息数据动态提取和位置姿态确定,定位导航需要局部数据、全局数据、整合判断决策以及辅助协调执行,路径规划包含算法模型、动态甄别比对和判定适时规划过程,智能决策自动控制则需要反馈、比对、多信息融合和伺服控制,如图2所示。自主导航控制决定了导弹武器装备在复杂作战环境下快速机动、安全自主对多目标实施精确打击的能力,是人类逐步移交操控权、提高安全系数的工程,是从被动安全到主动安全再到预防安全控制,从辅助到共同到无人导航制导授权、适应外界环境的颠覆性技术,是人类文明和高科技进步的标志和必然趋势。
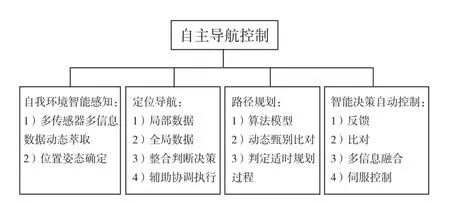
图2 自主导航控制组成Fig.2 Composition of autonomous navigation and control
因此,为适应未来高新技术条件下的对抗,确保战略、战术导弹作战能力的有效性,导弹武器装备必须具备智能自主、协同齐射、突防可靠、抗干扰和机动生存等能力,增强威慑、战役作战防御、射前生存、高效突防和精确打击能力,保持目标毁伤能力,使弹头向小型、机动化方向发展。武器装备不仅能突破战区导弹防御系统(TMD)、国家导弹防御系统(NMD)的防御,还能在战役的浅纵深区域内确保制空权、制海权,实现武器装备信息化、信息装备武器化、信息系统一体化、作战体系协同化和基础设施实用化。所以,智能精确制导装备是实现武器装备信息化的关键,也是迅速提升我国武器装备机动快速、精确可靠、有效杀伤的关键,如图3所示。

图3 自主导航控制示意图Fig.3 Diagram of autonomous navigation and control
导弹要发挥威力,一是要速度快射程远,二是要杀伤威力大,三是要协同命中精度高。要达到快和远,导弹发动机推力就要大,效率就要高,燃料也得多。杀伤威力大,就要多弹药和大当量。而要打得准,首先,射前高精度快速瞄准,发射平台一旦就位,就要给出发射点精确地理位置坐标和方位基准,根据打击目标解算出弹道参数送入制导计算机进行惯性基准对准发射;其次,就是惯性制导系统在导弹发射和飞行(主动段、中段、末段)全过程中进行精确的测量控制以及弹药分导的动基准对准转换传递对准。由此可见,命中精度最终取决于惯性(或惯性基复合制导)制导系统的精确制导。
目前,陀螺仪能实现导弹外输入航向基准瞄准,但瞄准专用车辆和设备,则受环境因素制约较大,不适于快速机动。因此,导弹机动快速自对准技术成为精确打击关键技术之一。惯性导航系统(INS)的完全自主性、高隐蔽性、强抗干扰性和信息连续性特点决定了其在精确打击中的地位,尤其是捷联惯性导航系统(SINS)具有体积小、成本低、结构简单、可靠性高、可维护性强等优点,使其能有效提高导弹及弹药分导的自主性和战术机动性,可实现全方位攻击多目标要求。美军1984年前使用的全部为平台式惯性导航系统(PINS),到 1989年 SINS应用占 50%,1994年SINS的应用更是达到了90%。因此,以惯性导航为主的组合导航,成为精确打击的关键技术之二。惯性系统的精度取决于惯性器件的性能,它集光、机、电等多学科高新技术为一体,属国防尖端技术中的关键支撑技术,受到世界各发达国家高度重视,在精确打击中占有极其重要地位,是精确打击的关键技术之三。还有多平台协同齐射、环境因子模型补偿和符实性测试试验软硬件技术,皆为精准打击的关键要素。可见,作为自主导航控制的核心敏感源,惯性技术发挥了重要的作用,以惯性传感器为主的惯性技术已成为国防核心高技术。
3 惯性技术的发展趋势
惯性技术已历经百余年发展历程,在这百年发展历程中,以陀螺仪表技术为标志的重大创造性历史事件,决定着惯性技术的过去和未来,而惯性技术的发展又左右着战略新常态的未来。惯性技术产品包括陀螺仪、加速度计等惯性仪表及其所构成的各类系统,以及相应的测试试验、制造技术,如图4所示。由于惯性技术具有自主隐蔽、实时连续、全天候、全时空、全地域环境敏感等特点,已成为天基、空基、海基和陆基武器装备导航定位、制导控制、瞄准定向及姿态稳定的通用核心装备,是一个国家国防实力的核心标志之一,如图5所示。随着武器装备自主长航时需求的牵引,电子、光学、新兴计算和软件技术的发展成为现代高新武器装备、多种国民经济领域的精确敏感、轻量自主、智能保持、自动控制、小型低成本的保障。总体说来,惯性技术有以下几个发展趋势:
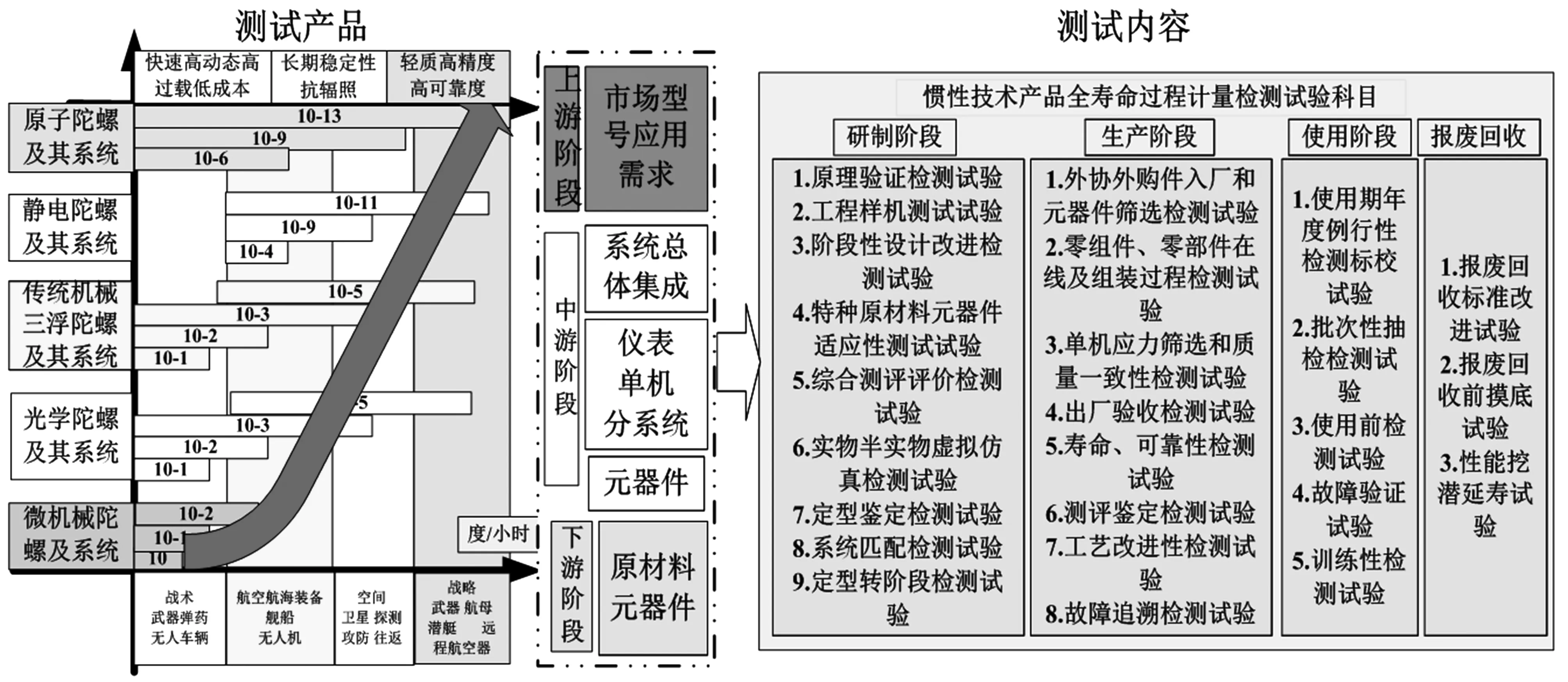
图4 惯性测试产品及其测试内容Fig.4 Inertial products and their test content

图5 惯性技术的应用领域Fig.5 Application of inertial technology
1)新兴原子自旋陀螺、核磁共振陀螺、干涉(原理样机)陀螺、晶体光学陀螺和高端惯性传感技术已见高精度应用端倪。此外,由于MEMS技术是原子惯性系统及其有效应用(高精度、高动态有机融合)的基础支撑技术,且一代技术一代市场,因此不可轻视。如美国Micro-PNT项目研发的新型微型核磁共振陀螺仪,如图6所示。
2)新兴光学惯性传感技术以其成本寿命、精度可靠性优势已具备取代传统机械惯性陀螺传感技术倾向,采用三轴旋转调制可有效减小常值误差,提高光学捷联惯性系统应用精度。但高精度机械(三浮陀螺、静电超导陀螺)惯性仪表依然在战略和特种需求目标任务中独树一帜,不能偏废,依然需要从高精度长期稳定基础微观量化深入综合挖潜。采用三轴旋转调制和电锁紧,实现不同任务剖面平台捷联混合导航制导以提高应用性能。也有人提出应用数字调制代替物理调制,在提高捷联组合精度的同时缩小体积、简化结构、提高应用的可靠性。

图6 Micro-PNT项目研发的新型微型核磁共振陀螺仪Fig.6 A new type of micro-nuclear magnetic resonance gyroscope by Micro-PNT project
3)MEMS固体振动陀螺挑战高精度极限和高端应用,成为未来高端MEMS惯性传感器发展趋势。多源复合、多元阵列式惯性微系统对实现不依赖GPS的自主导航、降低成本、提高精度更胜一筹,也将解决战术制导 “动态、过载、精度、成本、国产化”5要素,大大推动战术武器制导智能化的进程。但是,纯惯导性能和精度的提高依然是惯性技术发展进步的首要任务。而以惯性陀螺为基础的多传感器(天文、卫星、磁、无线电等)组合、多信息模块深度冗余融合,以及低成本中低精度多陀螺阵列组合应用,是低成本提高导航控制精度和适应多目标任务应用的不二选择,也是未来多途径实现不依赖GPS自主导航的重要举措。
4)新功能材料的产生、新兴精密超精密制造的发展、人机智能微应力的集成以及微观量化标准规范,推动了高精度高可靠长寿命、快速反应、小型轻质低成本、大动态抗高过载、适应多元复杂苛刻环境的惯性传感器不断进步发展,从而满足智慧导航控制的需求。其中,精密超精密工匠制造依然是惯性技术提高之本。铍及新兴复合轻质材料(石墨烯复合)的应用、微观量化标准规范则是惯性技术产品制造的方向性基础和核心,微观量化标准如图7所示。
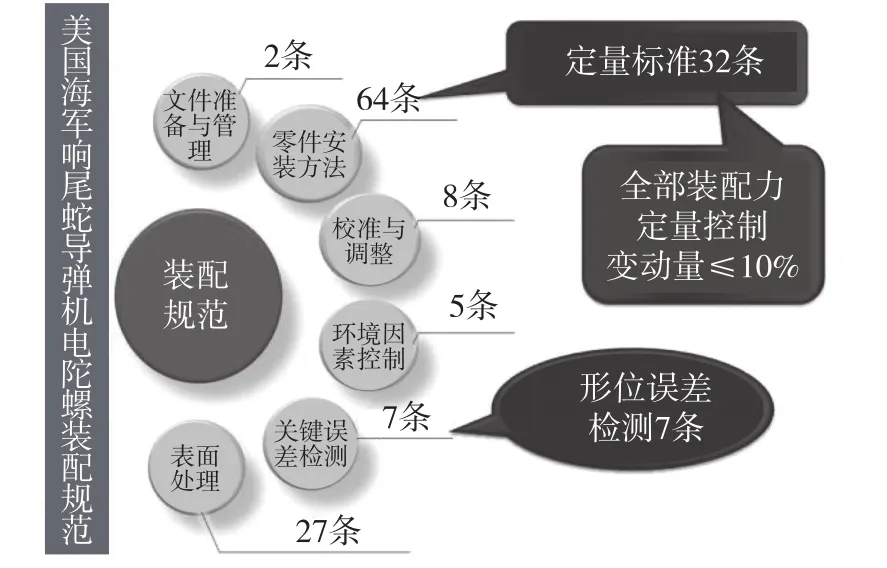
图7 微观量化标准Fig.7 Micro-quantitative standard
5)动态、过载、电磁、温度等极端条件和多要素复合模拟仿真、综合激励测试试验,交付评估,是科学揭示惯性传感器物理结构体真实性能、特点和实用性能行为,揭示结构体工程应用适应性能指标、发现完善提升结构体固有不足的有效途径。高容量并行激励测试技术提升了惯性技术的在线测量和智能化产能。复合场效应和极端条件(强磁、强电、强过载、强辐照)试验研究和考核,在适应未来惯性技术产品对抗环境需求方面尤显不足,不能适应惯性技术应用需求。加强试验理论、机理、方法、设备技术研究已成制约惯性技术发展的瓶颈和亟待解决的问题。
6)新兴计算/算法及其软件技术、大数据网络及应用已成为促进惯性传感技术产品全寿命周期测试试验、储存应用、报废回收,数据集成应用、预警判督与健康管理、协同融合、改进设计、变革思维的关键颠覆性技术。如在美国国防部试验资源管理中心(TRMC)的推动下,通过大数据分析软硬件支撑联合攻击机作战试验,识别大量有效信息,节约开支100万美元。
7)除传统天文、卫星、无线电、里程计、地磁、高度表等辅助导航外,充分耦合系统周围蜂窝网、无线电、Wi-Fi和卫星等多种机会信号(SoO),将提取的信号作为惯导信号进行辅助。在展开环境机会信号理论分析研究的基础上,形成提取相关授时和定位信息应用专用软件定义无线电台和实用导航算法,形成有效的鲁棒远距离参考信号,提升导航定位的自主性和长期稳定可靠性,加大惯性系统的算法研究,尤其是动态误差的识别及实时补偿,积极拓展惯性系统自主智能和协同执行功能。
4 对我国惯性技术发展的思考
60多年来,我国惯性技术从无到有,从弱到强,从落后到先进,经历了创业、发展、创新3个阶段,已具备研制生产高、中、低精度不同惯性仪表及系统的能力和条件。陀螺从气浮、挠性、液浮、静压液浮、三浮、静电到激光、光纤、微机电到原子陀螺。惯性系统从平台式到捷联式,从单一自主惯性系统到惯性/多信息融合导航系统,性能越来越好,体积越来越小,应用范围越来越广,基本满足了我国的导弹、卫星、飞船、飞机、舰艇、陆用车辆等对惯性仪表与系统的需求。但目前的发展与以信息化为主体的21世纪迅猛发展的高科技进步不相适应,与国际发达国家以及国防装备需求还有差距。因此,必须面对现实、总结展望,抓住机遇,快速推动我国惯性技术的发展。
惯性技术产品作为敏感源,在其全寿命周期产业链中,采购营销交易准入、研究设计试验生产、智能检测监督、集成组合应用、维修维护年检、储存包装运输、安全服务回收、数据采集评估的整个产业链,涵盖了惯性技术产品在多个应用领域的计量需求。其中,宏观物象微观量化归咎、通用尺度的精密超精密极致量化判督、四维空间真值方位量化找准传递、多物理场微应力应变效应的量化探究、微小角速率和微重力的灵敏量化感知、高动态大过载复杂环境下的微观量化传输、新概念新原理技术的量化分离识别、特种专用功能结构材料的量化核验成为惯性技术产业链中的8项关键技术,支撑惯性技术的科学研究,推动惯性技术的工程应用。攻克解决这8项关键技术的量化参数确定,就会使惯性技术产生新的革命性进步,掌握8项关键技术量化参数的测量试验,就掌握了本领域检定、校准、检测的符实技术。因此,重视专业基础研究要 “细”(微观参数量化、关系映射因子、定量表征)、重视学科引领人才培养要 “严”(学科带头人、专业带头人、工匠带头人、筹划带头人)、重视惯性应用技术拓展要 “慎”(智能、协同、兼容、替代)、重视测试试验技术研究要 “实”(理论、机理、方法、设备)、重视新兴计算技术研究要 “深”(计算、软件、大数据应用)。军民融合和信息计算科学的信息网络大数据使惯性技术产业迅猛发展,成为最具综合性、交叉性的现代化工程技术学科之一。在改革进取推进大国强国梦复兴的今天,还要把握好需求牵引技术推动、尖端对标借力提升、形象合一、多学科融合、软件计算数据应用、得舍衡谊颠覆创新的同时,重视机制体制政策策略的适应性改革应用。
5 结论
在未来战略新常态的需求牵引和新兴高科技迅猛发展的推动下,惯性传感技术正在孕育新一轮的科技革命和产业变革。战略高精度惯性技术产品涉及当今最基础和最前沿的多学科领域技术创新和成果转化,发挥着日益重要的源头支撑作用。而提高惯性技术的研发水平,切实加快惯性敏感器的研发,进而发展自主导航、制导与控制技术,就是 “知周而智实现金戈铁马智慧装备,智致而圆铸就虎踞龙盘数字国防”“建设同我国国际地位相称、同国家安全和发展利益相适应的巩固国防和强大军队”,加快由国防大国向国防强国迈进,适应国际不测和未来战争新模式的科学应对步伐。
[1]GOV.UK.The defense innovation initiative memorandum[EB/OL]. http: //archive.defense.gov/pubs/OSD013411-14.pdf,2014-11-15.
[2]张洋.第三次 “抵消战略”中的技术引入与创新[J].军事文摘,2016(13): 14-16.ZHANG Yang.Technology introduction and innovation in the third “offsetting strategy” [J].Military Digest,2016(13): 14-16.
[3]张虓.美国国防情报战略的现状及走向[J].情报杂志,2016,35(6): 9-12.ZHANG Xiao.The status quo and trend of US defense intelligence strategy[J].Journal of Information,2016,35(6): 9-12.
[4]赵煦.走向智能自主的无人机控制技术[J].科技导报,2017,35(7): 1.ZHAO Xu.Intelligent autonomous unmanned aerial vehicle control technology[J].Science& Technology Review,2017,35(7): 1.
[5]James A W,Frank K.Unmanned systems integrated roadmap FY2011-2036[EB/OL].http: //www.doc88.com /p-498984491964.html,2010-10.
[6]Harrison G J.Unmanned aircraft systems(UAS): manufacturing trends[EB/OL].https: //fas.org/sgp/crs/natsec/R429 38.pdf,2013-01-30.
[7]NASA.NASA technology roadmaps TA4:robotics and autonomous systems[EB/OL].https: //www.nasa.gov/sites/default/files/atoms/files/2015 _ nasa _ technology_ roadmaps_ ta_ 4_ robotics_ and_ autonomous_systems_ final.pdf,2015-05.
[8]Kazior T,Lee D.Future autonomous systems overview[EB/OL]. http: //cra.org/ccc/wp-content/ uploads/sites/2/2016/08/Autonomous-Systems-WG-Overview-final.pdf,2016-08-31.
[9]王晓军.新版 《俄罗斯联邦国家安全战略》解读[J].现代军事,2016(2): 47-55.WANG Xiao-jun.An interpretation of the new edition of the Russian federation's national security strategy[J].Conmilit,2016(2): 47-55.
[10]张绍芳,宋怡然.欧洲飞航导弹武器研制生产能力探析[J]. 战术导弹技术,2016(4): 8-14.ZHANG Shao-fang,SONG Yi-ran.Study of European aerodynamic missile development and production ability[J].Tactical Missile Technology,2016(4): 8-14.
[11]宋怡然,王雅琳,朱爱平,等.2016年国外飞航导弹武器与技术发展综述[J].飞航导弹,2017(3):7-11.SONG Yi-ran,WANG Ya-lin,ZHU Ai-ping,et al.Development of foreign aerodynamic missile and technology in 2016[J].Aerodynamic Missile Journal,2017(3): 7-11.
[12]谭诗利,王洁,王鹏飞,等.高超声速飞行器巡航段导航综述[J]. 飞航导弹,2016(2): 28-33.TAN Shi-li,WANG Jie,WANG Peng-fei,et al.Review of navigation of cruise section of hypersonic vehicle[J].Aerodynamic Missile Journal,2016(2): 28-33.
[13]梁洪峰,褚鹏蛟,王永芳,等.通过全球专利分析看深空探测自主导航与控制技术发展[J].导航与控制,2017,16(3): 91-96.LIANG Hong-feng,CHU Peng-jiao,WANG Yong-fang,et al.Research on patent analysis of autonomous navigation and control technology for deep space exploration[J].Navigation and Control,2017,16(3): 91-96.
[14]薛连莉,陈少春,陈效真.2016年国外惯性技术发展与回顾[J].导航与控制,2017,16(3):105-112+84.XUE Lian-li,CHEN Shao-chun,CHEN Xiao-zhen.Development and review of foreign inertial technology in 2016[J].Navigation and Control,2017,16(3): 105-112+84.
[15]李伟忠,孙鹏.战术导弹用MEMS陀螺仪研制进展及关键技术[J]. 导航与控制,2017,16(3):97-104.LI Wei-zhong,SUN Peng.Research on progress and the key technology of MEMS gyroscope in tactical missile[J].Navigation and Control,2017,16(3): 97-104.
[16]AFRL.All source positioning and navigation (ASPN)phase 2[EB/OL].https: //www.fbo.gov/index? s =opportunity&mode= form&id= 3fbaf7f56cc073f9ff01d8 a50d9d2138&tab=core&_ cview=1.
[17]AFRL.All source positioning and navigation(ASPN).[EB/OL].https: //govtribe.com/project/all-sourcepositioning-and-navigation-aspn.
[18]Kawaguchi A,Inaishi M,Kondo H,et al.Towards the development of intelligent navigation support systems for group shipping and global marine traffic control[J].Iet Intelligent Transport Systems,2009,3(3): 257-267.
[19]Andert F,Ammann N,Krause S,et al.Optical-aided aircraft navigation using decoupled visual SLAM with range sensor sugmentation[J].Journal of Intelligent&Robotic Systems,2017: 1-19.
Future Trends in Autonomous Navigation,Control and Inertial Technology
XUE Lian-li1,WANG Chang-hong2,YANG Meng-xing3,YANG Gong-liu4,CHEN Xiao-zhen5
(1.Beijing HIWING Scientific and Technology Information Institute,Beijing 100074;2.Harbin Institute of Technology,Harbin 150001;3.The 16thInstitute,China Aerospace Science and Technology Corporation,Xi'an 710100;4.Beihang University,Beijing 100191; 5.Beijing Institute of Aerospace Control Devices,Beijing 100039)
This essay focus expounded on the demands for autonomous navigation and control of weapons and equipments in future strategic new normal,since synergy,systematization and integration are demands of informatization in the future war,cross-domain,high-speed and multi-purpose are demands of multi-dimensional in the future war,autonomy,platform and miniaturization are demands of intelligent.Then a brief introduction of the concept of autonomous navigation and control is given.The importance of inertial technology to autonomous navigation is elaborated from the aspect of precision strike,puts forward that inertial technology is the core of autonomous navigation and control.Finally,the trends of inertial technology are analyzed and summarized from the aspects of inertial sensor,inertial sensing technology,inertial test,new function material,emerging algorithm and software technology.Some suggestions are put forward for the development of inertial technology in China.
space exploration; space defense; missile armament; intellisense; autonomous control; inertial technology
U666.11
A
1674-5558(2017)07-01455
10.3969/j.issn.1674-5558.2017.06.015
2017-08-08
薛连莉,女,硕士,航空宇航科学与技术专业,助理工程师,研究方向为导航、制导与控制。
