基于网络控制的移动监控机器人的设计与研究
2017-12-19桂林电子科技大学贺州学院苏南光
桂林电子科技大学 贺州学院 苏南光
桂林电子科技大学 张华成
贺州学院 杨雄珍 赖丽萍
基于网络控制的移动监控机器人的设计与研究
桂林电子科技大学 贺州学院 苏南光
桂林电子科技大学 张华成
贺州学院 杨雄珍 赖丽萍
移动机器人监控系统应用在勘察和监控功能场所,采用无线网络的方式,移动机器的监控和勘察不用受到有线的束缚,使得监控系统的操作更具灵活。本文对移动机器人无线监控系统的进行设计,介绍了上位机控制软件、主控板控制、摄像头视频采集等几个方面的设计与实现。通过实验表明:设计的移动监控机器人系统,能应用到监控领域。
移动机器人;Arduino;视频监控;无线传输
0 引言
移动监控机器人具有灵活的移动能力,并具有对周围环境感知和视频监控的能力,广泛应用于楼宇、仓库和家居,环境危险或恶劣情况中,代替操作人员进入现场,主要通过移动机器人传回的视频图像和环境参数,就能对现场作出清晰的判断。随着嵌入式技术的进步,移动监控机器人的研究及实现技术进入了全新的发展阶段[1]。在自动化和机械制造领域,各种各样的自动化控制仪器等设备进行集中互联起来已经成为发展趋势[2]。如果利用互联网技术将加工设备、机器人及现场控制系统等连接起来,就可以实现互联网环境下的自动化。所以将机器人的控制技术、网络技术相结合将具有非常重要的理论研究意义和广泛的应用前景[3-7]。
本文通过模块化、结构化等硬件设计思想,设计了能根据实际情况需要,随时安装不同功能的传感器,并实现了具有无线网络通信能力的移动监控机器人。为了监控移动机器人的速度信息、路面运行动态状况、舵机信息、电机信息等实时运行情况,必须采集到移动机器人的相关状态信息及运行的动态信息传输到上位机,上位机接收到移动机器人前端信息,实时判断移动机器人的状态,上位机经过判断后,向移动机器人发出指令,可以设置相关参数,如速度、加速度和运动方向等。实现了远端遥控现场机器人的运动,设计能方便的、人性化的移动监控机器人,可以使我们及时地收集关键数据,并对数据进行必要的处理。可见,移动机器人的开发,具有非常实际并有着极大使用意义[8]。
1 移动监控机器人系统总体设计
本系统设计主要包含下位机移动机器人硬件部分和上位机控制部分。对于下位机的设计包括了Arduino主控板和网络摄像头等部分,其中Arduino主控板主要用于收集各类传感器的信息、对舵机、直流电机的控制功能;网络摄像头主要用于视频信息采集。上位机控制部分,接收下位机传递上来的数据,经过PC端控制软件,向下位机发出控制信息,同时可控制网络摄像头,获取网络摄像头视频信息,以及对摄像头采集的信息进行软件处理。

图1 系统总体架构图
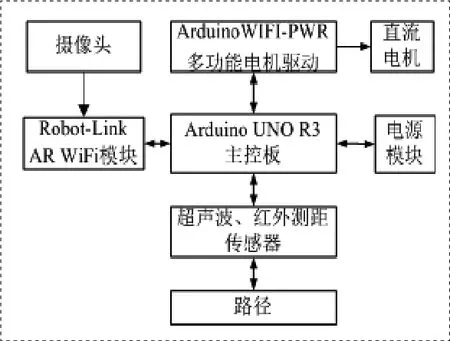
图2 控制系统结构框图
系统总体架构如图1所示。系统设计步骤:(1)根据设计要求,确定控制方案。(2)利用Altium Designer设计合理的硬件原理图。(3)画出程序流程图,使用C#语言进行编程,运用Arduino进行模拟调试。(4)将各元件焊接在PCB板上,并将程序烧录到单片机内。(5)进行调试以实现控制功能。
2 移动监控机器人系统硬件平台搭建
移动监控机器人主要由Arduino UNO R3主控板电路、Robot-Link V4.0 AR WIFI模块、L298N驱动模块、直流电机、小车底板、电源模块等组成[9]。其控制结构图如图2所示。
2.1 Arduino主控板电路
Arduino UNO R3主控板采用ATMEGA328P芯片作为控制单元。Arduino是一块基于开放源代码的USB接口Simple I/O接口板(包括12通道数字GPIO,4通道PWM输出,6-8通道10bit ADC输入通道),并且具有使用类似Java,C语言的IDE集成的硬件和软件。Arduino UNO是Arduino USB接口系列的最新版本。
2.2 无线WiFi路由模块
由模块采用的处理芯片是MT7620N,此路由器是OpenWRT系统,该系统是一个高度模块化、高度自动化的嵌入式Linux系统,拥有强大的网络组件和扩展性,常常被用于工控设备、电话、小型机器人、智能家居、路由器以及VOIP设备中。该路由模块可作为转发站,实现USB摄像头的加载及与单片机的串行通信。
2.3 视频采集系统
视频监控系统共分为视频采集系统、云台镜头控制系统、信号传输系统以及视频处理系统。视频监控技术采用基于嵌入式技术来实现,该技术具有体积小、稳定性高、无序现场值守、实时性好且结构简单等优点。其工作过程为通过安装在下位机的机器人上安装摄像头,摄像头采集现场数据,上传到上位机处理后,能实时地完成对现场情况的监控,并对其信息作出相应处理,特别是有异常情况发生时,能快速、实时地作出反应,帮助操作者提供正确的决策。
2.4 电机驱动模块
采用L298N作为电机驱动芯片。L298N具有高电压、大电流、响应频率高的全桥驱动芯片,一块L298N可以分别控制四个直流电机,并且带有控制使能端。该电机驱动芯片驱动能力强、操作方便,稳定性好,性能优良。L298N的使能端可以外接电平控制,也可以利用单片机进行软件控制,满足各种复杂电路的需要。L298N是内部有两个H桥的高电压大电流全桥式驱动芯片,可以用来驱动直流电动机、步进电动机。另外,L298N的驱动功率较大,能够根据输入电压的大小输出不同的电压和功率,解决了负载能力不够的问题[10]。
2.5 电源模块
由2200mAh 7.4 8A 保护板锂电池组成。通过7805稳压芯片稳压,通过0.1uF和470μF电容进行滤波。
3 系统下位机以及上位机软件设计
上位机控制程序采用C#语言进行编程,能够实现通过Robot-Link V4.0 AR WIFI 模块对下位机发送指令以及接收。同时也通过Wireless Module传输云台的图像信号到上位机的图像显示窗口。
上位机PC用户端运行在控制端的控制程序,首先要建立服务器等待响应端的连接请求,在连接成功后则需要完成如图3所示功能。PC远程控制端软件总体功能,主要包含视频图像解码显示、数据处理和显示、控制信息数据的发送等部分。

图3 PC控制终端总体功能框图
下位机Arduino主控板采用Arduino IDE进行开发。Arduino语言基于wiring语言开发,是对avr-gcc库的二次封装,不需要太多的单片机基础、编程基础。因为Arduino的种种优势,越来越多的专业硬件开发者已经或开始使用Arduino来开发他们的项目、产品;越来越多的软件开发者使用Arduino进入硬件、物联网等开发领域。
下位机是机器人的执行机构,其主要工作为收集各传感器数据,按照相关协议将数据打包,从串口发送到上位机的服务器,同时接收上位机控制信息,通过接收串口命令、解析串口命令、驱动硬件,直接控制各个外部设备和传感器,其运行于单片机上,主要程序流程如图4所示。正常工作情况下,程序循环执行,接收命令、解析命令、执行命令、返回结果,根据控制命令设置 PWM 参数,控制直流电机转速,从而控制机器人运动速度和方向。

图4 下位机程序执行流程
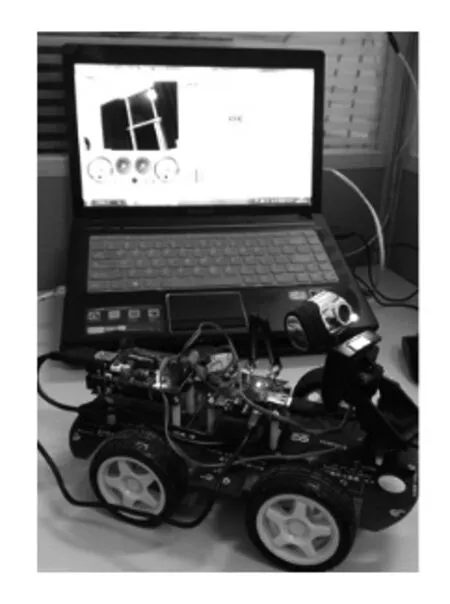
图5 移动监控机器人实物图
4 系统测试
基于机械设计、硬件选择、移动机器人原型的照片是在我们实验室开发。移动监控机器人实物如图5所示。机器人的机制实现使用四个固定轮子由四个直流电机控制。Arduino UNO R3单片机产生PWM信号控制的速度和方向。机器人是由给定的命令驱动在电脑系统软件和关键算法运行。惯性传感器、无线摄像机和直流电机安装在机器人。系统设计完成后,需要对各部分反复进行测试,从测试过程中发现可能存在问题,为下次设计的改进提高依据,系统测试步骤也是验证设计是否满足要求。系统测试主要测试系统的硬件部分、软件部分和控制部分,测试结果保证系统硬件满足运行环境;测试软件看是否正常启动;测试控制端看是否正常响应用户操作、是否发出正确控制命令和解析视频数据,最后测试通讯协议和系统的实时性,看数据是否准确实时传输。
系统硬件测试上电后,检查系统电压、各模块电压是否正常;查看电压电路的系统电压是否存在短路情况,测试系统电压是否为5V电压等。软件调试主要是将下位机控制部分程序烧入单片机,并直接将单片机串口转接到PC,通过PC上的串口调试助手按协议发送控制命令,调试系统控制部分。控制器是否能正常解析命令并返回请求数据。
将开发好的上位机软件在PC电脑中安装,然后将网络连接到机器人的无线“热点”,这样将上位机控制端、机器人端组成无线局域网络;再在控制端界面中,将设置机器人的IP地址和端口号,上位机控制端和机器人了解成功后,在监控界面就能显示机器人采集是视频图像,正常的实时视频图像如图6所示。测试发送运动控制命令是否正常,视频录制和图片保存是否正常。

图6 实时视频图像
5 总结
本文设计并实现了一款基于网络控制的移动监控机器人,并介绍了硬件和软件的实现过程。具体工作内容包括:
⑴分析了机器人技术研究的现状和发展趋势,结合当前发展迅速的嵌入式技术和移动互联网技术,提出了一种的移动监控机器人。
⑵完成了机器人硬件电路的设计和调试工作。搭建起了红外线传感加超声波 模块化的移动监控机器人硬件开发平台。
⑶对整个系统进行了软硬件测试,测试结果达到设计目标。
⑷实现机器人在无线网络环境下运动。
⑸保留了扩展功能。机器人小车在完成设计预想的前提下,主要考虑了车体结构设计的简单化,使之更具有普及性。由于设计要求并不复杂,没有在电路中增加冗余的功能,保留了各种硬件接口和软件子程序接口,方便以后的扩展和进一步的开发。
[1]Kovadic,Z.,Cukon,M.,Brkic,K.,et al,”Design and control of a four-flipper tracked exploration&inspection robot”,Control&Automati on(MED),2013 21st Mediterranean Conference on,2013,pp.7-12.
[2]Kasim M.Al-Aubidy,Mohammed M.Ali,Ahmad M.Derbas,et al,”GPRS-Based Remote Sensing and Teleoperation of a Mobile Robot”,10th International Multi-Conference on Systems,Signals and Devices(SSD),Hammamet,Tunisia,2013,pp.1-7.
[3]Marin,L.,Valles,M.,Soriano,A.,et al,”Event-Based Localization in Ackermann Steering Limited Resource Mobile Robots”,Mechatronics,IEEE/ASME Transactions on,vol.19,no.4,2014,pp.1171-1182.
[4]Han Xiao,Payandeh,S.,”Experimental design and analysis in kinematic-based localization in wireless mobile platform network”,Systems Conference(SysCon),2012 IEEE International,2012,pp.1-6.
[5]Dey,G.K.;Hossen,R.;Noor,M.S.,et al,”Distance controlled rescue and security mobile robot”,Informatics,Electronics&Vision(ICIEV),2013 International Conference on,2013,pp.1-6.
[6]Guangming Song,Kaijian Yin,Yaoxin Zhou,et al,”A surveillance robot with hopping capabilities for home security”,Consumer Electronics,IEEE Transactions on,vol.55,no.4,2009,pp.2034-2039.
[7]Sourangsu Banerji,”Design and Implementation of developed an Unmanned Vehicle using a GSM Network with Microcontrollers”,International Journal of Science,Engineering and Technology Research(IJSETR)Volume 2,Issue 2,2013,pp.367-374.
[8]Schmid,K.,Hirschmuller,H.,”Stereo vision and IMU based real-time ego-motion and depth image computation on a handheld device”,Robotics and Automation(ICRA),2013 IEEE International Conference on,2013,pp.4671-4678.
[9]Schwartz,F.P.,Benac,C.,Rocha,V.R.S.,et al,”Microcurrent Stimulation Device Controlled by ATMEGA328P-PU Chip and Android App”,2016 Global Medical Engineering Physics Exchanges/Pan American Health Care Exchanges(GMEPE/PAHCE),2016.
[10]Derbas,A.M.,Al-Aubidy,K.M.,Ali.et al,”Multi-robot system for real-time sensing and monitoring”,15th International Workshop on Research and Education in Mechatronics(REM),El Gouna,Egypt,2014,pp.1-6.
Design and Implement of Mobile Monitoring Robot Based on net control
Nangguang Su1,2,Huacheng Zhang1,Xiongzhen Yang2,Liping Lai2
(1Guilin University of Electronic Technology,Guilin,China2Hezhou University,Hezhou,China asunanguang00@163.com)
The mobile robot system can actually be applied to some of the places reconnaissance and monitoring,and the use of wireless networks,making the operating system more flexible,so that movement of the machine by monitoring and investigation without the shackles of cable.In this paper,we present the design and implementation of a mobile system with wireless for remote monitoring and control.It was composed of multiple sensors,control board,camera video capturer and wireless communication module.The robot prototype was manufactured and experimented.Experiment results of typical cases verified its flexibility and reliability.
Mobile Robot;Arduino Platform;Video Monitoring;Wireless Transmission
2015年广西科学研究与技术开发项目“地方高校科普创新工作模式研究与平台建设(项目编号: 2015ED31077)”;贺州市科学研究与技术开发计划项目“基于物联网技术的重点危险源监管模式研究(贺科攻1707041)”;2017年校级科研项目“具有可信增强功能的能源监控系统与管理研究(2017ZZZK03)”。
苏南光(1989—),广西岑溪人,大学本科,现就读于桂林电子科技大学。
张华成(1970—),湖南宁远人,高级实验师,硕士生导师,主要研究方向:数据库系统与计算机通信网络组网工程。
杨雄珍(1966—),女,广东信宜人,贺州学院机械与电气工程学院院长、副教授,主要研究方向:物理学。
赖丽萍(1976—),江西定南人,助理研究员,主要研究方向:计算机应用技术。
