基于头部追踪技术的虚拟现实系统
2017-12-19赣州第一中学
赣州第一中学 黄 裕
基于头部追踪技术的虚拟现实系统
赣州第一中学 黄 裕
一、引言
在20世纪80年代初期,美国的VPL公司创建人拉尼尔提出了一种新的概念,其实施用计算机来实现一种虚拟的体验,叫做Virtual Reality,中文名为虚拟现实,也就是我们常说的VR。其具体内涵为:使用计算机来生成,借助其图形系统以及控制系统,来提供一种可沉浸的反馈技术。而当这个三维环境生成时,其就成为了虚拟环境。
人类的历史,从碑文到书籍,从书籍到电子屏幕,又从电子屏幕到今天的虚拟现实,人们看待世界方式在科技发展的轨道上寻求的新的世界。随着时代进步,早早被提出却没能实现的VR技术,在当下已经日趋成熟,虽然仍有许多弊病,但它未来发展的前景,可谓是无可限量。不论是对于教育、房地产、影视、医疗、交通、城市规划等等方面,它都可以大有作为。因此,VR技术的发展是非常具有研究价值的一个课题。
二、虚拟现实与传感器
虚拟现实技术是多种技术的融合,单头部追踪技术,用到的核心仪器,就是传感器。虚拟现实技术包含实时的三维图形的建立、及时的动作跟踪技术、广角立体实时显示技术以及立体声技术等感觉反馈技术、网络传输技术、语音智能识别等技术。其中在传感器部分中,对于三维姿态的测量,就需要用到传感器这个核心元件。
三维姿态传感器的核心是单片机,经过一个三轴的陀螺仪芯片和一个单轴的传感器芯片,再通过AD转换器进行对应的转换,接着通过单片机完成数据处理,数据在单片机中经处理后,再通过CAN传送到计算机。其系统工作原理如图1所示:

图1 三维姿态传感器的工作原理示意图
此类姿态传感器在工作时的主要的参数有以下几个:测量角度、最小分辨率、数据传输模式、工作电压、工作电流等。
由于传感器只能测得加速度这个数据,但实际运用上无法直接利用,所以加速度需要经过一个转换,转换关系如下
其中X,Y分别表示重力加速度输出, α、β分别表示倾斜角度。然后可以得出:
由此便可以得出相应的倾角。
三、传感器的核心——陀螺仪
陀螺仪是一种测量角速度的装置,其使用的物理现象为科里奥利加速度。其中,科里奥利效应原理如图2所示:

图2 科里奥里力产生原理示意图
我们首先假设有一个旋转的平台,在这样的一个旋转参考系中,有一个物块在平台上,其相对于地面参考系的速度如图所示,这时,如果其滑动到平台的更外面,则其切向速度也会增加,此时由于径向速度,导致其切向速度发生了变化,导致这个变化的加速度,我们将其称为科里奥利加速度。具体的公式推导如下:

而陀螺仪则利用了科里奥利加速度的原理,使用了一种类似上述物体的元件,通过移入与移出这样的谐振“物块”,来测量角速度,进而再通过计算来测量角度变化。
我们举一个典型的例子如下图所示,其为ADXRS系列陀螺仪,其微机械结构如下图所示,其核心就是一个谐振体,而谐振体上布有电容监测元件,其整体由于转动产生的科里奥利效应而产生了位移。其中,电容检测元件为两个标称值相等的电容,其具体结构是硅材料制成的横梁,其与两组静止的横梁相互交叉而形成了整体的结构,而当出现科里奥里力产生的位移时候,会导致电容称为差分电容的出现。
可以试想一下的一个例子,当物体运动的角速度为w时候,假设弹簧的弹性系数为K,测量元件的质量为M,总的电容为C的时候,则其科里奥里力造成的位移为,如果此时横梁间的间距
随着微加工技术以及陀螺仪设计工艺水平的提高,同时顺应市场的需求,微型化、集成化已成为角速度传感器的主流发展方向,玲珑小巧,能精确测量并具有强大功能而价格却十分低廉的传感器已在不远的将来向我们招手。
四、头部追踪系统中的误差分析
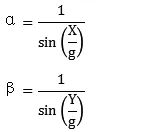
三维姿态传感器是测量系统的角度基准,而在传感器直接测量的测量过程中,误差的来源主要分为系统误差和随机误差。其中系统误差呈规律性分布,有明确的指向性和倾向,随机误差则是呈正态分布。倾角传感器主要误差来源如图4所示。
图4 传感器在倾角测量时常见的误差来源
在补偿时候则是应该尽量减少温度、噪声干扰等的影响,并设置负反馈补偿。
五、结论与展望
展望主要分为在军事、教育、生活以及隐患等方面进行分析。
虚拟现实在军事上同样可以大显身手,通过传感器采集战场上的即时信息,加以VR系统的加工,一个活灵活现的模拟战场就可以出现在指挥部中,指挥官可以在一个房间内即时了解瞬息万变的战场,进行人机交互的分析以及即时指令的下达,不仅如此,还可以非常方便的完成一些重要战役的战场回放。
在教育中,我们可以利用这样一种人机交互的技术,弥补我们教育上硬件资源不足的问题,也可以让我们更好的理解实验数据或是合理分配教育资源。而VR技术在医学领域的前景也是十分广阔,21世纪,医学虚拟系统的研制和开发是最具意义的挑战,研制不同类型的虚拟人体对科学工作者来说更是一项艰巨的任务。
在生活中,虚拟现实的存在更是让一些体验类项目变得更加有趣,比如头戴式显示器Oculus Rift就是一款专为电子游戏设计的虚拟现实设备,它能像电影或动画中描述的那样,一戴上就可以进入到游戏世界中,让人感觉自己就活在游戏当中。内置有陀螺仪、加速器等惯性传感器以及两个目镜的这款头戴显示器,能针对玩家的动作进行实时捕捉,即时跟踪并对画面视角进行调整,大幅提升游戏沉浸感。借助玩家双眼的视差,不断变化的画面一幕幕出现以及环绕立体声随着时间输送给玩家,在这样一个小头盔中,有着另一片让人意想不到的天地。
事物都具有两面性,VR的出现有喜也有忧。UL作为一家知名的国际产品安全测试及认证公司表示,关于VR使用方面的法律法规仍旧是一片空白,如果使用者稍有不慎或是外界有事物产生干扰,就有可能产生精神或身体上的伤害。身体上包括重复性劳损腕隧道症候群、头戴式设备对脑部产生的伤害,例如头痛与视力减退、传染病、长期沉浸导致对实体失去敏感度、电池安全、幼童误食微小零件或是纽扣电池、以及产品结构的安全性能等;心理上包括对现实世界的害怕、逃避或是无法适应,亦或是对虚拟世界的沉迷。

图5 VR设备畅想
完全由计算机生成的视觉、听觉、触觉是VR技术的最高层面。依赖头戴式显示器、传感器手套等辅助强化传感设备,VR技术可以给使用者提供一个进行观察并且进行操作的人机交互的端口,通过这个端口,使用者可以直接观察到虚拟环境中的变化并用身体进行信号的输入从而改变环境。VR技术不单单包含了计算机图形、仿真、传感、显示等技术,它更是这些技术的有机融合。我也相信,我今天的这些初步简单的展望,会在不就的明天,统统变为现实。
[1]刘晓武.基于MEMS陀螺仪的三维姿态传感器的设计[D].西安工业大学,2014.
[2]马燕妮.三维姿态传感器的研制[D].西安工业大学,2015.
[3]沈冰.虚拟现实头盔的延时感与立体感的研究[D].东华大学,2016.
[4]马玉可.一种微惯性跟踪器的设计及其在增强现实中的应用[D].电子科技大学,2010.
[5]郭天太.基于VR的虚拟测试技术及其应用基础研究[D].浙江大学,2005.
[6]康波.增强现实中的跟踪技术[J].计算机测量与控制,2006,11:1431-1434+1455.
[7]应科炜,吴文贡,汤达斌,胡洪平,冯勇建.ADXRS角速度检测陀螺仪原理及应用[J].传感器世界,2006,01:42-44+41.
[8]DING HaiTao,YANG ZhenChuan,WANG ZhanFei,KRAFT Michael,YAN GuiZhen. MEMS gyroscope control system using a bandpass continuous-time sigma-delta modulator[J].Science China(Information Sciences),2013,10:180-189.
[9]Yasushi,Tatsuya.VR system by the combination of HMD and gyro sensor for streetscape evaluation[R].CAADRIA 2005-The Association for Computer-Aided Architectural Design Research in Asia:Digital Opportunities.
[10]Schwald,Bernd.Composing 6 DOF tracking systems for VR/AR[J].Proceedings of Computer Graphics International Conference,CGI[1530-1052].
