基于SingalR和Web的采摘机器人远程编队控制研究
2017-12-16唐惠康郑宝林
唐惠康,郑宝林
(河南职业技术学院,郑州 450046)
基于SingalR和Web的采摘机器人远程编队控制研究
唐惠康,郑宝林
(河南职业技术学院,郑州 450046)
多移动机器人协调是当前机器人技术的一个重要发展方向,但是在农业上的应用并不多。为了提高采摘机器人的智能化程度及作业效率,实现多机器人的协同实时控制,提出了一种基于Web的多机器人远程编队控制系统。针对当前Web实时应用程序技术的不足,构建了一种基于SingalR的Web实时应用程序框架,该框架可以实现逻辑和动态的执行任务,并将实时更新的数据定时地发送到所有连接的客户端。结合多智能体网络对采摘机器人的编队控制进行了研究,根据具体的多机器人系统,进行了实验测试,得到了多机器人编队控制的规划路径,计算了多机器人控制的残差精度,最后对多采摘机器人的工作效率进行了测试,验证了基于SingalR的Web实时应用程序框架在多采摘机器人编队控制中使用的可行性。
多机器人;协同控制;编队控制;Web框架;SingalR;采摘
0 引言
自20世纪80年代末以来,基于多智能体系统理论研究多机器人协作受到了普遍的关注,从军事领域到工业与民用领域,从星际探险到海底考察,从比赛到教学,均取得了不同程度的进步;但多机器人协同编队控制在农业中的应用却很少。
目前,国内关于群体机器人系统的研究正处于初始阶段,其技术还未成熟,对这方面的研究和报道也比较少,沈阳自动化所的机器人开放研究实验室是对多机器人协同控制研究比较早的单位。本研究将多机器人协同作业应用到了果实采摘作业过程中,并通过基于SingalR的Web实时应用程序框架对多机器人进行编队控制,以期提高采摘机器人的作业效率。
1 多机器人编队系统和控制网络
国内外对于多机器人编队控制的研究已经取得了一定的成果,但应用在农业方面的还比较少。美国Oak Ridge国家实验室Lynne E.Parker博士在多机器人协同控制方面做了大量研究,其工作主要是基于Agent智能控制技术,包括多Agent协同作业、自主Agent体系结构、多Agent通讯等。其团队研究的Coop-erative Robotics实验系统集成了多机器人感知和推理能力,可在未知环境中执行动态变化任务,如图1所示。

图1 Cooperative Robotics实验系统Fig.1 Experimental system of Cooperative Robotics
对于多机器人的协同控制是将机器人作为智能体,使它们具有协同作业的能力,按照系统中多智能体之间的相对关系,一般可以将多机器人控制系统分为以下3种结构。
1.1 完全型网络结构
多机器人编队控制的完全型网络采用的是对等和局部化通信,如图2所示。
该结构的智能体都有通信和控制模块,每个机器人都由链路进行连接。因此,对于复杂任务来说,完全型网络结构的作业效率比较低,是一种无组织的状。

图2 完全型网络结构Fig.2 The complete network structure
1.2 层次型网络结构
层次型网络将采摘机器人智能个体分为不同的层次,如图3所示。在同一个层次上的机器人不能够进行通信,而是需要请求上一层来完成;上一层机器人负责下一层机器人的决策和控制。层次型网络结构在工作过程中不需要保留所有的机器人信息,只需要保存下一层机器人的信息。该网络在通信方面不如完全型网络简略,但是结构层次调理,便于多机器人的管理。

图3 层次型网络结构Fig.3 The hierarchical network structure
1.3 联盟型网络结构
联盟型网络是按照机器人间距离的远近和功能,将机器人划分为不同的机器人联盟,如图4所示。在各个联盟内部都有一个协助的智能机器人个体,负责不同的联盟网络之间的通信,不同联盟之间的通信是对等的,其网络关系同完全网络型类似。

图4 联盟型网络结构Fig.4 The alliance network structure
多智能体协调系统的体系结构是整个系统执行协调合作任务的基础。本研究采用联盟型的结构网络,每个采摘机器人都装有中央处理器,获得初始数据后通过联盟网络结构,将值返回到Web实时应用程序框架。
2 实时应用程序框架
SingalR是一组能够实现Web实时应用程序的组件组合,它将服务器端和客户端之间的协议进行抽象化,支持HTML5 WebSocket协议和Comet的Ajax Long Pooling协议,可以根据用户端和服务器端的需求配置不同的环境,如配置不同的浏览器版本、操作系统类型和用户传输协议等,将其应用在采摘机器人的编队控制中,将会发挥巨大的作用。
图5为一个采摘机器人在作业过程中的躲避障碍物的流程。其避障的原理主要是通过超声波测距:当遇到障碍物时,可以测算出距离障碍物的距离,当距离较近时可以自行转弯,躲避障碍物。在多机器人编队控制中,当采摘机器人同时测得障碍物时,需要通过控制系统明确协同中不同职能机器人个体之间的控制关系,其控制系统的结构原理如图6所示。

图5 采摘机器人避障流程Fig.5 The process of obstacle avoidance for harvesting robot

图6 多采摘机器人编队避障流程Fig.6 The process of of obstacle avoidance for multi picking robot the formation
多采摘机器人的编队避障控制主要体现在协同控制和推理机制上,控制系统的顶层是中央处理器,其功能包括避障模块、多移动机器人的路径规划及任务规划;通过中央处理器进行协同控制,而底层是受协同控制的采摘机器人。中央处理器共有3个系统组成,包括模型库系统、数据库系统和知识库系统。知识库系统可以从数据库系统中得到事实的推理,可以决定模型库系统中使用哪些模型参数;获得初始数据后将值返回到Web实时应用程序框架,实现实时协同控制,如图7所示。
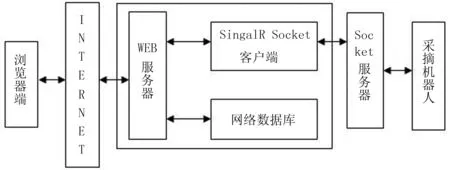
图7 基于Web控制的实时控制系统模型Fig.7 The model of real time control system based on Web control
基于Web和SingalR的实时应用程序框架主要包括远程浏览器端、SingalR组件、Web网站、Socket服务器端和3个采摘机器人。浏览器端可以通过Web服务器回传HTML页,执行嵌入式的Applet程序,并建立起Socket连接,从而实现了命令的直接输入和结果图像的显示和输出。Web服务器的功能主要是负责发布嵌入了Socket客户端程序的网页;而Socket服务器的功能主要是负责监听客户端的强求和接受命令,实现了打开浏览器就能对多个采摘机器人进行控制的功能。
3 多采摘机器人编队实时控制实验测试
为了验证SingalR和Web对多采摘机器人实时编队控制的可行性,采用多机器人测试的方法进行了机器人编队实时控制实验。首先测试了两个机器人编队的路径规划能力,其测试场景如图8所示。

图8 双机器人编示意图Fig.8 The diagram of dual robots
为了简化测试过程,将采摘机器人以两个移动式机器人R1和R2代替,通过测试其移动路径来完成规划能力的测试。
图9表示双采摘机器人编队的路径规划测试结果。图9中的障碍物可以任意摆放,测试过程主要测试双机器人的协同路径规划能力。由规划结果可以看出:两个机器人的路径协同性较好,可以无相互干扰的到达指定果实目标位置。

图9 双机器人编队路径规划测试Fig.9 The path planning test of dual robots formation
图10表示多机器人编队控制的误差测试结果。为了验证多机器人协同控制能力,本实验选取了5个实验机器人。测试结果表明:5个机器人在基于Web和SingalR实时协同控制编队的作用下,在30步之内便可以将误差降低为接近0,控制精度较高。
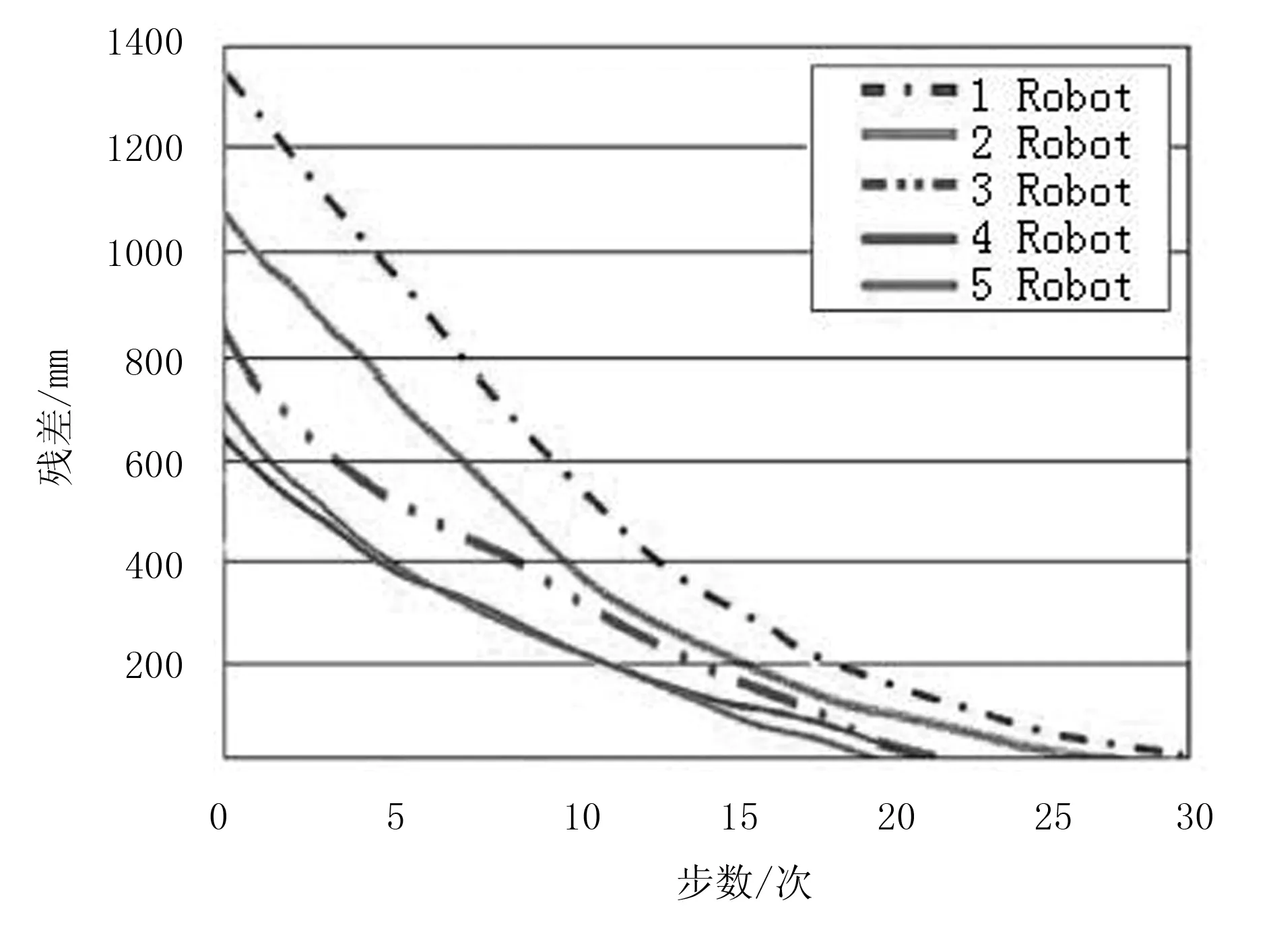
图10 机器人控制误差测试Fig.10 The error test of robot control
图11表示多采摘机器人编队控制的采摘效率统计结果。在测试过程中,按照采摘机器人到达指定采摘位置来表示采摘时间,采摘目标位置从0~30个变化,通过测试得到了机器人采摘时间随采摘目标个数的变化曲线。由曲线结果可以看出:随着采摘目标个数的增多,采摘时间由少到多依次为3个采摘机器人、双采摘机器人和单采摘机器人。其中,3个采摘机器人协同作业用时最少,由此表明:3个采摘机器人在协同编队的控制下,可以有效地提高机器人的作业效率。
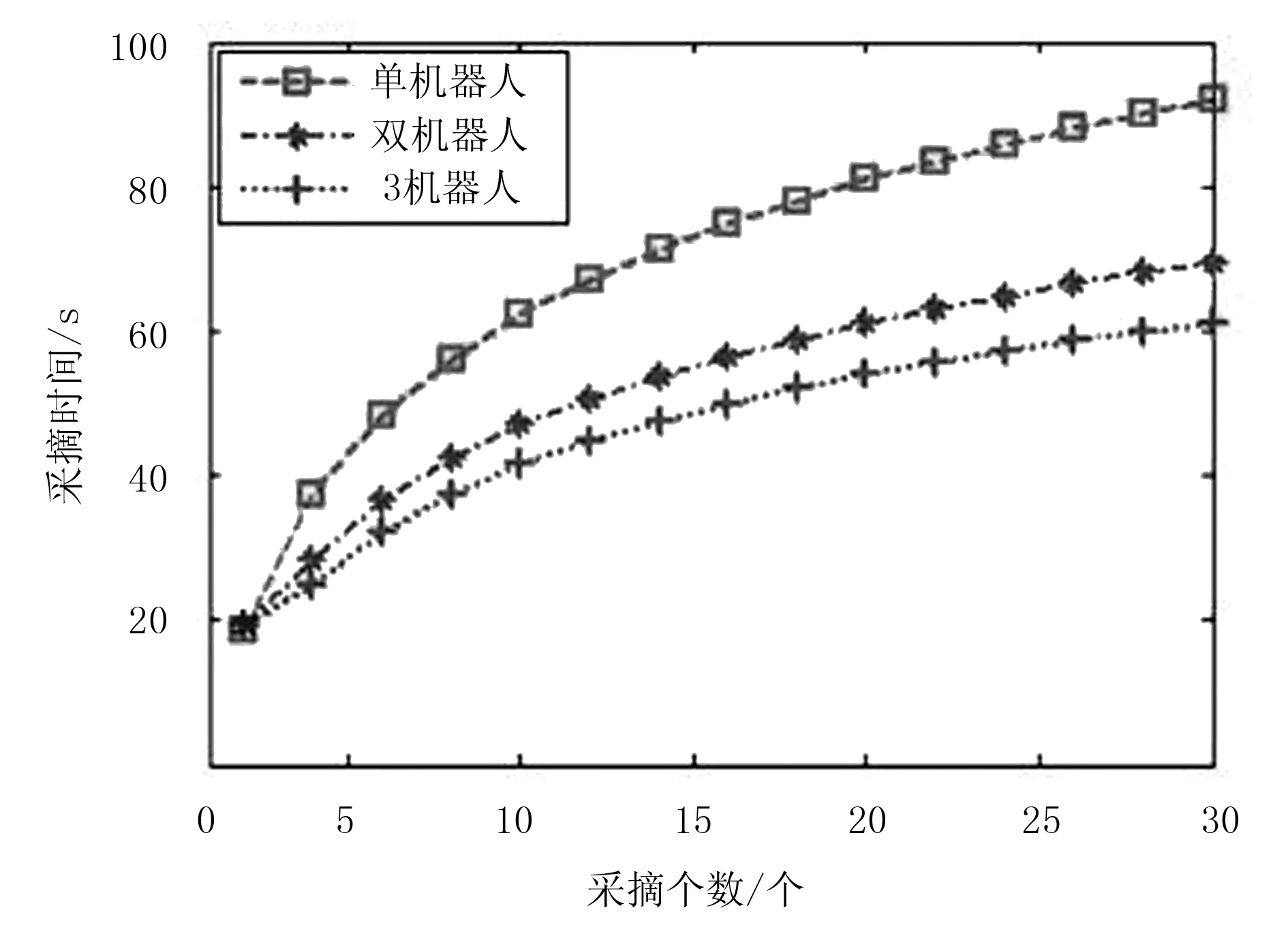
图11 机器人采摘效率测试结果Fig.11 The test results of robot picking efficiency
4 结论
基于SingalR和Web实时应用程序框架,将多机器人编队控制应用到了采摘机器人的优化设计中,并根据具体的多机器人系统进行了实验测试。将采摘机器人以两个移动式机器人R1和R2代替,测试结果表明:两个机器人的路径协同性较好,可以无相互干扰的到达指定果实目标位置。对多机器人编队控制的误差测试结果表明:在30步之内便可以将误差降低为接近0,控制精度较高。对多采摘机器人编队控制的采摘效率进行统计表明:3个采摘机器人协同作业用时最少,多机器人编队可以有效地提高采摘机器人的作业效率。
[1] 陈运鹏,龙慧,刘志杰.我国施肥技术与施肥机械的研究现状及对策[J].农机化研究,2015,37(4):255-260.
[2] 姬江涛,郑治华,杜蒙蒙.农业机器人的发展现状及趋势[J].农机化研究,2014,36(12):1-4.
[3] 乔永亮,何东键,赵川源,等.基于多光谱图像和SVM的玉米田间杂草识别[J].农机化研究,2013,35(8):30-34.
[4] 姬长英,周俊.农业机械导航技术发展分析[J].农业机械学报,2014,45(9):44-54.
[5] 孟庆宽,何洁,仇瑞承,等.基于机器视觉的自然环境下作物行识别与导航线提取[J].光学学报,2014, 34(7):1-7.
[6] 刘金龙,郑泽锋,丁为民,等.对靶喷雾红外探测器的设计与探测距离测试[J].江苏农业科学,2013,41 (7):368-370.
[7] 高国琴,李明.基于K-means算法的温室移动机器人导航路径识别[J].农业工程学报,2014, 30(7): 25-33.
[8] 方莉娜,杨必胜.车载激光扫描数据的结构化道路自动提取方法[J].测绘报,2013,42(2):260-267.
[9] 熊爱武.基于车载激光云点数据的道路模型重建[J].地理信息世界,2013,20(6):86-88.
[10] 魏泽鼎,贾俊国,王占永.基于视觉传感器的棉花果实定位方法[J].农机化研究,2012,34(6):66-68.
[11] 张铁中,林宝龙,高锐.水果采摘机器人视觉系统的目标提取[J].农业机械学报,2004,41(12):244-248.
[12] 廖勤武,王朝立,梅迎春.基于超声的非完整移动机器人避障控制[J].上海理工大学学报,2009,31(4): 402-405.
[13] 罗维平.基于DSP的移动机器人自动避障控制系统研究[J].伺服控制,2008, 31(8):31-33.
[14] 鲍官军,荀一,戚利勇,等.机器视觉在黄瓜采摘机器人中的应用研究[J].浙江工业大学学报,2010,38(1):114-118.
[15] 赵广涛,程荫杭.基于超声波传感器的测距系统设计[J].微计算机信息,2006(7):129-131.
[16] 宋健,张宾,于曙风.电磁感应传感器在喷雾机器人导航中的应用[J].农业工程学报,2005,27(6): 87-93.
[17] 陈中伟,肖华,吴功平.高压巡线机器人电磁传感器导航方法[J].武汉大学学报,2006,14(5):32-37.
[18] 项荣,应义斌,蒋焕煜.田间环境下果蔬采摘快速识别与定位方法研究进展[J].农业机械学报,2013, 44(11):208-223.
[19] 蔡健荣,孙海波,李永平,等.基于双目立体视觉的果树三维信息获取与重构[J].农业机械学报, 2012,43(3):153-156.
[20] 李立君,李昕,高自成,等.基于偏好免疫网络的油茶果采摘机器人图像识别算法[J].农业机械学报, 2012,43(12):209-213.
[21] 王文庆,张涛,龚娜.基于多传感器融合的自主移动机器人测距系统[J].计算机测量与控制,2013, 21(2):343-345.
[22] 韦伟,周凌翱,刘青.一种便携式的红外测距系统[J].电子设计工程,2011,19(21):40-42.
[23] 刘金帅,赖惠成,贾振红.基于YCbCr颜色空间和Fisher判别分析的棉花图像分割研究[J].作物学报,2011,37(7):1274-1279.
[24] 朱群峰,黄磊.温室移动机器人轨迹控制系统的设计[J].农机化研究,2009,31(4):73-75.
[25] 张卫东.我国温室发展的现状及发展建议[J].科技信息,2013(10):439.
[26] 李明,李旭,孙松林,等. 基于全方位视觉传感器的农业机械定位系统[J].农业工程学报,2010,26(2): 170-174.
Research on Remote Formation Control of Picking Robot Based on SingalR and Web
Tang Huikang , Zheng Baolin
(Henan Polytechnic, Zhengzhou 450046,China)
The coordination of multiple mobile robots is an important direction of the development of the robot technology, but not many applications in agriculture, in order to improve the picking robots, improve work efficiency, multi robot collaborative real-time control, and puts forward a kind of control system based on web remote robot formation. In view of the current real-time web application technology, build the a SingalR the real-time web application framework based on, the framework can achieve dynamic logic, and execution of the task and real-time update of data regularly sent to all the connected clients. Combining the multi-agent networks, the picking robot formation control is studied, according to the specific of the multi robot system, experimental test, the formation control of multi robot path planning, to calculate the residual accuracy of multi robot control, and finally tested on more than picking the work efficiency of the machine, verification based on SingalR real-time web application framework in more than picking the feasibility of using robots in formation control.
multi robot; cooperative control; formation control; web framework; singalR; picking
2016-01-26
国家林业局“948计划”项目(2014-4-28);国家自然科学基金项目(21376241);吉林省科技厅项目(20130206054N Y)
唐惠康(1980-), 男,吉林磐石人,讲师,硕士,(E-mail)thk_hp@sina.com。
S24; TP368.5
A
1003-188X(2017)03-0237-05
