倾转三旋翼无人机过渡模式走廊曲线研究
2017-12-18史凤鸣蔚建斌
陈 琦, 江 涛, 史凤鸣, 蔚建斌, 方 亮
(军械工程学院无人机工程系,石家庄 050003)
倾转三旋翼无人机过渡模式走廊曲线研究
陈 琦, 江 涛, 史凤鸣, 蔚建斌, 方 亮
(军械工程学院无人机工程系,石家庄 050003)
针对倾转三旋翼无人机飞行模式转换中的高度保持问题进行研究,提出一种新的过渡策略,使飞机可以直接从悬停状态开始过渡转换而不需要获得一定初始速度。采用牛顿-欧拉法对过渡模式进行动力学建模分析,建立了纵向动力学模型;通过对模型进行分析给出了倾转角度和前飞速度的一一对应关系,即过渡段走廊曲线;依托倾转三旋翼无人机实验样机,按照两种不同倾转方式进行飞行试验。对地面站遥测数据分析的结果表明:按照走廊曲线倾转,较好地解决了直接倾转时的掉高问题,从而验证了走廊曲线的有效性。
倾转三旋翼无人机; 飞行模式; 过渡模式; 走廊曲线
0 引言
倾转三旋翼无人机是一种独特的旋翼飞行器,它既可以像直升机一样垂直起落,又可以像固定翼飞机一样高速飞行,可用于电力巡线、森林火险侦察等民用领域,也可部署于小型水面舰艇执行军事任务,具有广阔的应用前景[1]。国外主要针对倾转双旋翼机气动弹性耦合、建模分析和飞行控制等方面进行了深入研究,并取得很大进展,美国于20世纪50年代就对倾转旋翼技术进行了研究,开始于XV-3,发展于XV-15,成熟于V-22“鱼鹰”。国内对倾转旋翼飞行器的研究起步较晚,一些高校和研究机构针对倾转双旋翼和四旋翼进行了相关探索并取得一定成果,由于三旋翼飞行器存在结构稳定、综合能耗低、抗风性强的特点,相关技术研究开始受到重视[2]。
目前,国内对倾转旋翼机的研究主要集中在控制方面。文献[3-5]针对倾转三旋翼飞机直升机模式进行了研究;文献[6-9]对倾转双旋翼飞机过渡段控制进行研究,但是对过渡模式只是提出控制策略,没有给出具体的走廊曲线(倾转角度-飞行速度的对应曲线)。倾转旋翼机控制的关键在于过渡模式的控制,而过渡模式中走廊曲线的设计是进行飞行控制的基础,只有对倾转角度和飞行速度进行匹配,才可以进行姿态控制。文献[10]提出了一种倾转双旋翼飞行器走廊曲线分析方法,但是并未考虑气动力矩的因素,且要求飞机必须具有一定的前飞速度才可以进行模式切换。本文提出一种新的过渡策略,使飞机从悬停模式直接进入过渡模式,对过渡过程中的走廊曲线进行研究。
1 飞行过程
倾转三旋翼无人机是固定翼飞机和旋翼直升机的综合体,图1为倾转三旋翼无人机实验样机。

图1 倾转三旋翼实验样机Fig.1 Tilt tri-rotor experimental prototype
倾转三旋翼无人机的飞行过程包括直升机模式、过渡模式和固定翼模式。飞行器以直升机模式垂直起降后进入悬停状态(见图2a),之后2,3旋翼开始向前倾转进入过渡模式(见图2b),直到2,3旋翼转至水平,过渡模式结束,开始进入固定翼模式(见图2c)。

图2 倾转三旋翼机不同飞行模式示意图Fig.2 Schematic diagram of tilt tri-rotor UAV in different flight modes
2 建模分析
建立如图3所示的机体坐标系。

图3 机体坐标系示意图Fig.3 Body coordinate frame
图3中:原点O位于机体重心,其中,Bx指向机头方向,By指向机身右方,Bz垂直于机身向下;Ti为第i(i=1,2,3)个旋翼产生的拉力;γi为第i(i=1,2,3)个旋翼相对Bz轴倾转的角度。
2.1 过渡转换策略
倾转角是过渡模式中飞行状态的重要特征参数,它对旋翼拉力在机体轴x和z方向上的分量大小、前飞加速度和高度变化都具有重要影响,因此要首先设计过渡段倾转角的变化过程,即过渡转换策略。
过渡转换策略设计要兼顾快速性和平稳性的原则,文献[10]针对倾转双旋翼机设计了一种过渡策略,要求飞机必须以直升机模式飞行获得一定前飞速度才可以转入过渡模式,过渡时间较长。根据倾转三旋翼特点,本文设计一种新的过渡策略,把整个过渡过程分成前后两段。在过渡段前段,旋翼直接倾转一定角度,该角度可由飞机参数确定;在过渡段后段,倾转角度通过飞控控制与前飞速度进行匹配。
为便于描述,先明确几个特殊状态。
1) 悬停状态:记为状态a,第i(i=2,3)个旋翼产生的拉力记为Tia,此时倾转角度为0°。该状态下升力完全由3个旋翼提供,左右旋翼转速大小相等方向相反以抵消反扭,尾旋翼通过左右转动控制飞行器偏航角,平衡状态时根据旋翼转向,向左右有一个小角度偏转以平衡自身反扭,本文中,根据实验室制作飞行器的参数确定γ1=2.8°,该状态下满足
T2a+T3a+T1acosγ1=mg
(1)
T2al2+T3al2-T1acosγ1l1=0。
(2)
2) 过渡段前后两段分界点:记为状态b,当2,3旋翼拉力最大时在该状态纵向分力恰好平衡重力,第i(i=2,3)个旋翼产生的拉力记为Ti b,对应倾转角度记为γib,该状态下满足
T2bcosγ2b=T2a
(3)
T1b=T1a。
(4)
3) 气动升力与重力平衡时:记为状态c,此时倾转角度为90°,完成过渡过程。
过渡策略如下:飞行器在悬停状态a时开始进入过渡模式,2,3旋翼直接向前倾转γ2b进入状态b,旋翼拉力在纵向分力恰好平衡重力,假定这个过程是瞬间完成,过渡段前段结束;之后飞行器获得前向分力开始加速,从而产生气动升力,随着倾转角度增大,旋翼纵向分力逐渐减小,此时需要气动力进行补偿才能平衡飞机重力,为使飞机俯仰力矩平衡,需要同时减小尾旋翼升力,直至飞机的气动升力完全克服自身重力,达到状态c,飞行器进入固定翼模式,2,3旋翼转至水平完全提供前向拉力,尾旋翼停止转动。
2.2 数学建模
过渡过程中,飞机所受合力与合力矩是旋翼拉力和气动力共同作用的结果,研究过渡段走廊曲线的主要意义在于实现定高控制和姿态控制,假定通过姿态控制使得过渡过程中俯仰角θ=0°,机体迎角α=0°。
根据牛顿定律,建立飞行器纵向力和力矩模型为
(5)
(6)

3 走廊曲线设计
根据过渡方案设计,在γ2=γ3∈(0,γ2b)时,只需要旋翼拉力的垂直分量便可以保持飞行器高度,此时飞行速度为0。在γ2=γ3∈(γ2b,90°)时,对飞行器进行配平,使FZ=0,M′=0。
首先确定过渡模式前段旋翼倾转的最大角度γ2b,该角度由飞机的整机重量和旋翼电机的性能参数决定。
根据式(3)可得
(7)
式中:T2a为悬停状态时旋翼电机提供的拉力;T2b为旋翼电机所能提供的最大拉力。
联立式(1)、式(2)可得

(8)
然后确定过渡模式后段旋翼拉力的大小,主要是尾旋翼拉力的大小。为了使得飞机尽快加速,减少过渡时间,2,3旋翼在过渡模式后期始终提供最大拉力,而尾旋翼拉力由力矩方程确定。
由式(6)可得

(9)
最后确定过渡模式后段走廊曲线,后段转换过程中2,3旋翼始终同步倾转,因此满足T2=T3,γ2=γ3。
联立式(5)、式(6)可得

(10)
4 仿真和实验
为了检验上述走廊曲线的有效性,本文针对倾转三旋翼实验样机进行仿真和初步实验。该机选用NACA5412翼型,3个旋翼选用恒力源W63-40电机。飞机的相关参数如表1所示。
利用AVL软件仿真,可以得到飞机升力系数CL=0.391 99,俯仰力矩系数Cm=-0.037 92。
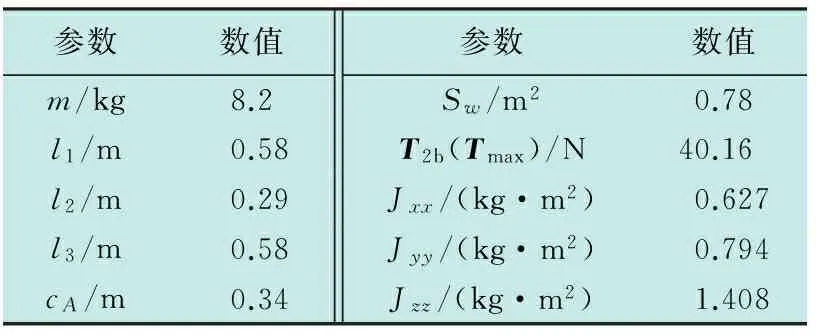
表1 样机参数表
4.1 理论仿真
通过Matlab仿真可以得到过渡模式走廊曲线,如图4所示。

图4 过渡模式走廊曲线Fig.4 Corridor curve of transition mode
从图4可以看出,在过渡段前段,2,3旋翼直接倾转γ2b=48.6° 转速增至最大,由于时间很短可以认为是瞬间完成的,过程中不需要前飞速度,因为旋翼拉力的纵向分量可以平衡重力。在过渡段后段,倾转角度需要和前飞速度一一对应,因为旋翼拉力的纵向分量不足以平衡重力,从而需要气动力进行补偿。
过渡过程中,气动升力、各旋翼纵向分力变化如图5所示。

图5 过渡模式各力的变化Fig.5 Changes of the various forces in transition mode
从图5中可以看出,在过渡模式后段,随着倾转角的增大,飞行速度逐渐增大,相应地,气动升力也逐渐增大,而各旋翼拉力在纵向的分力逐渐减小,因此纵向合力保持不变。
4.2 实验验证
为检验过渡模式走廊曲线的实际效果,按照两种不同倾转方式进行飞行试验。飞行试验过程中利用地面站对飞行数据进行记录和分析,最后通过比较两种不同过渡策略下过渡段飞行高度的变化曲线来检验走廊曲线效果。
首先采取暴力倾转方式进行试验,当飞机处于悬停状态时,下达指令使2,3旋翼直接倾转至水平,之后手动遥控飞机按固定翼模式飞行,根据地面站记录的遥测日志,提取出该过渡策略下飞行高度变化曲线,如图6所示。从图6可以看出,采取暴力倾转方式过渡,飞机会出现掉高现象,大约掉高13 m。

图6 暴力倾转时飞行高度变化Fig.6 Changes of the altitude by violence tilting
然后采取按过渡走廊曲线进行倾转的策略,进入过渡模式后,2,3旋翼倾转角度由飞控系统进行控制,根据地面站记录的遥测日志,提取出该过渡策略下飞行高度变化曲线,如图7所示。从图7可以看出,对比暴力倾转方式,按照走廊曲线过渡,飞机高度在小范围内变化,基本实现了定高过渡。

图7 按走廊曲线倾转时飞行高度变化Fig.7 Changes of the altitude by corridor curve tilting
5 结论
本文针对倾转三旋翼无人机过渡模式下高度保持问题进行了研究,首先采用牛顿-欧拉法对飞机进行建模分析,之后根据三旋翼无人机特点提出了直接从悬停状态开始倾转的过渡策略,并给出了过渡段走廊曲线,最后,通过飞行试验表明:飞机过渡模式下按照走廊曲线控制旋翼倾转,能够较好地解决直接倾转时的掉高问题。本文设计的过渡转换策略和走廊曲线可以为过渡段姿态控制提供参考。
[1] 陈恒,左晓阳,张玉琢.倾转旋翼飞机技术发展研究[J].飞行力学,2007,25(1):5-8.
[2] 徐敏.倾转旋翼机的发展与关键技术综述[J].直升机技术,2003(2):41-44.
[3] 王海洋,路平,江涛.三旋翼构型倾转旋翼无人机建模与悬停控制研究[J].电光与控制,2015,22(10):51-55.
[4] PAPACHRISTOS C,TZES A.Modeling and control simulation of an unmanned tilt tri-rotor aerial vehicle[C]//IEEE International Conference on Industrial Technology(ICIT),2012:840-845.
[5] 杨阳,崔金峰,余毅.三旋翼飞行器动力学分析及建模[J].光学精密工程,2013,21(7):1873-1880.
[6] 万华芳.倾转旋翼飞行器过渡段仿真研究[D].南京:南京航空航天大学,2011.
[7] 曹芸芸,陈仁良.倾转旋翼飞行器的操纵策略和配平方法[J].南京航空航天大学学报,2009,41(1):6-10.
[8] 夏青元,徐锦法,金开保.倾转旋翼飞行器的建模和操纵分配策略[J].航空动力学报,2013,28(9):2017-2028.
[9] CARLSON E B,ZHAO Y J.Prediction of tiltrotor height velocity diagrams using optimal control theory[J].Journal of Aircraft,2003,40(5):896-905.
[10] 陈永,龚华军,王彪.倾转旋翼机过渡段纵向姿态控制技术研究[J].飞行力学,2011,29(1):30-33.
OnCorridorCurveofTransitionModeforaTiltTri-RotorUAV
CHEN Qi, JIANG Tao, SHI Feng-ming, WEI Jian-bin, FANG Liang
(Department of UAV Engineering,Ordnance Engineering College,Shijiazhuang 050003,China)
Aiming at altitude-keeping of a tilt tri-rotor UAV in flight mode conversion,a new transition strategy was proposed,by which the UAV could implement the transition directly from hovering state without requiring an initial velocity.The Newton-Euler method was adopted for dynamics modeling of the transition mode.The relationship between tilting angle and flight speed,i.e.,the corridor curve of transition mode,was obtained according to the model analysis.Flight test was made to two different tilting modes by using the experimental prototype of tilt tri-rotor UAV.Analysis to the telemetering data obtained from ground station shows that the corridor curve of transition mode is effective for altitude-keeping.
tilt tri-rotor UAV; flight mode; transition mode; corridor curve
V249.1
A
1671-637X(2017)03-0024-04
2016-03-02
2016-04-21
“十二五”国防预研项目(51325050101)
陈 琦(1988 —),男,河南驻马店人,硕士生,研究方向为测控与飞行控制技术。
