航磁全轴总场梯度系统补偿算法研究
2017-12-16吴佩霖张群英刘丽华方广有
吴佩霖 张群英 李 光 刘丽华 方广有
航磁全轴总场梯度系统补偿算法研究
吴佩霖①②③张群英*①③李 光①②③刘丽华①③方广有①③
①(中国科学院电磁辐射与探测技术重点实验室 北京 100190)②(中国科学院大学 北京 100049)③(中国科学院电子学研究所 北京 100190)
航空磁法勘探是一种高效、便捷的地球物理勘探方法。使用多个光泵磁力仪实现全轴梯度测量是航空磁法勘探中的一种重要手段。该文针对无人机飞行平台设计了一种航磁全轴总场梯度测量系统,并提出使用前馈网络的方法来实现航磁数据的补偿。系统通过4个光泵磁力仪获得全轴总场梯度数据,经过前馈网络实现数据补偿后,全轴总场梯度数据补偿质量的提升比分别为15.2, 4.7和5.9,数据峰值信噪比的提升分别为17.1 dB, 6.5 dB和6.5 dB,交叉标定系数表明前馈网络具有很好的泛化性能。实验结果验证了该文采用的全轴梯度系统和数据补偿方法的正确性和有效性,能够有效地应用于高精度航磁勘探领域。
地球物理勘探;全轴磁总场梯度;航磁补偿;光泵磁力仪;无人直升机
1 引言


本文研究了基于无人直升机飞行平台的航磁全轴总场梯度系统和飞机干扰磁场对全轴总场梯度数据的影响,研制了一套航磁全轴梯度系统,并提出了一种基于前馈网络的补偿算法,成功实现了飞机干扰磁场的去除。该套基于无人直升机平台的全轴总场梯度勘探系统在潍坊昌邑铁矿区进行了航磁勘探验证飞行,结果表明,本文采用的航磁全轴梯度系统和提出的补偿算法能有效实现数据的采集和飞机干扰磁场的补偿,实现高精度的航磁勘探作业。
2 航磁系统及航磁补偿
2.1 航磁全轴总场梯度系统
基于无人直升机的航磁全轴总场梯度系统采用铝制桁架搭载4个高精度光泵磁力仪和一个三轴矢量磁力仪实现,如图1所示。其中桁架前端的两个光泵磁力仪a, b测量垂直方向航磁总场梯度,左右弦的两个光泵磁力仪c, d测量横向航磁总场梯度。前端和两弦光泵磁力b, c和d用于测量纵向航磁总场梯度。
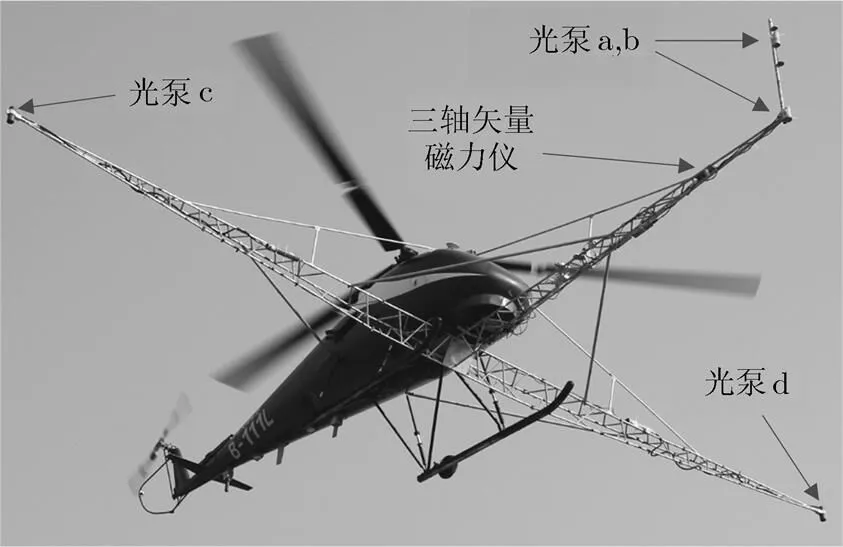
图1 无人机航磁全轴总场梯度系统
通过对光泵磁力仪测量的航磁总场数据差分可得到对应的总场梯度数据,三轴梯度的表达式为
2.2 航磁总场梯度的补偿原理
光泵磁力仪与桁架固联,在飞机飞行过程中光泵磁力仪受到的干扰磁场可以通过航磁补偿模型建模,任一探头位置处的干扰磁场可表示为
3 前馈网络补偿算法
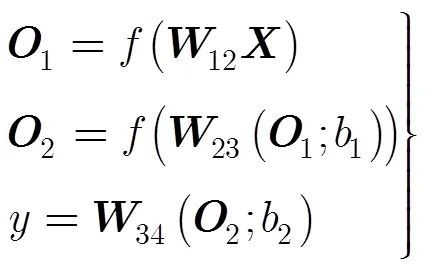
近些年随着GPU并行计算和相关理论模型的发展以及大规模网络训练方法速度的提升,神经网络获得了极大的发展。根据待处理问题的不同,网络具有不同的结构,其中前馈网络具有分层结构,数据进入输入层后经过网络逐层传播至输出层,适用于高维回归问题,在航磁补偿问题中,合理地设计前馈网络结构和网络参数,可以较好地实现飞机干扰的去除。本文提出采用前馈网络来实现全轴梯度数据的补偿。
前馈网络的网络结构如图2所示,其中隐层数量以及隐层节点数量根据实际问题进行调整,一般层数和节点数量越大,网络的训练计算越慢,回归预测精度相对越高。针对航磁全轴总场梯度补偿问题,实测数据的实践结果表明:采用两个隐层,每层计算节点1024个,可以很好地兼顾训练速度和补偿数据的精度。
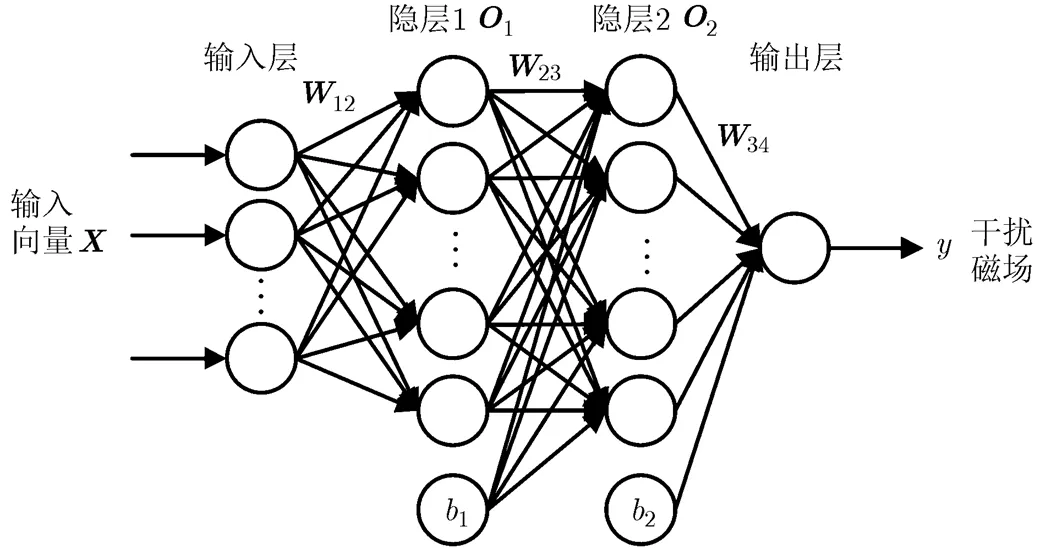
图2 网络结构图
网络采用ReLU作为激活函数,其表达式为

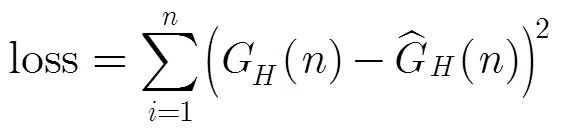
在前馈网络计算中,由于采用的网络节点规模较大,需要防止过拟合现象的发生,通过正则化的方式来避免网络出现过拟合,式(7)代价函数可以改写为

前馈网络应用于全轴总场梯度数据补偿时的处理流程图,如图3所示。
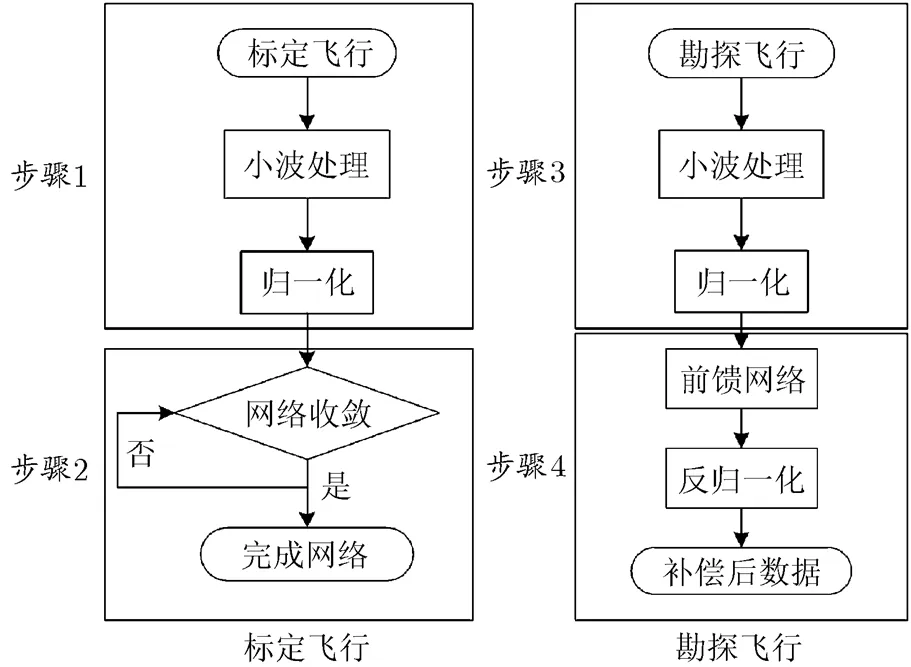
图3 算法流程图
具体的步骤如下:
步骤1 对标定飞行数据进行预处理操作,通过二进小波变换去除信号中高频噪声,保留位于同一频带的飞机磁干扰和地质磁异常信号。由三轴磁力仪的输出获得恒定磁干扰、感应磁干扰和涡流磁干扰组成的输入向量。
其中恒定磁干扰的对应的特征向量为

感应磁干扰形成的特征向量为
涡流磁干扰形成的特征向量为
将式(9)、式(10)和式(11)组合获得网络的输入向量,表达式为

进一步将三轴磁力仪和光泵的数据归一化,避免非归一化数据由于自身幅值过大影响部分网络节点的取值,导致网络泛化性能下降甚至不收敛。归一化操作的表达式为
步骤2 将步骤1中归一化后的数据送入建立好的前馈网络进行训练。由于全轴磁总场梯度3个方向数据不同,数据结构相似,因此采用3个结构相同的网络处理,网络采用后向传播算法迭代计算最优解,直到代价函数式(8)收敛到预期值,认为获得收敛后的网络,该网络将在步骤4中作为补偿网络;
步骤3 对勘探飞行数据进行预处理操作,通过二进小波变换,去除信号中高频噪声和直升机旋翼混叠频率,并对三轴磁力仪和光泵的数据执行步骤1中归一化;
步骤4 步骤2中获得的收敛网络作为补偿网络,将步骤3中预处理后的数据送入网络计算,并将网络的输出数据做反归一化操作,获得补偿后的数据。
4 外场测试
4.1 实验设计
实验在山东昌邑铁矿区开展,全轴磁总场梯度系统的垂直向基线长度为1.2 m,水平向基线长度为10.2 m,纵向基线长度为6.0 m,用于测量飞机姿态的三轴矢量磁力仪传感器位于飞机桁架的前端。飞机的标定过程可以分为标定飞行和验证飞行,两者航迹采用矩形标定框,标定获得的数据对网络进行训练,验证飞行的数据对训练好的网络进行验证,评估网络的有效性及泛化能力。实验中飞行航迹如图4所示。
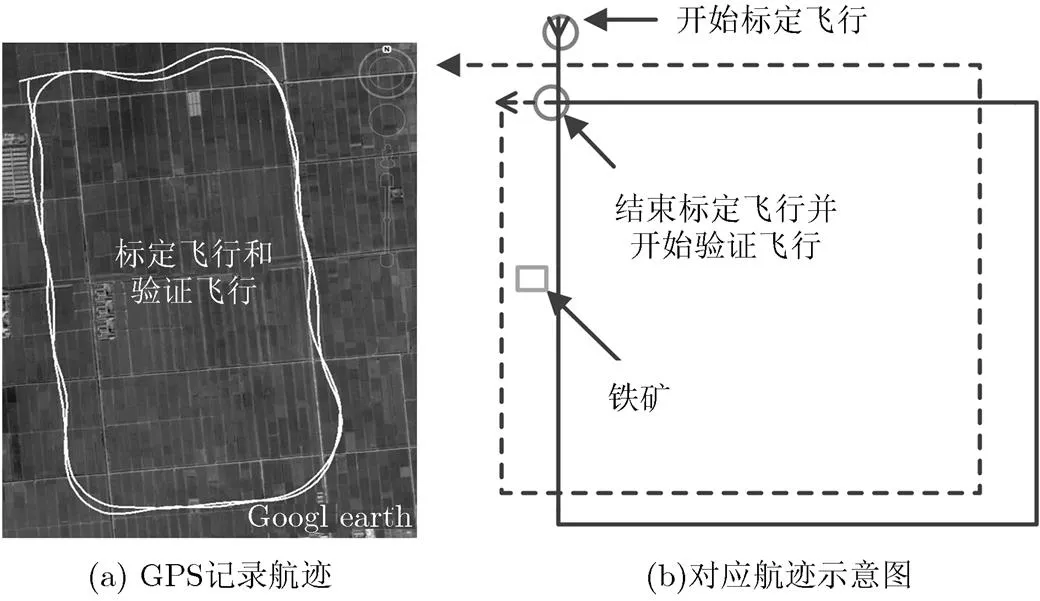
图4 标定飞行与验证飞行航迹
图4(a)为GPS记录的实际飞行航迹,图4(b)为图4(a)的示意简图,虚线表示标定飞行航迹,实线表示验证飞行航迹。

4.2 标定飞行结果分析
在实验中,受限于空域的申请和测区起降点的影响,该无人机全轴梯度系统的标定飞行受到一定的制约,标定飞行高度约为140 m,测线经过矿区,导致标定飞行数据中同时含有飞机磁干扰和测区磁异常信号。在前馈网络的补偿中,为了避免网络对矿区磁异常信号的拟合,对网络添加正则化因子如式(8)所示,通过弱化对标定飞行数据的拟合效果,达到提高网络的泛化能力的目的。
通过本文补偿方法处理,标定飞行和验证飞行的数据如图6所示。其中图6(a)是飞机的垂向梯度标定飞行数据,图6(b)是飞机垂向梯度验证飞行数据;图7(a)是飞机横向梯度标定飞行数据,图7(b)是飞机横向梯度验证飞行数据;图8(a)是飞机纵向梯度标定飞行数据,图8(b)是飞机纵向梯度验证飞行数据。其中实线是补偿前的数据,虚线是补偿后的数据。


图5 勘探飞行测线
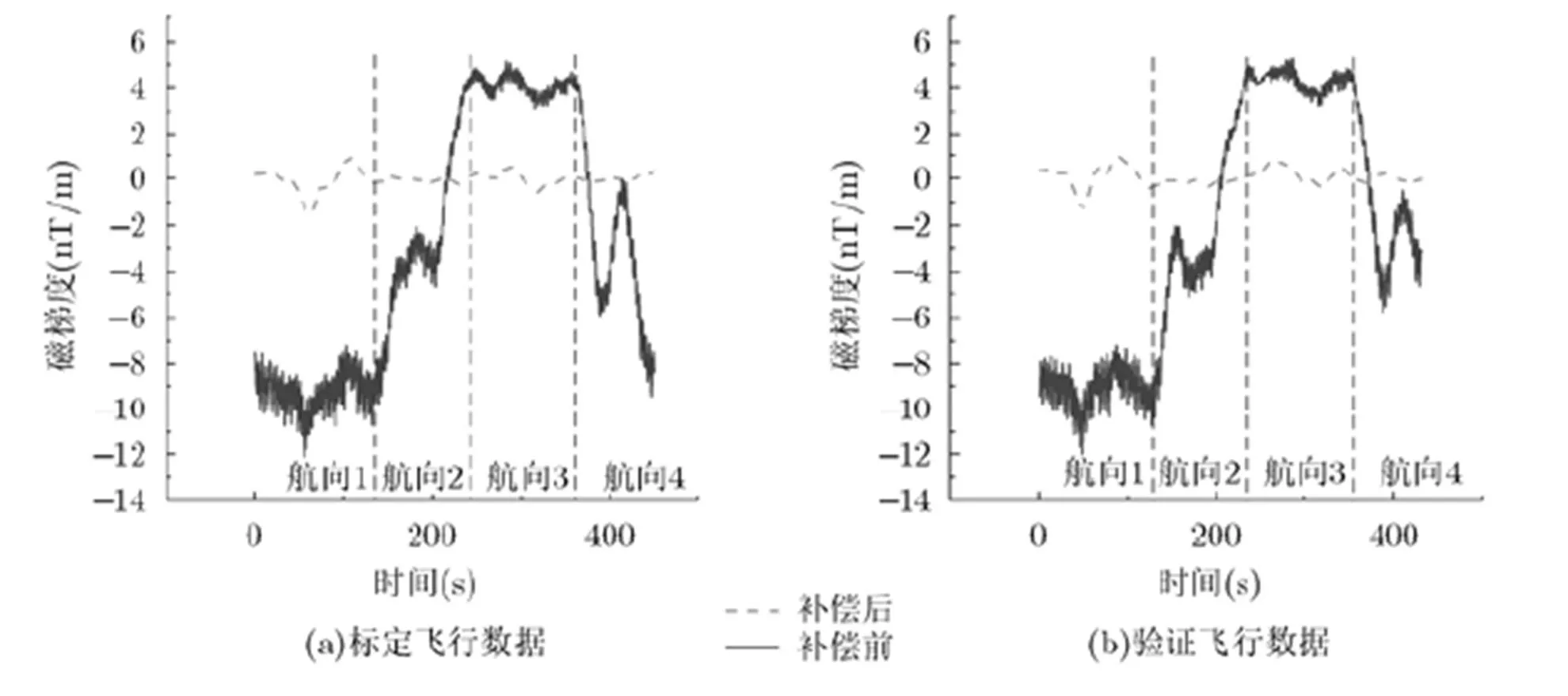
图6 垂向梯度
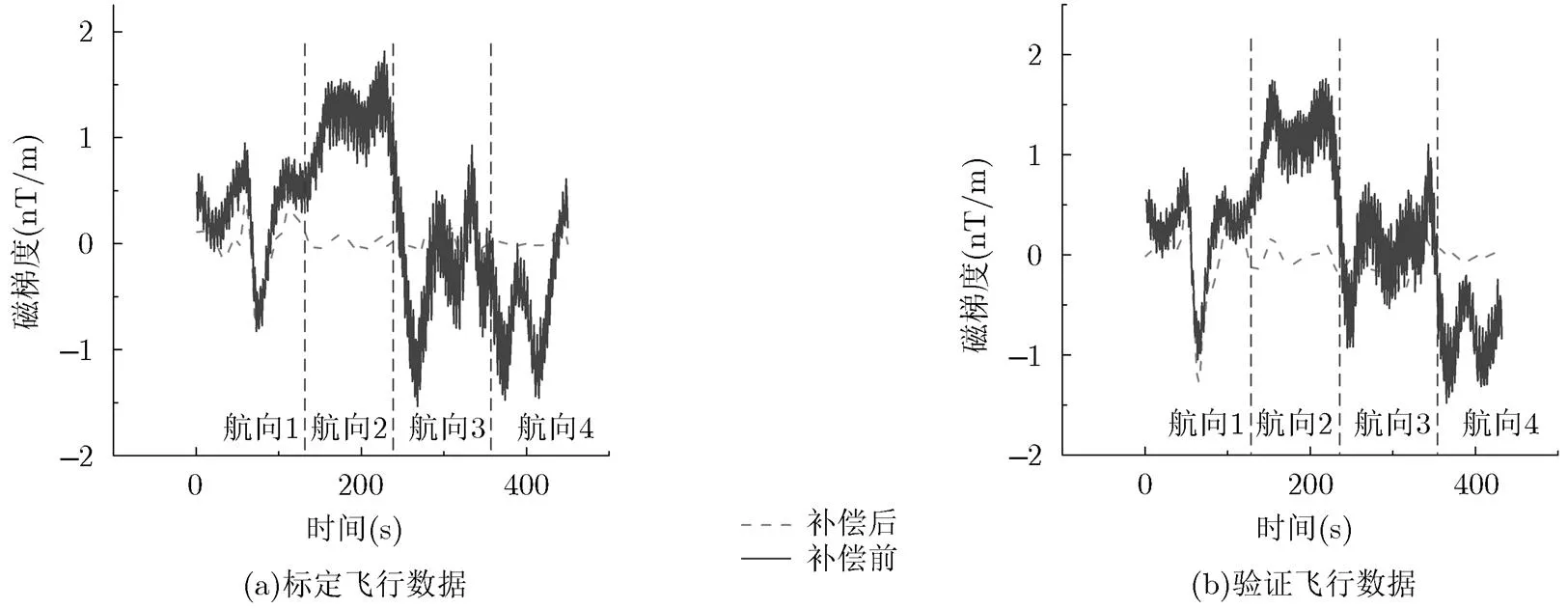
图7 横向梯度
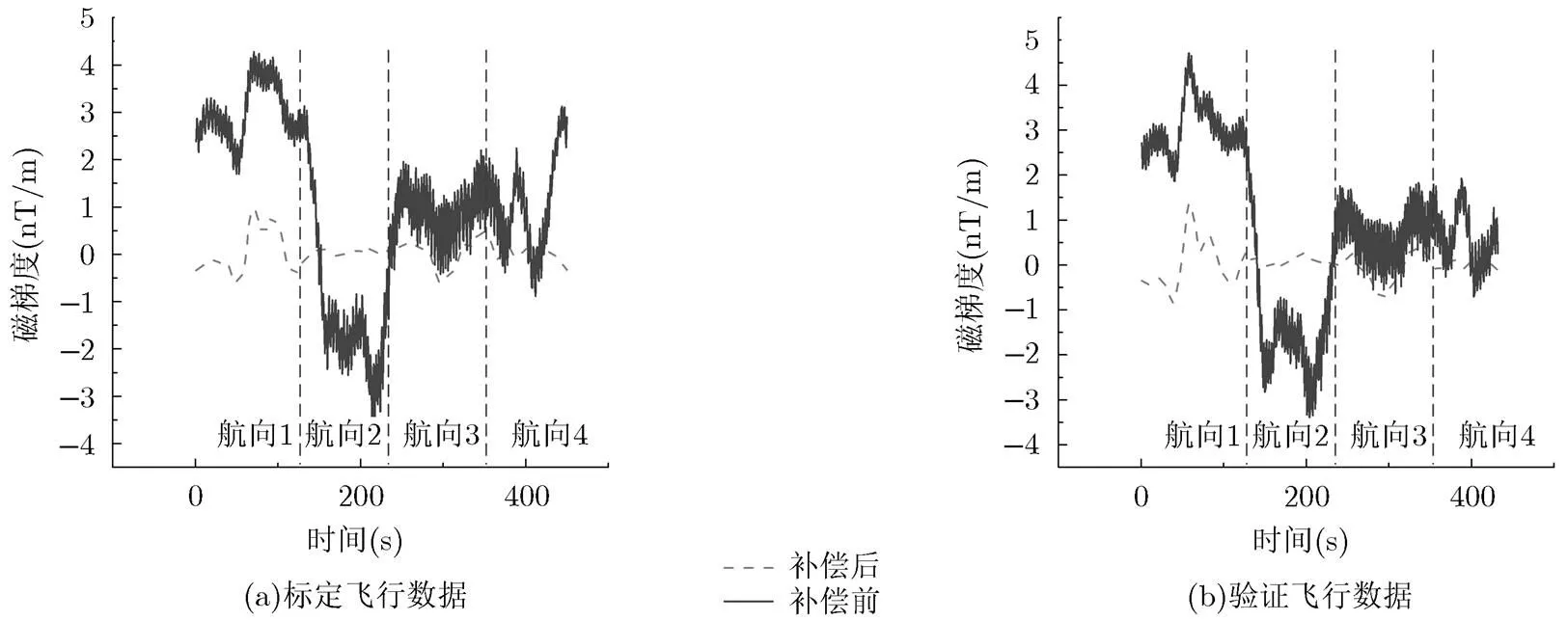
图8 纵向梯度
4.2.1信号的标准差和提升比 在航磁数据评估中,常见的评估标准为标准差和提升比评估标准,补偿信号的提升比定义为补偿前信号的标准差和补偿后信号的标准差的比值,其表达式为
标定飞行数据的标准差及信号提升比见表1所示。


补偿前(nT/m)补偿后(nT/m)IR 垂向梯度5.52470.363515.2 横向梯度0.72670.1548 4.7 纵向梯度1.75770.2997 5.9
通过网络实现补偿后,飞机的干扰磁场可以获得较好的抑制,全轴梯度数据质量的提升比分别为15.2, 4.7和5.9,数据质量有较好的提升。
4.2.2信号的峰值信噪比 由于矿区标定飞行采用IR评估具有一定的局限性,为了更准确地说明信号的提升幅度,在此采用峰值信噪比作为数据的评估标准。其表达式为
取0~100 s范围内,矿区信号作为有效信号的峰峰值,取整段标定飞行信号中最小抖动段的方差作为对信号噪声的估计,按式(15)计算信号的峰值信噪比。信号的PSNR结果如表2所示。

表2 PSNR结果(dB)
从表2中可见,通过网络补偿后,3个方向数据的PSNR的提升幅度分别为17.1 dB, 6.5 dB和6.5 dB,可见PSNR有着明显的提升,数据中的噪声获得了较好的抑制,局部地质磁异常信号得到了保留。

式(16)的对称表达式为
全轴梯度数据的交叉标定指数见表3所示。
表3交叉标定指数

垂向梯度1.02381.1633 横向梯度1.15211.1190 纵向梯度1.18421.0268
4.3 勘探飞行结果分析
无人机全轴梯度系统在标定过程后进行探勘飞行,飞机的航迹见图5所示。共11条测线。对测线数据进行2维成图,其结果见图9所示。
在原始数据成图中,存在较多的波纹、条带等干扰和噪声,无法有效地分辨地质磁异常信号。利用本文的补偿方法,使用标定飞行的数据获得稳定的补偿网络,对勘探飞行的数据进行补偿后,结果见图10所示。
对比图9和图10,定性分析可见,图中的条带和干扰被有效地移除,地质磁异常信号可清晰地从图中分辨。
定量评估中采用航磁规范中“航磁系统动态噪声”作为评估方法,实现对图9和图10中11条测线数据质量的评估。首先将数据降采样到航磁规范标准要求的2 Hz,采用式(18)计算系统动态噪声:
式中,

由表4定量结果可见,补偿后测线数据的系统动态噪声远低于补偿前测线数据的系统动态噪声,可见该补偿方法对数据质量的提升有重要的作用,在实际数据处理中具有可行性和有效性。
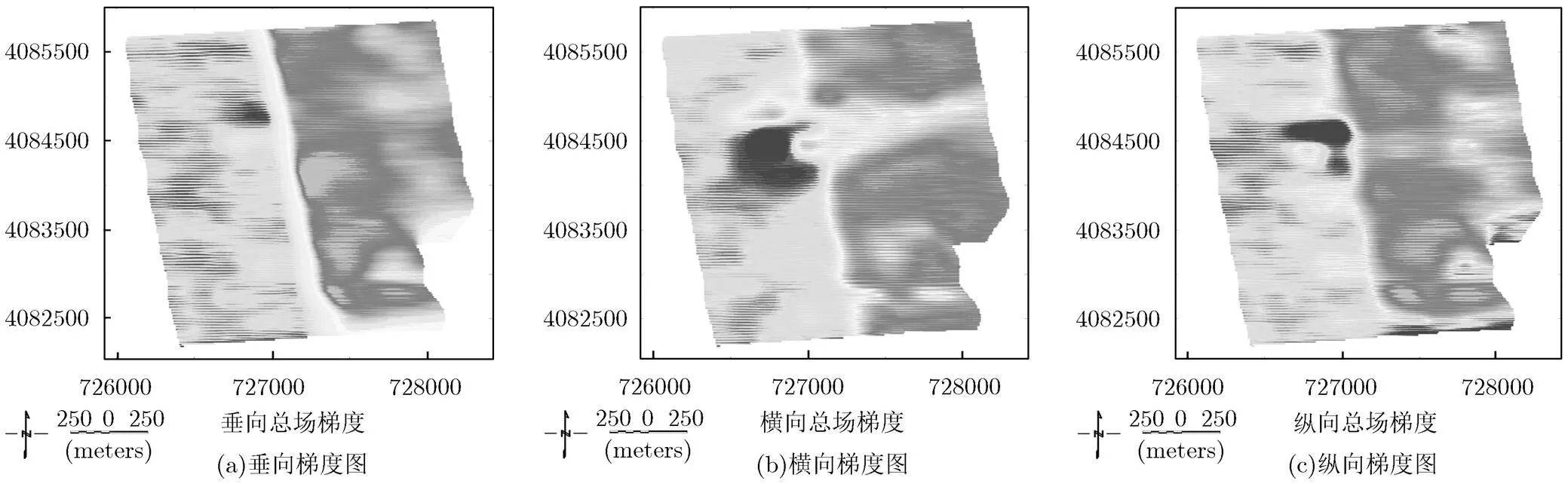
图9 原始数据成图
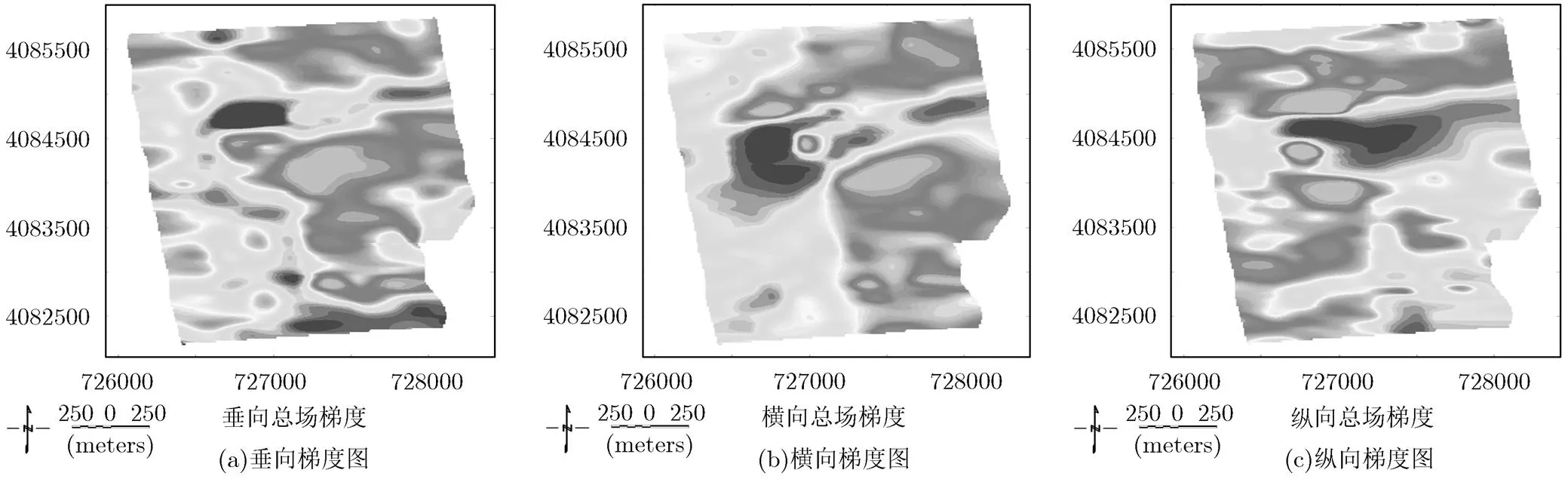
图10 补偿后数据成图
表4测线系统动态噪声(nT/m)
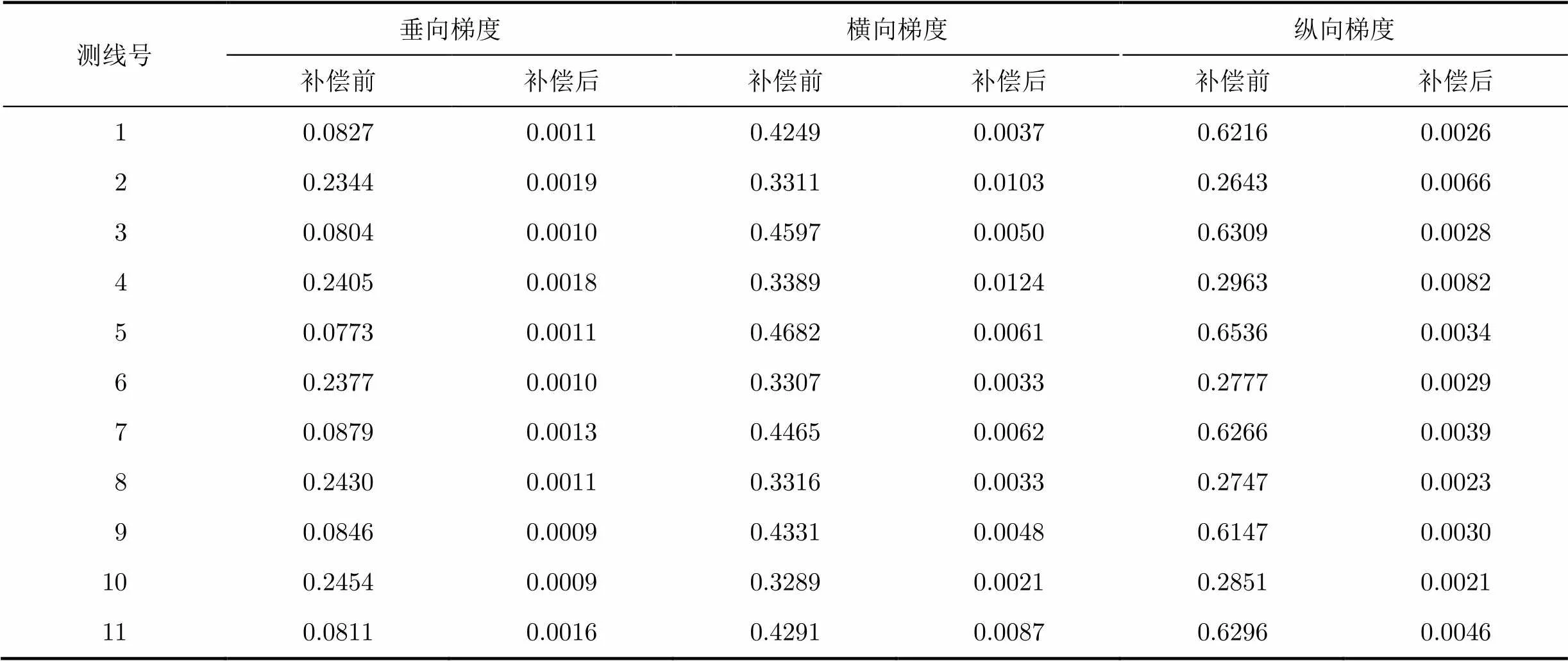
测线号垂向梯度横向梯度纵向梯度 补偿前补偿后补偿前补偿后补偿前补偿后 10.08270.00110.42490.00370.62160.0026 20.23440.00190.33110.01030.26430.0066 30.08040.00100.45970.00500.63090.0028 40.24050.00180.33890.01240.29630.0082 50.07730.00110.46820.00610.65360.0034 60.23770.00100.33070.00330.27770.0029 70.08790.00130.44650.00620.62660.0039 80.24300.00110.33160.00330.27470.0023 90.08460.00090.43310.00480.61470.0030 100.24540.00090.32890.00210.28510.0021 110.08110.00160.42910.00870.62960.0046
5 结论
本文设计了一种基于无人机的全轴梯度磁异常勘探系统,并提出使用前馈网络对无人机的磁干扰进行去除的方法。研究工作总结如下:(1)本文设计的基于无人机的全轴总场梯度系统可以稳定可靠地获得数据,实现航空全轴总场梯度磁法勘探,山东昌邑铁矿区的飞行实验证明了系统的可行性和有效性。(2)基于前馈网络的航磁补偿算法,通过标定飞行数据训练后具有较好的稳定性,以及泛化性能,能够有效地去除飞机的干扰磁场,保留局部地质磁异常信号。全轴总场梯度数据补偿质量的提升比分别为15.2, 4.7和5.9;峰值信噪比的提升分别为17.1 dB, 6.5 dB和6.5 dB,交叉标定指数符合补偿要求,实现对磁测数据的高质量补偿。矿区飞行实验结果表明了该补偿算法的正确性和有效性。
[1] NABIGHIAN M N, GRAUCH V J S, HANSEN R O,. The historical development of the magnetic method in exploration[J]., 2005, 70(6): 33ND-61ND. doi: 10.1190/1.2133784.
[2] HOOD P. History of aeromagnetic surveying in Canada[J]., 2012, 26(11): 1384-1392. doi: 10.1190/1. 2805759.
[3] DOLL W E, GAMEY T J, BELL D T,. Historical development and performance of airborne magnetic and electromagnetic systems for mapping and detection of unexploded ordnance[J].&, 2012, 17(1): 1-17. doi: 10.2113/ JEEG17.1.1.
[4] NORIEGA G. Aeromagnetic compensation in gradiometry- performance, model stability, and robustness[J].,2015, 12(1): 117-121. doi: 10.1109/LGRS.2014.2328436.
[5] HARDWICK C D. Non-oriented cesium sensors for airborne magnetometry and gradiometry[J].1984, 27(4): 266-267. doi: 10.1071/EG984266d.
[6] FORRESTER R, HUQ M S, AHMADI M,. Magnetic signature attenuation of an unmanned aircraft system for aeromagnetic survey[J]./, 2014, 19(4): 1436-1446. doi: 10.1109/TMECH. 2013.2285224.
[7] ZHANG B, GUO Z, and QIAO Y. A simplified aeromagnetic compensation model for low magnetism UAV platform[C]. IEEE Geoscience and Remote Sensing Symposium, Vancouver, BC, Canada, 2011: 3401-3404. doi: 10.1109/ IGARSS.2011.6049950.
[8] HARDWICK C D. Aeromagnetic gradiometry in 1995[J]., 1996, 27(1): 1-11. doi: 10.1071/ EG996001.
[9] NELSON J B. Aeromagnetic noise during low-altitude flights over the scotian shelf: DRDC-ATLANTIC-TM-2002-089[R]. Dartmouth NS: Defence Research & Development Canada Atlantic, 2002, 1-40.
[10] TOLLES W E and MINEOLA N Y. Compensation of aircraft magnetic fields[P]. US, Patent, US2692970, 1954.
[11] TOLLES W E and MINEOLA N Y. Magnetic field compensation system[P]. US, Patent, US2706801, 1955.
[12] LELIAK P. Identification and evaluation of magnetic-field sources of magnetic airborne detector equipped aircraft[J]., 1961, 8(3): 95-105. doi: 10.1109/TANE3.1961.4201799.
[13] LEACH B W. Aeromagnetic compensation as a linear regression problem[J]., 1980, 2: 139-161. doi: 10.1016/ B978-0-12-628750-9.50017-6.
[14] HARDWICK C D. Important design considerations for inboard airborne magnetic gradiometers[J]., 1984: 49(11): 2004-2018. doi: 10.1190/1.1441611.
[15] NELSON J B. Aircraft magnetic noise sources[C]. 8th International Congress of the Brazilian Geophysical Society, Brazilian, 2003: 41506.
[16] NELSON J B. Aeromagnetic noise from magnetometers and data acquisition systems[C]. 8th International Congress of the Brazilian Geophysical Society, Brazilian, 2003: 41507.
[17] NELSON J B. Predicting in-flight MAD noise from ground measurements: DREA-TM-2001-112[R]. Dartmouth NS: Defence Research Establishment Atlantic, 2002, 1-26.
[18] 骆遥, 段树岭, 王金龙, 等. AGS-863航磁全轴梯度勘查系统关键性指标测试[J]. 物探与化探, 2011, 35(5): 620-625.
LUO Yao, DUAN Shuling, WANG Jinlong,. Key indicators testing for AGS-863 three axis airborne magnetic gradiometer[J]., 2011, 35(5): 620-625.
[19] 骆遥, 吴美平. 位场向下延拓的最小曲率方法[J]. 地球物理学报, 2016, 59(1): 240-251. doi: 10.6038/cjg20160120.
LUO Yao and WU Meiping. Minimum curvature method for downward continuation of potential field data[J]., 2016: 59(1): 240-251. doi: 10.6038/ cjg20160120.
[20] 王林飞, 薛典军, 段树岭, 等. 航磁软补偿动作规范性评价[J]. 物探与化探, 2016: 40(2): 365-369. doi: 10.11720/wtyht.2016. 2.21.
WANG Linfei, XUE Dianjun, DUAN Shuling,. The normative evaluation of aeromagnetic compensation action[J]., 2016: 40(2): 365-369. doi: 10.11720/wtyht.2016.2.21.
[21] 赵建扬, 林春生, 贾文抖, 等. 直升机平台背景磁干扰建模与求解[J]. 华中科技大学学报(自然科学版), 2016, 44(2): 21-25. doi: 10.13245/j.hust.160205.
ZHAO Jianyang, LIN Chunsheng, JIA Wendou,Helicopter platform background magnetic interference modeling and solution[J].(), 2016, 44(2): 21-25. doi: 10.13245/j.hust.160205.
[22] 赵建扬, 林春生, 孙玉绘, 等. 直升机平台背景磁干扰建模与特性分析[J]. 海军工程大学学报, 2016, 28(1): 36-40. doi: 10.7495/j.issn.1009-3486.2016.01.008.
ZHAO Jianyang, LIN Chunsheng, SUN Yunhui,Modeling and characterization of helicopter platform background magnetic interference[J]., 2016, 28(1): 36-40. doi: 10.7495/ j.issn.1009-3486.2016.01.008.
[23] 张宁, 赵建扬, 林春生, 等. 直升机平台背景磁干扰小信号模型求解与补偿[J]. 电子学报, 2017, 45(1): 83-88. doi: 10.3969/ j.issn.0372-2112.2017.01.012.
ZHANG Ning, ZHAO Jianyang, LIN Chunsheng,Helicopter platform background magnetic interference small signal model solving and compensation[J]., 2017, 45(1): 83-88. doi: 10.3969/j.issn.0372-2112.2017. 01.012.
吴佩霖: 男,1988年生,博士生,研究方向为航磁数据补偿算法及数据处理.
张群英: 女,1972 年生,研究员,博士生导师,研究方向为微波探测技术领域的新方法、新技术及新应用研究、微波成像信号处理与成像方法.
李 光: 男,1987 年生,博士生,研究方向为电磁勘探算法及数据处理.
刘丽华: 女,1981 年生,副研究员,研究方向为探地雷达及大功率发射机.
方广有: 男,1963 年生,研究员,博士生导师,研究方向为超宽带电磁学理论及其应用、超宽带成像雷达技术、太赫兹成像新方法、新技术.
Research on Compensation Algorithm of Three AxisGradient Aeromagnetic Prospecting System
WU Peilin①②③ZHANG Qunying①③LI Guang①②③LIU Lihua①③FANG Guangyou①③
①(,,100190,)②(,100049,)③(,,100190,)
Aeromagnetic prospecting is an important method in geophysical prospecting for its high-efficiency and convenience. In the paper, a new kind of the three axis gradient system based on the unmanned helicopter is designed and an aeromagnetic compensation method based on the neural network is proposed. The system is equipped with four Optically Pumped Magnetometers (OPMs), from which the three axis gradient data can be achieved. In aeromagnetic compensation, the feedforward network is used. The Improvement Ratio (IR) of the three axis gradient data is 15.2, 4.7 and 5.9, respectively. The Peak Signal to Noise Ratio (PSNR) of the three axis gradient data is improved by 17.1 dB, 6.5 dB and 6.5 dB, respectively. Through the result of the Cross Calibration Index (CCI), the generalization ability of the method is good. The three axis gradient system and the aeromagnetic compensation are proven valid in aeromagnetic prospecting by an experiment.
Geophysical prospecting; Three axis gradient system; Aeromagnetic compensation; Optically Pumped Magnetometer (OPM); Unmanned helicopter
TH762.3
A
1009-5896(2017)12-3030-09
10.11999/JEIT170233
2017-03-20;
2017-09-01;
2017-11-01
通信作者:张群英 qyzhang@mail.ie.ac.cn
国家重大科研装备研制项目(ZDYZ2012-1-03)
R&D of Key Instruments and Technologies of China (ZDYZ2012-1-03)