基于RFID室内定位算法的研究
2017-12-19广东工业大学郑卜松朱燕飞
广东工业大学 郑卜松 朱燕飞
基于RFID室内定位算法的研究
广东工业大学 郑卜松 朱燕飞
在基于RFID的室内定位系统中,普遍存在定位系统定位精度低的问题,环境因素对室内环境下的无线通信有很大的干扰。为解决该问题,提出融合对数路径损耗模型的landmarc室内定位算法进行室内定位。通过实验获取定位区域内接收信号强度指示(RSSI)的对数路径损耗模型,分别对不同环境下RSSI的对数路径损耗模型进行仿真,再融合到landmarc室内定位算法中去,在对数路径损耗模型下通过阅读器接收信号强度的大小确定节点之间的距离,实现物体的定位。实验结果表明,融合了RSSI对数路径损耗模型的landmarc室内定位算法在定位精度上有很大的提高。
RFID;室内定位;landmarc室内定位算法;对数路径损耗模型
1.引言
Landmark是一种典型的基于RSSI测距的实时室内定位算法,将landmarc室内定位算法引入了RFID参考标签,可减少定位系统中所需RFID阅读器的数量,降低定位系统的成本,并且通过参考标签配合残差加权算法[1]与最近邻算法[2]可提高系统定位精度。
2.改进landmarc室内定位算法
2.1 landmarc算法原理
假设在定位区域分别有M个阅读器和N个参考标签。第i个待测标签的信号强度向量定义如下:

式中,t(i,M)表示在第m个阅读器接收到来自第i个待测标签的信号强度,1≤m≤M。
第n个参考标签的信号强度向量定义如下:

式中,r(n,m)表示第m个阅读器接收到来自第n个参考标签的信号强度,1≤n≤N。
第i个待测标签与第n个参考标签之间的欧几里得距离[3]E(i,n) 计算如下:

第i个待测标签的欧几里得距离向量表示如下:

将第i个待测标签的欧几里得距离向量中的元素按从小到大的顺序排列,然后得到第i个待测标签的欧几里得升序向量:

其中E´(i,1)≤E´(i,2)≤···≤E´(i,N),E´(i,N)越小,表示第i个待测标签与第n个参考标签越近。
根据设置好的K值,选取K个与待测标签最邻近的参考标签来对待测标签进行定位。每个被选中的参考标签的权重因子[4]计算如下:

其中,1≤k≤K。第i个待测标签的坐标估计值的计算公式如下:

2.2 对数路径损耗模型
2.2.1 对数路径损耗模型
在实际情况中,环境因素对信号的传播影响很大,导致在实际情况下无线信号的衰减与通信距离没有固定和稳定的对应关系[5],不同环境下的无线通信有不同的路径损耗模型,所以正确的路径损耗模型能够在很大程度上提升基于RSSI的室内定位精度。
很多研究表明,室内路径损耗遵从对数距离路径损耗模型[6],如公式(8)所示:

式中,PL(d0)表示单位距离下的路径损耗值,单位为dB,d0一般取1m;PL(d)表示距离为d时的路径损耗值,单位为dB;n表示路径损耗指数,n越大,路径损耗则越大,不同环境下n的取值不同;Xσ是服从标准正态分布的随机变量,标准差为σ。将其转换为接收信号强度RSSI值表达式为:

2.2.2 对数路径损耗模型仿真
不同环境下的对数路径损耗模型的仿真如图1所示。
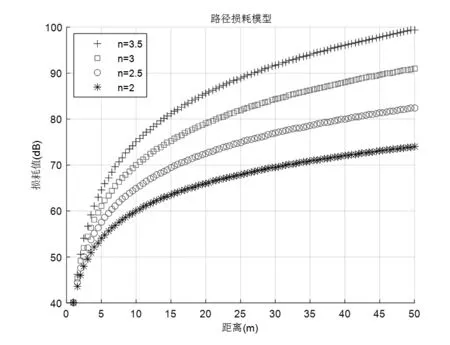
图1 对数路径损耗模型仿真
分别对当n=2、n=2.5、n=3、n=3.5进行仿真,明显可以看出,当n越大时,路径损耗指数越大,信号衰减越严重。阅读器接收到的来自参考标签与待测标签的信号是衰减后的信号,而在空旷区域内这个信号的衰减是遵循对数路径损耗模型的,将阅读器接收到的信号采用对数路径损耗模型来补偿[7],阅读器获得的便是更加精确的接收信号强度指示值,进而能够计算出更精确的欧几里得距离,最后提高算法的定位精度。
2.3 改进landmarc室内定位算法步骤
Step 1:阅读器通过采用对数路径损耗模型,获取分别来自待测标签与参考标签的RSSI值。
Step 2:根据阅读器获取到的RSSI值,计算待测标签与参考标签之间的欧几里得距离。
Step 3:根据欧几里得距离的大小选取与待测标签最邻近的K个参考标签来计算权重因子。
Step 4:利用权重因子与被选取参考标签的实际坐标来计算待测标签坐标值。
3.仿真实验
本仿真实验环境为一个边长为11米的正方形空旷室内区域。在实验区域的四个顶点分别部署一台阅读器,在实验区域中以矩阵形式均匀部署100个参考标签,参考标签之间的间距为1米。
3.1 仿真结果
3.1.1 原landmarc室内定位算法定位结果

图2 landmarc室内定位算法定位结果
原landmarc室内定位算法定位结果如图2所示。从仿真结果中可以清楚的分辨出每个待测标签位置的实际值与估计值。平均定位误差为18cm。
3.1.2 改进landmarc室内定位算法定位结果
在系统布局完全相同的情况下,对原landmarc室内定位算法进行改进,引入对数路径损耗模型。实验测得空旷室内环境下的路径损耗指数n=2,Xσ为取标准偏差为5的正态随机变量。改进后的landmarc室内定位算法结果如图3所示。
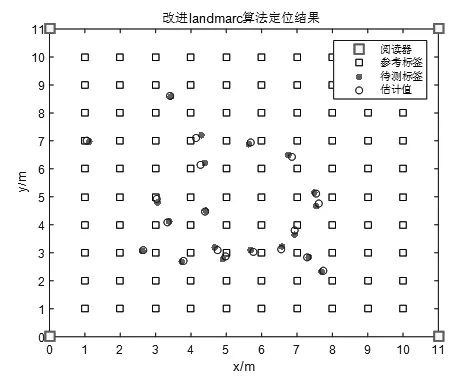
图3 改进landmarc室内定位算法定位结果
3.2 算法误差对比分析
图4的结果显示,在待测标签实际位置相同的情况下,改进landmarc室内定位算法比原landmarc室内定位算法的定位误差小。对于定位区域中的20个待测标签,经原landmarc室内定位算法定位的平均误差为0.1834m;经改进landmarc室内定位算法定位的平均误差为0.09495m。因此通过改进landmarc室内定位算法可以提高室内定位精度。
4.总结
landmarc室内定位算法与改进后的landmarc室内定位算法的定位误差比结果显示,改进后的算法在室内定位精度上有明显的提高。改进后的室内定位算法定位精度保持在10cm左右,比原算法定位精度提高了近一倍。仿真结果验证了对数路径损耗模型提高landmarc室内定位算法的可行性,为后续对存在各种障碍物的室内环境下提高landmarc室内定位算法定位精度的研究提供了理论基础。
[1]曹洁,牛丽波,王进花.一种改进LANDMARC射频识别室内定位算法[J].计算机工程与科学,2015,37(9):1671-1675.
[2]蒋守花,贺春林.基于RFID技术的室内定位算法优化方法研究[J].信息技术,2017(4):24-28.
[3]Manzoor F,Menzel K.Indoor localisation for com plex building designs using passive RFID technol ogy[C].General Assembly and Scientific Sympo sium,2011:1-4.
[4]ZHANG D,LU K Z,MAO R.A Precise RFID In door Localization System with Sensor Network As sistance[J].China Communications(The English version),2015,12(4):13-22.
[5]DAO T H,Nguyen Q C,Ngo V D,et al.Indoor Lo calization System Based on Passive RFID Tags[C].International Conference on Intelligent Systems,2015.
[6]Belhadi Z,Fergani L,Fergani B,et al.RFID tag indoor localization by Fingerprinting methods[C].International Conference on Wireless Communica tions,2014:1-5.
[7]沈郭浩,马永涛,刘开华,等.非视距环境下室内RFID标签定位算法研究[J].计算机工程与科学,2016,38(3):454-459.
Signal Strength Indicator)衰减非常严重,导致基于RSSI测距的landmarc室内定位算法定位误差较大。针对该问题,本文提出了一种改进的landmarc室内定位算法,在原landmarc室内定位算法的基础上,引入对数路径损耗模型,降低环境因素对系统的影响,提高室内定位系统的定位精度。经过仿真实验证明,融合了对数路径损耗模型的landmarc室内定位算法较原landmarc室内定位算法在定位精度上提高了近一倍。
郑卜松【通讯作者】(1992—),男,硕士研究生,主要研究方向:室内定位算法的研究。
朱燕飞(1976—),女,副教授,研究方向:系统建模、智能算法分析及控制。
