一种改进的模糊综合航迹关联算法
2017-12-19沈阳理工大学信息科学与工程学院王志伟胡树杰
沈阳理工大学信息科学与工程学院 王志伟 胡树杰
沈阳理工大学机械工程学院 刘 炜
一种改进的模糊综合航迹关联算法
沈阳理工大学信息科学与工程学院 王志伟 胡树杰
沈阳理工大学机械工程学院 刘 炜
模糊综合航迹关联算法的效果在很大程度上取决于目标状态估计方法,针对传统模糊综合算法在复杂环境下关联效果变差的问题,提出了一种改进的模糊综合航迹关联算法,算法在衰减记忆扩展卡尔曼滤波的基础上,通过提高隶属度函数模糊因素集的精度和抑制隶属度函数展度值的不定向发散,解决了由于隶属度函数性能下降导致的关联结果严重恶化的问题。仿真结果说明,复杂环境下,改进算法使得平均关联正确率提高2.96%。
模糊综合决策;模糊因素;隶属度函数;展度
0 引言
在雷达信息融合系统中,包含量测、量测数据预处理、航迹起始与终结、目标跟踪、形成航迹。目标跟踪是航迹关联的基础,而目标跟踪的关键在于运动模型和跟踪方法的建立。传统的航迹关联算法在卡尔曼滤波的基础上进行,由于其过分依赖过去数据,导致滤波发散,加之模型误差的影响使得影响航迹关联效果的隶属度函数展度发散,进而导致航迹关联效果严重恶化,本文在衰减记忆扩展卡尔曼滤波的基础上,通过调整折扣因子,不仅提高了跟踪精度,而且提高了隶属度函数展度性能,最后通过多因素模糊综合决策方法进行关联,解决了隶属度函数性能下降导致的关联效果恶化的问题。
1 一种改进的模糊综合航迹关联算法
1.1 目标状态估计
采用衰减记忆扩展卡尔曼滤波方法[1]进行多目标状态估计,算法通过折扣因子在其有效记忆窗函数范围(窗函数长度为1/α)内,对预测协方差和杂波序列进行修正,从而限制了滤波器记忆长度,更加强调了新息的作用,削减了验前数据的作用,解决了由于模型误差导致的滤波发散。
1.2 航迹关联中多因素模糊评判准则
1.3 多因素模糊综合评判模型
模糊因素集[2]uk表示对判决起作用的第k 个模糊因素,在雷达数据处理时,通常取3类模糊因素集,其本质是关于目标位置、速度、加速度的信息。模糊因素集每个因素对应的权值构成模糊因素权集,权值表示第k个因素对关联判决的影响程度,U和A的具体取值根据实际情况而定。
隶属度函数是模糊判决的核心,表示基于第k个因素判为两航迹的相似度,根据航迹关联中模糊因素的特点,通常选用正态型隶属度函数,其表达式如下:

其中τk为调整度,σk为uk的展度,由目标状态估计一步预测协方差矩阵决定。当按单因素评判时应有。即得到模糊关系矩阵为:
在模糊关系矩阵R和模糊权集A的基础上,定义了两航迹相关程度的模糊集B。模糊集B为模糊权集A和模糊关系矩阵R的复合。即:

gij的值域为[0,1]。毫无疑间,如果g则航迹i与j必定在l时刻相关;如果则它们必定不相关。,构造k时刻两局部节点航迹相关的紧密度矩阵G[3]为:


2 算法仿真
为了验证算法的性能,用蒙特卡洛方法进行50次仿真,每次仿真50步,在50批目标环境下进行.这里仅考虑两个局部节点,并且每个局部节点配有一部2D雷达.目标被模拟为在两维平面上变速、存在有意和无意机动,具有可以认为在速度上变化的过程噪声,目标初始位置在(18km×5km)区域按均匀分布产生,初速和初始航向分别在4~600m/s和0~2π之间均匀分布,折扣因子a取0.8。对经典卡尔曼滤波和衰减记忆扩展卡尔曼滤波方法进行仿真和比较,通过调整衰减记忆似然函数折扣因子的大小,观察其值对目标运动状态估计效果及航迹关联正确率和错误率效果的影响。结果如图1-4。

图1 经典kalman滤波航迹关联状态估计轨迹局部展示

图2 衰减记忆扩展kalman滤波状态估计轨迹局部展示

图3 第一、二类模糊因素集条件下航迹关联正确率
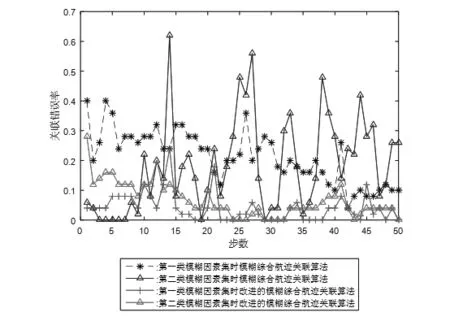
图4 第一、二类模糊因素集条件下航迹关联错误率
仿真结果分析:从图1、图2可以看出,经典kalman滤波对直线型运动轨迹跟踪能够取得很好的效果,但对曲线型运动轨迹的跟踪却出现了不可预知的发散点。采用衰减记忆扩展kalman滤波则克服了经典kalman滤波发散的缺点,此外结果表明航迹关联结果很大程度上受目标跟踪算法的影响,这是由于描述航迹相似性的隶属度函数展度值来自于预测协方差矩阵,由于新的滤波算法强调新数据的影响,从而提高了隶属度函数展度性能,进而提高了隶属度函数性能,最终取得了理想的航迹关联效果,结果表明改进的算法可平均提高关联正确率2.96%,关联正确率保持在90%以上。
[1]李莉.衰减记忆扩展卡尔曼滤波在目标跟踪中的应用[J].电子测量技术,2011,34(2):36-37.
[2]何友,王国宏,关欣.信息融合理论及应用[M].北京:电子工业出版社,2010,241-242.
[3]朱璟,彭展.模糊综合决策航迹关联算法分析与改进[J].计算机工程,2016,42(11):225-232.
