新型香蕉种植开坑机的结构设计与仿真分析
2017-12-16娄玉印
娄玉印,张 林
(1.广西科技大学鹿山学院,广西 柳州 545000;2.山东交通学院,济南 250357)
新型香蕉种植开坑机的结构设计与仿真分析
娄玉印1,张 林2
(1.广西科技大学鹿山学院,广西 柳州 545000;2.山东交通学院,济南 250357)
基于降低减轻人力成本、提高劳动效率的原则,研发了一种可控连杆式三自由度香蕉种植开坑机。首先,通过基于旋量理论为基础的自由度公式,计算出可控香蕉种植开坑机自由度;其次,运用闭环矢量法建立了可控香蕉种植开坑机的运动学方程,得出其运动学特性;最后,结合多体动力学理论及ADAMS软件,对可控香蕉种植开坑机进行仿真分析,得出其发动机运动特性,进而验证了该新型结构的合理性和可行性。
香蕉种植开坑机;自由度;闭环矢量;仿真
0 引言
香蕉种植开坑机研制缺乏,香蕉种植作业多采用拖拉机翻犁之后,再人工开坑放入香蕉苗。该劳动方式工作强度高、劳动效率低,降低了香蕉种植的速度;而采用拖拉机翻犁的作业方式机器成本高,且翻犁机器采用三点悬挂式与拖拉机连接,导致拖拉机振动振幅大、噪声大,极大地影响工作人员的舒适性和整机的平顺性,因此研制香蕉种植开坑机成为农业机械中的重中之重。
首先,针对香蕉种植开坑机研制缺乏的现状,研发了一种新型可控连杆式香蕉种植开坑机。该香蕉种植开坑机具有挖坑质量高、挖坑速度快、安全可靠及成本低等特点。本文通过基于旋量理论为基础的自由度公式,计算出可控连杆式香蕉种植开坑机自由度;其次,针对其结构特点,运用闭环矢量法建立了可控香蕉种植开坑机的运动学方程,获得机构输入与输出运动学特性;最后,根据多体动力学理论结合动力学分析软件ADAMS,对新型可控连杆式香蕉种植开坑机进行仿真分析,得出其电动机运动特性。进而验证了该新型结构的合理性和可靠性,结果表明:该新型可控香蕉种植开坑机能够满足工作性能,具有一定的可行性和推广价值[1]。
1 结构分析
本新型可控连杆式香蕉种植开坑机包括行走机构、动力驱动机构、垂直度调节机构及挖坑机构,如图1所示。
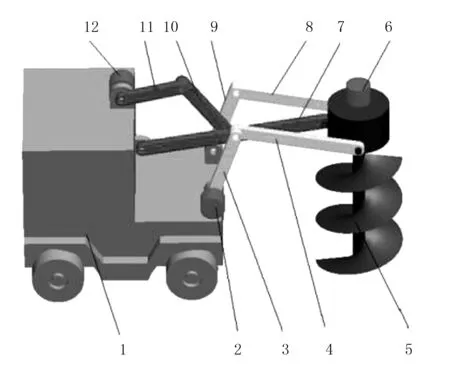
1.行走机构 2.电动机1 3.第1连杆 4.第2连杆 5.螺旋刀盘 6.电动机2 7.动臂 8.第3连杆 9.第4连杆 10.第5连杆 11.第6连杆 12.电动机3图1 可控香蕉种植开坑机结构图Fig.1 The structure of controllable banana planting open pit machine
行走机构选用独立的柴油机作为动力,不受使用地点的限制,对不同坑深要求、地形变化和土壤硬度等条件均能具有较强的适应性和可行性。动力驱动机构包括电动机3、第5连杆、第6连杆及动臂;垂直度调节机构包括电动机1、第1连杆、第2连杆、第3连杆及第4连杆;挖坑机构包括电动机2、螺旋刀盘。工作时,电动机3控制挖坑机构的上下运动,电动机1调节挖坑机构垂直度,保证挖坑质量;电动机2带动刀盘做螺旋运动,完成挖掘作业[2-3]。该香蕉种植开坑机具有自动挖坑、挖坑垂直度好、结构可靠、稳定性好、噪声小、效率高、适应性强且移动方便等特点,易于推广使用。
2 挖坑机构自由度分析
2.1 旋量简介
任意刚体的运动形式都可以理解为旋量运动形式,即绕某轴的旋转和绕某轴的移动的合成运动[4]。旋量由两个对偶矢量组成,即原部矢量s和对偶部矢量s0,记为$=(s;s0)。其中,s0=r×s+hs,s为轴线方向的单位矢量,则有
s=(L,M,N), L2+M2+N2=1
如图 2所示,r1为轴线的一点,r为轴线的任意一点,则轴线的方程为(r-r1)×s=0,r1为轴线通过的确定点,r 是旋量轴线上的任意点, 则轴线方程为
(r-r1)×s=0
即r×s=r1×s=s0,s0称为轴线相对于原点的线矩。 轴线的方向和位置分别由方向矢量 s 和线矩 s0确定。
反螺旋:当旋量$1和旋量$2构成互易积为零时,$1·$2=0,称旋量$2是旋量$1的反旋量。
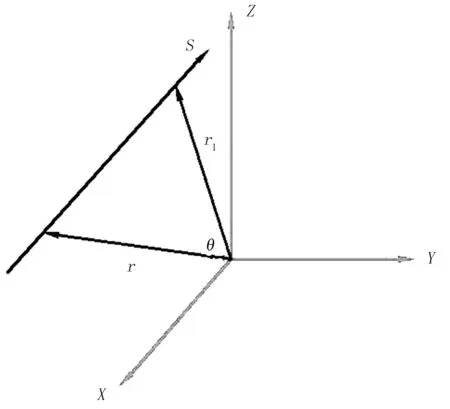
图2 旋量运动简图Fig.2 The screw motion diagram
2.2 机构建模分析
建立新型香蕉种植开坑机旋量系结构图如图3所示。该新型机构包括3条支链,第1支链包括R11、R12、R13,建立坐标系O-X1Y1Z1;第2支链包括R21、R22、R23建立坐标系O-X2Y2Z2;第3支链第3条支链R31、R32,并包括R33、R34、R35一条支链,并且各转动副相互平行,建立坐标系O-X3Y3Z3。
2.3 各支链旋量分析
1)第1条支链为
$11:(0 1 0;0 0 0)
$12:(0 1 0;0 0 X12)
$13:(0 1 0;-Z130 0)
反螺旋为
此螺旋系的最大线性无关数rank($R11R12R13)=4,为四系螺旋。

图3 新型香蕉种植开坑机旋量系结构图Fig.3 The screw system Structure of Controllable banana planting open pit machine
2)第2条支链为
$21:(0 1 0;0 0 0)
$22:(0 1 0;0 0 X22)
$23:(0 1 0;-Z230 0)
其反螺旋为
此螺旋系的最大线性无关数rank($R21R22R23)=4,为四系螺旋。
3)第3支链。对于第3支链为含有R31、R33、R34、R35组成的4R子链,此子链为阶数为3的平面机构,故不能直接通过自由度公式计算,先需转化为广义等效运动副,再计算自由度。
将动臂看成动平台,选坐标系为沿动臂杆长的方向为Z轴,则支链的运动旋量系为
$31:(0 1 0;0 0 0)
$33:(0 1 0;X330 Z33)
$34:(0 1 0;X340 Z34)
$35:(0 1 0;X350 Z35)
进而得到动臂广义运动副等效运动输出,其基为
则第3条支链旋量可写为
$32:(0 1 0;0 0 X32)
其反螺旋为
2.4 自由度分析
由上述反螺旋可知:有8个反螺旋作用于挖坑机构上,其公共约束λ=3,不存在冗余约束,即ν=0;用等效运动副转化后,闭链子链等效变换后为7杆8副。
根据自由度计算公式[4-5]得
(1)
式中 M—机构自由度;
d—机构的阶数,d=6-λ=3,λ为机构的公共约束数,数值为3;
n—包括机架在机构数目,n=7;
g—机构运动副数目,g=8;
fi—第i个运动副数目,∑fi=8;
ν—机构冗余数目,ν=0;
ξ—机构局部自由度数目,ξ=0;
由于挖坑机在工作过程中为转动运动,即新型香蕉挖坑机总的自由度数为3。
3 运动学分析
3.1 位置分析
建立结构简图如图4所示,其中θ1,θ4,θ6为已知角。
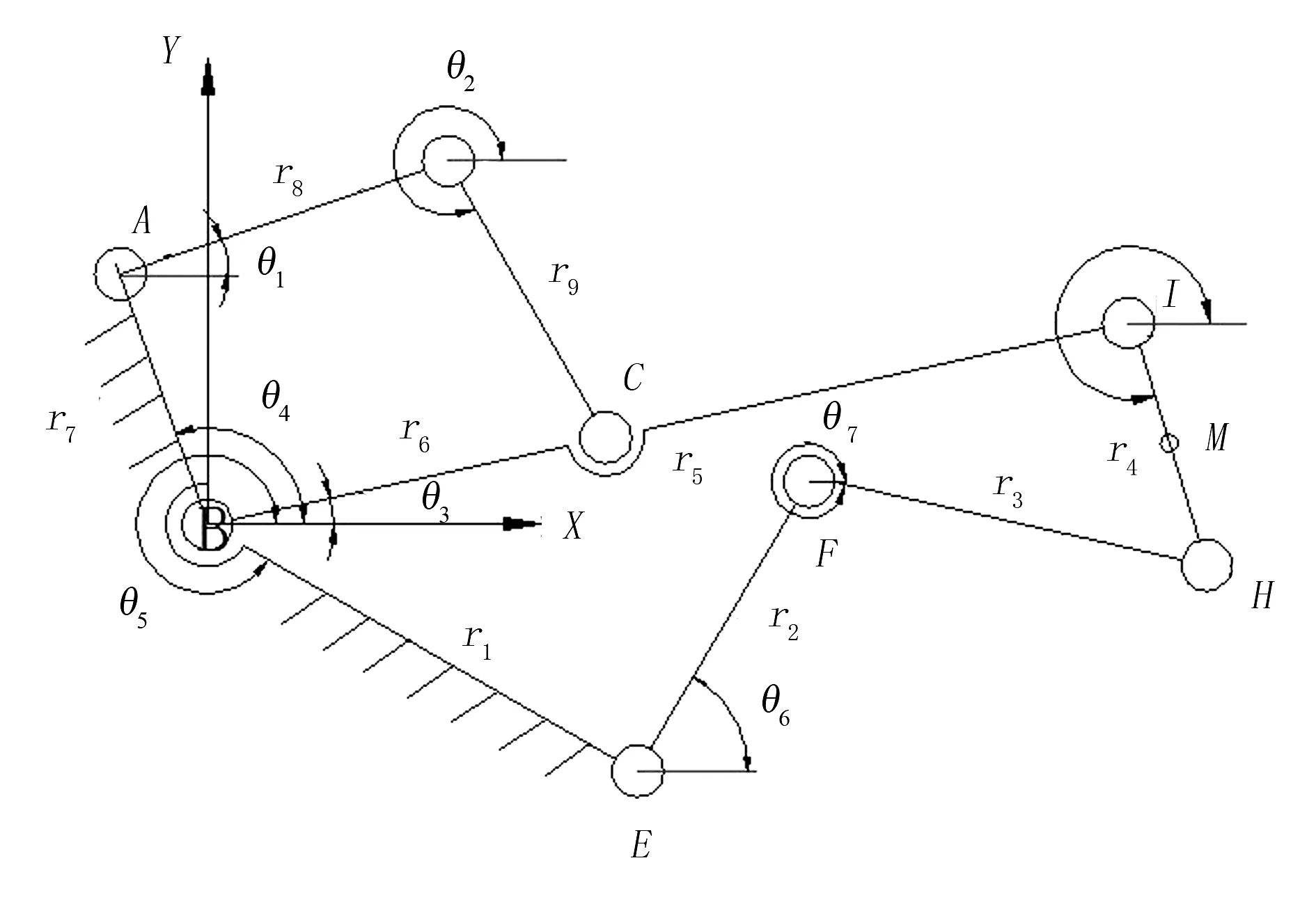
图4 新型香蕉种植开坑机矢量图Fig.4 The new type of banana planting
3.1.1 对四连杆ABCD分析
四连杆ABCD矢量封闭方程公式为
r8+r9=r7+r6
(2)
将式(2)两边各自平方得
r9·r9=(r7+r6-r8)·(r7+r6-r8)
(3)
将式(3)展开得
(2r6r8sinθ1-2r6r7sinθ4)sinθ3+
(4)
令
A=2r6r8sinθ1-2r6r7sinθ4

将式(4)简化为得
Asinθ3+Bcosθ3+C=0
(5)

3.1.2 EFH调整部分
根据连杆IH和FH可得
(6)
将式(6)整理得
(7)
令 yH=p+qxH,其中
将上式代入式(6)得
(8)
其中
A2=1+q2
则
3.1.3 挖坑机构的运动学模型
引入比例因子λ,输出点为M(x,y),将有向线段IH分为两部分[6],得
3.2 速度与加速度分析
3.2.1 四连杆ABCD部分
r7+r6=r8+r9
将上式展开得
(9)
对式(9)求导得
对式(9)二次求导得
3.2.2 五变形BIHFE分析
r6+r4=r1+r2+r3
(10)
将式(10)整理得
r4=r1+r2+r3-r6

(11)
将式(11)展开得
A+Bcosθ4+Csinθ4=0
(12)
其中
B=2r1r3+2r2r3cosθ6-2r6r3cosθ3
C=2r2r3sinθ6-2r6r3sinθ3

θ4=2arctanx

4 香蕉种植开坑机仿真分析
通过三维建模软件Pro/E建立新型香蕉种植开坑机结构模型,L1=L4=300mm,L2=L3=500mm,L5=250mm,L6=300mm;将其导入动力学分析软件ADAMS中,建立新型香蕉动力学模型如图5所示[7-8]。

图5 新型香蕉种植开坑机动力学模型Fig.5 The new type of banana planting open pit motor mechanical model
当挖坑机构以垂直速度以Vy=0.05m/s运动时,通过动力学理论结合ADAMS软件得出电动机3和电动机1的速度特性如图6和图7所示。
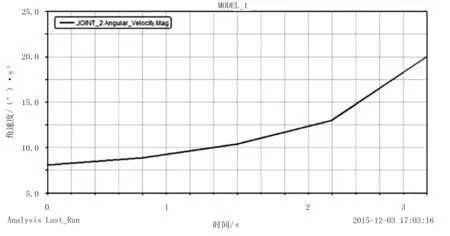
图6 电动机3速度特性Fig.6 The s peed characteristic of motor 3
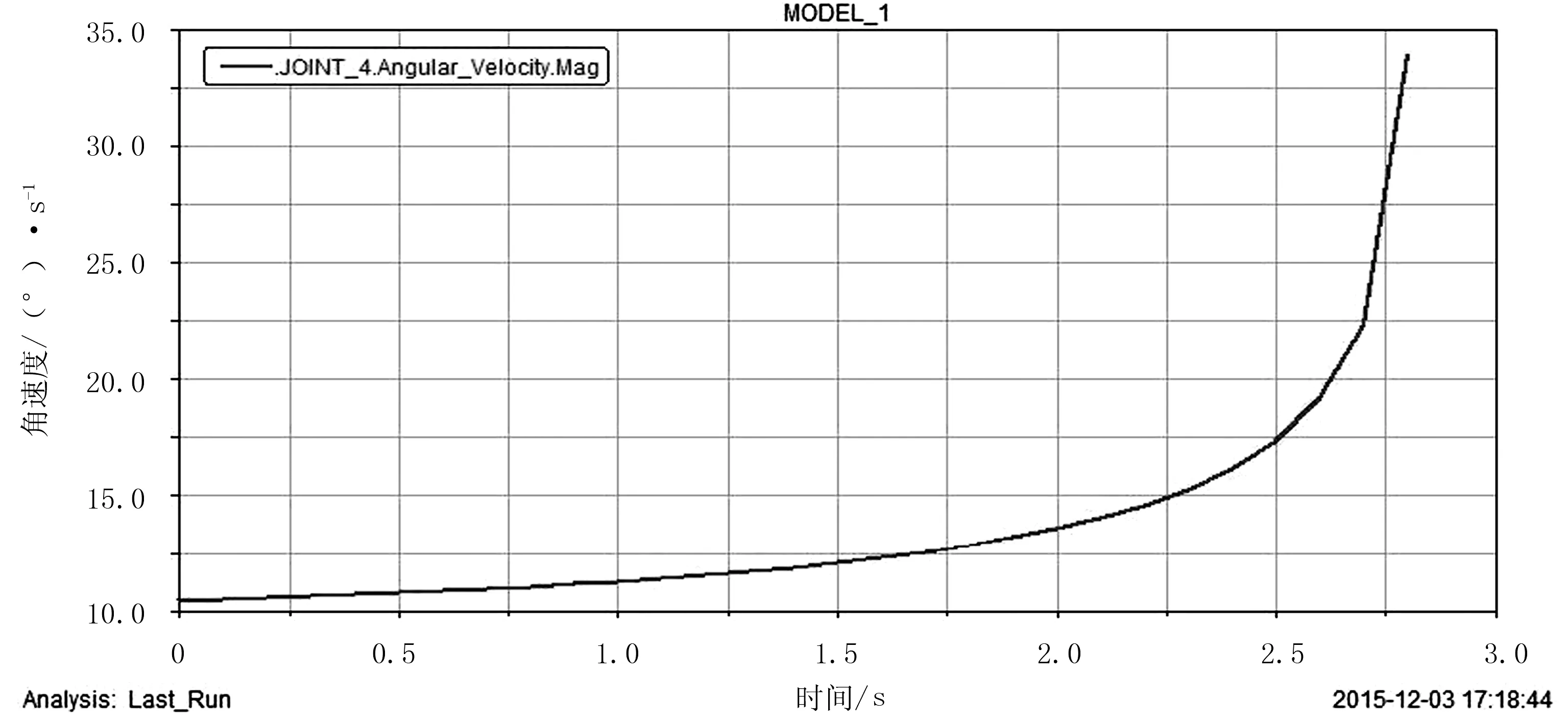
图7 电动机1速度特性Fig.7 The speed characteristic of motor 1
根据动力学理论结合动力学分析软件ADAMS,由图 6、图7可知:电动机1 和电动机3的速度特性,具有一定的可控性。
5 结论
1)针对新型香蕉种植开坑机的特点,基于螺旋理论对开坑机构进行了自由度分析,分析了开坑机构的运动特点。
2)运用矢量投影法,建立了挖坑机构各支链的运动学模型,并在此基础上对挖坑机构的运动特性进行了分析,获得挖坑机构关键运动参数。
3)在运动学分析基础上,基于ADAMS软件,对挖坑机构进行了虚拟仿真分析,得到了挖坑机构电动机运动参数,为新型挖坑机构的进一步研究及工程应用提供基础。
[1] 黄仁楚,刘伟.挖坑机工作参数的研究[J].东北林业大学学报,1989,13( 5) :18-22.
[2] 濮良贵,纪名刚.机械设计(8版)[M].北京:高等教育出版社,2005.
[3] 潘宇晨.多自由度可控机构式新型工程机械设计理论与方法研究[D].南宁:广西大学,2013.
[4] 黄真,赵永生,赵铁石.高等空间机构学[M].北京:高等教育出版社,1996.
[5] 刘善增,余跃庆,侣国宁,等.3自由度并联机器人的运动学与动力学分析[J].机械工程学报,2009,45(8):11-16.
[6] 潘宇晨,蔡敢为,张转,等.新型可控挖掘机构运动学建模与工作空间分析[J].广西大学学报: 自然科学版,2013,38(2):256-262.
[7] 陈文华,贺青川,张胆闻.ADAMS2007机构设计与分析范例[M].北京:机械工业出版社,2009.
[8] 郑凯,胡仁喜,陈鹿民,等.ADAMS2005机械设计高级应用实例[M].北京:机械工业出版社,2006.2.
The Structure Design and Simulation Analysis of New Type Banana Planting Open Pit Machine
Lou Yuyin1, Zhang Lin2
(1.Lushan College of Guangxi University of Science and Technology, Liuzhou 545000,China;2.Shandong Jiaotong University, Jinan 250357,China)
Based on the principle of reduce labor costs, improve labor efficiency, this paper developed a controllable connecting rod type 3-dof new banana planting open pit machine. First of all, through the formula based on screw theory based on the degrees of freedom, calculates the controllable banana planting open pit machine freedom, Secondly, banana planting open pit machine was established by applying the method of closed loop vector controlled the kinematics equation of earth auger, it is concluded that the kinematics characteristic;finally, combining with the multi-body dynamics theory combined with ADAMS software, simulation analysis was carried out on the controlled banana planting open pit machine, it is concluded that the engine movement characteristics. The results verify the rationality and feasibility of the new type of structure.
banana planting open pit machine; degrees of freedom; closed-loop vector; simulation
2016-02-03
国家级大学生创新创业训练项目(t3010098236)
娄玉印 (1983-),男,山东聊城人,助教,硕士,(E-mail)louguanghua@163.com。
张 林(1987-),男,山东临沂人,讲师,博士,(E-mail)louguanghua@163.com
S222.5+2
A
1003-188X(2017)03-0063-05
