深松、铺管、施肥一体铲的动力学建模与分析
2017-12-16张闯闯张晙辉刘存祥曹丽芳王同朝
张闯闯,张晙辉,刘存祥,曹丽芳,王同朝
(1.河南农业大学 a.机电工程学院; b.农学院,郑州 450002;2.河南工程学院,郑州 451191)
深松、铺管、施肥一体铲的动力学建模与分析
张闯闯1a,张晙辉2,刘存祥1a,曹丽芳1a,王同朝1b
(1.河南农业大学 a.机电工程学院; b.农学院,郑州 450002;2.河南工程学院,郑州 451191)
建立了深松、铺管、施肥一体铲的动力学模型,并进行了仿真分析。深松、铺管、施肥一体铲是一种具有深松、犁底层下铺渗灌管及施肥的多功能联合作业铲。依据一体铲的工作原理,建立了一体铲在工作时所受到的水平阻力模型,该阻力由深松、铺管和施肥3部分的水平阻力构成。将一体铲三维模型导入ADAMS仿真软件中进行了动态仿真,主要分析了工作深度和行走速度对水平工作阻力的影响。结果表明:一体铲的水平工作阻力与拖拉机的行走速度成抛物线函数关系;一体铲的水平工作阻力与工作深度近似于成正相关的线性函数关系。通过对一体铲的动力学建模与分析,为进一步设计、改进一体铲提供了参考依据。
一体铲;动力学建模;深松;铺管;施肥
0 引言
在旱地保护性耕作技术体系中,深松作为一项少耕措施,已经广泛地应用在农业生产中[1]。深松可以改善耕层土壤结构,活化犁底层,提高土壤蓄水与作物抗旱、抗倒伏能力,能减少环境污染,增加农作物的产量,实现农业可持续发展[2]。传统人工撒施的肥料撒在土壤表层,不能被根系很好地吸收,肥料利用率低,污染环境[3];而机械化施肥(施化肥位置一般在土壤表层以下6~10cm的深度[4])可以减少人工施肥所带来的不利方面,有助于生产率的提高。深层渗灌是一种很有特色的节水灌溉方法,具有输水损失小、减少表土水分蒸发,促进根系下扎,一次铺管能使用多年,对温室则能减少室内湿度,不破坏土壤结构、便于中耕和液态施肥等独特的优点[5-6]。目前,国内对这3方面的单独研究或者两者结合研究的颇多,而将三者结合的技术研究鲜有报道。因此,在结合课题组深松、深铺渗灌管、施肥复合作业机的研制基础上[7],进一步深入分析一体铲的工作参数对于工作阻力的影响,为以后的优化机械结构及提高整机的生产效率提供依据。
1 一体铲的结构组成及工作原理
一体铲由深松铲刀 、连接固定部分、导管圆、施肥管、施肥固定板及铲柄等组成,如图1所示。深松铲刀通过内六方沉头螺钉与铲柄连接,铲柄通过U型螺栓与机架固定,铲柄上有可以调节深松、铺管深度的圆孔;施肥管与施肥固定板通过螺栓固定,施肥固定板上有调节孔,可以改变施肥的深度。该一体铲具有结构简单、调节安装方便,工作稳定、铲头磨损后易于更换等优点。

1.深松铲刀 2.连接固定部分 3.导管圆管 4.施肥管 5.施肥固定板 6.铲柄图1 一体铲的示意图Fig.1 Structure diagram of the integrated shovel
工作时,在拖拉机牵引下,机架带动一体铲向前运动,完成深松、铺管、施肥一体化作业。随着一体铲的前进,深松铲刀和铲柄剪切并松动土壤;深松铲刀穿破犁底层后,深松铲刀侧面、铲柄与土壤间产生摩擦及土壤内部件间的摩擦,在速度梯度的影响下使得土壤破碎;渗灌管从导管圆管中穿出后方向转为水平方向,铺设到了深松铲开出的犁沟内;排出来的肥料经排肥管进入施肥管施到地下一定深度。
2 一体铲的动力学建模
工作时,一体铲所受到的水平工作阻力是影响农业生产的重要因素。深松、铺管、施肥一体铲的水平工作阻力由深松、铺管和施肥3部分的水平阻力组成,大小等于各自水平工作阻力的代数和。
2.1 深松部分的水平工作阻力
一体铲的深松部分主要由铲刀和铲柄两部分组成,铲刀为平面矩形,在铲刀前方有下磨刃,铲刀和铲柄用两个沉头螺钉连接。该铲刀工作阻力小,结构简单,强度高,磨损后很容易更换[8]。根据该结构的组成,其水平工作阻力主要包括深松铲刀受到的水平工作阻力和弧形铲柄受到的水平工作阻力两部分,故有
F深松=F1+F2
(1)
式中 F1—深松铲刀受到的水平工作阻力;
F2—弧形铲柄受到的水平工作阻力。
2.1.1 深松铲刀的受力分析

F=N1sinα+uN1cosα+ib
(2)
式中 F—铲刀所受的水平牵引力;
N1—作用到倾斜耕作部件的法向载荷;
u—土壤与金属的摩擦因数;
i—单位幅宽土壤的纯切削阻力;
b—深松铲刀面宽度;
α—深松铲入土角。

图2 铲面受力分析Fig.2 Surface force analysis of the shovel
土壤的纯切削阻力是很小的,一般总阻力中的切削阻力可以忽略不计,只有当土壤中受到石头等大的阻力或部件刃口变钝时切削阻力才显得重要[11]。铲刀面所受的水平牵引力F与铲刀面所产生的水平工作阻力F1大小相等,方向相反,故有
F1=N1sinα+uN1cosα
(3)
根据深松机深松铲动力学分析[11]进一步求解铲刀面所产生的水平工作阻力F1得
(4)
其中,G、z、t、B的计算如下
u′=tanφ
式中 C—土壤内聚力;
ρ—深松铲刀上部土壤密度;
d—耕深;
β—深松铲刀上部土壤前失效面的倾角;
L—铲面长度;
u′—土壤內摩擦因数;
φ—土壤内摩擦角;
v—工作部件速度。
2.1.2 弧形铲柄的受力分析
弧形铲柄采用强度等级较高的螺栓与机架相连,连接简单、可靠[12],弧形铲柄的结构如图3所示。结合深松铲受力数学模型与计算机模拟[13]中所做的研究,耕深在270~335mm时,弧形铲柄受到的水平工作阻力为
(5)
式(5)中各参数的公式计算如下
式中 h—铲柄厚度;
c—铲柄侧面宽度;
η—弧形铲柄切刀楔角;
δ—土壤与金属摩擦角;
r—铲柄弧半径;
S0—耕深在200mm以上的切刀锲刃的面积;
S1—耕深在200mm以下的切刀锲刃的面积;
S2—切刀侧刃的面积。

图3 弧形铲柄的结构图Fig.3 Structure diagram of arc shovel handle
联立式(4)、式(5)得
(6)
此外,土壤弹性变形应力Kel与土壤比压K2有如下关系
(7)
Kostritsyn通过试验得出,在土壤变形量大干30mm时,Kel接近0.0045N/mm2。
2.2 铺管部分的水平工作阻力
根据铺管的工作原理可知:在铺管时产生的水平工作阻力主要包括土壤对导管圆管的摩擦力和渗灌管对导管圆管的水平阻力,则
F铺管=F3+F4
(8)
式中 F3—土壤对导管圆管的摩擦力;
F4—渗灌管对导管圆管的水平阻力。
在一体铲向前移动时,土壤沿着导管圆管的圆柱表面滑动,接触面积为耕深下导管圆管表面积的1/2。导管圆管的受力分析如图4所示,故有
F3=fv1N3=kuN3
(9)
式中 fv1—导管圆管与土壤接触面为圆柱面时的当量摩擦因数;
k—与接触面接触情况有关的因数;
u—土壤与金属的摩擦因数;
N3—土壤对金属的压力。
图4 导管圆管的受力分析Fig.4 force analysis of the circular pipe
根据T.H西涅阿可夫[14]提出的关于土壤受力状态的比阻和比压概念,故有
N3=K2S3
(10)
式中 S3—导管圆管与土壤接触的面积。
根据图4的结构可知,在导管圆管转弯处以下(即耕深111mm以下),当导管圆管半径R3为16mm时,其表面积为18 952mm2,故S3的计算如下
(11)
联立式(9)~式(11),可得
(12)
其中,T为渗灌管受到的拉力;N4为导管圆管对渗灌管的压力。因为渗灌管为柔性体,F4大小等于渗灌管受到的拉力与摩擦力的代数和,故有
F4=T+u0N4
(13)
由渗灌管受力平衡,可得
Tcos45o+F4sin45°=N4
(14)
联立式(13)和式(14),可得
F4=(2+u0cos45°/2-u0sin45°)T
(15)
式中 u0—渗灌管与导管圆管的摩擦因数。
由于铺管时,渗灌管管盘内部各质点间基本没有相对运动,且质量分布较为均匀,管带上的拉力处处相等,运用刚体运动学理论对其进行分析。
由刚体绕定轴转动微分方程,可得
(16)
式中 Jz—刚体对于管盘转动轴的转动惯量;
ω—角速度;
∑Mz(F)—各主动力对管盘转动轴形成的力矩。
(17)
将式(17)代入式(16),可得
(18)
将式(18)代入式(15),可得
(19)
联立式(8)、式(12) 、式(19),可得
(20)
2.3 施肥管的水平工作阻力
肥料从施肥管中流出,会对管壁产生冲击 力,由于这部分的作用力很少,在计算水平工作阻力时,将这部分作用力忽略不计,只考虑土壤对施肥管的摩擦力。
在一体铲向前移动时,土壤沿着施肥管的圆柱表面滑动,接触面积为耕深下施肥管表面积的1/2(施肥管从底端到高度55mm的这段管壁与土壤接触很少,可以忽略),施肥管的受力分析如图5所示,故有
F施肥=fv2N5=kuN5
(21)
式中 fv2—施肥管与土壤的接触面为半圆柱面时的当量摩擦因数;
N5—土壤对导管圆管的压力。
根据T.H西涅阿可夫[14]提出的关于土壤受力状态的比阻和比压概念,故有
N5=K2S5
(22)
式中 S5—施肥管与土壤接触的面积。
根据图5的结构可知,由于施肥管可以调节,当将施肥管固定距离铲刀底面250mm、导管圆管半径为R5时,S5的计算如下
(23)
联立式(21)~式(23),可得
(24)
图5 施肥管的受力分析Fig.5 Force analysis of the fertilizer tube
3 一体铲的动力学仿真
在鹤壁市农科院的试验地上,选用东方红拖拉机LX954进行一体铲的试验。由于时间和条件的限制,试验区为一块长度为300m、宽度为150m的小麦秸秆田,且仅对一种土壤进行了试验。在长度300m的试验田上,前20m为入土非稳定区,后20m为出土非稳定区。土壤的数据:土壤含水量12%;土壤密度1.8g/cm3;土壤内摩擦因数0.45;土壤与钢的摩擦因数0.9;土壤内聚力23kN/m2。
一体铲的结构参数:铲面入土角25°;铲面宽度60mm;铲面长度165mm;铲柄侧面宽度70mm;铲柄厚度25mm;铲柄切刀楔角85°;导管圆管半径16mm;铲柄弧半径284mm;施肥管半径16mm;渗灌管与金属的摩擦因数1.0。
用于铺管的带卷,其质量和半径随时间发生变化,且工作过程中带卷的角速度是变化的,参数变化量较多。参阅马铃薯播种铺管机滴管带浅埋装置的设计与研究[15]和滴管带拉伸性能分析[16],结合公式(18)进行相关分析可知:在滴灌带盘直径550mm、管型为以色列耐特菲姆Ls60F-1.32L型内镶式软型滴灌带时,拖拉机在启动瞬间渗灌管拉力约为70N;行驶速度基本稳定在地块中时渗灌管拉力约为40N;行驶在地头瞬间停止时约为50N。结合实际生产效果,一体铲的动力学仿真中渗灌管拉力选为40N。
将在SolidWorks中建立的一体铲三维模型,导入至ADAMS中,将铲刀与铲柄、导管圆管与铲柄、施肥管和导管圆管间添加固定约束副,在铲柄和大地之间添加水平移动副。根据一体铲的工作阻力F总=F铺管+F施肥+F深松,在铲刀的质心处添加水平阻力F1;在铲柄质心处添加水平阻力F2,在导管圆管质心处添加水平阻力F3,转弯水平处添加水平阻力F4;在施肥管质心处添加水平阻力F5,添加完约束和载荷后,设置仿真器,对一体铲进行动力学仿真分析。
3.1 行走速度对一体铲水平工作阻力的影响
在工作深度为270、290、310、330mm时,改变拖拉机的行走速度,得出一体铲水平工作阻力与速度变化的曲线图如图6所示。
图6 一体铲水平工作阻力与速度变化的曲线图Fig.6 Curves of working resistance with velocity variation
从图6中可以得出:在工作深度为270mm时,一体铲的水平工作阻力为935~1247N;在工作深度为290mm时,一体铲水平的工作阻力为1 022~1 357N;在工作深度为310mm时,一体铲的水平工作阻力为1 103~1 462N;在工作深度为330mm时,一体铲的水平工作阻力为1 181~1 563N。在一定的工作深度下,一体铲的水平工作阻力与拖拉机的行走速度成抛物线函数关系,随着行走速度的增大,水平工作阻力会增大;工作深度的增加,水平工作阻力也会增大。在低速区,Ⅰ挡时拖拉机的行走速度为2.17km/h,一体铲的水平工作阻力较小,但行走速度过慢,生产效率不高;Ⅲ挡时拖拉机的行走速度为4.15km/h,一体铲的水平工作阻力已经明显增大,过多地消耗了能源;Ⅱ挡时拖拉机的行走速度为3.36km/h,行走速度适中,一体铲的水平工作阻力也不大。根据生产的实际状况,通常选择在Ⅱ挡时拖拉机的行走速度工作。
3.2 工作深度对一体铲水平工作阻力的影响
在给定拖拉机的行走速度为3.36km/h时,改变一体铲的工作深度,得出一体铲水平工作阻力与工作深度变化的曲线图如图7所示。
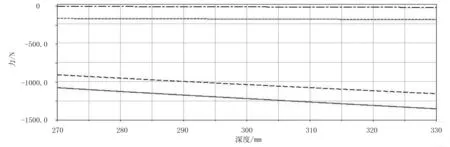
图7 一体铲水平工作阻力与工作深度变化的曲线图Fig.7 Curves of working resistance with working depth variation
从图7中可以得出:当工作深度由270~330mm变化时,施肥所产生的水平工作阻力为5~19N、铺管所产生的水平工作阻力为165~179N,与工作深度成线性关系;深松所产生的水平工作阻力为905~1154N,是工作深度的一次、二次幂函数和反正弦三角函数的叠加;一体铲的水平工作阻力为1 075~1 352N,是工作深度的一次、二次幂函数和反正弦三角函数的叠加。由于二次幂函数和三角函数对一体铲的水平工作阻力曲线影响相对较小,一体铲的水平工作阻力与工作深度近似于成正相关的线性函数。
4 结论
1) 通过对一体铲动力学模型的建立和在ADAMS软件中进行的仿真模拟,可以得出:在一定的工作深度下,一体铲的水平工作阻力与拖拉机的行走速度成抛物线函数关系,随着行走速度的增大,水平工作阻力会增大;工作深度的增加,水平工作阻力也会增大;在一定的行走速度下,一体铲的水平工作阻力是工作深度的一次、二次幂函数和反正弦三角函数的叠加。由于二次幂函数和三角函数对一体铲的水平工作阻力曲线影响相对较小,一体铲的水平工作阻力与工作深度近似于成正相关的线性函数。
2)在模拟中,除了工作深度和拖拉机行走速度对一体铲的水平工作阻力有影响外,还有一体铲的结构参数和土壤参数也会对一体铲的水平工作阻力有影响,建立的一体铲动力学模型反映了这些因素对其水平工作阻力的函数关系,为优化一体铲提供了参考依据。
3)由于在分析铺管所产生的水平工作阻力时,管盘直径和质量会随着时间的改变而变化,且工作过程中角速度是变化的,参数变化量较多,建立的微分方程在求解时比较复杂,这部分理论方法仍需要进一步的改进和完善。
[1] 李洪文,陈君达,李问盈.保护性耕作条件下深松技术研究[J].农业机械学报,2000,31(6):42-43.
[2] 张绍军.3种深松铲对深松作业效果影响研究[J].农业科技与装备,2012(6):23-24
[3] 李建南.机械化施肥技术发展现状与思考[J].江苏农机化,2014(5):31-32.
[4] 杜峰,李涛.机械化深施肥技术问题[J].农业科技与信息,2009(7):20-21.
[5] 谢森传, 张思聪, 惠士博.土壤水分运动对渗灌技术的影响研究[J].灌溉排水,2002,21(1):1-2.
[6] 王淑红,张玉龙,虞娜,等.保护地渗灌管的埋深对土壤水盐动态及番茄生长的影响[J].中国农业科学,2003,.36(12):1508-1509.
[7] 魏玉刚,刘存祥,王同朝,等.深松、深铺渗灌管、施肥复合作业机的研制[J].农机化研究,2015,37(2):140-142.
[8] 陈坤,胡晓丽,赵新子,等.国内外深松铲研究现状与展望[J].农业与技术,2010,30(3):30-31.
[9] Harrison H P.Soil reacting forces for a bentleg plow[J].Transactions of the ASAE,1988,31(1):47-50.
[10] 余泳昌,刘文艺,赵迎,等.立柱式深松铲受力数学模型及试验分析[J].农机化研究,2007,23(6):109-113.
[11] 徐峰,王蔚,孙卓,等.深松机深松铲动力学分析[J].价值工程,2011,30(25):42-43.
[12] 陈实,张喜瑞,梁栋,等.圆弧深松铲两种安装方式的仿真分析与探讨[J].农业工程学报,2015(3):72-73.
[13] 周玉乾.深松铲受力数学模型与计算机模拟[D].郑州:河南农业大学,2006.
[14] T.H西涅阿可夫,H.M潘诺夫.土壤耕作机械的理论和计算[M].北京:中国农业机械出版社,1981.
[15] 陈伟.马铃薯播种铺管机滴管带浅埋装置的设计与研究[D].呼和浩特:内蒙古农业大学,2011.
[16] 何秀成.滴管带拉伸性能分析[J].设计制造,2012(2):47-48.
Dynamic Modeling and Analysis of the Integrated Shovel of Subsoiling,Pipe Laying and Fertilizing
Zhang Chuangchuang1a, Zhang Junhui2, Liu Cunxiang1a, Cao Lifang1a, Wang Tongchao1b
(1.a.College of Mechanical and Electrical Engineering;b.Agronomy College, Henan Agricultural University, Zhengzhou 450002, China; 2.Henan University of Engineering, Zhengzhou 451191, China)
In this paper, a dynamic model of the integrated shovel of subsoiling, pipe laying and fertilizing was established and analysed.The integrated shovel of subsoiling, pipe laying and fertilizing was a multifunctional combined working shovel ,which could deep loose,lay pipe under under the plough,and fertilize.According to the working principle of the integral shovel, the horizontal working resistance model of the integral shovel was established,which was composed of three parts that were the resistance of subsoiling, pipe laying and fertilizing application.Three dimensional model was introduced into the ADAMS simulation software for dynamic simulation and the influence of working depth and walking speed on the horizontal working resistance was mainly analyzed.The results show that the horizontal working resistance of the shovel was a parabolic function relationship with the walking speed of the tractor and are similar to the linear function of the positive correlation with the working depth.Through the dynamic modeling and analysis of the integrated shovel, it provided a reference for further design and improvement.
integrated shovel; dynamic modeling; subsoiling; pipe; fertiling
2016-02-04
河南省科技攻关计划项目(142102110055)
张闯闯(1988-),男,河南信阳人,硕士研究生,(E-mail)zcc31419@163.com。
刘存祥(1958-),男,河南滑县人,教授,(E-mail)13598881238@139.com。
S222.5+2
A
1003-188X(2017)03-0068-06
