人的木薯块根拔起过程自适应调节机理的试验研究
2017-12-16王锦涛
刘 浩, 杨 望,2, 杨 坚,2, 李 杨, 王锦涛
(1.广西大学 机械工程学院,南宁 530004;2.广西制造系统与先进制造技术重点实验室,南宁 530004)
人的木薯块根拔起过程自适应调节机理的试验研究
刘 浩1, 杨 望1,2, 杨 坚1,2, 李 杨1, 王锦涛1
(1.广西大学 机械工程学院,南宁 530004;2.广西制造系统与先进制造技术重点实验室,南宁 530004)
为了探明经验丰富薯农块根拔起过程的自适应调节机理,采用田间物理试验(高速摄像、块根拔起过程测定)和问询调查相结合的方法,对有经验薯农的木薯块根拔起过程进行了试验研究,从而为木薯收获机械拔起控制系统设计提供依据。结果表明:对于不同土质和块根生长的情况,薯农木薯块根拔起自适应调节过程不同。薯农依据自身经验,先通过试探感知拔起难度,后确定和修正块根拔起方式,进行块根拔起过程控制。对于土质硬度小和块根长度短、生长深度浅的情况,试探阶段结束后,将块根拔起速度控制在一个适当的水平,把块根直接拔出。对于土质硬度较大或块根长度较长、生长较深的情况,试探阶段结束后,先进行抖动拔起,后对拔起速度进行修正,停止抖动操作,把拔起速度维持在一个适当水平拔出块根。对于土质硬度大或块根长度长、生长深的情况,试探阶段结束后,先进行抖动松土,使土壤破裂和破坏土壤与块根的粘附力,以减小土壤阻力和拔起难度,后修正拔起方式,加大抖动速度,把块根拔出。本文为木薯收获机械拔起速度控制系统设计提供了依据。
木薯块根;拔起过程;高速摄像;自适应调节;机理
0 引言
采用挖掘松土-拔起分离和直接拔起(土壤较松时)的方式进行木薯块根机械收获,其功耗小、损失少[1-2]。相关的研究表明:土壤性质和每棵木薯的块根生长情况相同时,采用较优的块根拔起速度模型进行块根拔起收获能达到减少收获损失和提高收获效率的目的,但实际上在种植木薯的田块中,不同位置的土壤软硬程度不一,块根的生长情况也有差别[3-5],使得在同一田块中采用某一较优的块根拔起速度模型进行块根拔起收获时,难以同时达到减少收获损失和提高收获效率的目的[6-7]。因此,如何使块根拔起机构具备良好的自适应调节功能成为了能同时减少收获损失和提高效率的关键。试验表明:人长期形成的收获经验对减少收获损失和提高收获效率有重要的作用,有经验的薯农具有良好的自适应调节功能[8],木薯块根收获机械拔起机构的自适应调节功能的形成可以模拟人的调节过程进行,但目前人拔起块根的自适应调节功能形成机理未见有报道。因此,本文采用田间物理试验(高速摄像、块根拔起过程测定)和问询调查相结合的方法,对有经验薯农的木薯块根拔起过程进行研究,探明其拔起块根的自适应调节功能形成机理,为新型木薯收获机拔起控制系统的设计提供依据。
1 试验方法及设备
1.1 试验方法
为了获得较好的人的块根拔起自适应调节规律,探明其块根拔起的自适应调节功能形成机理,减少试验时间,本文随机选取5名有丰富木薯块根收获经验的薯农,且每个薯农随机选取10棵木薯进行拔起试验。拔起试验时,通过高速摄像、拔起力测量和薯农的块根拔起控制过程问询,获取块根拔起过程中薯农身体各关节点的变化(位移、速度)和块根拔起力的变化及薯农的自我控制概况。
本试验使用的高速摄像仪器为黑白高速相机,对白色背景黑色标记点较敏感。因此,为保证标记点的清晰,试验对象身穿白色紧身衣,在躯干及拔起力测定装置上贴若干追踪点,如图1所示。同时,为更好地研究木薯拔起过程中薯农动作的变化过程,部分拍摄样本采用侧面拍摄。正面拍摄的追踪点位置分别在左肩、右肩、胸、左肘、右肘、左腕、右腕、左膝、右膝和拔起装置上,而侧面拍摄的追踪点位置分别在肩、肘、腕、髋、膝和拔起装置上,如图1所示。

(a) 正面 (b) 侧面图1 正面及侧面追踪点示意图Fig.1 Front and side tracking point diagram
1.2 试验设备及场地
使用的主要仪器设备:HotShote1024型高速摄像机(日本NAC公司,选用拍摄帧速率为250帧/s,图像分辨率为500×760)、笔记本电脑、UPS电源和DH5937动态测试仪(江苏东华测试技术有限公司,选用采样频率为50 Hz)及自制拔起力测定装置。摄像机位于被测对象的正前方,主光轴垂直于拔起运动所在的平面,镜头离地高度为0.96m,拍摄距离约为6m,所拍摄的画面实际高度为1.65m,实际宽度为1.05m,摄像机设置为前触发方式[9]。拔起力测定装置外贴4片应变片组成全桥电路,采用称质量法进行标定[3]。试验原理图如图2所示。试验场地为南宁市武鸣区太平镇,武鸣农机推广站试验田,木薯品种为华南205。

图2 试验原理图Fig.2 Test principle diagram
2 试验结果及分析
表1是薯农木薯块根拔起试验的结果。由表1可知:由于收获经验的不同,不同薯农收获效率和收获损失不同;同时,由于块根的生长情况和土质情况不同,拔起块根时的难易程度不同,同一薯农拔起不同木薯块根时的效率和损失也不相同。因此,为了获得收获损失少,且不失代表性的人拔起块根的自适应调节过程,探明其自适应调节功能形成机理,本文选取没有收获损失的5号薯农的试验作为研究对象,且选取拔起时间短和拔起力小(土质硬度小和块根长度短、生长深度浅)、拔起时间较长和拔起力较大(土质硬度较大或块根长度较长、生长较深)及拔起时间长和拔起力大(土质硬度大或块根长度长、生长深)的3种试验情况进行分析。

表1 5位薯农木薯块根拔起试验结果Table 1 Cassava pull out test results of 5 cassava farmers

续表1
图3是5号薯农在拔起时间短和拔起力小情况时(试验号48)的块根拔起过程物理参数的变化曲线图。其中,图3(a)是块根拔起力的变化规律图,图3(b)是块根拔起速度的变化规律图,图3(c)是块根拔起位移的变化规律图。而相应的高速摄像图如图4所示。
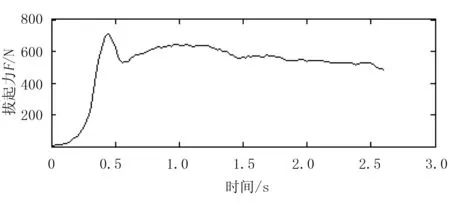
(a) 拔起力与时间变化关系曲线

(b) 拔起速度与时间变化关系曲线

(c) 拔起位移与时间变化关系曲线图3 48号块根拔起过程物理参数变化曲线图Fig.3 48 root out curve of physical parameters change process

(a) t=0s (b) t=0.41s (c) t=0.56s (d) t=1.3s (e) t=2.58s图4 48号块根拔起过程高速摄像图Fig.4 The 48 root pulling process of high speed camera lens
由图3可知:随时间增加,块根拔起速度和拔起力先快速增大,时间为0.41s时快速减小,时间为0.56s后趋于较平稳变化;而这时的最大拔起力约为630N,较小,但最大拔起速度较大,达到224mm/s。由图4和对薯农的问询可知:在时间为0.56s之前,薯农手臂未发生弯曲,主要通过腰部用力,带动上肢及拔起装置整体向上运动,拔起块根;而在时间为0.56s之后,薯农双臂开始发生弯曲,这时在腰力和双臂提力的作用下把块根拔起。薯农自身主要通过拔起速度的控制,控制整个块根拔起过程。这表明对于木薯块根拔起时间短和拔起力小的情况,薯农的木薯块根拔起自适应调节过程可分为试探(0.1~0.56s)和拔起、出土(0.56~2.58s)2个阶段:在试探阶段,当薯农感觉到短时间内块根拔起位移过大,块根拔起速度过快,根据经验判断块根可能被拔断时,通过减小腰部用力,使拔起速度快速下降;在拔起、出土阶段,薯农先根据经验对己降低的块根拔起速度进行修正,把速度提升到一个适当的水平,后保持较平稳的速度把块根拔出,目的是在保证块根不被拔断的条件下,保持有一定水平的收获效率。
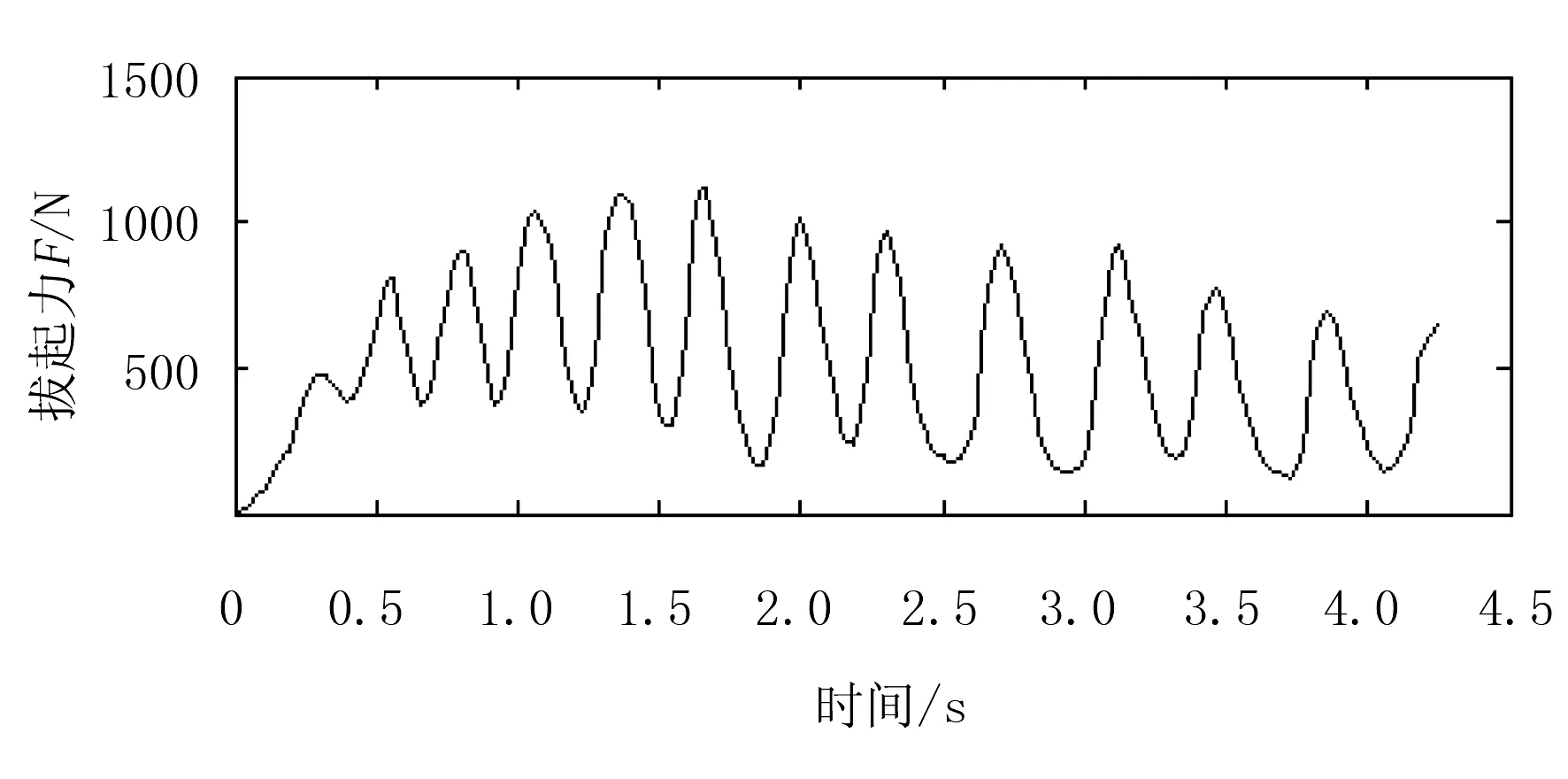
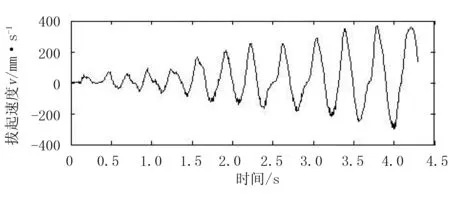
图5是5号薯农在拔起时间较长和拔起力较大情况时(试验号42)的块根拔起过程物理参数的变化曲线图。其中,图5(a)是块根拔起力的变化规律图,图5(b)是块根拔起速度的变化规律图,图5(c)是块根拔起位移的变化规律图;而相应的高速摄像图,如图6所示。

(a) 拔起力与时间变化关系曲线

(b) 拔起速度与时间变化关系曲线

(c) 拔起位移与时间变化关系曲线图5 42号块根拔起过程物理参数变化曲线图Fig.5 42 root out curve of physical parameters change process

(a) t=0s (b) t=1.1s (c) t=1.26s (d) t=1.68s (e) t=1.8s (f) t=3.02s (g) t=3.9s图6 42号块根拔起过程高速摄像图Fig.6 The 42 root pulling process of high speed camera lens
由图5可知:时间在1.1s前,随时间增加,块根拔起力快速增大,相应的拔起速度变化不大,并且拔起速度和拔起位移小;时间在1.1s之后,随时间增加,块根拔起力和拔起速度的大小呈周期性变化,且块根拔起力和拔起速度幅值变化大,块根拔起力在467~1 079N间变化,拔起速度在-165~240.3mm/s间变化,位移缓慢增大;时间在3.02s之后,随时间增加,块根拔起力逐渐减小,拔起速度趋于平稳,位移较快增大。由图6和对薯农的问询可知:在时间为1.26s之前,薯农手臂未发生弯曲,主要通过腰部用力,带动上肢及拔起装置整体向上运动,拔起块根;在时间1.26~3.02s之间,薯农双臂开始逐渐弯曲,薯农以腰力为主,双臂提力为辅,带动拔起装置继续向上运动;时间在3.02s之后,薯农双臂弯曲角度增大,这时在腰力和双臂提力的作用下把块根拔出。薯农自身主要通过控制拔起速度的大小来控制拔起力,达到减少块根拔断损失的目的。这表明对于拔起时间较长和拔起力较大情况,薯农的木薯块根拔起自适应调节过程可分为试探(0~1.26s)、抖动拔起(1.26~3.02s)和出土(3.02~3.99s)3个阶段。在试探阶段,当薯农感觉块根拔起力较大,且块根位移变化不大时,根据经验判断,此木薯块根拔起阻力较大,如继续直接增大拔起力,可能导致木薯块根被拔断;因此,通过减小腰部用力,降低拔起速度,减小块根拔起力,避免块根被拔断。在抖动拔起阶段,薯农对木薯块根进行适当的抖动拔起,以达到减小土壤阻力和维持一定的拔起效率的目的。在出土阶段,当时间为3.02s时,薯农感觉块根拔起力相对已较小,位移已较大,判断块根将拔离土体,薯农对拔起速度进行修正,停止抖动操作,把拔起速度维持在一个适当水平,保证块根在不被拔断的条件下,提高拔起效率。
图7是5号薯农拔起时间长和拔起力大情况时(试验号44)的块根拔起过程物理参数的变化曲线图。其中,图7(a)是块根拔起力的变化规律图,图7(b)是块根拔起速度的变化规律图,图7(c)是块根拔起位移的变化规律图。相应的高速摄像图如图8所示。
(a) 拔起力与时间变化关系曲线
(b) 拔起速度与时间变化关系曲线

(c) 拔起位移与时间变化关系曲线图7 44号块根拔起过程物理参数变化曲线图Fig.7 44 root out curve of physical parameters change process

(a) t=0s (b) t=0.32s (c) t=0.4s (d) t=1.66s (e) t=3.85s (f) t=4.1s (g) t=4.3s图8 44号块根拔起过程高速摄像图Fig.8 The 42 root pulling process of high speed camera lens
由图7可知:时间在0.32s之前,随时间增加,块根拔起力快速增大,但相应的拔起速度变化小,并且拔起位移小;时间到0.32s时,拔起力达到 473N,而拔起速度只为32mm/s;时间在0.32~1.66s间,随时间增加,块根拔起力和块根拔起速度、位移幅值呈周期性增大变化,但块根拔起力幅值变化大,而拔起速度和位移幅值变化小;时间为1.66s时,块根拔起力达到最大值1 120N,而相应的拔起速度值只有167mm/s,位移量为30mm;时间在1.66~4.3s间,随时间增加,块根拔起力和块根拔起速度、位移呈周期性变化,且变化周期有所增大,但块根拔起力幅值呈减小变化,块根拔起速度和位移幅值呈增大变化。时间为3.85s时,拔起速度达到最大值370mm/s,此时的拔起力为695N。由图8和对薯农的问询可知:在时间为0.4s之前,薯农手臂未发生弯曲,双腿弯曲,腰部下沉并挺直,薯农主要通过腰部用力,带动上肢及拔起装置整体向上运动,拔起块根;时间在0.4~3.85s间,薯农双臂开始逐渐向后弯曲,薯农以腰力为主,双臂提力为辅,共同作用带动拔起装置向上运动;在3.85s之后,薯农双臂弯曲角度增大,薯农以腰力和双臂提力共同作用带动拔起装置向上运动,拔出块根。薯农自身主要通过控制拔起速度达到控制块根拔起力和整个块根拔起过程,以减少块根拔断损失,提高收获效率。这表明对于拔起时间长和拔起力大情况,薯农的木薯块根拔起自适应调节过程可分为试探(0~0.32s)、抖动松土(0.32~1.66s)和抖动拔出(1.66~4.3s)3个阶段。在试探阶段,薯农感觉拔起力较大,但块根位移几乎不变,根据经验判断,土壤硬度大或块根长、生长深,块根拔起阻力大,如果继续用力可能导致木薯块根拔断或需要的力大,无法拔起,因此减小用力。在抖动松土阶段,薯农根据经验进行抖动松土,使土壤破裂和破坏土壤与块根的粘附力,以减小土壤阻力和拔起难度。在出土阶段,由于进行抖动松土后,薯农感觉土壤已有了一定松度且土壤与块根的粘附力已较小,根据经验修正拔起方式,加大抖动速度,把块根拔出,达到在保证块根不被拔断的前提下,提高拔起效率。
4 结论
通过采用田间物理试验的高速摄像、块根拔起过程测定和问询调查相结合的方法,对有经验薯农木薯块根拔起过程进行。研究表明:对于不同土质和块根生长的情况,薯农的木薯块根拔起自适应调节过程不同,但薯农一般依据自身的块根收获经验,先通过试探感知拔起难度,后确定和修正块根拔起方式,进行块根拔起过程控制。对于土质硬度小和块根长度短、生长深度浅的情况,试探阶段结束后,把块根拔起速度控制在一个适当的水平,把块根直接拔出。对于土质硬度较大或块根长度较长、生长较深的情况,试探阶段结束后,先进行抖动拔起,后对拔起速度进行修正,停止抖动操作,把拔起速度维持在一个适当水平拔出块根。对于土质硬度大或块根长度长、生长深的情况,试探阶段结束后,先进行抖动松土,使土壤破裂和破坏土壤与块根的粘附力,以减小土壤阻力和拔起难度,后修正拔起方式,加大抖动速度,把块根拔出。
[1] Agbetoye L A S. Developments in Cassava Harvesting Mechanization[J].West Indian Journal of Engineering, 1999, 22(1):11-19.
[2] 杨望,杨坚,郑晓婷,等.木薯块根收获机械与技术研究现状及发展趋势[J].农机化研究,2012,34(12):231-235.
[3] Yang Wang, Li Juanjuan, Yang Jian, et al.Numerical simulation of an experienced farmer lifting tubers of cassava for designing a bionic harvester[J].CMES:Computer Modeling in Engineering and Sciences, 2015, 104(6):471-491.
[4] 杨望,张硕,杨坚,等.收获期木薯地耕作层土壤硬度的试验研究[J].农机化研究,2015,37(7):176-180.
[5] 陈丹萍,廖宇兰,王涛,等.影响木薯机械化收获的生物环境特性[J].农机化研究,2012,34(6):55-58.
[6] 梁欣锐.广西木薯机械化生产关键技术研究[J].广西农业机械化,2015(1):29-31.
[7] 杨怡,廖宇兰,郑侃,等.木薯田间机械化作业研究现状分析[J].广东农业科学,2015(8):137-140.
[8] 杨望.基于粘土的木薯块根仿生拔起机构基础理论研究[D].南宁:广西大学,2012.
[9] 林辉杰,严波涛,梁海.国内外优秀板球运动员快速投球中投掷步技术比较研究[J].西安体育学院学报,2013(1):115-119.
Experimental Study of Adaptive Regulation Mechanism of People Uprooting Cassava
Liu Hao1, Yang Wang1,2,Yang Jian1,2,Li Yang1,Wang Jintao1
(1.College of Mechanical Engineering, Guangxi University, Nanning 530004, China; 2.Guangxi Key Laboratory of Manufacturing System & Advanced Manufacturing Technology, College of Mechanical Engineering, Guangxi University, Nanning 530004, China)
As to investigate adaptive regulation mechanism during the process when experienced farmers uprooting cassava, this paper, making use of high speed camera in field physical experiment, measurement of uprooting process and oral questions, conducts an exploratory study of cassava tuber pulling process by experienced farmers. The results show that for different soil and cassava tubers, adaptive adjusting process varies when farmers pull cassava tuber. Based on their own experience, farmers first probe the difficulty of pulling up, then determine and adjust the root pulling methods, and finally make control of root pulling process. For low soil hardness, short root length and shallow depth of the growth, farmers make uprooting speed in a appropriate level after the trial stage and then pull the root directly. For greater soil hardness or longer root length and shallow depth of the growth, farmers first pull up the root jitterly manually after the trial stage, make correction of pulling velocity and stop dithering. Finally farmers pull out cassava tubers by maintaining the pulling speed at an appropriate level. For greater soil hardness or longer root length and deep growth, after the trial stage, farmers first jitter to loosen the soil which leads to the soil rupture and destruction of adhesion force between soil and cassava tubers. As a consequence, soil resistance and difficulty of pulling up are reduced. And then uprooting way is adjusted, the jitter rate is increased while the jittering frequency is decreased. Finally, cassava tubers is pulled out by farmers.
cassava tubers; pulling process; high speed camera; adaptive adjustment; mechanism
2016-03-03
国家自然科学基金项目(51365005、51065003);广西制造系统与制造技术重点实验室课题(13-051-09S01)
刘 浩(1989-),男,山东泰安人,硕士研究生,(E-mail)215977057@qq.com。
杨 望(1984-),男,广西合浦人,副教授,博士,硕士生导师,(E-mail)yanghope@163.com。
S225.7+1
A
1003-188X(2017)03-0186-06
