考虑到台风海况浮式风力机半潜式平台风浪流载荷动态响应及系泊性能分析
2017-12-19黄致谦丁勤卫周红杰陈福东
黄致谦, 李 春,2, 丁勤卫, 周红杰, 陈福东
(1.上海理工大学 能源与动力工程学院,上海 200093; 2.上海市动力工程多相流动与传热重点实验室,上海 200093)
考虑到台风海况浮式风力机半潜式平台风浪流载荷动态响应及系泊性能分析
黄致谦1, 李 春1,2, 丁勤卫1, 周红杰1, 陈福东1
(1.上海理工大学 能源与动力工程学院,上海 200093; 2.上海市动力工程多相流动与传热重点实验室,上海 200093)
为研究浮式风力机半潜式平台的动态响应及系泊性能,建立了基于半潜式平台的NREL 5 MW浮式风力机模型.结合有限元方法,并利用辐射和衍射理论,在考虑风、浪、流载荷的联合作用下,运用Aqwa软件对极端海况下半潜式平台的动态响应及系泊性能进行数值仿真,得到了幅值响应算子(RAO)、附加质量、辐射阻尼随波浪频率的变化趋势以及极端海况下半潜式平台的动态响应和系泊线的张力响应.结果表明:半潜式平台在高频区域(大于1.6 rad/s)具有良好的运动性能,动态响应小;垂荡方向动态响应不受波浪方向变化的影响,且波浪方向为0°时,纵荡和纵摇动态响应最为剧烈;台风海况下半潜式平台的动态响应和系泊线的张力响应均大于无台风海况;随着海况恶劣程度加深,半潜式平台的动态响应和系泊线的张力响应均明显增大.
浮式风力机; 半潜式平台; 台风海况; 系泊系统; 动态响应
化石能源支撑着世界经济发展,但现今化石能源日益枯竭,各国经济发展均受到能源紧缺等问题的限制,人们越来越多地开始关注能源问题[1-2].风能是太阳能的一种转换形式,是取之不尽、用之不竭的可再生能源,具有蕴藏量大、无污染、可再生、分布广等特点[3].与陆上风能相比,海上风能具有充裕、平稳、海面摩擦系数小、风能密度大等优点[4].相比陆上风电场,海上风电场的建设不存在噪音污染问题,且不会占用宝贵的陆地资源.根据支撑风力机的塔架形式,海上风力机分为固定式和漂浮式.随着大型现代风力机技术的成熟和海上风力发电的发展,利用浮式平台技术获取海上优质风资源已成为公认的发展方向和研究热点[5].半潜式平台因总投资较小、甲板空间及甲板载荷可变范围大、抗风浪能力强、适应水深范围广和作业功能全面等优势,具有较好的应用前景[6].相比于固定式风力机,浮式风力机增加了浮式基础和锚泊系统,还承受复杂的风、浪、流载荷影响,导致外界载荷条件更加复杂,其摇荡特性对风电机组的发电性能也有较大影响.因此,研究在风、浪、流载荷作用下浮式平台的动态响应非常必要[7].
1972年,Heronemus[8]率先提出具有浮式基础的海上漂浮式风力机(以下简称浮式风力机)概念后,国内外学者开始对半潜式平台等进行探索.2000年,Söylemez等[9]建立半潜式平台模型,将莫里森方程法和格林函数积分方程法2种实用方法计算所得半潜式平台波浪力和动态响应进行比较,并将其与实验结果对比,发现在主要频域范围内2种方法吻合良好.2006年, Zambrano等[10]运用Wamit软件计算了作用在半潜式平台上的波浪力,并分析了在墨西哥风暴海况下半潜式平台6个自由度的动态响应.2008年,Manabe等[11]提出一种基于半潜式船体(semi-sub hull)结构的浮式风力机系统,分析了浮体结构的水动力响应,并优化了该浮体结构.2012年,Lefebvre等[12]对苏格兰北海的浮式风力机进行调查,提出了一种改进的半潜式平台浮式风力机平台概念,并利用Sesam软件对其整体稳定性、经济性和技术性进行了分析和比较.Tang等[13]设计了60 m水深的600 kW半潜式平台海上水平轴风力机,对包括系泊系统、浮式基础、塔架及风力机在内的结构建立了精确的数学模型,并分析了在波浪载荷影响下其结构的频域动态响应.张亮等[14]针对其课题组设计的一种半潜式平台进行了稳定性分析,采用数值模拟方法分别计算了该半潜式平台在不同工况下的力矩曲线.肖宇维等[15]通过Ansys/Aqwa软件计算了规则波作用下不同形式轻型张力腿半潜式平台6个自由度的动态响应,并在不规则波作用下进行了数值分析,得到时域分析结果.上述研究大多仅针对浮式平台的动态响应或系泊性能,较少有人综合考虑浮式平台的动态响应和系泊性能,且在对浮式平台进行动态响应或系泊性能研究时,大多采用单一载荷作用.
目前主要根据海洋石油平台的相关规范和经验进行探索,尚缺乏有关浮式风力机平台所受载荷及稳定性的设计标准[16].平台结构稳定是浮式风力机安全运行的根本保障[4],而动态响应特性是浮式平台相关研究中的重点和难点.动态响应特性不仅是结构形式创新及设计优化的重要内容,同时也为平台的施工、安装及检测提供了支持[1].因此,笔者研究了浮式风力机半潜式平台的动态响应及系泊性能,以期为浮式风力机平台的设计提供参考.
1 浮式风力机参数及系泊系统
1.1 半潜式平台及风力机参数
以半潜式平台为研究对象,半潜式平台选为Semi-submersible[17],浮式风力机选为NREL 5 MW[18].半潜式平台的详细参数见表1,浮式风力机的详细参数见表2.
基于NREL 5 MW风力机参数和半潜式平台参数建立的浮式风力机模型如图1所示.模型的网格分布如图2所示.计算要求1个波长至少要覆盖7个最大网格单元,但网格越细,可计算的波浪频率越大,计算耗时越多.故划分网格时,需根据计算的最大波浪频率来设定网格的控制尺寸.
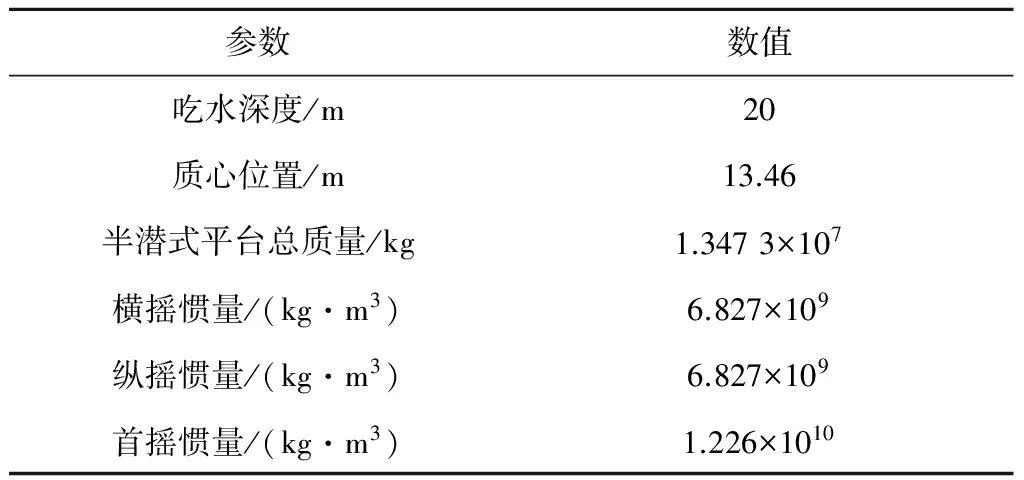
表1 半潜式平台参数

表2 NREL 5 MW风力机参数

图1 浮式风力机模型
1.2 系泊系统
根据API RP 2SK规范,悬链线式系泊系统采用“锚链(上段)-钢缆(中段)-锚链(下段)”布置形式,具有重量小、经济性好等优点,具体设计参数如表3所示.

图2 网格分布

表3 系泊线参数
设计系泊系统时,系泊线为6根,布置方式为3×2对称布置,具体系泊线布置形式见图3和图4.

图3 系泊系统示意图
2 计算流程、环境载荷及参数
2.1 计算流程
应用Aqwa软件对半潜式平台的动态响应及极端海况下的系泊性能进行数值模拟和分析,计算时采用Aqwa-Line模块和Aqwa-Drift模块.
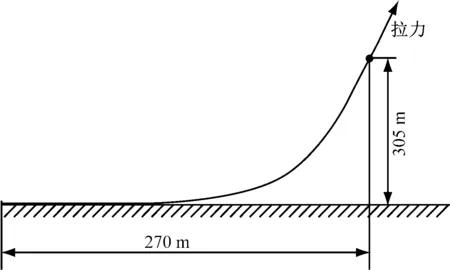
图4 局部系泊线水下示意图
Aqwa-Line模块中,可通过辐射和衍射理论计算浮体结构周围的波浪力,也可获得附加质量、辐射阻尼及频域动态响应.
Aqwa-Drift模块中,可计算在风、浪、流载荷的联合作用下浮体结构的动态响应时间历程和系泊系统的张力响应时间历程.
Aqwa-Drift模块可使用Aqwa-Line模块中的附加质量力、辐射阻尼力及各波长与波浪方向漂移力等数据,可得到风、浪、流载荷联合作用下的浮体结构运动及系泊系统张力响应的时间历程,计算流程图如图5所示.

图5 计算流程图
2.2 风载荷
在船舶与海洋平台等工程设计过程中,风载荷是必须考虑的基本载荷之一.风载荷作用在半潜式平台上,对其产生水平力和力矩,会影响漂浮稳定性及半潜式平台的结构强度.风速及其方向通常随时间变化,但在较长时间段内,风速可作固定值(一般取海平面以上平均风速为10 m/h).假定风速不变,且沿y轴负方向,垂直风力机方向入射.由于设定为恶劣海况,风速已超过风力机的切出风速,风力机处于停机状态,故不考虑风力机叶片旋转产生的载荷.作用在半潜式平台上的风载荷按下式计算:
(1)
Fwi=CwiV2
(2)
式中:Cwi为i自由度的风力系数;CS为受风构件形状系数;Ch为风压沿高度变化的系数;Sj为受风结构在风向上的投影面积;Fwi为i自由度的风力;V为平均风速.
2.3 浪载荷
与陆上风力机不同,作为海洋能源开发的重要装备,半潜式平台风力机长期在恶劣海况中作业并承受多种载荷作用,且受浪载荷的影响,这也是工程设计中关心的重要问题之一.
采用线性势流理论计算浪载荷及运动,流体为不可压缩、无黏、无旋.整个流域为由浮体湿表面SB、波浪自由表面SF和海底表面SD构成的半无限大空间,如图6所示.
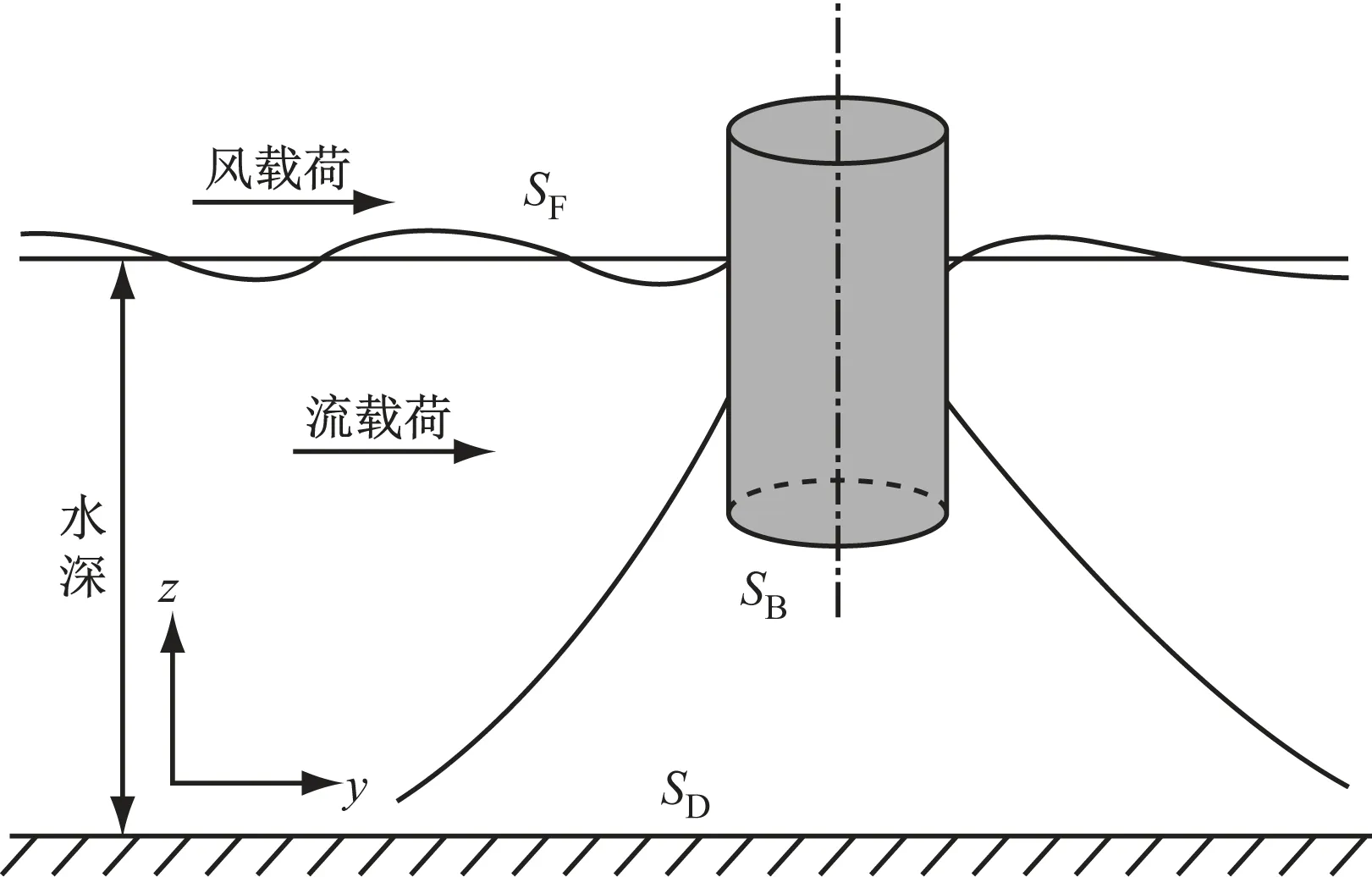
图6 波浪对物体作用示意图
总速度势包括6个自由度上的入射波浪势、绕射波浪势和辐射波浪势,可定义为:

(3)
式中:φ为总速度势;φI为入射波浪势;φD为绕射波浪势;φR为辐射波浪势.
流体的总速度势满足拉普拉斯方程及无穷远的辐射条件(Sommerfeld条件):
▽2φ=0
(4)
为使方程有唯一确定解,须满足定解条件,包括边界条件和初始条件:

(5)

(6)

(7)
式中:g为重力加速度,m/s2;n为浮体湿表面外法向量;vn为浮体沿向量n方向的速度,m/s.
浮体湿表面的水动压力为:

(8)
波浪力Fw和波浪力矩Mw分别为:
Fw=∬SB-pndSB
(9)
Mw=∬SB-p(r×n)dSB
(10)
式中:r为波浪力作用点到重心的距离;ρ为海水密度.
2.4 流载荷
海流是海洋环境中各种流动的集合,是主要动力现象之一.设计水深为320 m,属于深海领域,故海流可视为剪切流.在水平方向上,海流近似为恒速;在垂直方向,海流流速呈梯度递减,海底流速几乎为0.相对风载荷和浪载荷,流载荷较为稳定.计算流载荷时,可认为海流对结构物的作用力仅为拖拽力Fc:
Fc=CSCD(Ac+Af)
(11)
式中:CD为阻力系数;CS为半潜式平台的海流系数;Ac为海面下圆柱构件的投影面积;Af为海面下平面构件的投影面积.
2.5 运动方程
整个浮式风力机系统在波浪环境中的运动方程为:

Fw+Fc+Fi
(12)
式中:M为浮式风力机系统的质量矩阵;C为浮式风力机系统的阻尼矩阵;D1和D2分别为线性阻尼矩阵和平方阻尼矩阵;F为矢量函数;K(x)为以位移为函数的静水力刚度矩阵;x为位移矢量;Fw为浪载荷;Fi为风载荷.
2.6 环境参数
通常情况下,当风、浪、流载荷以相同方向入射半潜式平台时,将对半潜式平台的系泊系统产生最大影响.因此, Aqwa-Drift模块上设置风、浪、流载荷以相同方向入射半潜式平台,即沿y轴负方向、垂直于半潜式平台入射.时域分析选取南海有、无台风2种海况,具体参数如表4所示.

表4 不同海况参数
3 模拟结果及分析
3.1 半潜式平台频域动态响应
3.1.1RAO频域动态响应
浮式风力机半潜式平台有6个自由度,分别为沿x轴、y轴和z轴的平动及绕各轴的转动.其中,由长度单位表示的平动包括纵荡、横荡和垂荡;由角度单位表示的转动包括横摇、纵摇和首摇.浮式风力机半潜式平台6个自由度的运动如图7所示.

图7 半潜式平台6个自由度的运动示意图
受规则波作用,浮体结构产生6个自由度波频动态响应的稳态幅值,称为幅值响应算子(RAO).RAO可反映不同海况对浮体结构的影响,表现为浮体结构受规则波影响下随频率变化的一阶响应幅值:
RAO=ηi/ξ
(13)
式中:ηi为半潜式平台运动第i个自由度的值;ξ为某一频率波浪高度的幅值.
通常认为海洋中波浪高度变化是一个具有零均值、各态历经的高斯随机过程,浮体结构受任意波浪组分作用的响应是该组分波波幅的线性函数,且与对其他波浪组分的响应无关,故可根据所有构成波浪的各组分单元波响应之和得到浮体结构对随机波浪的响应.因此,可用半潜式平台位置RAO来反映在外界载荷影响下半潜式平台在6个自由度的运动情况.
以x轴负方向为0°,逆时针为正,不同波浪方向下(以下简称浪向)半潜式平台纵荡、垂荡和纵摇方向RAO随波浪频率的变化如图8所示,其中纵轴表示对应单位波幅的位移或偏转角.
由图8(a)可知,在纵荡方向上,浪向为0°和45°时两者虽峰值不同,但RAO均随波浪频率的增大而减小,尤其当0

(a)纵荡

(b)垂荡

(c)纵摇
3.1.2 水动力频域响应
在非定常运动过程中,浮式结构物与周围的水相互作用,可使浮式结构物获得加速度及速度.水对物体产生的反作用力包括与加速度成正比的附加质量和与速度成正比的辐射阻尼,附加质量和辐射阻尼是重要的水动力学参数.
图9为各自由度的附加质量和辐射阻尼.由图9(a)可知,垂荡方向上的附加质量大于横荡和纵荡方向上,且其变化最后趋于平稳.由于半潜式平台为对称结构,横荡和纵荡方向的附加质量曲线重合.在常见的波浪周期(0.8 rad/s
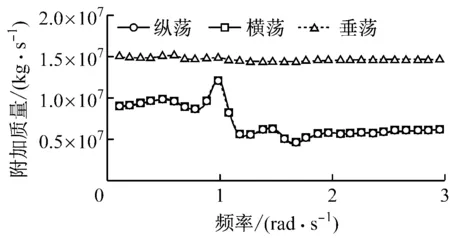
(a)纵荡、横荡和垂荡方向的附加质量

(b)纵摇、横摇和首摇方向的附加质量

(c)纵荡、横荡和垂荡方向的辐射阻尼

(d)纵摇、横摇和首摇方向的辐射阻尼
3.2 半潜式平台时域动态响应
3.2.1RAOs时域动态响应
描述浮式风力机半潜式平台等浮体结构最直接的参数是位移量和转动偏转角.在南海有无台风2种极限海况下,风、浪、流载荷联合作用时半潜式平台的位移量和转动偏转角如图10所示.

(a)横荡

(b)垂荡

(c)横摇
由图10可知,在台风海况下半潜式平台横荡、垂荡和横摇3个方向的动态响应均比无台风海况下的动态响应剧烈,说明随着海况恶劣程度的加深,半潜式平台的动态响应增大.在同一海况下,由于风、浪、流载荷沿横荡方向入射,因此横荡运动的响应最大,垂荡运动次之,横摇运动最不明显.
3.2.2 系泊线的张力响应分析
半潜式平台系泊系统受上述2种海况的风、浪、流载荷作用时,通过Aqwa-Drift计算可得到系泊线的张力响应.由于相邻2根系泊线非常接近,受到的载荷作用也极其相似,故仅需分析1号、3号和5号系泊线的张力响应,其系泊线位置如图11所示.

图11 系泊线位置
图12给出了在2种极限海况下1号、3号和5号系泊线张力随时间的变化曲线.由图12可知,2种海况下所有系泊线的张力响应均达到最大值,且台风海况下系泊线张力响应幅度明显大于无台风海况.相同海况下,由于5号系泊线所处方向为风、浪、流载荷正对方向(沿y轴负方向且垂直于风力机),故其张力响应最大,所受张力响应极值也最大,台风海况时为1 589.31 kN,无台风海况时为581.23 kN;由于1号和3号系泊线处于沿y轴负方向对称位置,故其张力响应时域曲线基本相同,张力响应极值也相近,台风海况时分别为454.83 kN、442.52 kN,无台风海况时分别为391.03 kN、399.92 kN.

(a)1号系泊线
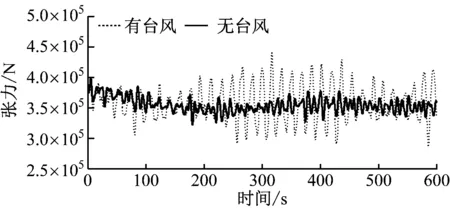
(b)3号系泊线
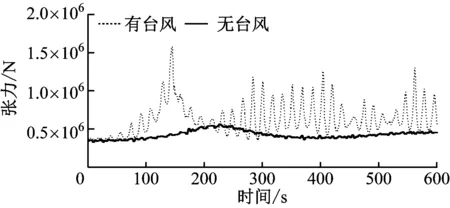
(c)5号系泊线
4 结 论
(1)在波浪低频区域,半潜式平台的动态响应特别剧烈;在波浪高频区域,特别在f>1.6 rad/s区域,半潜式平台运动性能表现良好,响应幅值逐渐趋于0.
(2)垂荡方向的动态响应不受浪向的影响;当浪向为0°时,纵荡和纵摇方向半潜式平台的动态响应程度最剧烈.
(3)不同海况下,各自由度的动态响应不同.随着海况恶劣程度的加深,半潜式平台的动态响应幅度也增大.
(4)随着海况恶劣程度的加剧,各系泊线的张力响应显著增大.
(5)由于5号系泊线位于风、浪、流载荷的入射方向,且半潜式平台结构对称,因此相同海况下5号系泊线张力响应最大,1号和3号系泊线张力响应曲线变化趋势一致.
[1] 丁勤卫, 李春, 周国龙, 等. 基于AQWA的漂浮式风力机驳船式平台的动态响应[J].水资源与水工程学报, 2015, 26(2): 150-155.
DING Qinwei, LI Chun, ZHOU Guolong, et al. Dynamic response of the floating wind turbine on barge platform based on AQWA[J].JournalofWaterResourcesandWaterEngineering, 2015, 26(2): 150-155.
[2] 杨阳, 李春, 缪维跑, 等. 湍流风场与地震激励联合作用下的风力机结构动力学响应[J].振动与冲击, 2015, 34(21): 136-143.
YANG Yang, LI Chun, MIAO Weipao, et al. Response of structural dynamic characteristics of wind turbine operating in turbulent wind combined with seismic motion[J].JournalofVibrationandShock, 2015, 34(21): 136-143.
[3] 丁勤卫, 李春, 周国龙, 等. 陆海风力机动态响应对比[J].动力工程学报, 2016, 36(1): 65-73.
DING Qinwei, LI Chun, ZHOU Guolong, et al. Comparison of dynamic response between stationary and floating wind turbine[J].JournalofChineseSocietyofPowerEngineering, 2016, 36(1): 65-73.
[4] 于华明, 刘容子, 鲍献文. 海洋可再生能源发展现状与展望[M]. 青岛: 中国海洋大学出版社, 2012.
[5] 李春, 叶舟, 高伟, 等. 现代大型风力机设计原理[M]. 上海: 上海科学技术出版社, 2013.
[6] 陈鹏, 马骏, 黄进浩, 等. 基于AQWA的半潜式平台水动力分析及系泊性能计算分析[J].船海工程, 2013, 42(3): 44-47.
CHEN Peng, MA Jun, HUANG Jinhao, et al. Hydrodynamic analysis and mooring system calculation for semi-submersible platform[J].Ship&OceanEngineering, 2013, 42(3): 44-47.
[7] 王志新. 海上风力发电技术[M]. 北京: 机械工业出版社, 2013.
[8] HERONEMUS W E. Pollution-free energy from the offshore winds[M].Washington D C, USA:Marine Technology Society, 1972.
[9] SÖYLEMEZ M, ATLAR M. Comparative study of two practical methods for estimating the hydrodynamic loads and motions of a semi-submersible[J].JournalofOffshoreMechanicsandArcticEngineering, 2000, 122(1): 57-63.
[10] ZAMBRANO T, MACCREADY T, KICENIUK T, et al. Dynamic modeling of deepwater offshore wind turbine structures in gulf of mexico storm condition[C]//Proceedingsof25thInternationalConferenceonOffshoreMechanicsandArcticEngineering. Hamburg, Germany: ASME, 2006.
[11] MANABE H, UEHIRO T, UTIYAMA M, et al. Development of the floating structure for the sailing-type offshore wind farm[C]//OCEANS2008-MTS/IEEEKobeTechno-Ocean. Kobe, Japan: IEEE, 2008.
[12] LEFEBVRE S, COLLU M. Preliminary design of a floating support structure for a 5 MW offshore wind turbine[J].OceanEngineering, 2012, 40(2): 15-26.
[13] TANG Y G, HU J, LIU L Q. Study on the dynamic response for floating foundation of offshore wind turbine[C]//TheASME201130thInternationalConferenceonOcean,OffshoreandArcticEngineering.Rotterdam, Netherlands: ASME, 2011.
[14] 张亮, 邓慧静. 浮式风机半潜平台稳性数值分析[J].应用科技, 2011, 38(10): 13-17.
ZHANG Liang, DENG Huijing. Numerical analysis on stability of the semi-submersible platform of floating wind turbines[J].AppliedScienceandTechnology, 2011, 38(10): 13-17.
[15] 肖宇维, 孙树民. 基于AQWA的轻型张力腿平台型式研究[J].科学技术与工程, 2012, 12(33): 8987-8989.
XIAO Weiyu, SUN Shumin. A study of light tension leg platform types based on AQWA[J].ScienceTechnologyandEngineering, 2012, 12(33): 8987-8989.
[16] 成欣, 叶舟, 周国龙, 等. 漂浮式风力机平台在不同水深下的响应特性分析[J].水资源与水工程学报, 2014, 25(4): 97-103.
CHENG Xin, YE Zhou, ZHOU Guolong, et al. Analysis on response performance for floating wind turbine platforms under different water depth[J].JournalofWaterResourcesandWaterEngineering, 2014, 25(4): 97-103.
[17] ROBERTSON A, JONKMAN J, MASCIOLA M, et al. Definition of the semisubmersible floating system for phase II of OC4[R]. National Renewable Energy Laboratory, Washington D C, USA: 2014.
[18] ROBERTSON A N, JONKMAN J M. Loads analysis of several offshore floating wind turbine concepts[C]//TheTwenty-firstInternationalOffshoreandPolarEngineeringConference. Hawaii, USA: International Society of Offshore and Polar Engineers, 2011.
DynamicResponseandMooringPerformanceofaSemi-submersiblePlatformforFloatingWindTurbineConsideringTyphoonSeaStates
HUANGZhiqian1,LIChun1,2,DINGQinwei1,ZHOUHongjie1,CHENFudong1
(1. School of Energy and Power Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China; 2. Shanghai Key Laboratory of Multiphase Flow and Heat Transfer in Power Engineering, Shanghai 200093, China)
To research the dynamic response and mooring performance of a semi-submersible platform for floating wind turbine, a NREL 5 MW wind turbine model was established based on the semi-submersible platform, with which, numerical simulation was conducted on dynamic response and mooring performance of the platform under extreme sea conditions using Aqwa software by finite element method considering the combined action of random wave, wind and current load with the radiation/diffraction theory, thus obtaining the response amplitude operator (RAO), the additional mass and the rate of radiation damping changing with the wave frequency, as well as the dynamic response of the platform and the tension response of the mooring line under extreme sea conditions. Results show that the platform would have good motion performance with little dynamic response, as the wave frequency is high (above 1.6 rad/s); changes of wave directions have little effect on the heave response; severest responses of surge and pitch would happen in the wave direction of 0 degree; under typhoon sea states, both the peak of dynamic response of platform and the peak of tension response amplitude are above those without typhoon; the dynamic response of platform and the tension response of mooring line increase with worsening sea states.
floating wind turbine; semi-submersible platform; typhoon sea state; mooring system; dynamic response
2016-12-05
2016-12-15
国家自然科学基金资助项目(51676131,51176129);上海市科委资助项目(13DZ2260900)
黄致谦(1993-),男,海南屯昌人,硕士,主要从事漂浮式风力机动态响应及结构动力学响应方面的研究.
李 春(通信作者),男,教授,博导,电话(Tel.):13301777337;E-mail:lichunusst@163.com.
1674-7607(2017)12-1015-08
TK83
A
480.60
