高端MEMS固体波动陀螺的发展与应用
2017-12-20权海洋杨栓虎陈效真
权海洋,杨栓虎,陈效真,王 浩
(1.北京微电子技术研究所,北京100076;2.兵器工业集团203研究所,西安710065;3.北京航天控制仪器研究所,北京100039)
高端MEMS固体波动陀螺的发展与应用
权海洋1,杨栓虎2,陈效真3,王 浩1
(1.北京微电子技术研究所,北京100076;2.兵器工业集团203研究所,西安710065;3.北京航天控制仪器研究所,北京100039)
总结了固体波动陀螺的发展历程,分析了从固体波动陀螺到MEMS陀螺的演化过程。通过对MEMS谐振环陀螺的演化与研制历程进行分析,预测未来高端MEMS陀螺发展方向,推动我国高端MEMS环形固体波动陀螺的研究与应用。
MEMS谐振环陀螺;固体波动陀螺;谐振盘DRG陀螺
0 引言
1890年,物理学家Bryan发现挠性半球可测量转动的Bryan理论。1988年,美国加州大学伯克利分校Muller研究小组发明了转子直径为60μm~100μm的硅静电电机。至此,MEMS陀螺就以体积小、质量小、功耗低、适于批量化生产,而受到各发达国家的重视。旋转振动结构、旋转盘结构、振动盘结构、线振动结构、正交线振动结构(振动平板结构、振动梁结构、振动音叉结构和加速度计振动结构)和非正交线振动结构(薄壁半球共振、共振圆柱结构和共振环结构)MEMS陀螺相继出现。据国外研究者分析,按MEMS陀螺不同的工作原理、技术方案、加工工艺的可能组合选择方案有2000种以上。同时,随着系统技术的进步和工艺水平的提高,也给MEMS惯性技术的发展带来了新的机遇,MEMS惯性仪表的性能在很短的几十年内得到了迅速的提高,并不同程度得到广泛应用。其中,消费用MEMS陀螺大多采用传统的音叉结构,无法满足高精度、特殊环境下的应用需求。
国外,军用高端MEMS陀螺技术路线和商用MEMS陀螺技术路线完全不同,军用高端MEMS陀螺技术路线基本都是采用环境适应性好的全对称结构。美国DARPA micro-PNT项目重点支持多环谐振盘DRG陀螺和微半球陀螺VRG的研制,取得很好结果。2015年,DARPA新启动的高级惯性微传感器(AIMS)项目,强调只支持结构上全对称的二维或三维的CVG-II型陀螺研制。英国BAE公司在20世纪90年代开始谐振环陀螺研制,产品已批量用于APKWS制导炸弹、NLAW反装甲武器以及155mm雷神制导炮弹和卫星等。相对于目前调谐音叉式、平板振动式、壳体振动式等MEMS陀螺技术,它具有高精度、高动态范围、抗过载能力强,能直接测量转动角度,避免了后续积分电路或算法带来的动态误差以及角度和角速率模式之间的切换,便于批量生产等独特优势,成为未来多种中高精度武器载体平台,尤其是高动态旋转制导炮弹及火箭弹用惯性导航系统的有效技术。
先进国家始终未停止对高性能环形全对称结构MEMS惯性器件的研制步伐,已在实战中经过检验,实现了以全对称环形固体波动陀螺的 “中高精度、低成本、高可靠、大批量、中端军用”的应用设想。而且,新一代高精度硅微半球和全对称环形固体波动陀螺及其多陀螺阵列集成技术正在兴起。
近20多年来,国内经过摸底了解、试验认知、仿制自制、研究试用等大量研究探索,无论是理论(微运动学、微动力学、微静电学等研究)、材料(硅、石英、记忆合金、压电和薄膜材料制备与特性等研究),还是工艺(面硅、体硅、LIGA工艺、微机械制造、放电加工、化学三维成型等),基本完成了硅微惯性仪表基础研究过程,解决了硅微惯性器件从 “能动”到 “能用”的过渡。但是,国内MEMS陀螺研制大多以商用音叉结构为主,一直无法满足装备需求。全对称结构的半球、钟形、杯形固体波动陀螺技术同样起步于20世纪80年代,已卓有成效;高端MEMS环形固体波动陀螺的研究更晚于21世纪初。目前,全集成MEMS环形固体波动陀螺的工程产品研究及应用摸底(8000G)已显现出国产化优势。可见,开展具有自主知识产权的全对称环形结构MEMS陀螺研制同样是解决我国高端武器装备应用的有效途径。
1 固体波动陀螺到MEMS陀螺的发展历程
1.1 固体波动理论与哥氏力陀螺
固体波动陀螺经历了金属半球谐振陀螺、石英半球谐振陀螺的研制与升级,又演化为基于MEMS工艺的三维、二维谐振陀螺。最终,确立了高端MEMS谐振陀螺的发展方向与技术路线。
固体波动陀螺的基本原理是:旋转轴对称物体(谐振子)中被激励的驻波转动角与输入角速率在其对称轴上的投影成一定比例。该原理利用了旋转轴对称物体中弹性波惯性效应,即驻波进动特性。
如图1所示,质量块P固连在旋转坐标系的xoy平面,若沿x轴方向以相对旋转坐标系的速度v运动,旋转坐标系绕z轴以角速度ω旋转。在质量块P上哥氏效应产生的哥氏力为:Fcor=2m(v×ω)。其中,m为质量块P的质量。
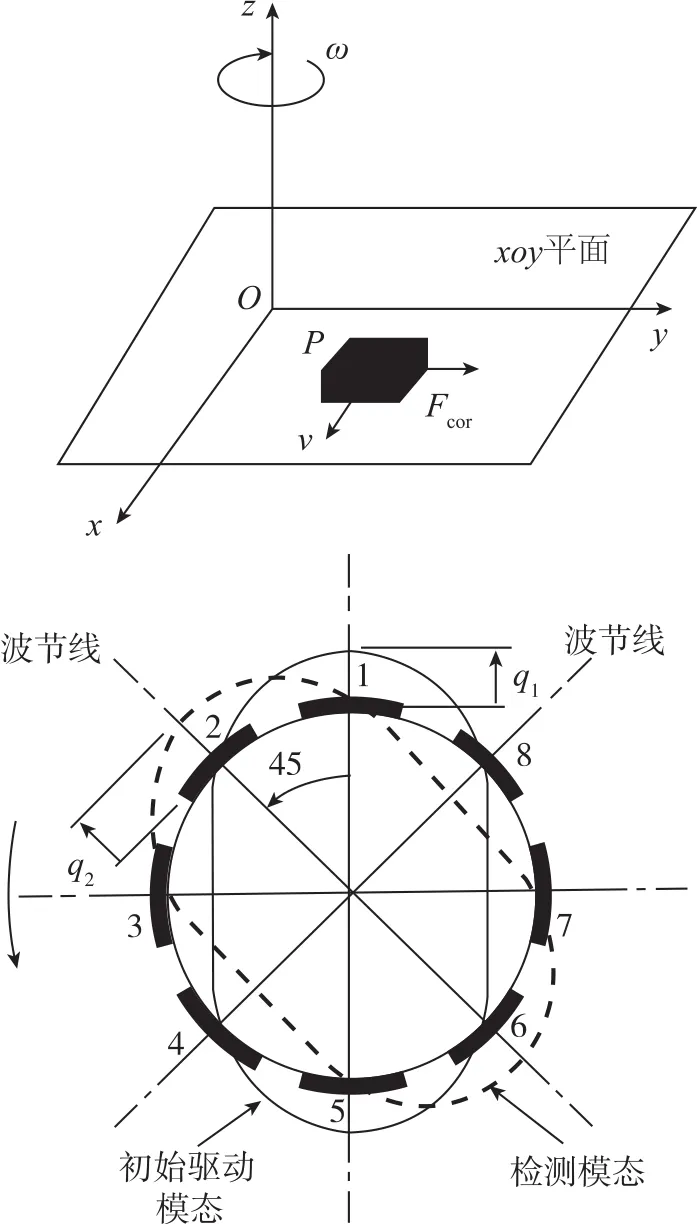
图1 振动式陀螺工作原理Fig.1 Operational principle of vibrating gyroscope
可见,哥氏力Fcor与质量块P上的输入角速度ω成正比,并引起质量块在y轴方向产生的位移(输入角速度的信息)。振动陀螺的振动部件受驱动而在第一振动模态(又称驱动模态,如图1质量块P沿x轴运动),当与第一振动模态垂直的方向有旋转角速度输入时(如图1沿z轴的旋转角速度),振动部件因哥氏效应产生了一个垂直第一振动模态的第二振动模态(又称敏感模态,如图1质量块P沿y轴产生的位移),该模态直接与旋转角速度成正比。各类不同结构形式的振动陀螺实际上都运用了同样原理。
谐振环式陀螺由振环、支撑梁及驱动、检测控制电极组成,基于对称性的考虑需要至少8个弹簧梁使结构平衡,并有2个相同自然频率的弯曲模态,如图2所示。在静电力(或电磁力)驱动下,谐振环在一个平面内以固定幅值、椭圆形进行1阶弯曲模态振动。当它围绕法线轴旋转时,哥氏力将使振动能量转移到相位差45°的2阶检测振动模态,2阶检测振动模态的振动幅值与输入角速率成比例,并可以用电容的变化来检测。
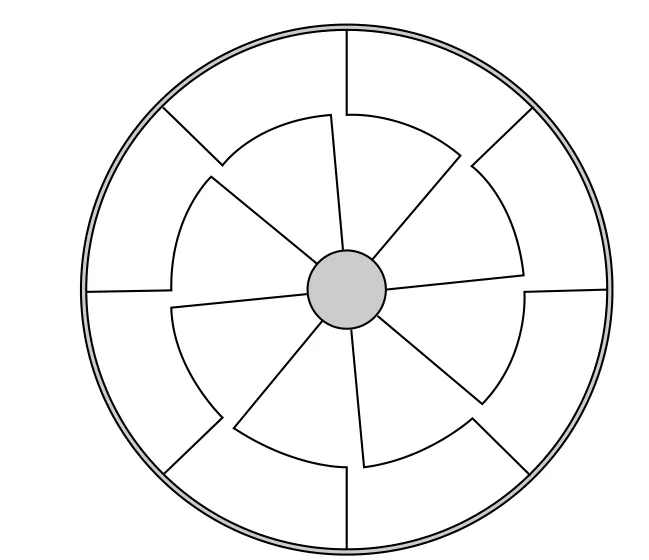
图2 谐振环结构陀螺Fig.2 Ring vibrating gyroscope
1.2 从半球谐振陀螺到MEMS平面陀螺的演化
半球谐振陀螺是固体波动陀螺的具体实现形式。1965年,David完成全对称半球谐振陀螺(HRG)的理论建模分析。1975年,美国Delco公司研制出世界上第一个半球谐振陀螺,精度达到50(°)/h;后来采用高Q值石英材料,1980年精度达到 1(°)/h。 1996年,Litton收购 Delco公司为美国哈勃望远镜计划研制高性能石英半球谐振陀螺,具体指标如下:量程为0.5(°)/s,零偏稳定性为0.00008(°)/h,角度随机游走为
2000年、2009年、2011年,Kristiansen和Shatalov以及任顺清等分别建立了圆柱形谐振陀螺和半球谐振陀螺的等效方程,从而利用簿壳力学中的能量原理给出了两种结构振动陀螺的动力学方程,为圆柱形谐振陀螺和半球谐振陀螺的研究发展做出巨大贡献。
2000年,Litton被Northrop Grumman收购,该公司研制500多个HRG陀螺分别用于美国金星探测和彗星撞击等重大宇航任务。研究表明,半球谐振陀螺在性能上几乎没有物理限制,发展潜力很大。但半球谐振陀螺是三维结构,加工工艺复杂,制造难度大,无法实现低成本批量化生产。在发展过程中有多种结构变化,衍生出多种二维结构,如图3所示。这些二维结构非常适合目前的MEMS制造工艺,可实现低成本批量化生产。

图3 半球谐振陀螺的发展与衍变Fig.3 Developing and evolution progress of HRG
图 3(a)的谐振环陀螺(Vibrating Ring Gyroscope,VRG)是半球陀螺的一种简化形式。英国Goodrich公司BAE公司(Atlantic Inertia System AIS分公司)从早期的金属筒型结构VSG-1起,始终致力于环形陀螺的研究,自20世纪90年代开始谐振环陀螺的研制,逐渐演进至新的压电材料环形陀螺VSG-5。其历代货架产品CRS03、CRG20、CRM100/200等系列产品占据世界中高端MEMS陀螺市场很大份额,并应用于英、美、瑞典、土耳其等国的制导弹药武器。目前已研制到第四代,最新产品陀螺零偏稳定性已达到 0.1(°)/h。
美国多所大学也开展了新型全对称结构陀螺的研究。2000年,Michigan大学Ayazi博士完成世界上第一款MEMS全对称环形陀螺,陀螺零偏稳定性达到 5(°)/h。 2008年,Zaman博士进行谐振星型结构改进,陀螺零偏稳定性已达到2.5(°)/h。图3(c)为Berkeley等几所学校联合研制的DRG谐振陀螺,直径为0.6mm、厚度为20μm,样品精度达到 3.27(°)/h。 图 3(f)是 Michigan 大学研发的多筒谐振(Multi-ring Cylinder)速率积分陀螺,谐振频率为3kHz,Q值为 72000,零偏为 129(°)/h,角度随机游走系数达到0.09(°)/h。
2 国内外军用MEMS谐振陀螺研制现状
2.1 半球谐振陀螺(HRG)研制现状
1996年,美国首次在空间应用HRG姿态敏感单元,约125套累计飞行2×107h。俄罗斯、法国等国发展迅速,均取得了良好应用效果。HRG被国际惯性界认为是21世纪广泛用于各类运载器捷联系统中最理想的器件,国外HRG对比如表1所示。

表1 国外HRG研制水平对比Table 1 Contrast of HRGs design level abroad
国内半球固体波动陀螺(HRG)研制开始于20世纪90年代,经过20多年的研究,已经能够生产出满足我国卫星工程应用要求的半球固体波动陀螺产品,已完成空间2年飞行试验任务,表现良好,填补了我国长寿命半球固体波动陀螺的空白。目前,已形成可分别使用于不同空间、地面领域需求的高中低不同精度,分别采用数字/模拟控制方式的系列工程产品,国内HRG发展水平如表2所示。
表2 国内HRG研制水平Table 2 Domestic HRG design level
2.2 MEMS谐振陀螺研制现状
MEMS 谐振环陀螺 (Vibrating Ring Gyroscope,VRG)源于石英半球谐振陀螺,是半球谐振陀螺的简化结构形式。与半球谐振陀螺相比,除了保持半球谐振陀螺敏感结构全对称、高精度、环境适应性好,适合应用在性能要求高并且环境恶劣的航天及军事等领域外,还具有结构简单、可靠、体积小、便于批量化集成制造等特点。目前,谐振环陀螺已经发展到第四代产品(如图4所示),逐渐从机械陀螺转变为MEMS硅基陀螺。

图4 硅微机械陀螺仪发展历程Fig.4 Evolution progress of Silicon micromechanical gyroscope
(1)第一代谐振环陀螺
第一代谐振环陀螺产品采用圆柱壳体的陶瓷结构,类似于传统陀螺,研制平台主要为机械加工平台。其特点是敏感结构采用机械加工手段制备,体积大,敏感信号强,采用传统组织工艺技术。
(2)第二代谐振环陀螺
第二代谐振环陀螺产品通过驱动和检测技术的进步简化了结构,但和第一代产品类似,研制平台主要为机械加工平台。
(3)第三代谐振环陀螺
第三代谐振环陀螺产品采用了新的MEMS加工技术,通过电磁激励和电流检测,使陀螺的体积变小,性能得到大幅度提升。其特点是:1)敏感结构采用MEMS技术加工,并且使用激光修调技术对两个谐振模态间的频差进行调节(频差<1Hz),通过两模态间的匹配增强能量转换能力,提高器件性能;2)采用微电子封装技术(金属管壳)和传统组装技术(磁芯装配)的结合进行产品封装。其研制平台是机械加工平台、微电子平台和MEMS平台的结合。
(4)第四代谐振环陀螺
第四代谐振环陀螺产品采用了全新的MEMS加工技术,去除了陀螺内部的磁芯结构,通过电容激励、电容检测、修调等技术,使陀螺的性能、体积、功耗等得到大幅度提升。其器件特点是:
1)敏感结构采用MEMS技术加工;
2)使用修调技术对两个谐振模态间的频差进行调节(频差<0.1Hz),通过两模态间的匹配增强能量转换能力,提高器件性能;
3)采用专用处理电路和微处理器结合进行信号检测和处理;
4)采用MCM封装形式进行陀螺仪封装。
第四代谐振环陀螺研制平台是微电子平台和MEMS平台的结合,产品的技术特点也是目前世界上主流 MEMS陀螺产品的发展趋势,主要特点包括:
1)敏感结构采用高真空封装,Q值很高;
2)对敏感结构进行调节,提高敏感结构的固有特性和成品率;
3)采用专用处理电路,提升信号处理和敏感结构调节能力;
4)采用微处理器,提升产品的内部补偿和环境适应性;
5)采用MCM一体化封装技术,减小体积,提高稳定性;
6)采用系统级设计,进行敏感结构、处理电路、微处理器以及封装等陀螺仪各部分之间的匹配,充分发挥系统各部分的技术优势,弥补相互间的技术瓶颈,实现系统性能的最大化。
具有上述特点的硅基MEMS陀螺仪已经逐步由新兴走向成熟,进而走向系统集成化道路,实现MEMS IMU等系统的应用。
英国BAE公司采用MEMS谐振环陀螺实现了MEMS IMU系列化,最小体积仅有1in3(1in=25.4mm),是目前世界上最小的IMU单元,可以把此IMU植入到士兵的战靴中,实现单兵全时导航。BAE公司MEMS IMU系列化如图5所示。此类型陀螺具有超高抗高冲击能力,并且采用数字闭环电路控制,通过改变标度因数控制环路的参数,其量程在 600(°)/s~12000(°)/s 的范围内可调整,零偏稳定性<0.1(°)/h。BAE 生产的谐振环陀螺有角速率和速率积分两种模式,研制的产品用于高速旋转弹、中程导弹和美国155mm制导神箭炮弹(Excalibur)等武器系统。ESA研究的空间用MEMS谐振环陀螺已在2012年Cryosat2卫星完成在轨验证,并将用于2018年发射的火星车(ExoMars rover)。

图5 BAE公司系列化MEMS IMUFig.5 Serial MEMS IMU of BAE corporation
日本 SSS(Silicon Sensing Systems)一直从事MEMS谐振环陀螺研制,最新产品零偏稳定性<0.06(°)/h,角度随机游走,是谐振环陀螺的最高水平。
2.3 MEMS碟形陀螺(DRG)研制现状
MEMS碟形陀螺是目前MEMS陀螺中报导精度最高的陀螺器件,也是目前最热门的平面工艺MEMS陀螺结构之一。
早在1994年波音公司研制的半球谐振陀螺(HRG)就应用于波音公司的TDRS HIJ卫星上,并于2000年用于第二代 TDRS卫星,同时开展MEMS陀螺研制,研制路线如图6所示。

图6 波音公司高性能MEMS陀螺研制路线图Fig.6 Advanced MEMS gyroscope's investigation route chart of Boeing corporation
基于半球谐振陀螺和其他MEMS陀螺的研制基础,JPL和波音公司把半球谐振陀螺和音叉式MEMS陀螺结合,提出了多环结构的MEMS碟形陀螺方案,即多环谐振盘陀螺(Disc Resonator Gyroscope)。DRG陀螺包括一系列的同心圆盘,各同心环通过微梁与中心圆盘相连接,如图7所示。这种多同心环结构减少了半径刚度,它的多同心环设计实现结构的全对称性,全对称结构的敏感结构可以减少驱动和检测模态的正交耦合,从而实现硅微陀螺驱动模态与检测模态间的匹配。多环的设计不仅大大增加了电极区域,提高了检测和驱动的电容,从而提高了陀螺的检测灵敏度,也增大了有效质量。增加有效质量对降低噪声水平非常关键,采用多环和多检测电极解决了环陀螺信噪比低的难点。在美国DARPA NGIMG项目支持下,研究取得了突破性进展,基于Si材料8mm直径的 DRG 实现了零偏稳定性<0.01(°)/h,角度随机游走。为进一步缩小和HRG陀螺的性能差距,基于石英玻璃(Fused Silica)材料8mm直径或更大直径的DRG正在研制中。预期目标是DRG的Q值提高一到两个数量级,ARW提升一个数量级。
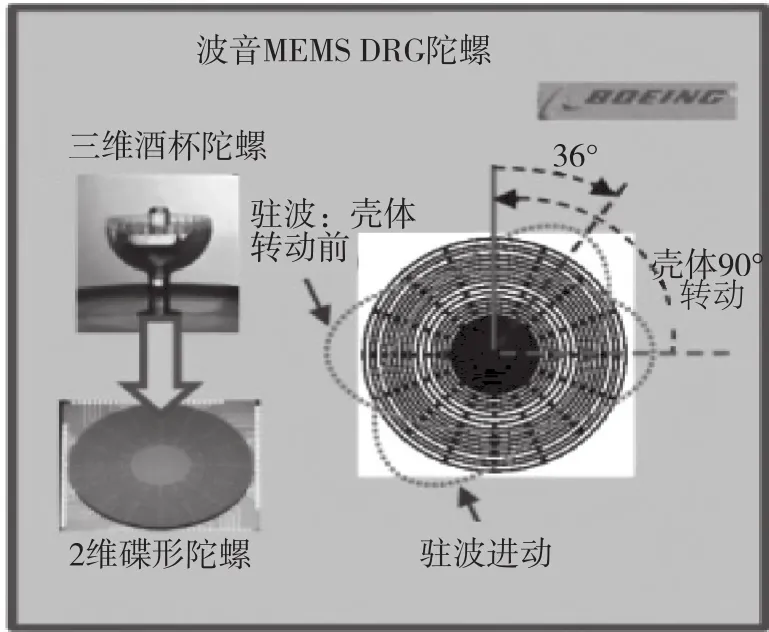
图7 MEMS碟形陀螺Fig.7 MEMS disc resonator gyroscope
2013年,MEMS DRG陀螺研制团队从波音公司和JPL剥离,成立 SIM(Sensor in Motion)公司,专业从事DRG陀螺的研发与生产。依靠30多年积累的技术和经验,生产高性能低成本导航级DRG陀螺,产品代表MEMS陀螺最高水平,达到激光和光纤陀螺性能。基于DRG陀螺的指北仪体积为11in3,质量为0.24lb。
在军用、航天航空等领域,MEMS陀螺中的谐振环陀螺和多环碟形DRG陀螺产品化水平最高,并在武器装备中得到广泛应用。
2.4 某单位MEMS谐振陀螺研制情况
某研制单位发挥其在大规模集成电路设计、小型化一体集成、电路封装测试、4英寸(1英寸=25.4mm)MEMS工艺线的优势,于2008年开始硅基MEMS谐振环陀螺(Vibrating Ring Gyroscope)的研制,是国内首家突破了MEMS谐振环结构设计与加工、处理电路的单片集成(ASIC)、小型化SIP封装和陀螺参数修调等关键技术的单位。2012年研制成功数字化谐振环MEMS陀螺,零偏稳定性≤10(°)/h,体积和质量极具优势,产品具有良好的抗高过载和环境适应性能力,已在炮弹、火箭弹、微小卫星得到工程应用,如图8所示。
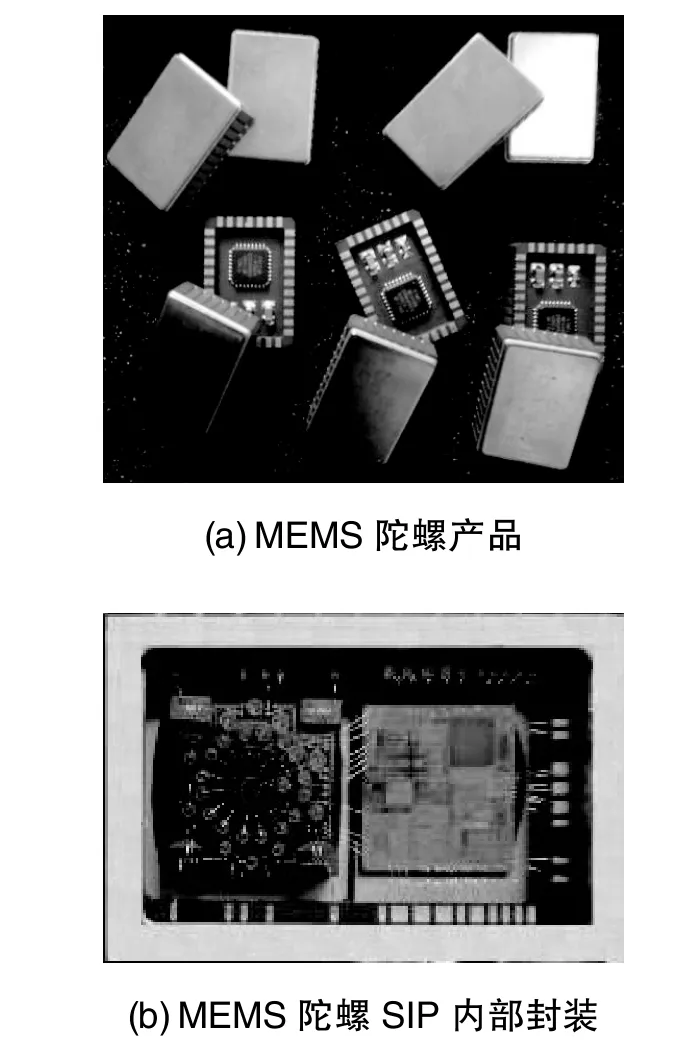
图8 MEMS环形陀螺Fig.8 MEMS vibrating ring gyroscope
MEMS环状陀螺主要性能包括:
1)体积为 11.6mm×16.7mm×4.5mm,质量<2.7g,体积和质量与国内外多片集成MEMS陀螺仪相当,明显优于国内板级集成陀螺。
(1)建模与网格划分 由于3D模型尺寸非常大,为使模拟尽可能接近真实情况以及有效利用计算机资源,笔者将模型网格细划,并且在机架立柱底部的外冷铁位置(人为末端区)和机架对称面将模型做成了1/4对称处理。为避免钢液在浇注系统内冷却过快,将浇注系统单独建模,并且前处理时将其与型砂的界面换热系数设为较低值。首次浇注时让钢液从浇注系统注入,补浇时让钢液从冒口上方注入。
2)零偏稳定性达到 10(°)/h,同国外高端MEMS陀螺1(°)/h相比,还存在一定差距,但在国内属于领先水平。
3)环境适应性。通过陀螺内部温度补偿及IMU模块再次补偿,全温范围(-40℃~85℃)零位温度系数<0.01(°) /s/℃, 标度因子温度系数<1×10-4/℃。由于环陀螺全对称结构,理论上具备抗振动特性,完全能够满足恶劣环境应用要求。20Hz~2000Hz扫频,平直段功率0.06g2/Hz振动条件下,陀螺仪零位变化<1%,与国外处于同一水平。
4)工程化批量生产。由于采用全数字化测试、调整、标定技术,提高了成品率和测试效率,已具备小批量生产能力。
2015年1月,该单位自主研制的谐振环陀螺通过飞行测试,发射过载8000g,历时10ms。经全程记录数据分析,陀螺飞行曲线正常,抗过载能力优良,各测试指标满足型号应用需求,标志着我国MEMS陀螺在抗高过载方面取得突破性进展。至此,该单位的环陀螺已通过原理样机、初样试制和型号应用等各种静态和动态试验考核,具备小批量生产水平,实弹搭载的IMU及炮射搭载实测曲线如图9和图10所示。

图9 装载IMU(内部三轴环陀螺)的实物Fig.9 Material object of IMU(three axes ring gyroscope)
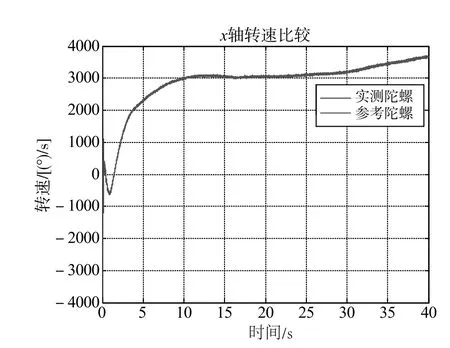
图10 实弹飞行记录数据对比Fig.10 Mortar flight data of ring gyroscope and reference gyroscope
3 未来高端MEMS陀螺发展方向
3.1 美国高端MEMS陀螺研制计划
美国DARPA关于MEMS陀螺的研制计划具有重要参考价值。美国等西方发达国家非常重视MEMS惯性系统与器件的研制,DARPA针对MEMS惯性器件的研制制定了很多具体的计划。美国DARPA MTO在器件级有两项陀螺研究项目,一个为 NGIMG(Navigation Grade Integrated Micro Gyroscopes),一个是 MRIG(Micro Rate Integrating Gyroscope)项目。
NGIMG项目主要研发低功耗微型角速率传感器,在没有GPS信号时为单兵、车辆、无人机和大型作战平台提供支撑。研究目标:零偏稳定性为 0.01(°)/h,角度随机游走为。波音公司多环谐振盘陀螺DRG(Disc Resonator Gyroscope)为重点研制方案,如图3(c)所示。
2011年,DARPA启动的MRIG(Micro Rate Integrating Gyroscope)项目专门研制微半球陀螺,如图3(e)所示,目的是为高动态的空间武器提供支撑。研究目标:量程为15000(°)/s,零偏稳定性为0.01(°)/h,刻度因子重复性为 1×10-8。 该项目鼓励结构创新,美国有8所大学参加研制,设计了多种创新的结构和3D制作工艺方案。
2015年,针对高级惯性器件DARPA新启动PRIGM(Precise Robust Inertial Guidance for Munitions)项目,研制高级新型低CSWaP惯性微传感器AIMS(Advanced Inertial Micro Sensors),满足在高冲击和高振动环境,具有高动态范围、低噪音、高精度的惯性器件,详细指标如表3、表4所示。其中,TA1为高动态环境器件指标,TA2为高精度和高稳定性器件指标。
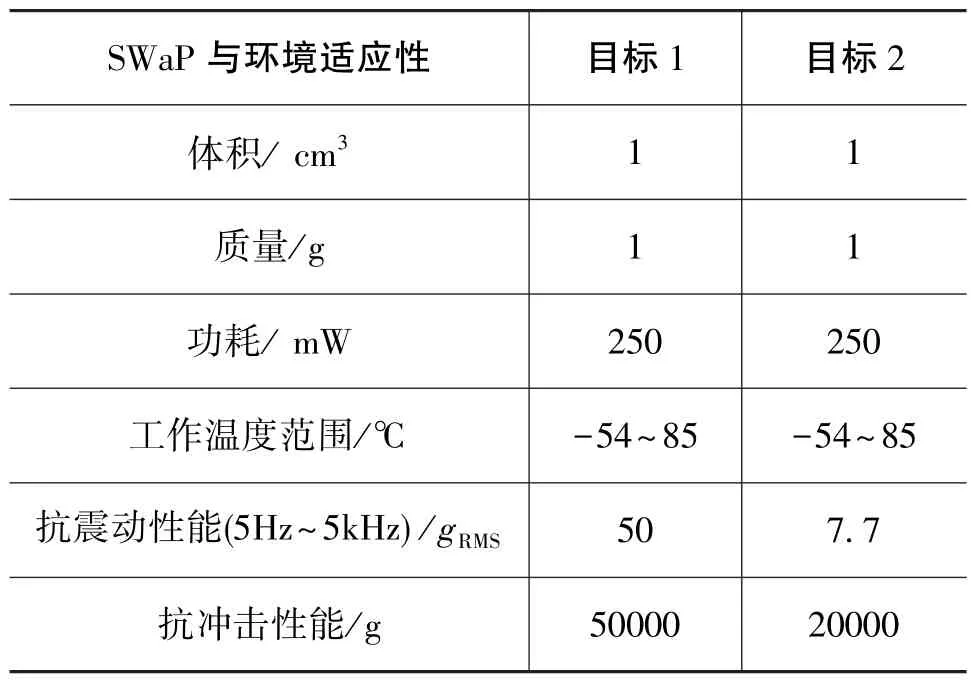
表3 DARPA高级惯性微传感器AIMS研制指标(a)Table 3 DARPA AIMS program objectives(a)
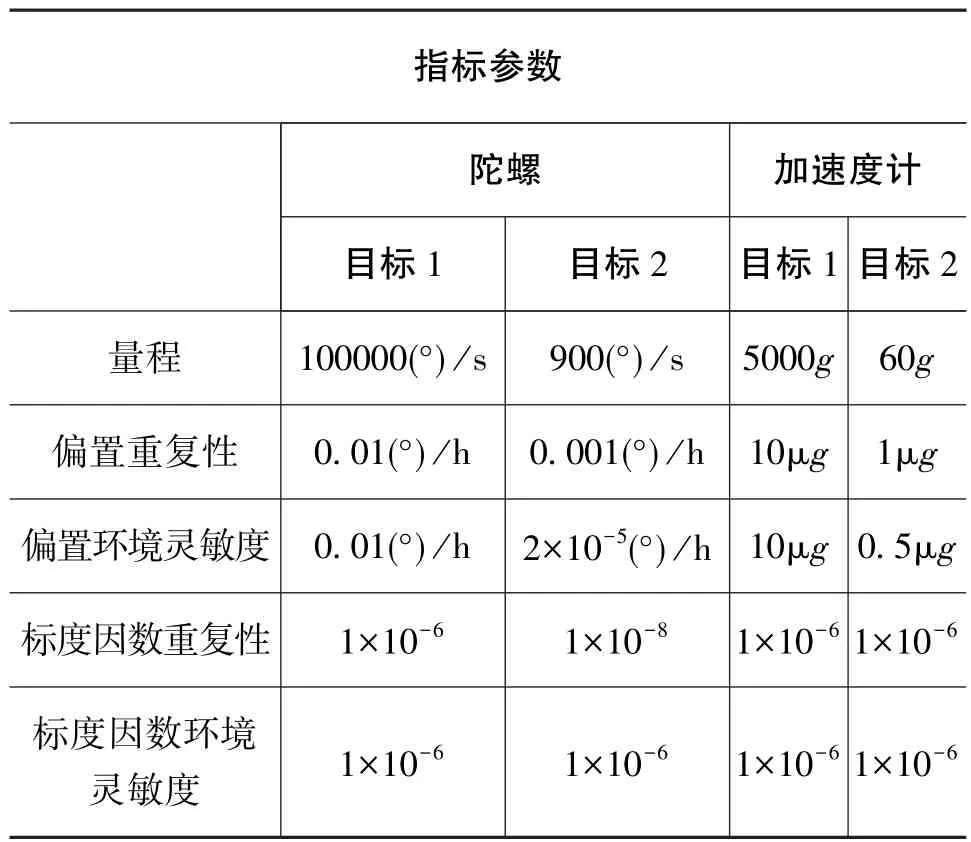
表4 DARPA高级惯性微传感器AIMS研制指标(b)Table 4 DARPA AIMS program objectives(b)
如图11~图13所示,AIMS项目重点支持的3个陀螺研制方向为:1)速率积分陀螺;2)光检测MEMS陀螺;3)片上光波导陀螺。同时,DARPA强调只支持结构上高度对称的二维或三维的MEMS陀螺研制,不支持音叉型MEMS陀螺。

图11 AIMS计划发展的光学MEMS陀螺Fig.11 Optical MEMS gyroscope of AIMS program
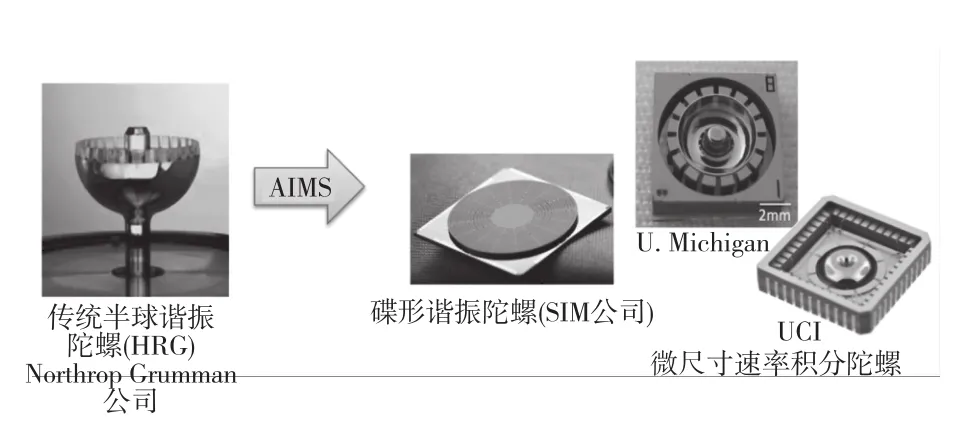
图12 AIMS计划发展的速率积分陀螺Fig.12 Rate integrating gyroscope of AIMS program
图13 AIMS计划发展的片上光波导陀螺Fig.13 Photonic waveguide gyroscopes of AIMS program
3.2 未来高端MEMS陀螺关键技术
MEMS陀螺将不断突破,引入许多关键技术,逐步提高精度,在未来的高端应用领域得到越来越广泛的应用。
(1)静电平衡调整技术
MEMS工艺误差总是不可避免的,高精度MEMS陀螺对工艺误差非常敏感。工艺误差会使器件刚度与阻尼不对称,驱动模态与敏感模态存在频差,陀螺灵敏度降低,精度大打折扣。工艺误差存在随机性,因此要得到高精度MEMS陀螺往往是 “百里挑一”。对工艺误差进行校正、调整,使高精度MEMS陀螺做到由 “百里挑一”变为“百个如一”,是目前保障高精度陀螺成品率的重要技术途径。静电平衡调整技术是高效率、低成本的工艺误差调整技术手段。静电平衡调整可通过静电负刚度效应,调整刚度对称性,使驱动模态和敏感模态频率趋于一致,以提高精度。静电平衡调整技术涉及静电平衡基础理论、静电平衡电极排布、调整电压判据及测试、静电电压施加方法、静电调节自动化等,是未来高端MEMS陀螺的重要关键技术。
(2)速率积分控制技术
速率积分陀螺也称全角模式陀螺,速率积分陀螺相对于速率陀螺具有很多优势:速率积分陀螺动态范围更大、没有带宽限制、噪声误差不随时间累积等。因此,速率积分陀螺是未来高精度陀螺的重要发展方向之一。速率积分控制技术是实现速率积分陀螺的关键技术。
(3)原子级时钟锁频技术
原子级锁频MEMS陀螺是基于原子级锁频技术以提高精度的MEMS陀螺,应用于MEMS陀螺的原子级锁频技术,旨在使MEMS陀螺谐振频率与一个极精准的频率基准(原子钟级别的精度)同步,利用原子钟级别的频率精确性,将MEMS陀螺谐振频率锁定在恒定值,不受环境影响而变化。原子级锁频技术可使MEMS谐振陀螺的角度随机游走(ARW)与零偏稳定性提高几个数量级,从而使陀螺精度具有跨越式提升。原子级锁频技术是大幅提高MEMS陀螺精度极具潜力的技术。
(4)系统自校准技术
自校准技术是指传感器上电后对零位输出进行自动校准、归零的技术。通过自校准技术,抵消陀螺零偏输出,消除陀螺多次上电零偏不一致的问题,对提高零偏重复性,尤其是提高长时间角度检测的精度有重要的作用。自校准技术是保障MEMS惯性传感器精度的又一技术瓶颈。
(5)光检测技术
光学检测方法具有结构简单、精度高、稳定性好、抗电磁干扰等优点。将光学检测与MEMS传感器相结合,使测量精度更高,测量更加智能化,具有广阔的市场前景。
(6)高Q值技术
高Q值是提高陀螺灵敏度的重要途径,是未来高精度MEMS陀螺的关键技术之一。
4 总结与启示
综上所述,半球谐振陀螺是一种典型的固体波动陀螺,具有很高的精度,并已得到广泛应用。但半球谐振陀螺加工难度大,批生产能力差,因此逐步衍生出了适合平面加工工艺的MEMS谐振环陀螺(Vibrating Ring Gyroscope)和谐振盘陀螺(Disc Resonator Gyroscope)。具有全对称特性的MEMS平面陀螺(VRG、DRG)具有良好的环境适应性,美国和欧洲多家军工企业MEMS陀螺均采用全对称特性的MEMS平面陀螺设计与加工技术,并在导弹、炮弹、卫星及空间飞行器上得到广泛应用,是未来高端MEMS陀螺研制的方向。
国内高端军用MEMS陀螺仪环境适应性一直是应用瓶颈。基于航天和军事应用领域对高端MEMS陀螺的需求,建议重点开展基于现有成熟MEMS工艺的二维谐振环和多环谐振盘陀螺的研究。并与应用紧密结合,加强MEMS陀螺的基础理论与误差机理研究,完善MEMS陀螺设计和加工平台。通过MEMS敏感结构、制造工艺与处理算法的集成创新,解决研制技术瓶颈,实现高端MEMS陀螺国产化。
[1]Bryan G H.On the beats in vibrations of a revolving cylinder or bell[C].Proceedings of the Cambridge Philosophical Society,1980,7(3): 101-111.
[2]Putty M W.A Micromachined vibrating ring gyroscope[D].University of Michigan,1995.
[3]Challoner A D,Ge H H,Liu J Y.Boeing disc resonator gyroscope[C].2014 IEEE/ION Position,Location and Navigation Symposium ,2014:504-514.
[4]Ragan R R,Lynch D D.Inertial technology for future,part X:hemispherical resonator gyro[J].IEEE Transactionson Aerospace and Electronic Systems, 1984:432-433.
[5]Loper E J,Lynch D D.Hemispherical resonator gyro:status report and test results[C].Proceedings of the 1984 National Technical Meeting of the Institute of Navigation,1984:105-107.
[6]Ayazi F,Najafi K.A HARPSS polysilicon vibrating ring gyroscope[J].Journal of Microelectromechanical Systems,2001,10(2): 169-179.
[7]Gallacher B J,Hedley J,Burdess J S,et al.Electrostatic correction of structural imperfections present in a microring gyroscope[J].Journal of Microelectromechanical Systems,2005,14(2): 221-234.
[8]Yoon S W,Lee S,Najafi K.Vibration sensitivity analysis of MEMS vibratory ring gyroscopes[J].Sensors and Actuators,2011,171(2): 163-177.
Development and Application of Advanced MEMS Solid Wave Gyroscope
QUAN Hai-yang1,YANG Shuan-hu2,CHEN Xiao-zhen3,WANG Hao1
(1.Beijing Microelectronics Technology Institute,Beijing 100076;2.The 203thInstitute of China North Industries Group Corporation,Xi'an 710065;3.Beijing Institute of Aerospace Control Devices,Beijing 100039)
The developing progress of solid wave gyroscope was summarized,and evolution from solid wave gyroscope to MEMS gyroscope was analyzed.This paper aims at forecasting the developing direction of MEMS gyroscope,promoting the investigation and implication of our national advanced MEMS ring solid wave gyroscope according to analyze the evolution and researching progress of MEMS ring vibrating gyroscope.
MEMS vibrating ring gyroscope; solid wave gyroscope; disc resonator gyroscope
V241.5
A
1674-5558(2017)07-01262
10.3969 /j.issn.1674-5558.2017.06.014
2016-03-29
权海洋,男,研究员,研究方向为集成电路设计与MEMS微系统设计。
