能量最佳分簇水下声传感器网络时钟同步研究
2017-12-20高明生
王 硕,高明生,徐 宁
(河海大学 物联网工程学院,江苏 常州 213002)
能量最佳分簇水下声传感器网络时钟同步研究
王 硕,高明生,徐 宁
(河海大学 物联网工程学院,江苏 常州 213002)
时钟同步技术不仅是水下传感器网络节点协同工作的基础问题也是必要条件。与陆地传感器网络不同,电磁波在水下传播受到的衰减严重,而水声信道带宽窄且信号传播速率低,在水下传播具有很大的时延,给水下传感器网络的时钟同步带来了诸多挑战。文中研究了水下传感器网络的分簇技术,在此基础上提出传感器网络的时间同步算法。该算法将时间同步分为簇间节点同步和簇内同步两个过程,通过求数学期望的方法计算求得最佳的簇数值,当网络分簇的个数为最佳簇数时,全网络的能耗达到最低并延长了网络的生命周期。MATLAB仿真结果表明,与MU-Sync时间同步算法相比,基于能量最佳分簇的水下声传感器网络时间同步算法能耗低且精度高,显示出最佳分簇时钟同步算法的优点。
水下传感器网络;分簇技术;时钟同步;能量
0 引 言
随着无线传感器网络技术的迅猛发展,当前水下无线传感器网络的研究已经受到学术界的高度重视[1]。由于传感器节点间的时间同步对监测数据的精确读取与处理(如对某事件的监测和对设定目标的定位)以及数据的实时传输(如数据包调度和节点唤醒机制)都具有重要的现实意义,因此实现水下无线传感器网络精确的时间同步是保证传感器网络服务质量的根本要求[2]。目前,国内外研究者对应用在陆地上的无线传感器网络的时间同步进行了更加深入的探讨与研究,并提出了一系列适应于陆地上的时间同步协议[3-5]。这些应用在陆地上的时间同步协议虽然同步精度高,但都是使用电磁波发射信号进行通信,传播时延在其同步过程中往往忽略不计。由于电磁波信号在水下衰落严重,因此,声波是水下传感器网络进行通信的主要方式,这为水下传感器网络的时间同步带来了诸多挑战。水下声波的传播速率比空气中电磁波的传播速率低5个数量级(约1 500 m/s)[6],因此时间同步过程中的传播时延不可忽略。
针对上述问题,文中提出了一种基于能量分簇的时钟同步算法[7-8]。该算法先对簇首节点完成时间同步,并以簇首节点完成时间同步的时间为基准,再对簇内的成员节点完成时间同步。该方式使用了动态分簇技术[9],不仅降低了网络能耗,而且减少了通信开销。
1 水下传感器网络分簇技术
水声信号在传播过程中,传播距离与信号频率是引起传播损失的主要原因[10]。因此,水声信号传输的距离越长,衰减的幅度越严重,也会随之产生多径效应和多普勒频移,这些都使原始信道叠加了大量的噪声干扰,在接收端解码时对能量需求也比较大。
综合以上因素,提出了一种分簇技术。水下传感器网络被分成多个簇群,假设每个簇都近似为一个圆形区域,簇首节点的位置处于该圆形监测区域的中心;本簇内的成员节点只能与簇内节点(包括簇首节点)通信,若需与其他簇进行通信则必须通过本簇的簇首节点完成。这种分簇技术缩短了节点间的通信距离,降低了由于长距离传输产生的多径效应和多普勒频移造成的干扰,同时也减少了节点能量的消耗。
该时钟同步模型是以节点的能量为基础而建立的,旨在求出在能耗最低的情况下的最佳分簇数量。该方法的应用背景为海洋的浅海区域。在这种环境中,经过学术研究认为,声信号是通过柱面波进行传播[11]。浅海信号损耗包括扩展损耗、吸收损耗、边界损耗及一些附近损耗(海洋噪声)。
对于水声传感器网络,在节点能量消耗模型的定义方面有不少的参考文献[12-13],采用与文献[13]相同的能量消耗模型。因此节点发送传输数据的能耗可以表示为:
Etx=E0+C×H×r×eα(f)×r×T
(1)

整个网络的分簇完成后,节点与簇首进行通信。假设监测区域共包含N个成员节点,则可通过式(1)计算出簇内所有节点的能耗:
(2)
其中,R为节点到簇首节点之间的距离。
为得到每个簇的能耗,需要对式(2)取期望,计算得出:
(3)
由式(3)可以看出,影响每个簇的能耗的两个变量分别是每个簇内的节点数量与未知的期望E(R×eα(f)R)。
已知节点在簇内区域的概率分布密度函数为f(R),这里假设划分的每个簇为圆形区域,Rch为簇的半径,则:

(4)
因此每个簇内节点的能耗可表示成:

(5)

由此,监测区域的最佳分簇数量可由式(6)计算得出:

(6)
其中,M为监测区域的面积。
在计算得到n后,对随机散落在监测区域的水下传感器节点采用聚类方法,对其进行分簇。
2 基于分簇的时钟同步技术
水下传感器节点的本地时钟由节点本身的晶振提供。晶振受环境温度或者压力等因素的影响,振荡频率会产生偏移,因此时钟同步会产生相应的偏移[14]。本地时钟与标准时钟的关系可由下式表示:
T=at+b
(7)
其中,a为时钟频偏;b为时钟相偏;t为节点的本地时钟;T为节点的标准时钟。
在陆地无线传感器网络中,时钟同步算法按照同步消息交换的过程,大致可以分为接收端-接收端时钟同步算法和发送端-接收端时钟同步算法。综合陆地传感器网络同步算法研究成果表明,接收端-接收端时钟同步算法不能直接应用于水下环境。主要原因是水下链路传播延迟长且存在时变性,同步算法不能忽略往返传播延迟。因此采用第二种方式进行水下时钟同步,该方式的时钟同步一般采用单跳发送信标消息方式。
2.1 簇首节点同步
图1给出了簇首节点同步示意图。

(8)
其中,DCB表示由簇首C到浮标B的传播延迟;DBC表示由浮标B到簇首C的传播延迟。
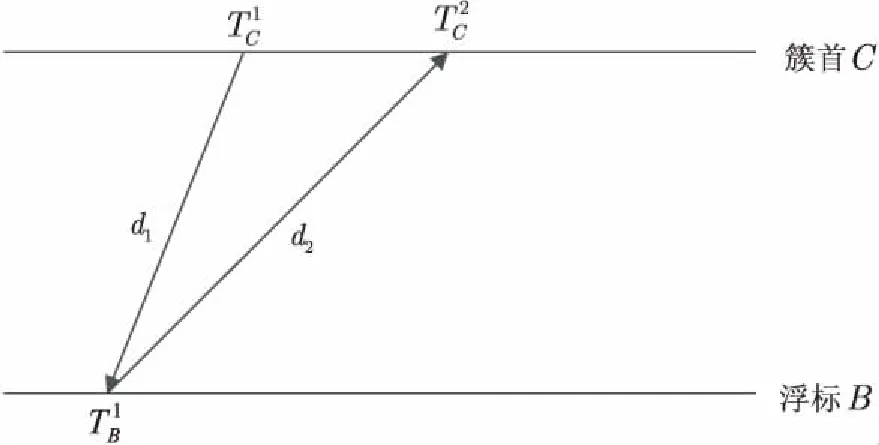
图1 簇间时钟同步原理图

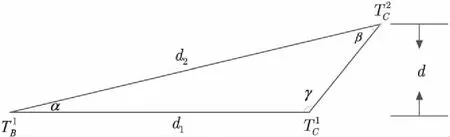
图2 节点移动模型
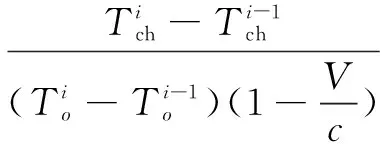
(9)
(10)
可得:
(11)
通过此式能够求解出时钟频偏a的值,求出a后代入式(8)得到时钟相偏b的值。
(12)
2.2 簇内节点同步
已经完成时钟同步的簇首节点作为唯一的信标节点,向簇内待同步节点发送时钟同步信息,同步过程如图3所示。
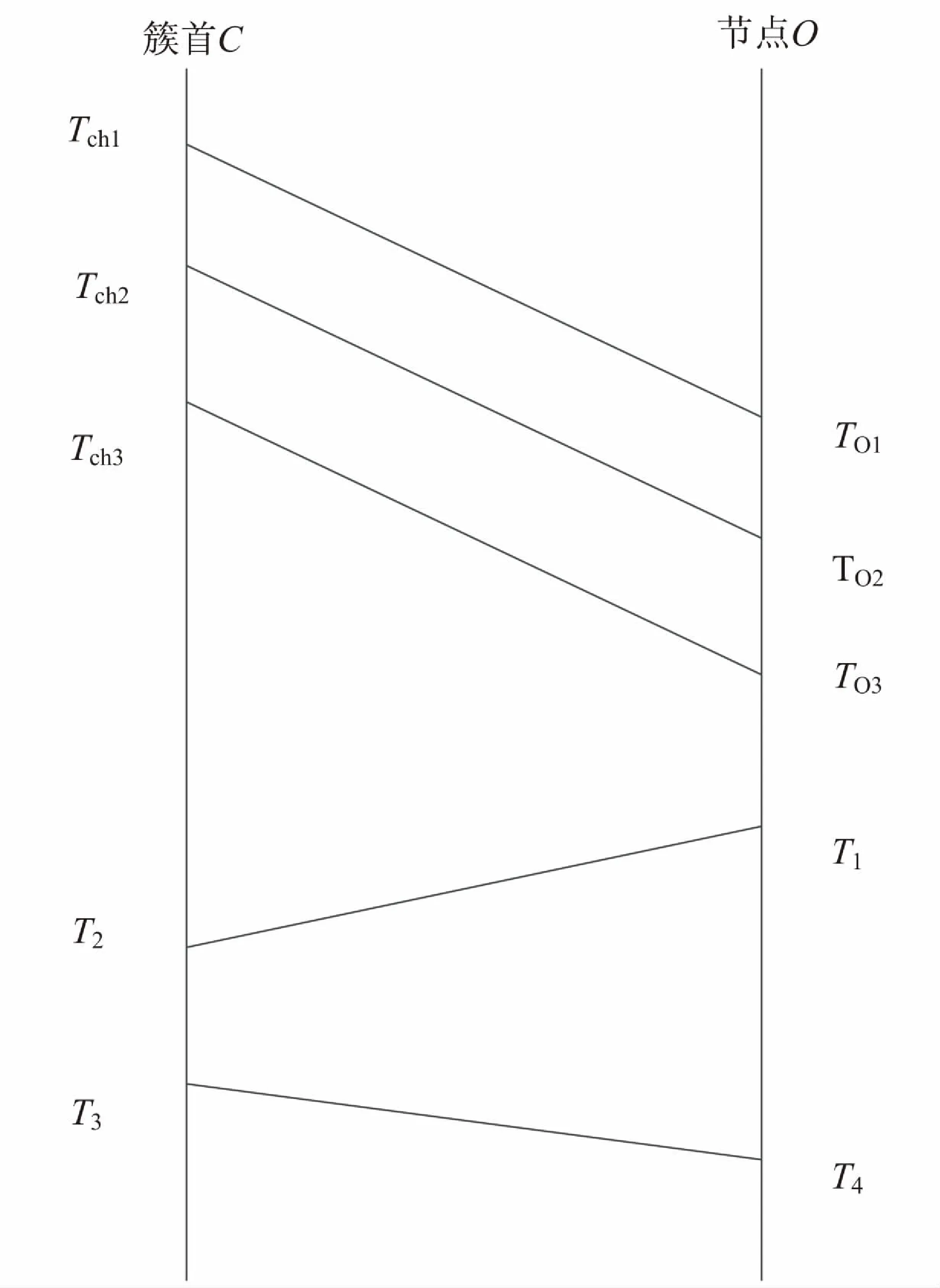
图3 簇内节点时钟同步工作原理图

(13)

(14)
(15)
由式(13)~(15)可得:
(16)
由上式可知,时钟频偏ao的估计值与簇首节点发送消息的时间间隔和节点接收消息的时间间隔有关。
由式(8)可知,修正后的节点时间可以表示为:
(17)
(18)
综合之前的公式,得出b0的表达式为:

(19)
由此,估算出普通节点O相对于簇首节点C的时钟频偏ao和时钟相偏bo。
3 仿真结果与分析
使用MATLAB进行仿真,仿真中采用MAC层时间戳,与MU-Sync时间同步算法进行比较。实验参数与默认值如表1所示。
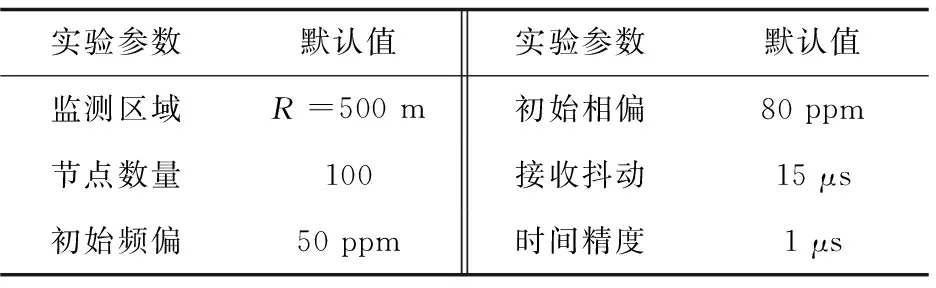
表1 实验参数与默认值
当簇首节点同步次数从10增加到100时,a的误差值线性回归的结果如图4所示。
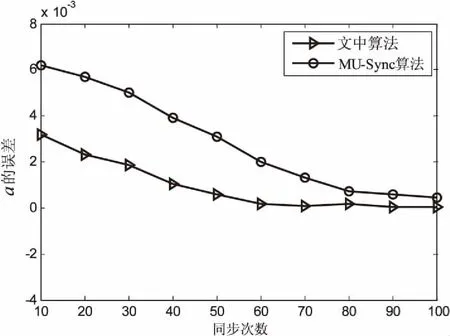
图4 同步次数对a的误差影响
从图4可以得出,随着同步次数的增加,a的误差值呈递减趋势且逼近于0。同时得出文中算法的效果优于MU-Sync同步算法。由于在MU-Sync算法中第一次线性回归估计忽略了传播时延,因此得到的数据误差较大。进行第二次线性回归没有忽略传播时延的变化,并用普通节点本地时间点减去传播时延,但是此时的传播时延是通过第一次线性估计的时钟频偏求得的,因此误差会更大。
图5表示所有节点完成时钟同步后,本地时间的偏差变化。
实验结果表明,文中提出的时间同步算法的精确度高于MU-Sync算法。MU-Sync算法为提高时钟同步精确度,采用两次线性回归估计的办法,但是在第一次线性拟合时忽略了往返传播延迟的变化,仅拟合簇内节点的本地偏斜,使得算法的误差较大。第二次线性拟合在相应的对时元组中减去传播延迟估计,而此刻的传播时延估计较大,因此即使使用两次线性回归估计得到的时间偏差还是大于文中算法。利用文中算法求得的时间偏差较小,综合考虑了往返传播时延的变化,传播链路长度和节点移动之间的关系,从而有效控制了误差。
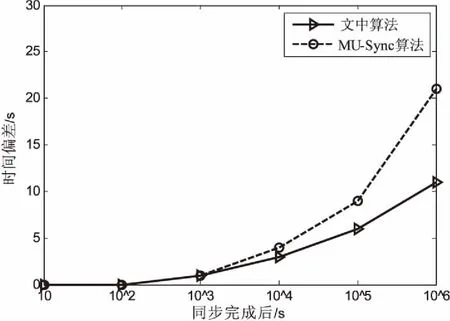
图5 同步后时间偏差变化曲线
4 结束语
水下传感器网络采用水声信号进行通信,而水下信道环境复杂,传播时延长,导致时钟同步所需的能量较高,且同步精度不精确。针对这些问题,提出一种时钟同步算法。该算法分为簇间同步和簇内同步两个过程。簇间同步与固定在水面上的浮标节点进行通信,不仅降低了水声信道的传输时延,而且减少了同步过程中产生的报文数量;簇内同步中指定簇首节点为信标节点,节省了额外部署信标节点的数量。并且,该算法考虑到水下环境中节点随洋流的移动性与往返传输时延的不等,提高了时间同步精度。仿真结果表明,与MU-Sync算法相比,在最佳分簇数量下,时钟频偏的误差,同步完成后的时间偏差与网络能耗都是最优的。因此,分簇的水声传感器网络在时钟同步具有很强的工程意义。进一步的研究工作将改进节点移动的运动学模型与传播链路的路径,以更好地适应真实的水下环境,提高时钟同步精度。
[1] 夏 娜,郑语晨,杜华争,等.刚性驱动水下传感器节点自组织布置[J].计算机学报,2013,36(3):494-505.
[2] 吕 超,王 硕,谭 民.基于循环收敛的UWSN时间同步方法[J].系统仿真学报,2011,23(1):108-112.
[3] ELSON J,GIROD L,ESTRIN D.Fine-grained network time synchronization using reference broadcasts[C]//Proceedings of the symposium on operating systems design and implementation.New York:ACM Press,2002:147-163.
[4] GANERIWAL S,KUMAR R,SRIVASTAVA M.Timing-sync protocol for sensor networks[C]//Proceedings of the 5th international conference on embedded networked sensor systems.New York:ACM Press,2003:138-149.
[5] MAROTI M,KUSY B,SIMON G,et al.The flooding time synchronization protocol[C]//Proceedings of the 2nd internation-al ACM conference on embedded networked sensor systems.New York:ACM Press,2004:39-49.
[6] PIERCE A D,SMITH P W.Acoustics:an introduction to its physical principles and applications[J].Physics Today,1981,34(12):1826-1827.
[7] 丁振华,李锦涛,冯 波.基于Hash函数的RFID安全认证协议研究[J].计算机研究与发展,2009,46(4):583-592.
[8] OHKUBO M, SUZUKI K, KINOSHITA S.Cryptographic approach to “privacy-friendly” tags[EB/OL].[2012-03-22].http://www.rfidprivacy.org /papers /ohkubo.pdf.
[9] 雷 辉,姜卫东,郭 勇.能量高效的水声传感器网络多跳非均匀分簇算法[J].计算机应用,2013,33(1):124-126.
[10] KOPETZ H,OCHSENREITER W.Clock synchronization in distributed real-time systems[J].IEEE Transactions on Computers,1987,36(8):933-940.
[11] LI B,ZHOU S,STOJANOVIC M,et al.Multicarrier communication over underwater acoustic channels with nonuniform doppler shifts[J].IEEE Journal of Oceanic Engineering,2008,33(2):198-209.
[12] 邓淼磊,马建峰,周利华.RFID匿名认证协议的设计[J].通信学报,2009,30(7):20-26.
[13] CHEN Y,CHOU J S,SUN H M.A novel mutual authentication scheme based on quadratic residues for RFID systems[J].Computer Networks,2007,52(12):2373-2380.
[14] 邢芙宁.水下传感器网络时钟同步算法的研究[D].哈尔滨:哈尔滨工程大学,2013.
StudyonClockSynchronizationofUnderwaterAcousticSensorNetworksBasedonOptimalEnergyClustering
WANG Shuo,GAO Ming-sheng,XU Ning
(School of Internet of Things Engineering,Hohai University,Changzhou 213002,China)
Clock synchronization technology is the fundamental problem and also a necessary condition for underwater sensor networks’ nodes to collaboratively work.Unlike terrestrial sensor networks,acoustic channel bandwidth is very narrow,resulting in low signal transmission rate,and the propagation delay is very large in water.The clustering technology for underwater sensor networks is proposed and synchronization protocol is put forward for underwater acoustic sensor networks on the basis.It divides the time synchronization into inter-cluster and intra-cluster synchronization.The optimal number of clusters are calculated by the method of mathematical expectation.The WSN energy consumption will be the lowest when clustered by the optimal number of clusters,and it improves the lifetime of WSN.The simulation on MATLAB shows that compared with another clock synchronization protocol,MU-Sync,the optimal cluster clock synchronization technology not only degrades energy consumption,but also behaves high precision,validating its advantages.
underwater sensor network;clustering technology;clock synchronization;energy
TN929.3;TP393.3
A
1673-629X(2017)12-0144-04
10.3969/j.issn.1673-629X.2017.12.031
2016-12-20
2017-04-21 < class="emphasis_bold">网络出版时间
时间:2017-09-27
国家自然科学基金资助项目(61401148);中央高校基本科研业务费重点培育专项(2015B25214);常州市应用基础研究计划(CJ20159039)
王 硕(1991-),女,硕士研究生,研究方向为水声传感器网络;高明生,博士,副教授,研究方向为计算机网络、水声传感器网络、智能电网等;徐 宁,博士,副教授,研究方向为语音信号处理等。
http://kns.cnki.net/kcms/detail/61.1450.TP.20170927.0958.032.html
