电动汽车充电桩控制系统的设计
2017-12-18王海群
王海群,彭 川
(华北理工大学 电气工程学院,河北 唐山 063210)
电动汽车充电桩控制系统的设计
王海群,彭 川
(华北理工大学 电气工程学院,河北 唐山 063210)
针对电动汽车充电速度慢以及充电桩控制系统不稳定等问题,设计基于MSP430F149单片机的电动汽车充电桩智能充电控制系统,阐述该系统硬件电路以及软件的设计。并设计一种带放电去极化的三段式可变脉充电方法,提高充电速度的同时消除快速充电产生的极化。同时结合免疫反馈和模糊控制,设计一种模糊免疫自适应PID控制器来提高控制性能。通过仿真,并与传统PID以及模糊PID的控制性能进行对比,模糊免疫自适应PID控制系统的控制性能得到大幅的提高。
充电桩;充电方法;控制系统;模糊免疫;PID控制
0 引言
面对能源紧缺和大气环境污染等问题,电动汽车成为当代汽车发展的重要方向,充电系统作为配套系统不可或缺。现有的充电桩由于早期行业没有统一标准,导致通用性不佳,充电速度慢,而且控制系统落后,容易导致汽车电池欠充和过充,影响电池寿命[1]。控制系统对于充电桩来说至关重要,采用传统PID控制系统对于时变性强、参数多并且非线性充电桩系统来说,存在适应能力以及抗干扰能力不强等问题,设计一种好的控制方法对于控制性能的提高至关重要。文献[2]提出模糊控制与 PID相结合的控制策略对锂动力电池进行充电,具有充电时间短、鲁棒性强等特点。文献[3]结合模糊PID控制策略与耦合控制方法,对蓄电池的充电电流进行跟踪,从而达到同步、等值、限流充电的目的[3]。
本文结合单片机技术,并将模糊免疫控制算法应用到PID控制器中,设计一款快速充电的充电桩控制系统。充电桩实时与电池管理系统(BMS)通信来获得电池组的信息,在线整定充电策略并实时调整输出电流,避免电池发生极化。当达到停止充电条件时自动停止充电,完成充电过程,防止过充和欠充。
1 充电方法的设计
极化是电流流过电极时造成电极电势偏离平衡值的现象,它不仅使电池的效率降低,还能导致电池发热而加速电池的老化,影响蓄电池使用寿命。随着充电电流的增大极化现象更加严重,对电池充电形成阻碍,所以必须要减弱电池充电的极化现象来实现快速充电。美国科学家Maas以最低电池出气率为前提,提出了蓄电池最佳可接受充电电流曲线,在充电过程中,把电流保持在曲线以下就能很好地避免极化现象[4]。
脉冲充电方式是一种用间断电流对电池进行充电的方法,在充电间断停止时加入适当的负脉冲,可以提高电池的充电电流的接受率,提高充电速度而且减小极化的影响。因此结合Maas定律提出一种基于分段式带放电的快速充电策略,即在不同阶段采用不同充电方法的充电策略,把充电分为三个阶段,第一个阶段为预充电阶段,当电池电量很少时用大电流对电池进行充电很容易损坏电池,故在电池SOC小于10%时采用小电流恒流充电来保护电池;第二个阶段是快速充电阶段,当电池SOC大于10%小于80%时采用分段恒流充电,作用是在短时间内尽快地对电池进行无损充电;当电池SOC达到80%时进入第三阶段,第三阶段是恒压正负脉冲充电阶段,此阶段电池极化严重,所以在此阶段采用恒压正脉冲充电,同时加入去极化负脉冲。整个过程中电流、电压控制量输出的大小由控制系统根据预先设定值与所采集到的电池端电压和充电电流等信息通过算法整定而确定,整个充电过程的示意图如图1所示。
在电池充满电后如果不及时停止充电,电池的电压甚至会出现负增量,同时内压和温度会迅速上升,对电池产生很大的损害。因此必须采用一定的控制方法来控制充电终止,现阶段主要有电压控制法、定时控制法和温度控制法等几种方法来控制充电的终止。为了更可靠地保证在将电池充足情况下不过充,结合以上几种方法,设计一种时间、温升和电压负增量控制的综合控制方法,表达式如下:
(1)
其中,t为充电时间,Tmax为最长允许充电时间,T为温度,Tmax为最高允许温度,du/dt为电池电压增量。
2 系统硬件设计
2.1 主电路硬件控制系统的设计
充电桩的输入选择三相工频交流电源(380 V/50 Hz),由于要分阶段充电,所以输出电流和电压的范围要相对大一些,输出电流范围为0~150 A,输出电压范围为0~500 V。主电路由输入滤波整流电路、逆变电路以及放电电路几部分组成。采用三相桥式整流,主要作用是通过电容Ca和电感La进行滤波,把输入的三相工频交流电源(380 V/50 Hz)整流成直流电源输出,实现AC-DC变换,三相整流滤波电路如图2所示。
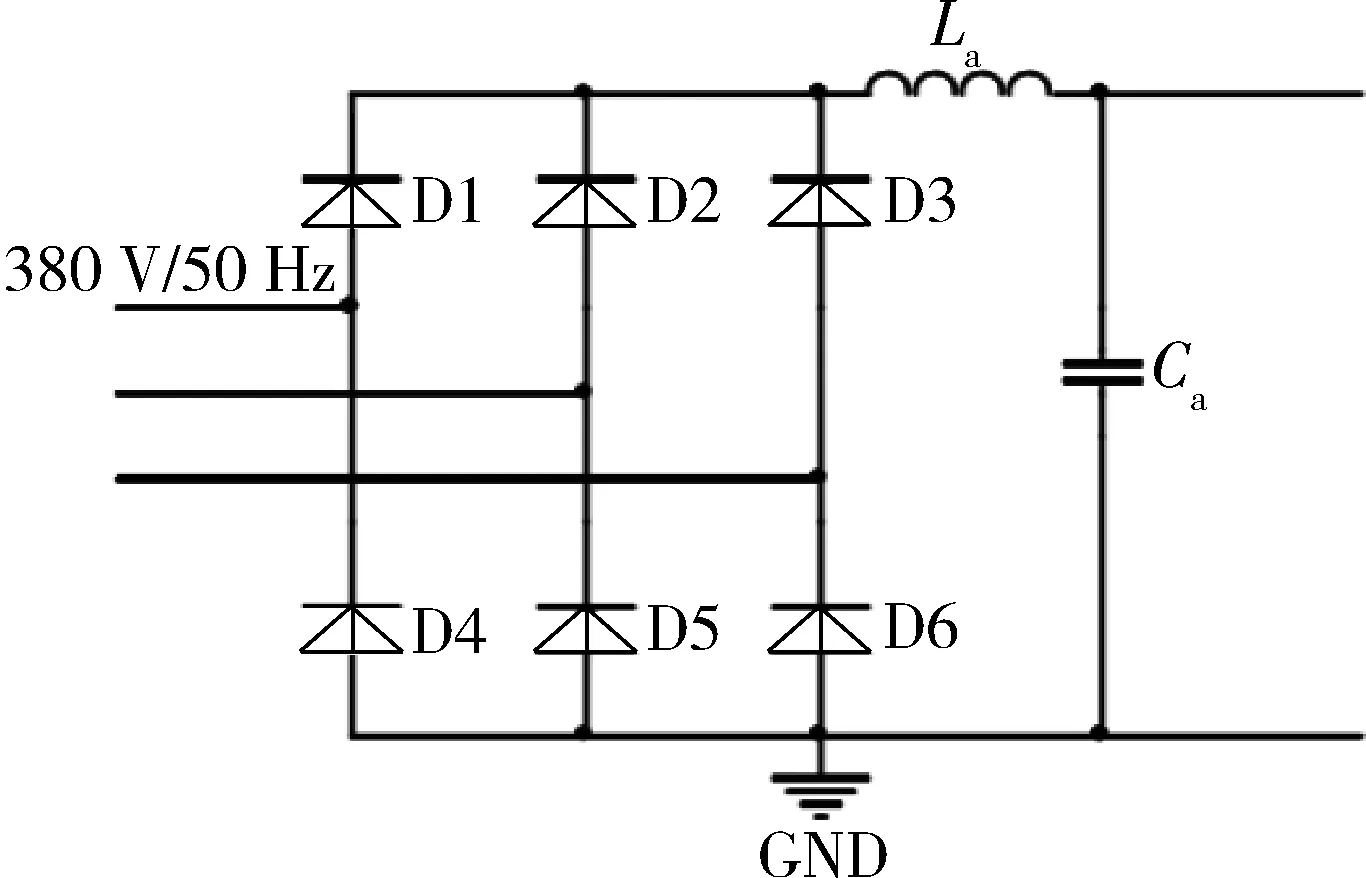
图2 三相整流滤波电路图
逆变电路通过Q1、Q2、Q3和 Q4四个IGBT 管将输入滤波整流电路输出的直流电转化为高频脉冲交流电,并通过高频变压器降压。通过整流得到所需直流电压,其大小由高频变压器的原副边的匝数比和四个IGBT管的通断时间共同决定,此电路实现了DC-AC-DC的转换[5],如图3所示。

图3 全桥逆变电路图
放电去极化电路通过TLC5615把单片机的数字控制信号转化为模拟信号来控制Q5,使电池以指定电流放电,从而消除锂电池充电过程中的极化现象。输出整流与滤波电路再对电压进行整流滤波,然后接到电池组的两端对电动汽车充电,如图4所示。
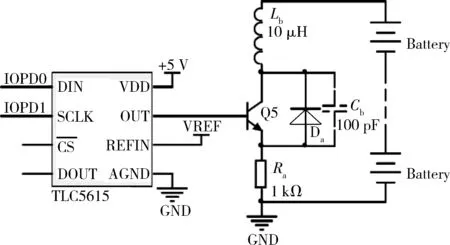
图4 放电去极化电路
控制系统接受控制指令并发送到充电桩的PWM脉宽调制逆变电路,通过调节IGBT开关管的导通时长和关闭时长来控制电池输出电压、电流的大小。整个控制系统以MSP430F149单片机为核心[6],该单片机是一个功耗低、误差小、采样速度快且指令集精简的16位混合型单片机,单片机原理图如图5所示。
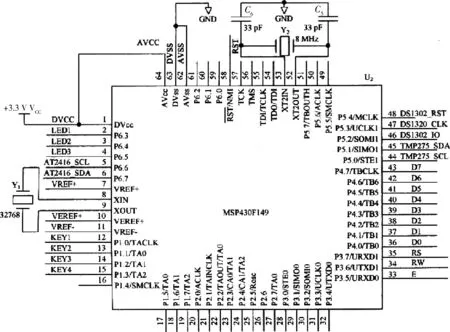
图5 单片机原理图
2.2 信号采集及系统保护的设计
充电桩进行充电时靠其当前的运行状态极来判断运行是否正常,因此要及时准确地通过信息采集电路来得到当前的运行状态。通过信息采集电路采集的信息对充电桩进行过流保护、过压保护、过温保护、短路保护以及风扇堵转和继电器动作保护等,并通过可编程逻辑门电路将信息传送到单片机并进行故障显示,其中控制器通过调节电路对电流和电压进行调节,整个过程信号输入及故障保护原理图如图6所示。
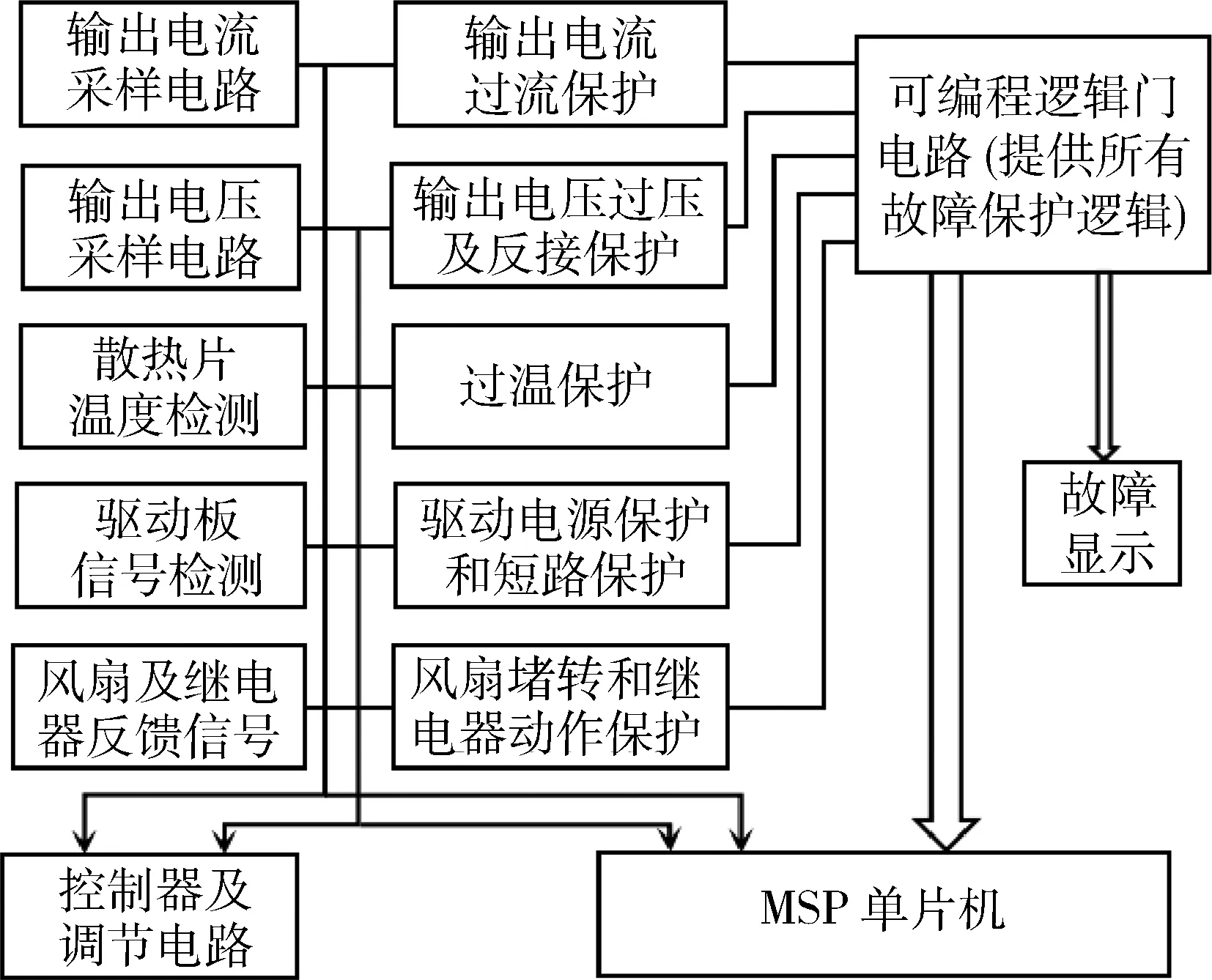
图6 信号输入及故障保护原理图
3 控制系统软件设计及仿真
3.1 充电过程的软件设计
控制器通电后先进行故障自检,如果有禁止启动的故障则故障报警并对故障进行处理,直到没有禁止启动故障则开始与电动汽车的电池管理系统进行通信,检测电池的类型、容量、端电压以及电池的SOC等数据,接着进行数据处理并确定充电参数,开始对电池进行充电。检测电池SOC信息,如果SOC<10%则进入第一阶段充电,当SOC>10%后开始进行第二阶段充电,当SOC达到80%后进入第三阶段充电。并在充电过程中实时检测电池温度、电压以及充电时间,当满足停止充电的条件后结束充电,整个充电过程的流程图如图7所示。
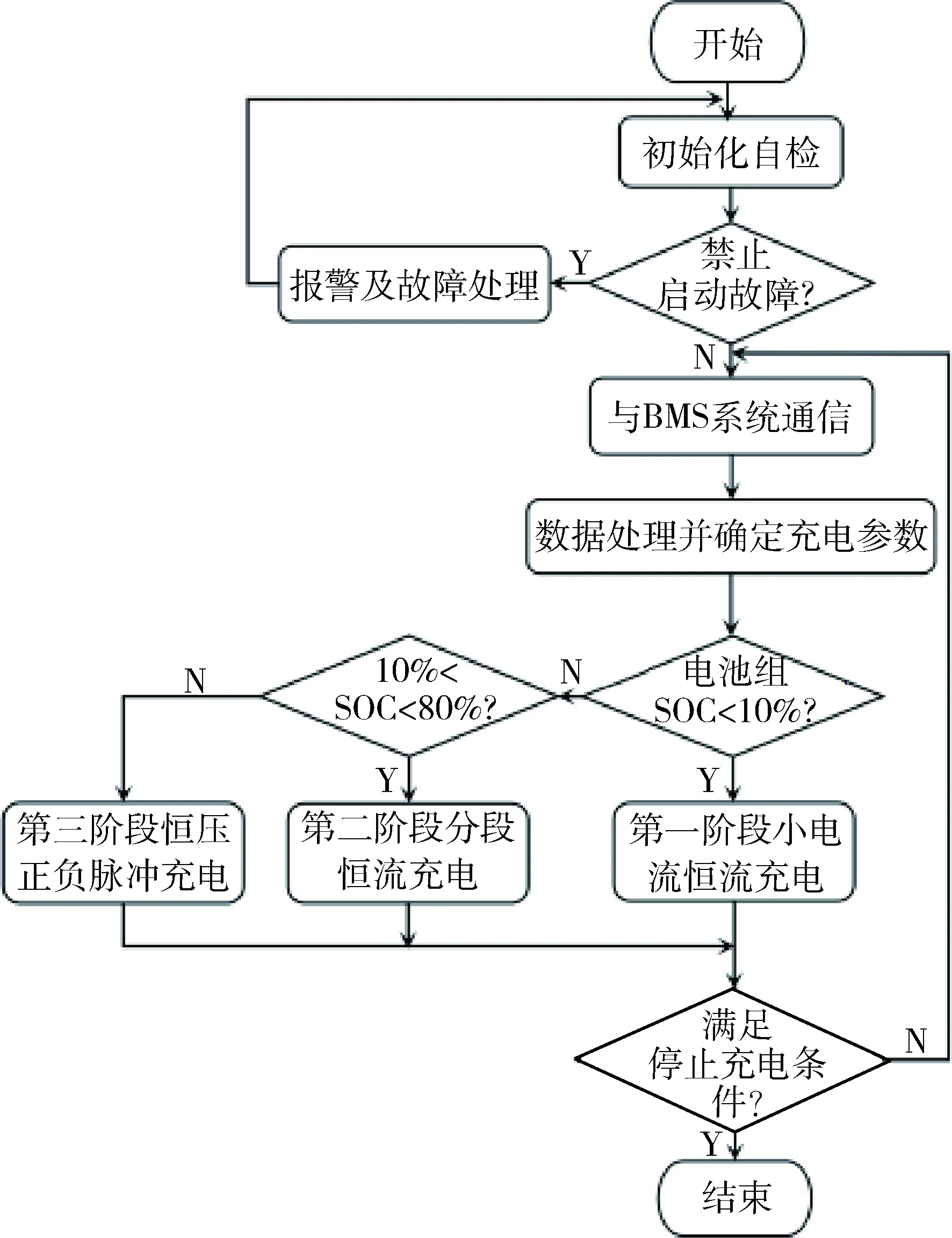
图7 充电过程流程图
3.2 控制算法的分析与设计
PID控制因为不能在线调节,对于非线性、时滞大和惯性大的复杂控制系统效果不理想。模糊控制能提高控制系统的适应能力以及鲁棒性,但设计通用的模糊规则时,难以避免导致系统动静态品质变差。基于此,结合免疫反馈和模糊控制,设计一种串联模糊免疫自适应PID控制器的充电控制系统,原理图如图8所示。
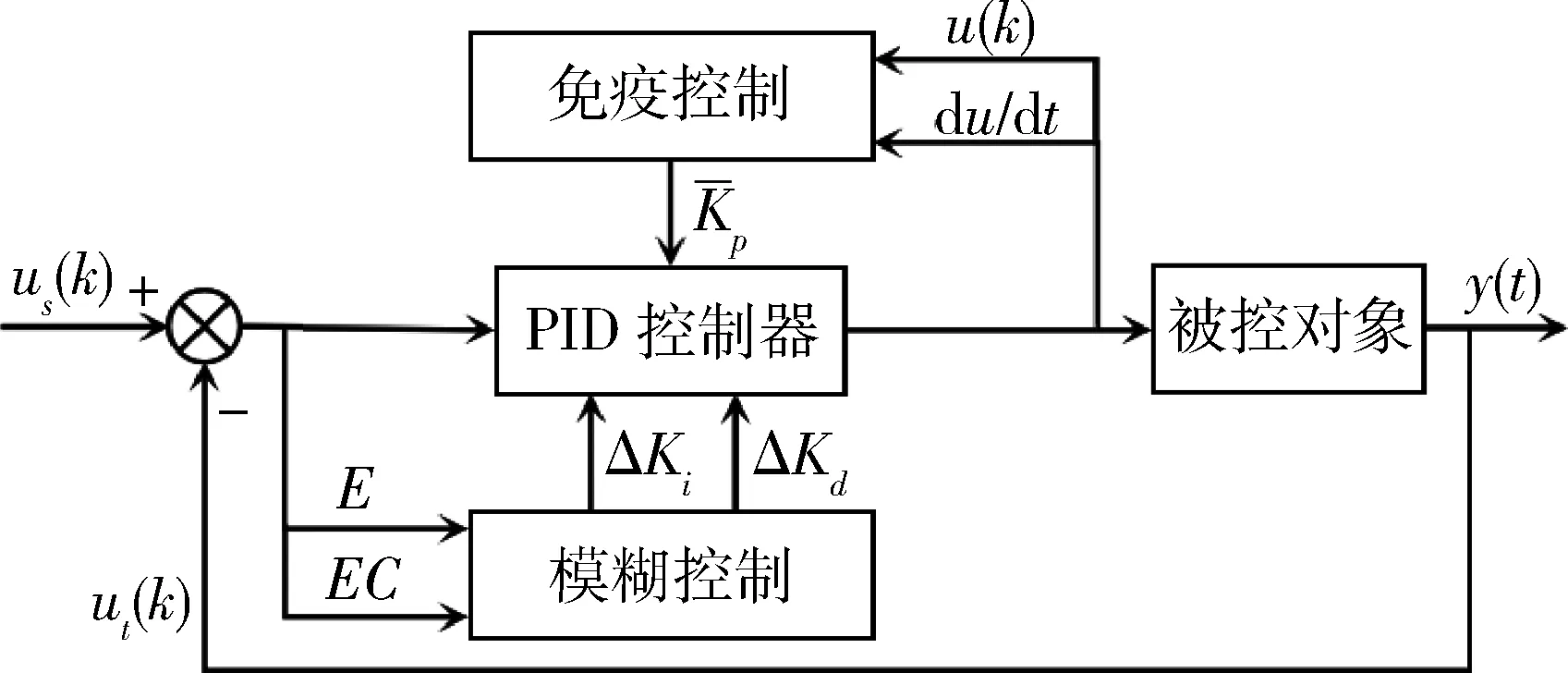
图8 控制系统原理图

根据免疫反馈机制,假设抗原通过k代分裂后数量为ε(k),TH细胞受到抗原刺激后输出定义为TH(k),TS细胞受到抗原刺激后产生的抑制为TS(k),可得出B细胞受到的总激励S(k)以及B细胞受到的激励误差变化量ΔS(k)为[7]:
S(k)=TH(k)-TS(k)
(2)
ΔS(k)=S(k)-S(k-1)
(3)
式中TH(k)=k1ε(k),TS(k)=k2f(S(k),ΔS(k))ε(k),k1、k2分别为刺激和抑制分子。
免疫响应是通过快速消除抗原来使免疫系统稳定,并降低抗体浓度,消除由于抗体浓度大,而对生物体产生的毒害,使生物体受到的总伤害最小,而控制系统的动态调节过程是快速消除偏差。
控制输入u(k)相当于B细胞接收的刺激S(k),偏差e(k)相当于抗原的数量ε(k),则可得到反馈控制规律[8]:

(4)
式中,η=k1/k2用来控制稳定,K=k1用来控制速度,f(u(k),Δu(k))是关于u(k)和Δu(k)的一个非线性函数。
传统PID常规控制算法的算式为:
u(k)=u(k-1)+Kp(e(k)-e(k-1))+Kie(k)+Kd(e(k)-2e(k-1)+e(k-2))
(5)
把免疫反馈机理应用到控制器中,可得到模糊免疫自适应控制器的输出为:
u(k)=u(k-1)+K(1-ηf(u(k),Δu(k)))(1+(e(k-1)))+Kie(k)+Kd(e(k)-2e(k-1)+e(k-2))
(6)
在模糊自适应控制环节,输入变量为E和EC,模糊集的语言为{NB,NS,ZO,PS,PB},意义为{负大,负小,零,正小,正大},隶属函数选用三角函数,应用mom反模糊化方法和Mamdani模糊推理法,得到输出变量为ΔKi和ΔKd,且ΔKi和ΔKd的系数为:
Ki=Ki(0)+ΔKi
(7)
Kd=Kd(0)+ΔKd
(8)
式中Ki(0)和Kd(0)分别为Ki和Kd的初始值。
将以上免疫控制和模糊自适应控制相结合得到模糊免疫自适应PID控制系统,其控制式为:
u(k)=u(k-1)+K(1-ηf(Δu(k)))(e(k)+e(k-1))+(Ki(0)+ΔKi)e(k)+(Kd(0)+ΔKd)(e(k)-2e(k-1)+e(k-2))
(9)
3.3 模型的建立与仿真
充电桩充电时,单片机与辅助电路连接,构成控制电路,执行机构为整流变换电路,对被控对象电动汽车电池组进行控制,从而构成充电桩的整个控制系统,整体结构图如图9所示。

图9 充电桩整体结构图
由于三相电压不易调整,所以在建立模型时将电动汽车电池组和整流电路看成一个整体来建模[9]。根据蓄电池的特性,把蓄电池看成是由小电阻和大电容串联而成的,然后再与整流电路的小电感串联构成被控对象,并且带有一定延迟时间,建立被控对象的数学模型为:
(10)
在模糊免疫控制环节,控制系统采用双输入单输出,输入量分别为u和Δu,用正(P)、负(N)两个模糊量表示,语言值都定义为{N,P},u论域为[-10,10],Δu的论域为[-1,1],隶属度函数都选用z函数和s函数。输出为f(S(k),ΔS(k)),用正(P)、零(Z)和负(N)3个模糊量表示,语言值定义为{N,Z,P},论域为[-1,1],隶属度函数选用三角函数、z函数和s函数。在模糊自适应控制环节,控制系统采用双输入双输出,输入变量为E和EC,模糊集的语言为{NB,NS,ZO,PS,PB},论域为[-4,4],隶属函数选用三角函数,输出变量为ΔKi和ΔKd,模糊集的语言值为{NB,NS,ZO,PS,PB},论域为[-1,1],隶属函数选用三角函数。
根据以上各个输入变量的论域及隶属度函数,通过控制规则,得出相应的输出量。从而可以推断出模糊免疫自适应PID控制中Kp、Ki和Kd三个量决策表,并将决策表固化到程序存储器中,单片机可以在充电过程中提取以上3个控制量,并结合控制器进行微调。将传统PID控制、模糊PID控制以及模糊免疫自适应PID控制进行仿真对比。
当给定电流为50 A,在3个控制器的作用下的电流仿真结果如图10所示。从图中可以看出,模糊免疫自适应PID控制系统比传统PID控制以及模糊PID控制的稳定性更强,超调量更小,反应速度更快。
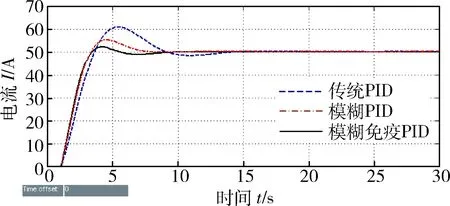
图10 电流对比仿真模型图
充电过程中,外界干扰在所难免。在20 s时添加阶跃扰动,仿真结果如图11所示。由图可以看出,加入扰动时模糊免疫自适应PID控制系统抗干扰性更强。

图11 扰动下电流对比仿真模型图
4 结束语
本文设计了一种三段式的快速充电方法,并结合免疫反馈和模糊控制,设计了一种模糊免疫自适应PID控制器的充电控制系统。建立模型并进行仿真,通过与传统PID控制以及模糊PID控制的对比,得出该控制系统稳定性更强,超调量更小,反应速度更快,加入扰动时模糊免疫自适应PID控制系统抗干扰性更强。
[1] 王迎迎,冯冬青,赵洪蕊.通用型电动汽车蓄电池智能充电机设计[J].电源技术,2011,35(8):922-955.
[2] 唐超,曹龙汉,何俊强,等.基于模糊控制的锂动力电池快速充电技术研究与实现[J].苏州大学学报(工科版),2012,32(1):1-5.
[3] 罗映红,徐志奇,刘丽媛,等.耦合模糊PID控制的蓄电池充电研究[J].电源技术,2013,37(5):749-752.
[4] 余文正.动力电池模型分析及其快速充放电策略研究[D].成都:电子科技大学,2013.
[5] CHUANG Y C, KE Y L, CHUANG H S, et al. Implementation and analysis of an improved series-loaded resonant DC-DC converter operating above resonance for battery chargers [J].IEEE Transactions on Industry Applications,2009,45(3):1052-1059.
[6] 汤金萍,周雷,金阿锁.基于MSP430单片机的四旋翼飞行器控制系统设计[J].微型机与应用, 2016,35(20):9-12.
[7] 孙安全,潘永雄,苏成悦.铅酸蓄电池智能快充的电路设计[J].微型机与应用,2015,34(17):21-24.
[8] CHIANG S J, SHIEH H J, CHEN M C.Modeling and control of PV charger system with SEPIC converter[J].IEEE Transactions on Industrial Electronics,1999,56(11):4344-4353.
[9] 肖蕙蕙,王志强,李山,等.电动汽车动力锂离子电池建模与仿真研究[J].电源学报,2012,10(1):41-44.
The design of control system of electric vehicle charging pile
Wang Haiqun, Peng Chuan
(College of Electrical Engineering, North China University of Science and Technology, Tangshan 063210, China)
Aiming at the slow charging speed of electric vehicle and the instability of charging pile control system, the intelligent charging control system of electric vehicle charging pile based on MSP430F169 single chip microcomputer is designed, and the hardware circuit and software design of the system are expounded.And a three-stage variable pulse charging method with discharge depolarization is designed to improve the charging speed while eliminating the polarization caused by fast charging. At the same time, combined with immune feedback and fuzzy control, a fuzzy immune adaptive PID controller is designed to improve the control performance.The control performance of the fuzzy immune adaptive PID control system is greatly improved by simulation and compared with the traditional PID and fuzzy PID control performance.
charging-pile; charging method; control system; fuzzy immune; PID control
TP273
A
10.19358/j.issn.1674- 7720.2017.23.031
王海群,彭川.电动汽车充电桩控制系统的设计[J].微型机与应用,2017,36(23):107-111.
2017-07-10)
王海群(1968-),女,硕士,副教授,硕士生导师,主要研究方向:电气自动化及控制理论在控制过程中的应用。
彭川(1991-),男,在读硕士,主要研究方向:检测技术及智能装置。
