酿酒葡萄修剪装置的设计
2017-12-16王丽红江英兰李成松
王 哲,王丽红,付 威,江英兰,坎 杂,李成松
(石河子大学 机械电气工程学院,新疆 石河子 832003)
酿酒葡萄修剪装置的设计
王 哲,王丽红,付 威,江英兰,坎 杂,李成松
(石河子大学 机械电气工程学院,新疆 石河子 832003)
酿酒葡萄修剪作业直接影响酿酒葡萄的产量和品质。为此,针对新疆酿酒葡萄人工修剪劳动强度大、效率低、费用高等问题,结合新疆酿酒葡萄的种植模式和修剪要求,设计了一种酿酒葡萄修剪装置。介绍了修剪装置的整机结构和工作原理,并对旋转刀刀盘进行了运动分析,理论分析表明:当拖拉机前进速度为6km/h、旋转刀刀盘半径为200mm、刀片长度为20mm、刀片数量为4及旋转刀刀盘转速为2 000r/min时,该修剪装置可以满足酿酒葡萄的修剪要求。同时,通过AMESim液压仿真软件对修剪装置液压系统进行仿真分析,验证了修剪装置液压系统的可行性。
酿酒葡萄;修剪装置;旋转刀盘;液压系统;仿真分析
0 引言
葡萄为葡萄科,是世界上栽培最早、种植面积分布最广的果树之一[1]。2014年中国酿酒葡萄的种植面积达到7.99万hm2,占世界总种植面积的10.6%,种植面积世界第二,仅次于西班牙[2]。新疆依托资源优势和农业产业结构的调整,葡萄产业得到了快速健康的发展,2015年新疆酿酒葡萄种植面积已超过3.3万hm2[3]。酿酒葡萄对果实含糖量、含酸量、色泽具有特殊要求,葡萄正常生长需要良好的光照和通风条件[4]。在自然情况下葡萄植株的枝蔓密布,受极性现象制约,养分大部分消耗于营养生长,为提高酿酒葡萄产量和品质,改善葡萄园通风透光条件,使营养集中于结果梢上,对酿酒葡萄进行科学的修剪尤为重要[4-7]。
国外葡萄产区主要集中于美国、法国、意大利和西班牙等,葡萄的栽培技术比较先进,生产管理规范,已实现了葡萄修剪的机械化[8]。我国葡萄的种植区域分布广泛,地形地貌多样,种植模式也多种多样,限制了葡萄生产机械化的发展[8]。目前,国内修剪机械的发展比较缓慢,研发、生产企业数量少,种类单一,与国外发展水平还有很大差距,修剪作业主要以单支修剪机为主[9]。为此,本装置参考国外多种修剪机先进机型,并考虑修剪机的修剪质量和作业效率等因素,设计了一种适用于酿酒葡萄机械化修剪的装置。该装置可以有效地调节酿酒葡萄修剪的高度和宽度,从而大幅减轻人工修剪的劳动强度,减少人工花费,显著地提高酿酒葡萄修剪的效率。
1 总体方案及技术参数
1.1 种植模式及农艺要求
酿酒葡萄种植模式主要分为篱架式、柱架式和棚架式,新疆酿酒葡萄种植模式主要为单臂篱架种植模式,如图1所示。立柱多为实心水泥树桩,少数采用空心铝制方管,埋入地下部分不少于500mm,国外发达国家酿酒葡萄立柱多采用木质立柱树桩。新疆酿酒葡萄栽培一般为2 000mm×3 000mm(行高×行距),株距500mm,桩距6 000mm,普通酿酒葡萄叶幕宽度大于1 000mm,高度2 000mm左右。新疆酿酒葡萄种植模式与国外相比具有修剪宽度较宽,酿酒葡萄藤下部枝条较多且葡萄藤根部与水泥立柱间存在间距等特点。
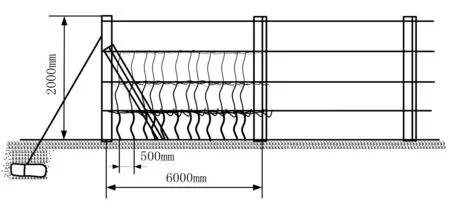
图1 酿酒葡萄种植模式Fig.1 Ridge planting pattern of wine grape
1.2 整机结构及工作原理
本装置针对新疆酿酒葡萄的种植模式和农艺要求,考虑酿酒葡萄修剪机的修剪质量和作业效率等因素,选择为拖拉机前悬挂挂接方式。酿酒葡萄修剪装置主要由机架、旋转刀总成、液压马达和液压油缸等部分组成,如图2所示。
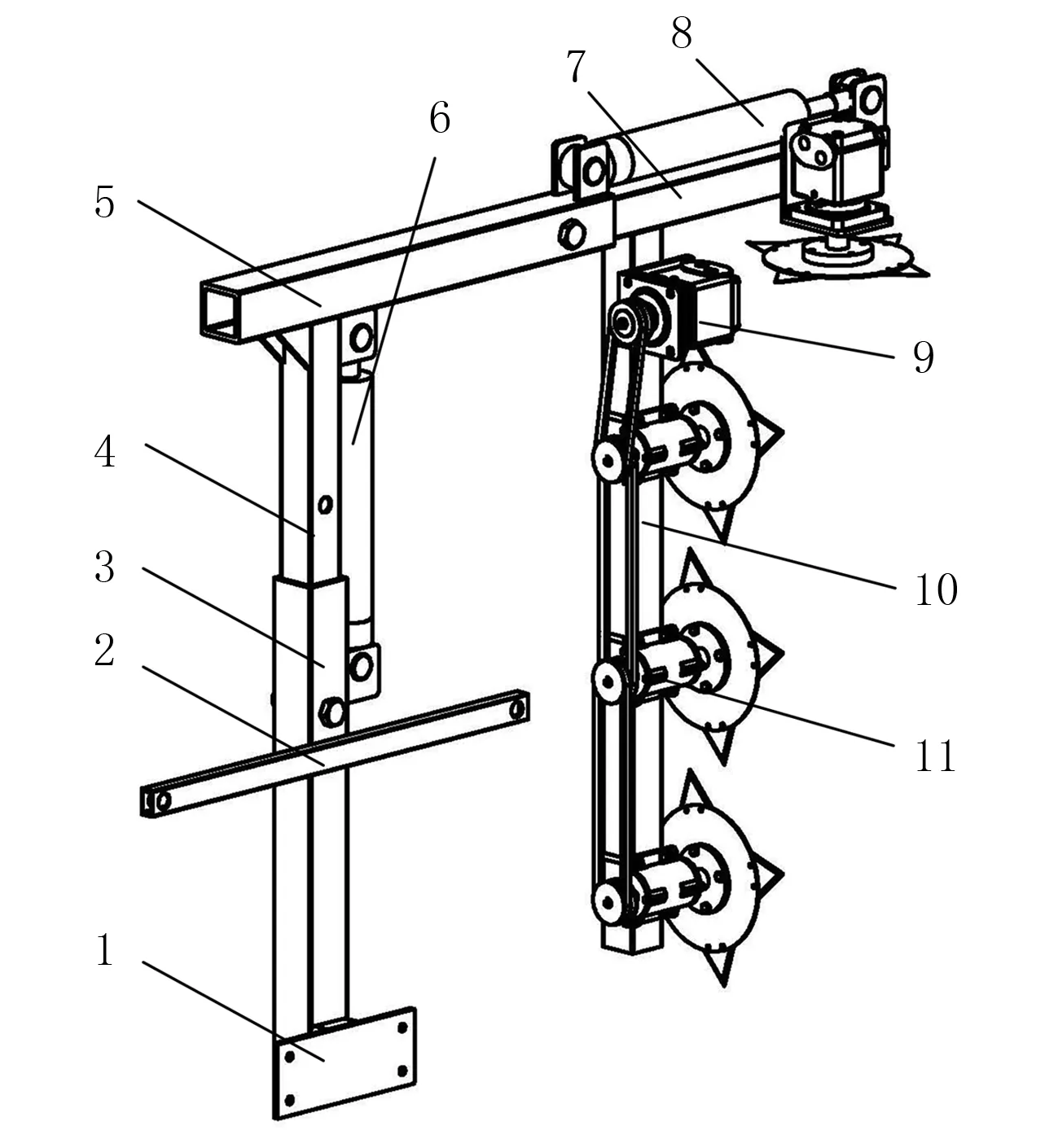
1.连接件 2.水平横梁 3.竖直伸缩套 4.竖直伸缩梁 5.水平伸缩套 6.竖直液压油缸 7.水平伸缩梁 8.水平液压油缸 9.液压马达 10.竖直梁 11.旋转刀总成图2 修剪装置结构图Fig.2 The structure of trimming device
竖直伸缩套与竖直伸缩梁、水平伸缩套与水平伸缩量之间分别以套合的形式进行连接并且安装有液压油缸6和8,可以实现修剪装置竖直与水平方向上的位置调节。竖直方向上液压马达支架和3组旋转刀总成通过螺栓安装于竖直梁上;水平方向上液压马达支架通过螺栓安装在水平伸缩梁上且水平方向上液压马达主轴与旋转刀刀盘相配合。
该修剪装置通过连接件安装于拖拉机前端,水平横梁通过钢丝绳与拖拉机前桥相连接,以保证修剪装置的稳定性。液压油缸、液压马达动力由拖拉机液压系统提供。作业时,根据酿酒葡萄修剪的农艺要求,通过拖拉机液压系统驱动竖直伸缩梁的升降和水平伸缩梁的伸缩分别实现修剪高度和宽度的调节。同时,拖拉机液压系统将动力传至两个液压马达实现马达的高速转动。其中,竖直方向上的液压马达通过V型带将动力分配至3组旋转刀的皮带轮上带动旋转刀高速旋转;水平方向上液压马达主轴安装有旋转刀盘,通过液压马达主轴驱动旋转刀盘高速转动,在刀盘的高速转动下将酿酒葡萄枝条切除。
1.3 主要技术指标
根据新疆酿酒葡萄的种植模式和农艺要求,酿酒葡萄修剪装置主要技术指标,如表 1 所示。酿酒葡萄修剪机为单侧修剪可以通过两次修剪实现酿酒葡萄的修剪工作。
表1 修剪装置主要技术指标Table 1 Trimming device main technical parameters
2 关键工作部件结构及刀盘运动分析
旋转刀总成为酿酒葡萄修剪装置的关键工作部件,主要作用是将酿酒葡萄枝切除保证酿酒葡萄的修剪质量。旋转刀切割器的切割速度和刀片结构是影响酿酒葡萄修剪质量的重要因素。
2.1 旋转刀总成结构
根据酿酒葡萄的种植模式和机器的结构特点,本修剪装置采用旋转刀切割器进行修剪作业。旋转刀总成主要由轴承座、刀盘、刀片、主轴、法兰盘及端盖等组成,如图3所示。
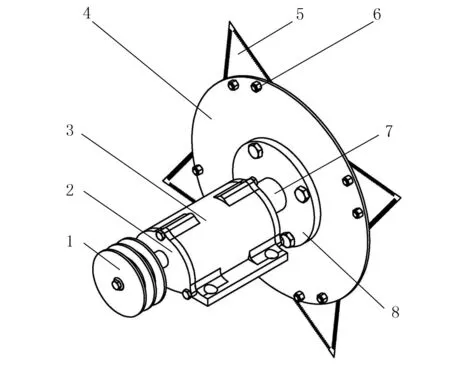
1.皮带轮 2.端盖 3.轴承座 4.刀盘 5.刀片 6.螺栓 7.主轴 8.法兰盘图3 旋转刀总成Fig.3 The assembly of rotating cutter
旋转刀刀盘半径为200mm,单个刀片长度为20mm,竖直方向上3组旋转刀并排,旋转刀修剪总幅宽为1 320mm,大于酿酒葡萄修剪总幅宽1 200mm[10-11],满足酿酒葡萄修剪幅宽要求。刀盘与法兰盘之间采用螺栓连接,主轴与法兰盘之间过盈配合并采用螺栓安装定位。皮带轮、刀盘与主轴同步转动,刀片将葡萄枝切除。传动系统采用V型皮带传动,轴承座通过螺栓安装在机架上,以便于旋转刀总成位置的调整和皮带的紧固。
刀片的结构直接影响修剪质量和作业效率,旋转刀刀片结构如图4所示。刀片经热处理加工制成,为保证刀片紧固,采用螺栓安装定位。刀片刃口呈齿纹状,从而增加了刀刃对葡萄枝的切割能力,减少了葡萄枝从刀片刃口中滑出的概率。同时,齿纹刃口有自磨刃现象,避免了光刃刀片因磨修所造成的工时损失或因磨修过热退火造成刀片的变形而不能保持其原始硬度等问题。
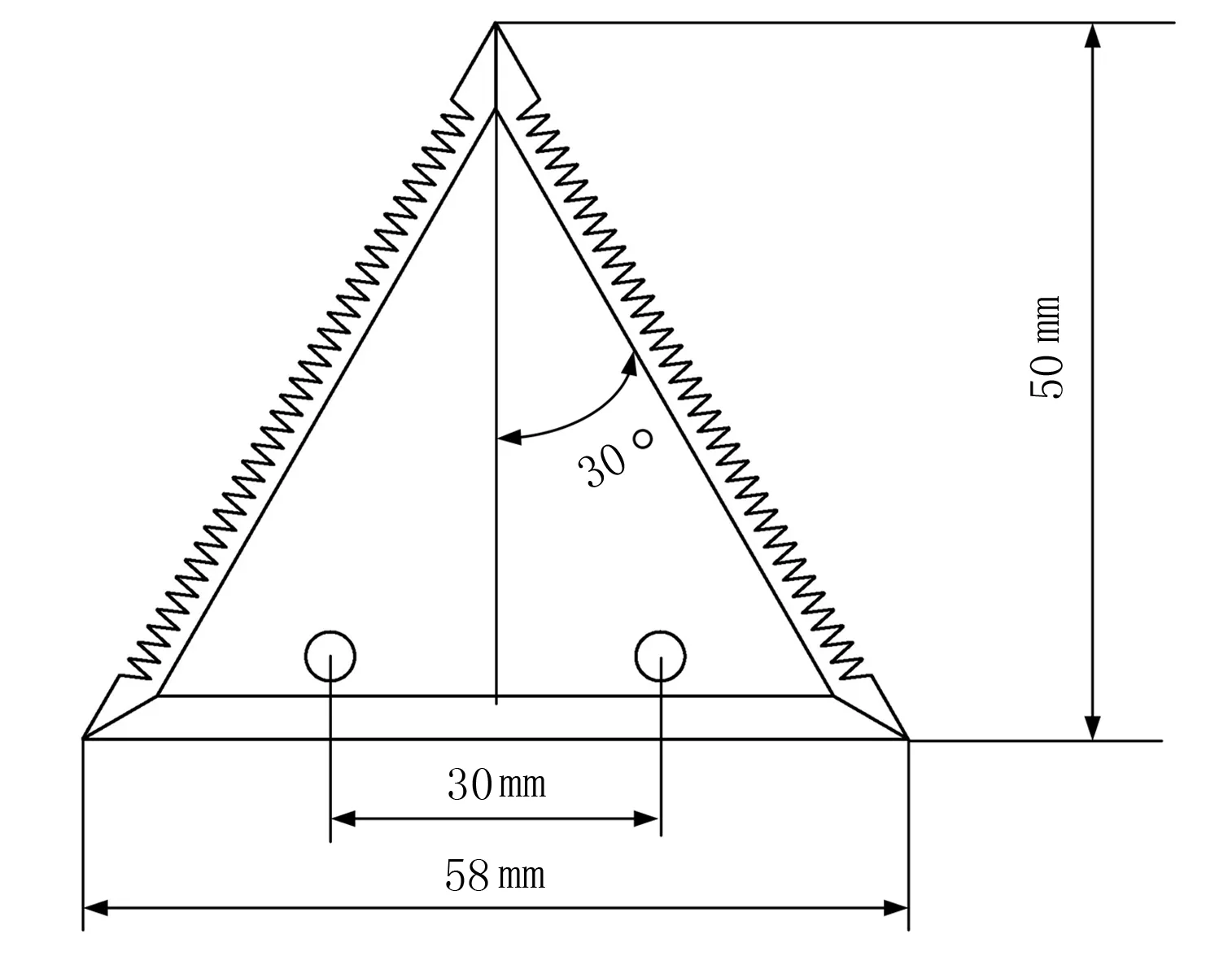
图4 刀片结构图Fig.4 The structural of blade
2.2 刀盘运动分析
刀片切割运动由刀盘的旋转运动与拖拉机前进运动合成,刀片相对于地面做余摆线运动。刀片顶点运动轨迹如图5所示。为便于分析刀盘的运动过程,将刀盘的运动简化成运动分析简图,设刀盘中心为坐标原点O,水平向右为x轴,垂直方向(拖拉机前进方向)为y轴,A、C点为刀片的根部,B、D点为刀片的顶点,刀片逆时针旋转的角速度为ω,则相邻刀片内外端点A、B、C、D的位移方程如下:
第1个刀片内侧A点的位移方程为
(1)
式中r—刀盘半径(m);
α—刀片中心线与轴方向的夹角;
ω—刀盘旋转角速度(r/min);
t—刀盘转动时间(s);
v0—拖拉机前进速度(m/s)。
第1个刀片外侧B点的位移方程为
(2)
式中h—刀片高度。
第2个刀片内侧C点的位移方程为
(3)
第2个刀片外侧D点的位移方程为
(4)
式中β—相邻刀片之间的夹角。
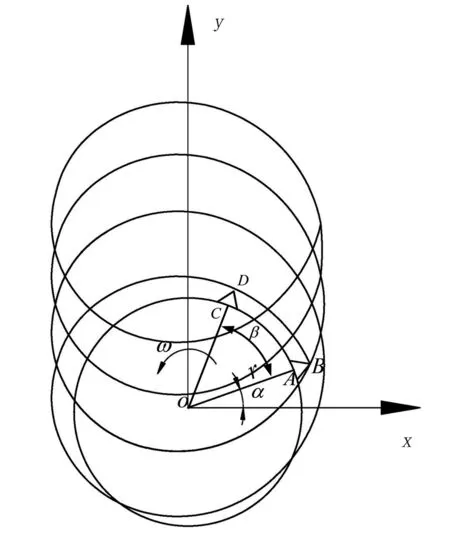
图5 刀刃运动轨迹Fig.5 The blade trajectory
2.3 刀盘转速确定
刀片运动速度越大则酿酒葡萄枝的动能就越大,越有利于酿酒葡萄枝的切割;当刀片切割速度较低时,酿酒葡萄枝将被推出刀片的工作区域。旋转式切割器无支承切割时刀片根部最低极限速度为30m/s,刀片切割速度应大于最低极限切割速度。根据夏季酿酒葡萄植物特性,刀片的切割速度取vc=40m/s[12]。刀盘在水平面内运动的速度分析如图6所示。设旋转刀中心为坐标原点O,刀片的根部为A点,刀盘逆时针转动角速度为ω,对A点进行速度分析,则有
(5)
式中 va—拖拉机前进速度,va=6km/h=1.67m/s;
vb—刀片线速度(m/s);
vc—刀片切割速度(m/s),取40;
r—刀片内端半径(m),取0.2。
理论分析可知:刀盘转速n≥1 830r/min时满足修剪要求,根据实际使用要求取n=2 000r/min。
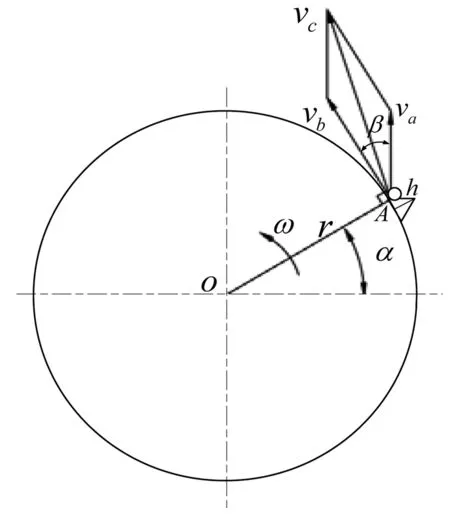
图6 切割速度分析Fig.6 Cutting velocity analysis
2.4 刀片数的确定
刀片的运动轨迹由多条余摆带所构成,单条带宽近似为刀片长度h=20mm。刀片数根据单位时间内拖拉机前进距离H与单位时间内m个刀片余摆带的纵向宽度之和相等而定。则
H=mh
(6)
H=60va/n
(7)
式中 m—刀片数(片);
H—余摆带纵宽之和,拖拉机行走路程(m)。
由式(6)、式(7)可知刀片数为
考虑到刀片的加工制造和运转平衡等问题,刀片数量确定为4片,刀盘转速确定为2 000r/min。
2.5 不漏割条件验算
刀片不漏割的条件为
(8)

所以,当拖拉机前进速度为6km/h、刀盘半径为200mm、刀片长度为20mm、刀片数量为4、刀盘转速为2 000r/min时,可保证刀片修剪时不产生漏割现象。
3 修剪装置液压系统设计
3.1 修剪装置液压原理图
酿酒葡萄修剪装置液压系统主要由液压泵、液压马达、液压油缸、减压阀和3个三位四通式换向阀等组成。方案原理图如图7所示。
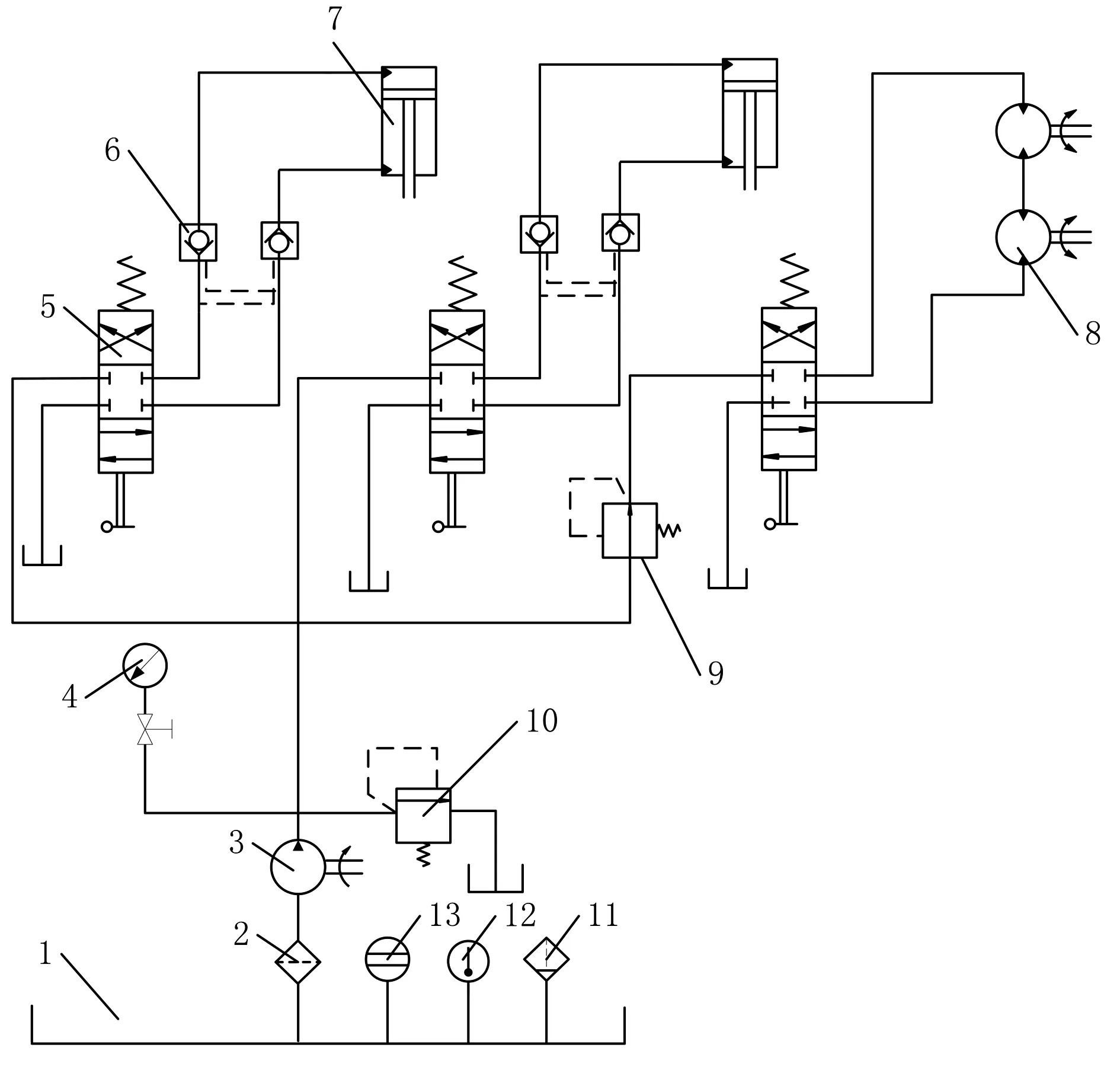
1.油箱 2.过滤器 3.液压泵 4.压力表 5.三位四通式换向阀 6.液控单向阀 7.液压油缸 8.液压马达 9.减压阀 10.溢流阀 11.空气滤清器 12.温度计 13.液位计图7 修剪装置液压系统原理图Fig.7 Hydraulic system schematic diagram of trimming device
酿酒葡萄修剪装置在进行修剪作业时,由拖拉机发动机带动液压泵工作,液压泵将发动机的机械能转化为液压能。当3个三位四通式换向阀都处于中位时,回油系统不起作用。通过单独控制两个液压油缸三位四通式的换向阀位置可以改变进入液压油缸的液压油方向,从而控制液压油缸的升降和左右移动,进而保证酿酒葡萄修剪装置的修剪高度和宽度的调节。减压阀可以有效地控制两串联液压马达的工作压力,保证两液压马达在额定的工作压力下工作。液压油缸支路两液控单向阀并联,可以有效地对液压油缸进行锁紧,保证修剪装置运行的安全性。
3.2 修剪装置液压系统仿真分析
AMESim为多学科领域的复杂系统建模与仿真平台,基于直观图形界面平台。在仿真过程中,仿真系统通过直观的图形界面展示出来。由于AMESim可以建立复杂的液压系统模型而被广大的用户应用于液压系统的设计当中[14]。
3.2.1 建立修剪装置液压系统回路模型
为验证修剪装置液压系统的可行性,根据酿酒葡萄修剪装置液压原理图,使用AMESim软件对修剪装置的液压系统建模。首先建立液压泵、液压马达、电磁换向阀、减压阀、控制信号、传感器和旋转负载等仿真模型,并连接各个液压元件构成完整的液压回路,如图8所示。
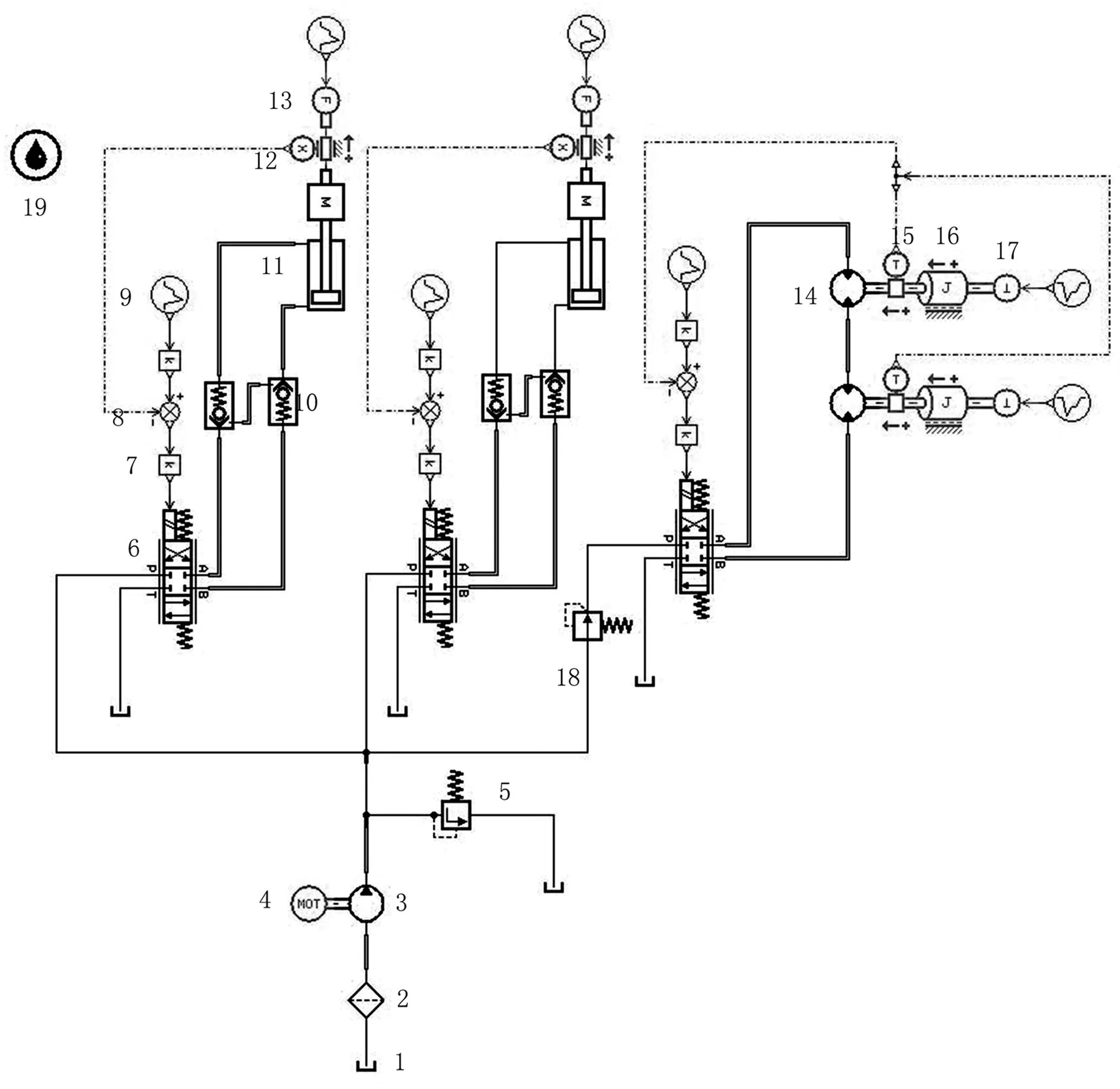
1.油箱 2.过滤器 3.液压泵 4.电动机 5.溢流阀 6.三位四通式电磁换向阀 7.电流信号系数 8.信号求和运算器 9.控制信号 10.液控单向阀 11.单活塞杆油缸 12.位移传感器 13.力传感器 14.液压马达 15.力传感器 16.旋转负载 17.转矩 18.减压阀 19.液压油图8 液压系统仿真模型图Fig.8 Simulation model of hydraulic system
3.2.2 仿真参数设置
在AMESim液压元件参数模式下,根据酿酒葡萄修剪装置液压系统设计参数设定仿真系统的主要数据值如表2所示。除主要元件外,其余参数按仿真软件默认值处理。
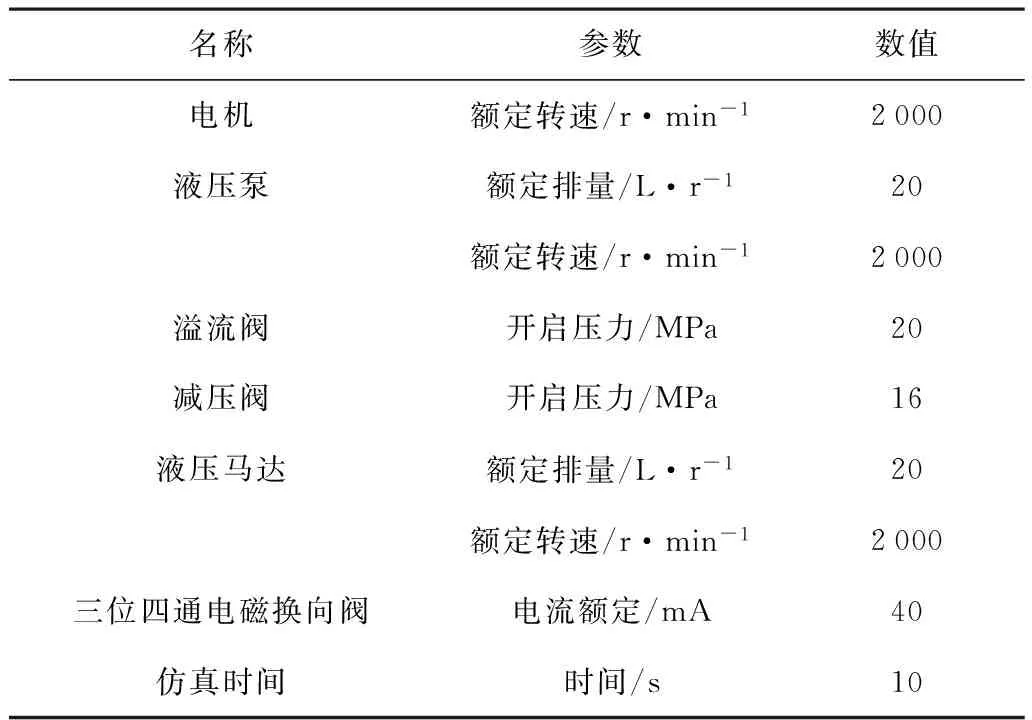
表2 仿真主要参数Table 2 Main parameters of simulation
3.2.3 仿真结果及分析
为了验证修剪装置液压系统模型的准确性和可靠性,根据实际情况,并结合修剪装置液压系统的特征,对修剪装置液压系统模型进行仿真分析。仿真起始时间设置为0s,运行时间设置为10s,时间间隔设置为0.01s,输入控制信号值,信号输出值(见图9),输入数据运行AMESim仿真。
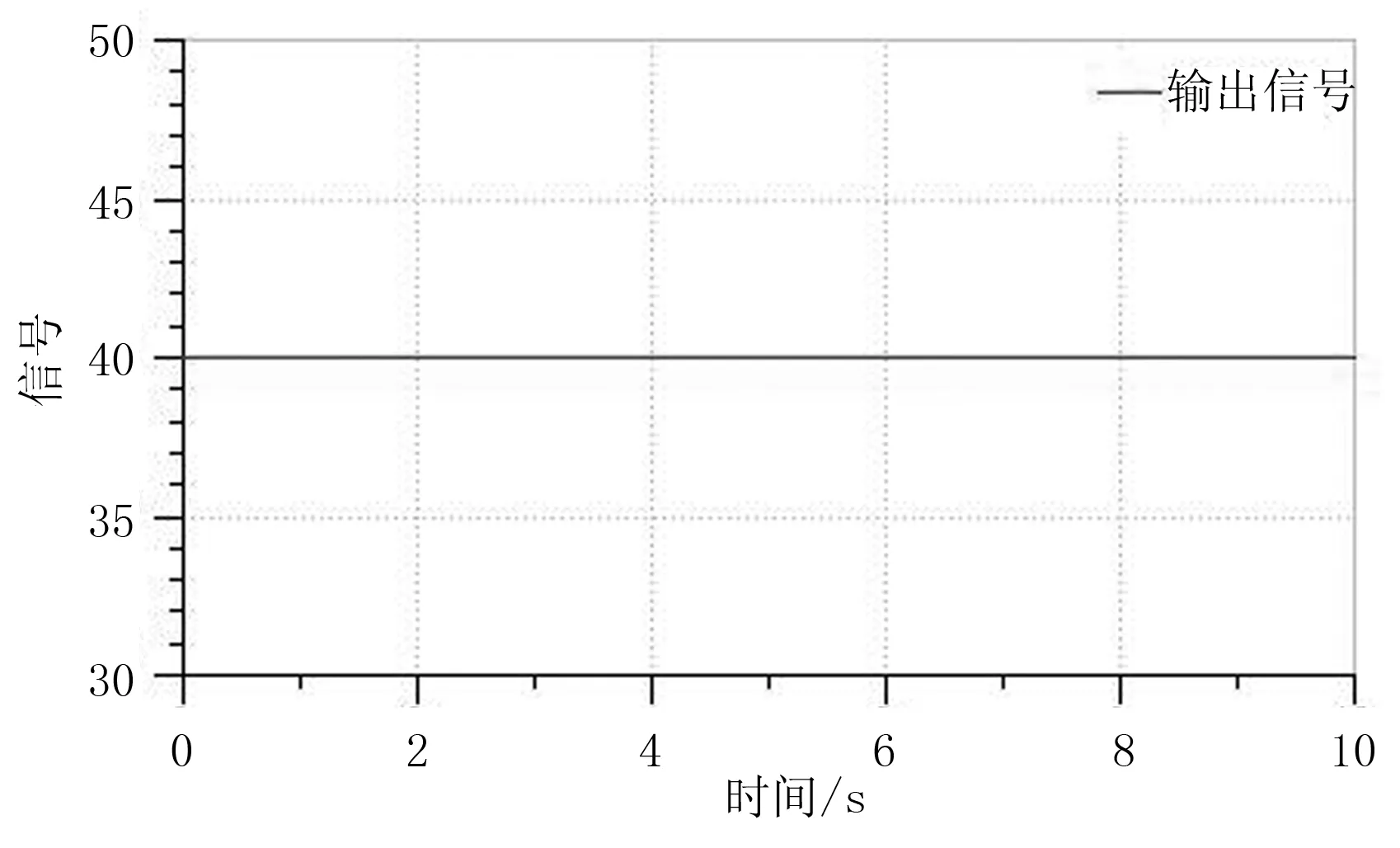
图9 信号输出曲线Fig.9 Signal output curve
液压马达为修剪装置的主要工作部件,利用AMESim仿真软件对液压马达进行仿真分析。由于修剪装置液压系统中两液压马达串联,两液压马达的流量和转速相同。由信号输出值控制电磁阀方向,使电磁阀处于开启状态。利用AMESim软件仿真后的液压马达流量和转速随时间变化曲线,如图10和图11所示。

图10 液压马达出口流量曲线Fig.10 Hydraulic motor export flow curve
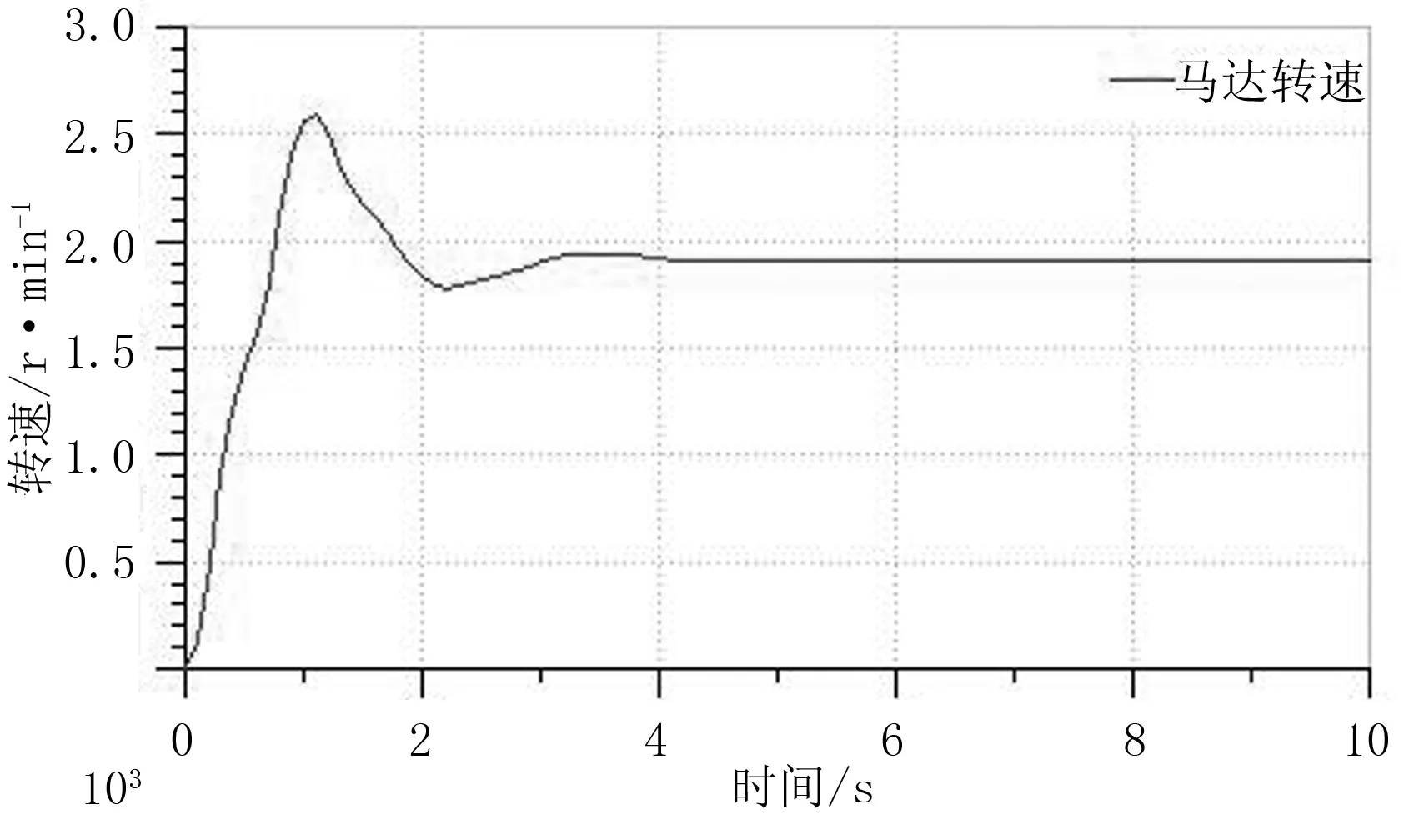
图11 液压马达转速曲线Fig.11 Hydraulic motor speed curve
由图10可以看出:当加载控制信号时,液压马达流量在0~2s出现波动,在2~4s时波动减小,并在第4s以后液压马达流量趋于稳定约为40L/min,此时液压马达转速为1 910r/min,满足酿酒葡萄修剪装置的旋转刀刀盘转速的设计要求,如图11所示。由于液压马达转速曲线波动较小,马达转速在设计的合理范围之内,验证了修剪装置液压马达模型设计的合理性。
4 结论
1) 根据新疆酿酒葡萄的种植模式和修剪要求,设计了拖拉机前悬挂式酿酒葡萄修剪装置,修剪高度可调、操作灵活,实现了酿酒葡萄的机械化修剪,为酿酒葡萄修剪装置的改进提供了依据。
2) 理论分析表明:当拖拉机前进速度为6km/h、旋转刀刀盘半径为200mm、刀片长度为20mm、刀片数量为4,以及旋转刀刀盘转速为2 000r/min时,满足酿酒葡萄的修剪要求。
3) 运用AMESim液压仿真软件建立酿酒葡萄修剪装置液压系统模型,对液压元件参数进行设置,进行修剪装置液压系统仿真分析。仿真结果表明:液压马达流量为40L/min,马达转速达到1 910r/min,满足酿酒葡萄修剪装置的旋转刀刀盘转速的设计要求。
[1] 王旭,张建国,赵思东.我国南方葡萄栽培历史、现状与前景[J].中国果业信息,2005(9):7-9.
[2] 成晨.中国酿酒葡萄种植面积超法国居世界第二[N].中国贸易报,2015-04-30(002).
[3] 尚静.新疆高校首个葡萄与葡萄酒学院成立[N].新疆科技报(汉),2015-10-28(001).
[4] 张丽军.酿酒葡萄整形修剪技术[J].农村科技开发,2004(1):11.
[5] 马起林,姜润丽.酿酒葡萄生长季修剪技术[J].西北园艺(果树),2014(1):19.
[6] 朱顺云.葡萄修剪技术[J].现代农业科技,2010(2): 154-157.
[7] 赵云.夏季葡萄修剪要点[N].中国特产报,2004-06- 21(003).
[8] 徐丽明,邢洁洁,李世军,等.国外葡萄生产机械化发展和对我国现状的思考[J].河北林业科技,2014(Z1): 124-128.
[9] 尚书旗,王东伟,鹿光耀.我国葡萄机械化生产现状与发展趋势[J].农机科技推广,2014(5):7-9.
[10] 马起林,姜润丽.酿酒葡萄生长季修剪技术[J].西北园艺(果树),2014(1):19.
[11] 姜润丽,马起林,赵洪康.篱架酿酒葡萄单干双臂整形修剪技术[J].烟台果树,2006(4):43-44.
[12] 中国农业机械化科学研究院.农业机械设计手册:下册[K].北京:中国农业科技出版社,2007:1143-1145.
[13] 刘伟峰,康德福,米柏林,等.高效大型旋转式牧草收割机的研制与试验[C]//中国农业机械学会.农业机械化与新农村建设—中国农业机械学会2006年学术年会论文集(上册),中国农业机械学会,2006:4.
[14] 付永领,祁晓野.AMESim系统建模和仿真-从入门到精通[M].北京:北京航空航天大学出版社,2006.
[15] 赵满全,张宁,杨铁军,等.双圆盘割草机切割器虚拟样机设计与试验[J].农业机械学报,2014(8):101-105.
[16] 龙魁,刘进宝,张静,等.葡萄修剪机械的发展现状和趋势[J].农机化研究,2014,36(3):246-248.
[17] 陈仁敏.葡萄修剪机[J].粮油加工与食品机械,1984 (10):40-42.
[18] Cesare Intrieri,llaria Filippetti.A new grape trai- -ning system to suit machine pruning[J].Grapegrower & Winemaker,2012(4):41-48.
[19] Spinelli R,Lombardini C,Pari L,et al.An alternative to field burning of pruning residues in mountain vineyards [J].Ecological Engineering,2014,70:212-216.
The Design of the Wine Grape Trimming Device
Wang Zhe, Wang Lihong, Fu Wei, Jiang Yinglan, Kan Za, Li Chengsong
(College of Mechanical and Electrical Engineering,Shihezi University,Shihezi 832000,China)
Wine grape pruning operations directly affect the yield and quality of wine grapes.In this paper,according to the problems of labor intensity,low efficiency and high cost of Xinjiang wine grape,a wine grape trimming device is designed in combination with the planting pattern and trimming requirements of Xinjiang wine grape.Trimming device structure and working principle of the machine is introduced in this paper,and the motion analysis of rotating cutter.The theoretical analysis shows that when the speed of the tractor is 6km/h, the rotating cutter head radius is 20mm, the blade height of 20mm, number of blade is 4, the rotational speed of rotating cutter head for 2000r/min,the trimming device can meet the requirements of wine grape pruning. Through the hydraulic simulation software AMESim simulation analysis was carried out on the pruning device of the hydraulic system, proved the feasibility of pruning device of the hydraulic system.
wine grapes; trimming device; rotating cutter head; design; hydraulic system; simulation analysis
2016-03-03
国家自然科学基金项目(51465051)
王 哲(1991-),男,新疆塔城人,硕士研究生,(E-mail)wz_shzu@163.com。
王丽红(1975-),女,河北邯郸人,教授,博士,(E-mail)wlh_shz@163.com。
S224.1+49
A
1003-188X(2017)03-0105-06
