玉米秧苗移栽机的设计
2017-12-16李晓月阳潮声袁付伟陈梦琪
李晓月,阳潮声,袁付伟,陈梦琪
(广西大学 机械工程学院,南宁 530000)
玉米秧苗移栽机的设计
李晓月,阳潮声,袁付伟,陈梦琪
(广西大学 机械工程学院,南宁 530000)
在总结现有机型优缺点的基础上,设计了一种新型玉米秧苗移栽机,能够一次性完成开沟、栽苗、覆土及镇压等工序。该机器由栽植机构、输送机构、开沟器、镇压轮、覆土机构、传动机构、悬挂部分及辅助部分等组成。为此,重点介绍了栽植机构、传动机构、输送机构以及机架及轮架的设计。栽植机构由曲柄摇杆机构演化而来,连杆作为栽植臂;传动机构采用齿轮及链轮传动;输送机构采用滚筒和皮带。实验证明:该机栽植效率在85%以上,性能稳定,栽植速度较高,减少了栽植手的疲劳强度,给农民带来较大的方便。
移栽机;玉米秧苗;传动机构;栽植机构;输送机构
0 引言
玉米的种植方式分为两种,即播种和移栽。在我国北方的高寒地区,东北三省实行玉米移栽的方式,而其他地区多采用播种的方式。玉米移栽是提高玉米产量和质量的重要措施,但目前移栽的机械化程度不高,多以半自动的为主,需要人工送苗、喂苗[1]。
目前,我国主要的移栽机包括钳夹式、水轮式、吊杯式、吊篮式、挠性圆盘式及导管苗式等[2],如2YZ系列玉米秧苗移栽机、2BZ系列玉米秧苗移栽机[3],这些机构移栽效率低、自动化程度不高、互换性差、适应能力低。因此,在现有机型的基础上设计了一种新型的玉米秧苗移栽机,设计和改进栽植机构,提高了栽植速度,减少了栽植手的疲劳强度。该机构借鉴插秧的工作原理,采用曲柄摇杆栽植机构,可在曲柄运动1个周期内完成取苗和栽苗的过程,提高了玉米移栽的效率[4]。
1 结构及工作原理
玉米秧苗移栽机主要由动力传动部分、栽植机构、输送机构、开沟器及镇压轮等部分组成,如图1所示。传动部分靠行走轮的转动把动力通过行走轮传动链传递给水平传动轴;经过水平横向的传动后,动力从水平传动轴分成两部分,一部分靠链条传给栽植机构成为栽植机构的动力来源;另一部分通过链条、锥齿轮传递给水平输送皮带。此外,整个机器用U型螺栓固定于悬挂架上,单体之间靠横轴接联轴器把动力传递过去,悬挂架设有悬挂机构,连接在农用拖拉机上。
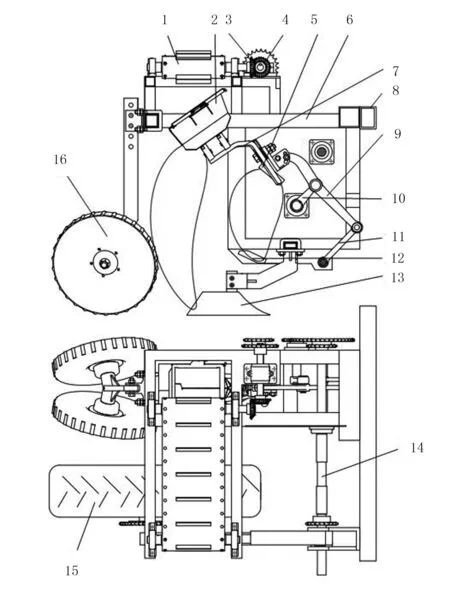
1.输送带 2.接苗斗 3.从动锥齿轮 4.主动锥齿轮 5上凸轮挡块 6.机架 7.秧夹 8.悬挂架 9.栽植臂 10.曲柄 11.摇杆 12.下凸轮挡块 13.开沟器 14.水平传动轴
工作时,由输送带、接苗斗、栽植机构的相互配合实现整个栽植过程,首先玉米秧苗靠输送带的运输,掉落在常闭的接苗斗内,等待秧夹运动经过接苗斗接住秧苗并夹紧,在栽植臂的带动下往复运动。秧夹的打开和关闭靠上下安装的上凸轮挡块和下凸轮挡块实现,在接苗时打开然后夹住接苗斗里的秧苗。接苗斗是一个具有一定斜度安装弹簧的对开的常闭容器,打开靠的是秧夹的作用力。当秧夹运动到底部时,凸轮挡块推动秧夹杆,使左右秧夹杆脱离弹簧的束缚,秧夹打开,使秧苗落到开沟器开好的沟里;接着开沟器的土壤回落到秧苗的根部,由后面的镇压轮压实,实现整个移栽过程。
2 关键部件的设计
2.1 动力传动部分
根据机具的大体布局,确定传动布局,机具采用行走轮作为传动的动力来源,主要是因为行走轮传动能满足机具的动力需求,同时行走轮可以设计成螺旋调节机构,通过调节机具的高度以满足不同的地形和农艺要求。传动装置结构如图2所示。
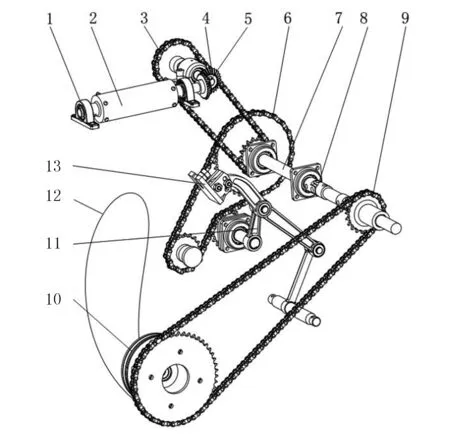
1.轴承座 2.滚筒 3.链条 4主动锥齿轮 5.从动锥齿轮 6.链条 7.水平传动轴 8.联轴器 9.链条 10.行走轮安装盘
11.曲柄 12.运动曲线 13.秧夹安装座
图2 传动装置结构图
工作时,通过行走轮传动链将动力传送至水平传动轴上,水平传动轴经过水平横向输送之后到达机具另一侧。水平传动轴上安装1个大链轮和1个小链轮,动力在此处一分为二:一方面,大链轮通过链条和惰性链轮、曲柄链轮把动力传递给栽植臂的曲柄,从而带动栽植机构工作,此处采用惰性链轮是因为栽植臂的转向和行走轮的旋转方向相反。另一方面,水平传动轴上的小链轮通过链条传给短轴,然后靠一对传动比为1的锥齿轮换向传给输送滚筒,作为输送机构的动力。正常工作时,栽植机构和输送机构配合工作,两者之间满足一定的传动关系。
2.2 栽植机构的设计
栽植机构选用曲柄摇杆式,该机构的运动轨迹如图3所示。该轨迹满足了垂直栽植的要求,也可以模拟手工栽植的上下运动。当秧苗到达底部时,栽植手停留时间较短,不影响后续的工序,减少了土壤对秧夹头部的作用。四杆的连接长度分别为a=80mm,b=180mm,c=140mm,d=170mm。其中,a为曲柄,也是主动杆;c为摇杆;b是固定杆;d作为连杆同时也是栽植臂。各杆件靠销轴连接,摇杆通过键和动力轴连接。
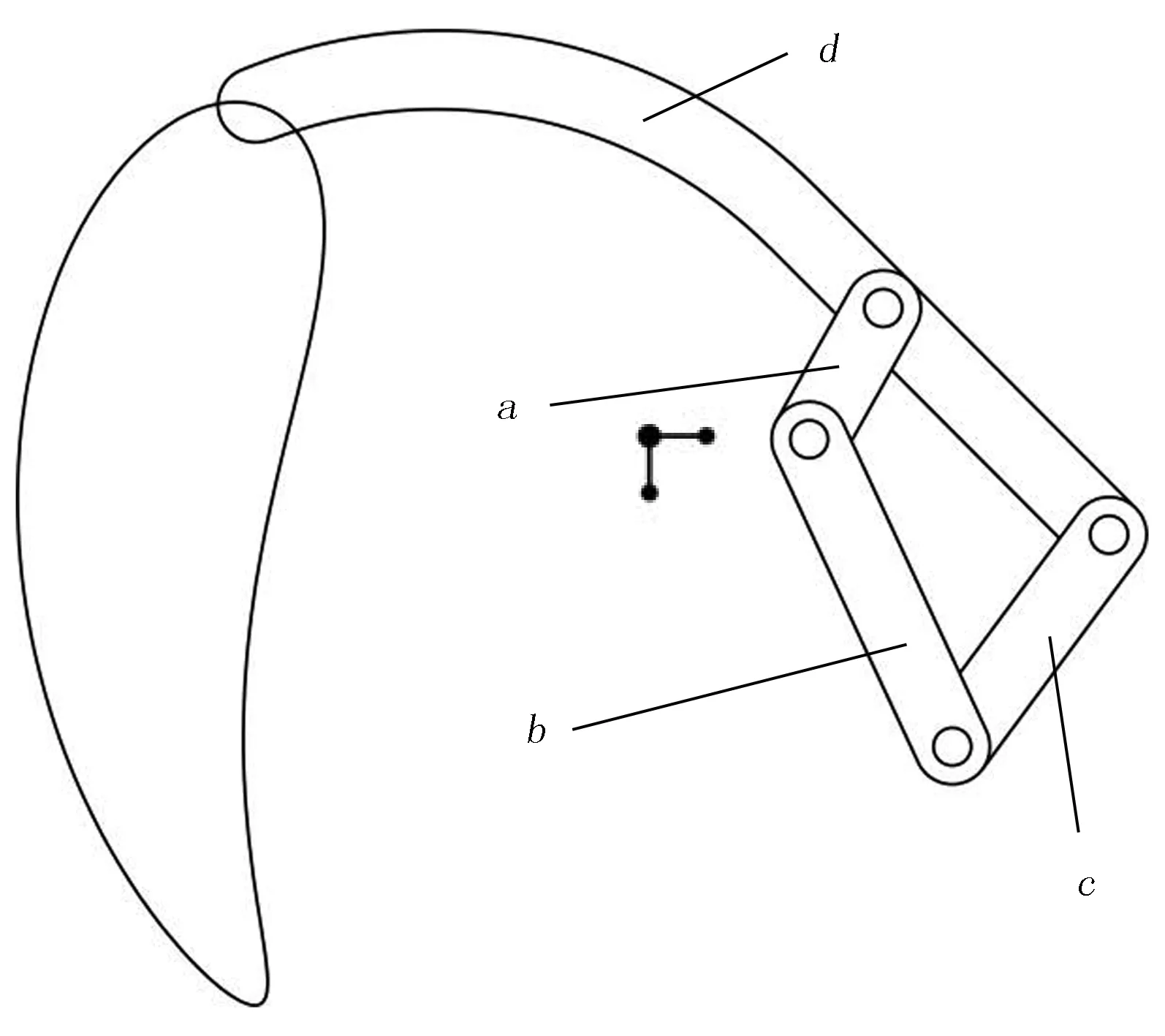
图3 栽植机构运动轨迹示意图
该机构在连杆的端部装上秧夹,且秧夹靠套筒和螺栓连接,使得秧夹可以自由转动。栽植机构结构如图4所示。秧夹的开关通过挡板和复位弹簧控制,机构向上运动到一定的位置时,打开秧夹,接住秧苗,然后向下运动到一定的栽植位置时靠凸轮挡块的推动作用打开秧夹,使秧苗落下[5],如此循环工作。
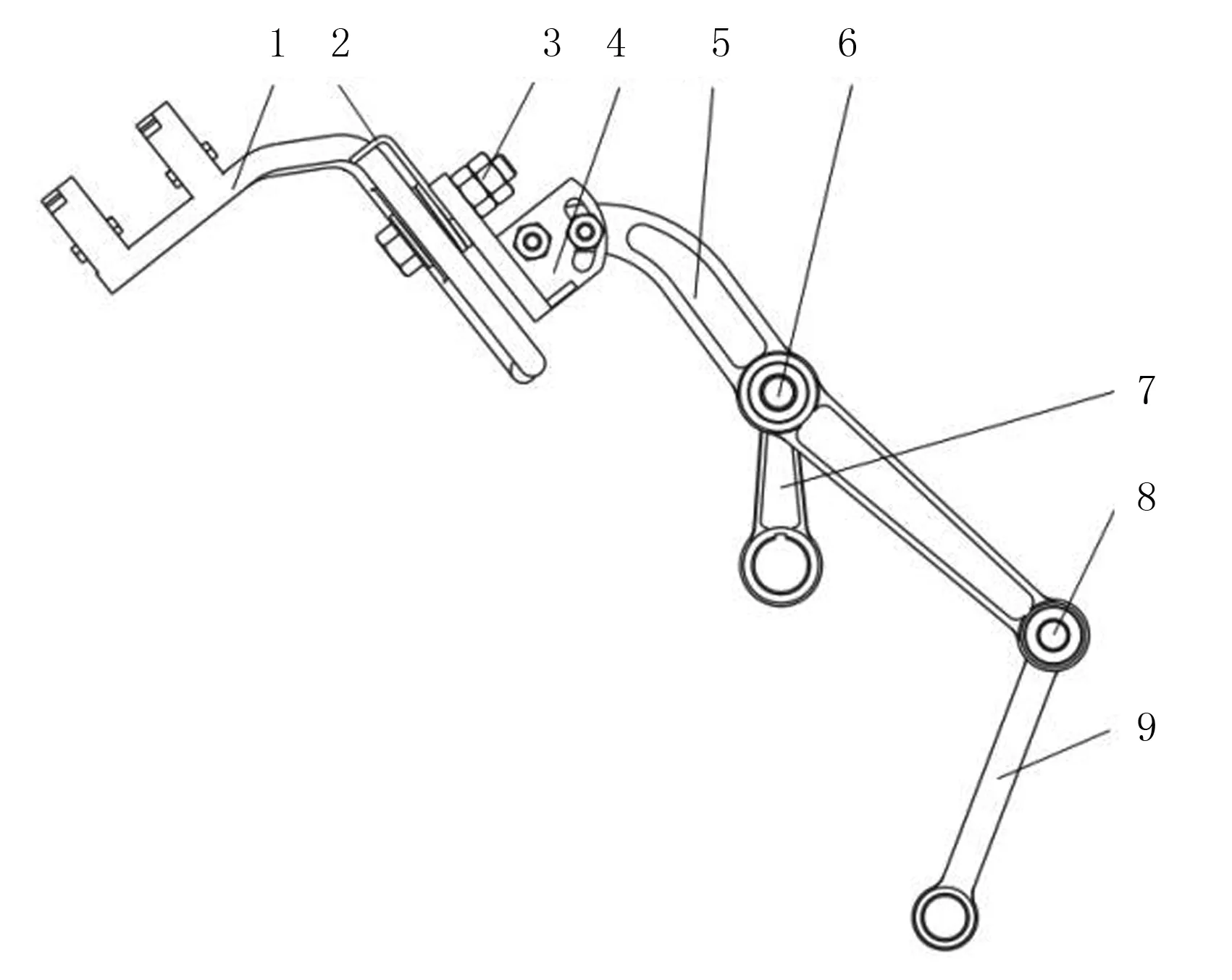
1.秧夹 2.复位弹簧 3.固定螺栓 4.安装架 5.栽植臂
秧夹是一个对称的结构,有左右秧夹杆、夹板和复位弹簧组成,作用是夹住秧苗,跟随栽植臂一起运动。秧夹设计成常闭形式,复位弹簧控制秧夹的关闭,凸轮挡块控制秧夹的打开。
2.3 输送机构的设计
采用了一横向的输送橡胶带来输送秧苗,这样在人工上苗时能有多个上苗点,减小栽植手的疲劳强度。输送带和栽植机构通过内联系传动链协调工作。
输送带主要由3部分组成,即皮带、两个滚筒和锥齿轮,如图5所示。
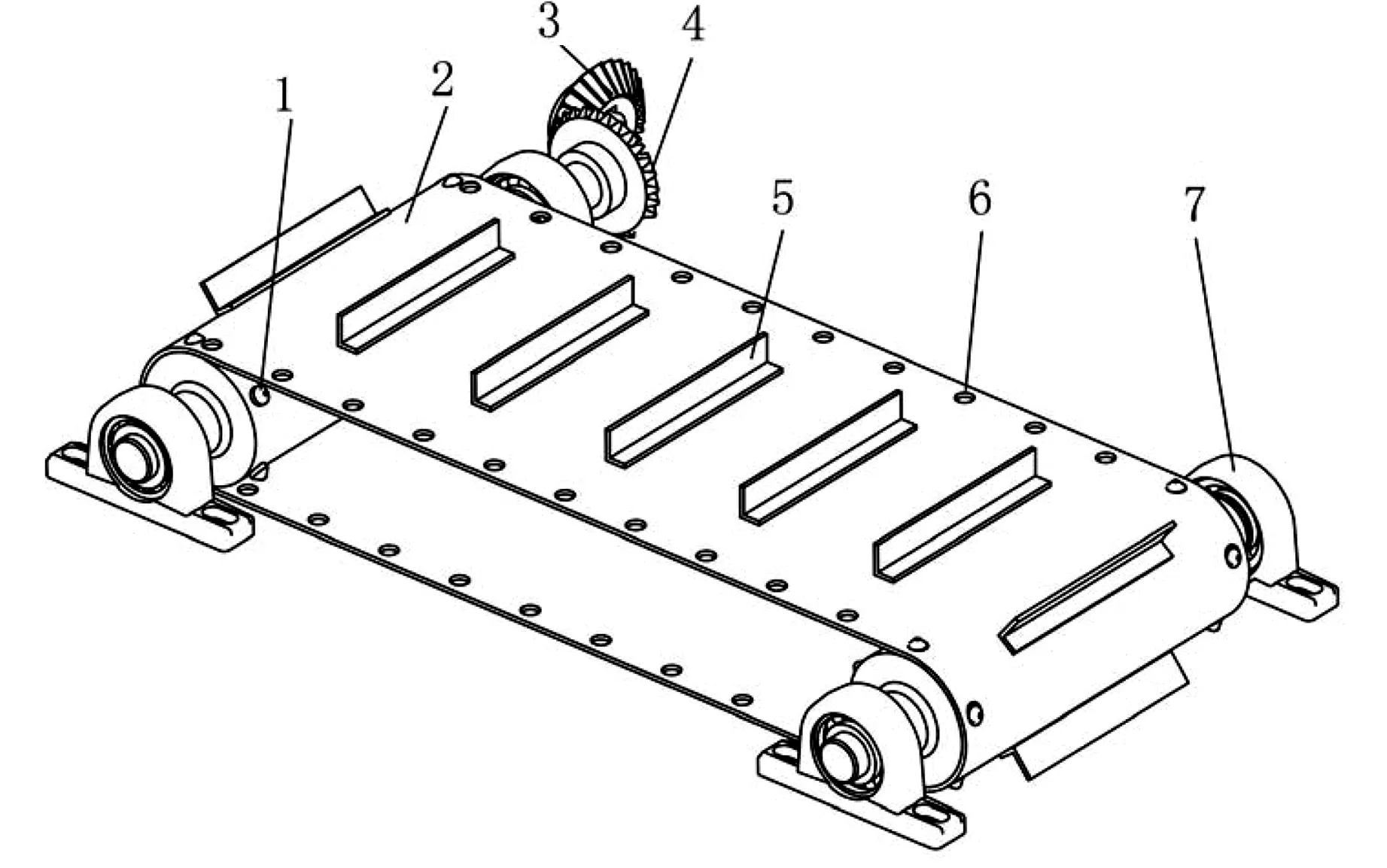
1.滚筒 2.皮带 3,4.啮合的锥齿轮 5.挡板 6.侧孔 7.轴承座
滚筒由直径为60mm空心圆钢焊接而成,在滚筒两端的筒臂上分别焊接了5个均匀分布的凸台,凸台和输送带上的孔配合,带动皮带运动,也防止皮带打滑。皮带采用的是输送橡胶软皮带。适宜栽植的玉米高度约为10~15cm,因此设计皮带宽度为180mm[6]。间隔挡板均匀地固定在皮带上,间隔挡板的数量为14块;此外,皮带上每侧都打有侧孔,每侧打25个侧孔。
2.4 接苗斗的设计
接苗斗结构如图6所示。
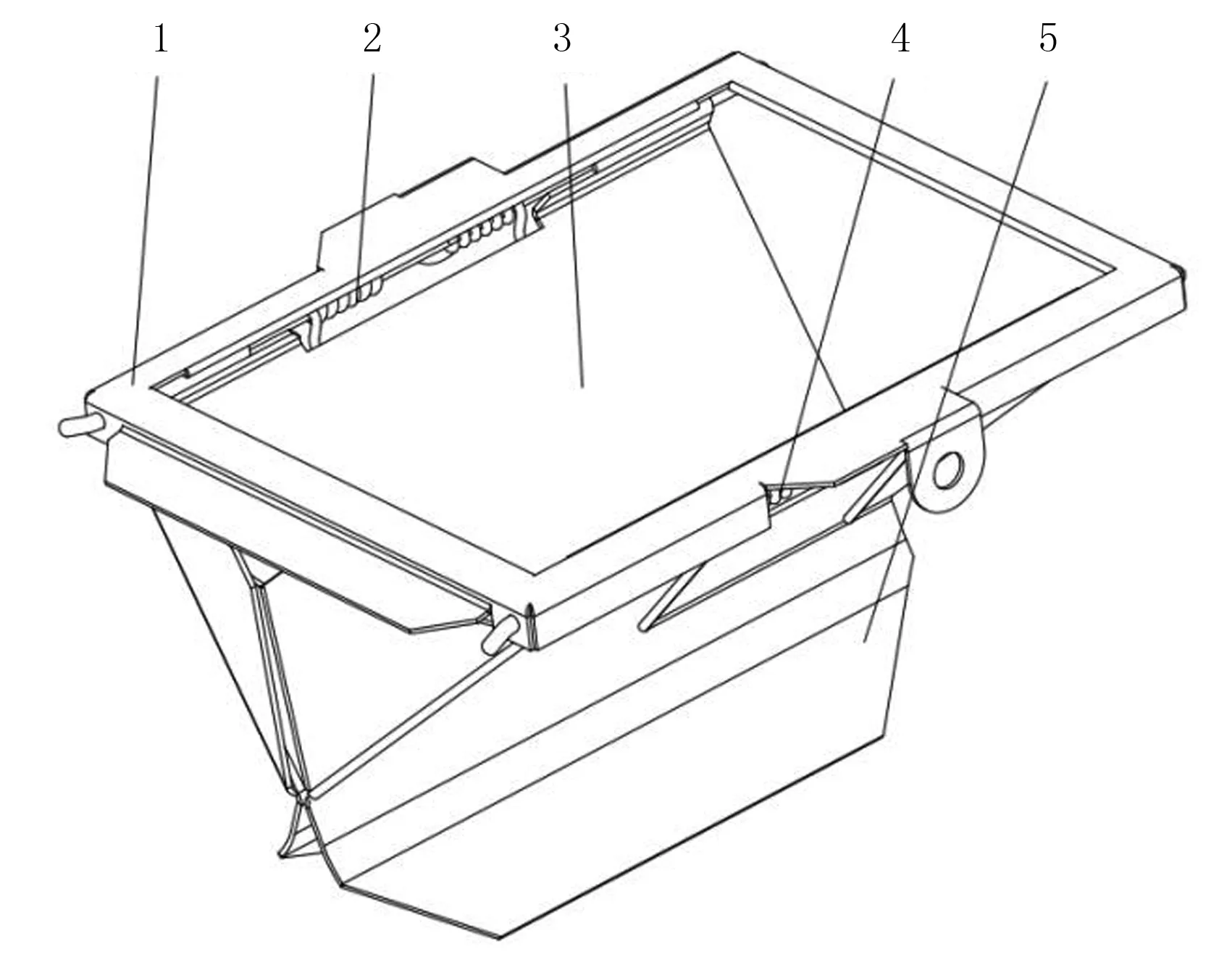
1.安装架 2.复位弹簧 3.左挡片 4复位弹簧 5.右挡片
秧苗是经人工运送到输送带的,经过一小段距离的运输,掉落到接苗斗里,等待秧夹的夹取。接苗斗是一个漏斗状的盛苗盘,由对称的两薄板组成,在薄板的转轴上安装弹簧;接苗斗的下方呈倒V形,主要是为了让秧夹能顺利地打开接苗斗。工作时,秧夹向上运动打开秧夹,秧夹传递作用力给接苗斗,接苗斗打开,秧苗掉下,夹住秧苗,然后在弹簧的作用下接苗斗再次闭合[7]。
整个接苗斗安装在安装架上,如图7所示。接苗斗主要由厚度为1.2mm的钣金制成,轻便灵活,且工艺性好。
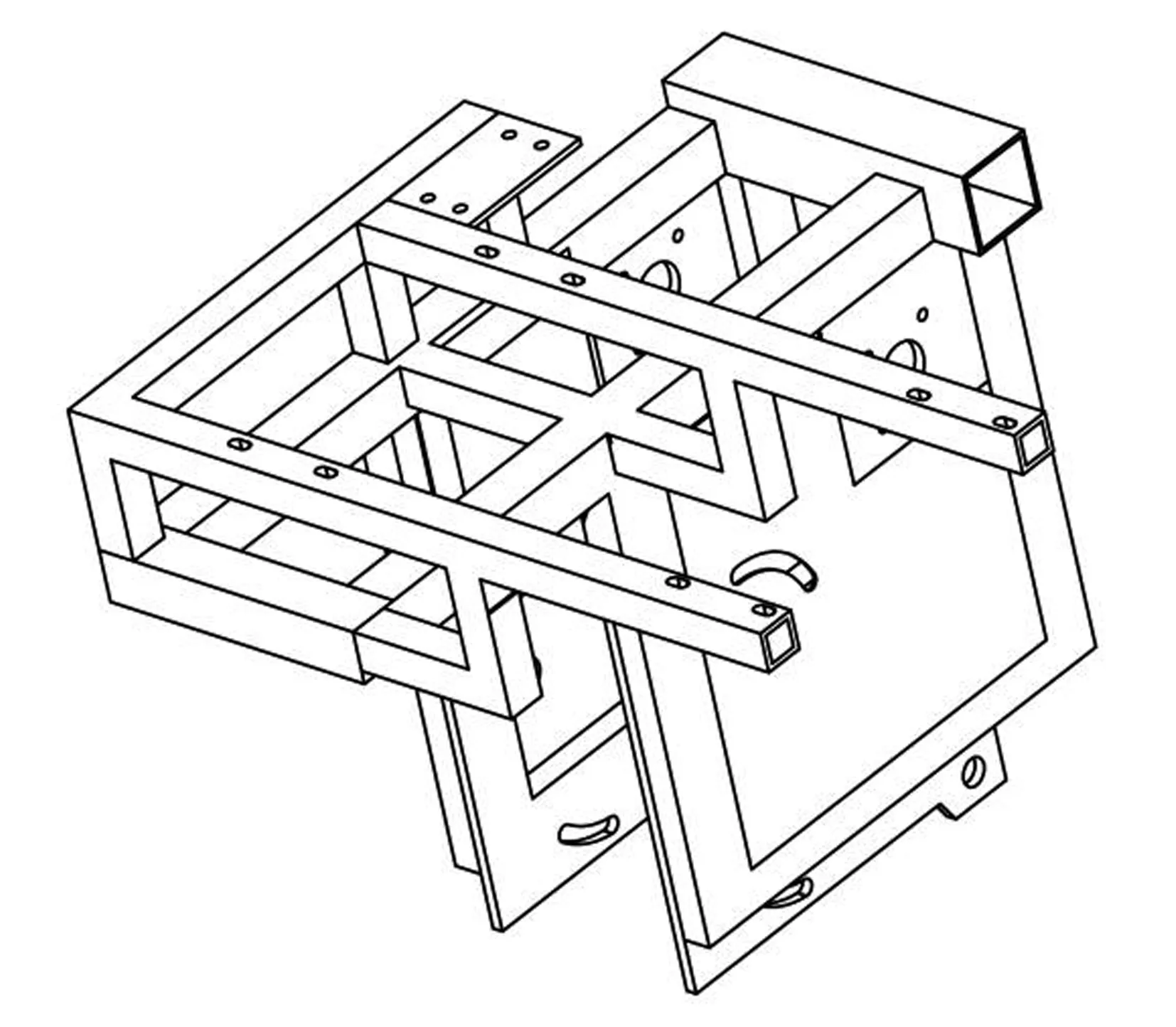
图7 机架结构图
2.5 机架的设计
机架整体框架是由30mm×30mm×3mm、60mm×60mm×5mm、50mm×3mm×5mm等方钢管和矩形钢管焊接而成,机架上安装轴的地方使用的是6mm厚的钢板,其他地方为了减轻质量采用的是2mm厚的薄板。
2.6 轮架的设计
轮架用于固定行走轮。为适应不同的农艺要求和地形,行走轮的高度必须设置为可调式的,参照已有结构再结合该机具的尺寸和结构需求,设计了如图8所示的轮架,调节时可通过旋转上边的螺旋杆调整轴调整。轮架的旋转轴和整个轮架用U型螺栓固定在拖架上。
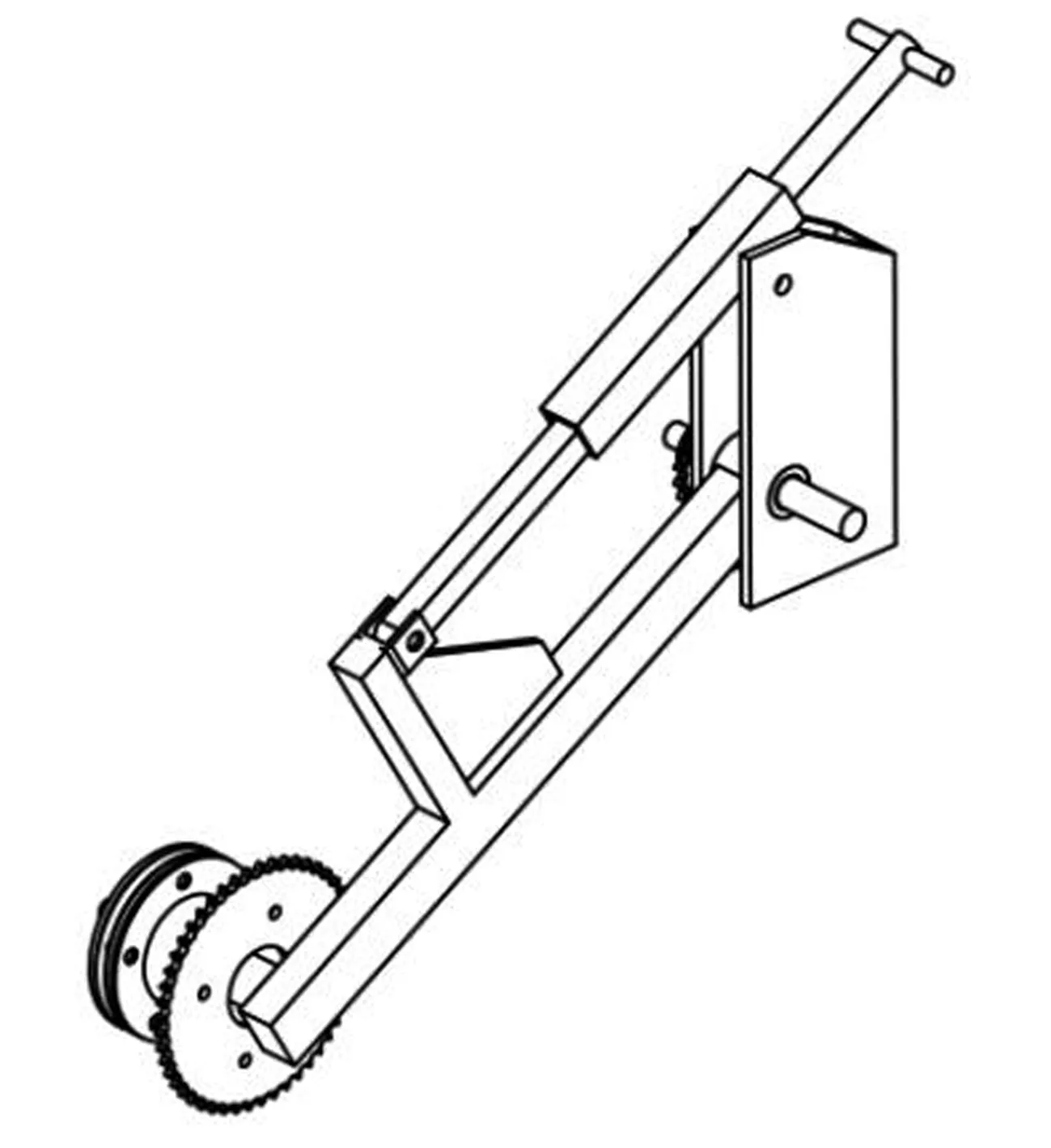
图8 轮架结构图
3 性能试验结果
通过计算得行走轮的最大转速为12.31r/min,最大栽植速度为84株/min。栽植要求:移栽机可以在不同硬度的土壤中工作,株距合格率在85%以上。选择的土壤分别为新耕地、麦茬地、稻茬地、泥地[8];每种土壤栽植5行秧苗,每次试验选取100株长势均匀的秧苗。秧苗的尺寸参数如表1所示,机器的性能试验结果如表2 所示。
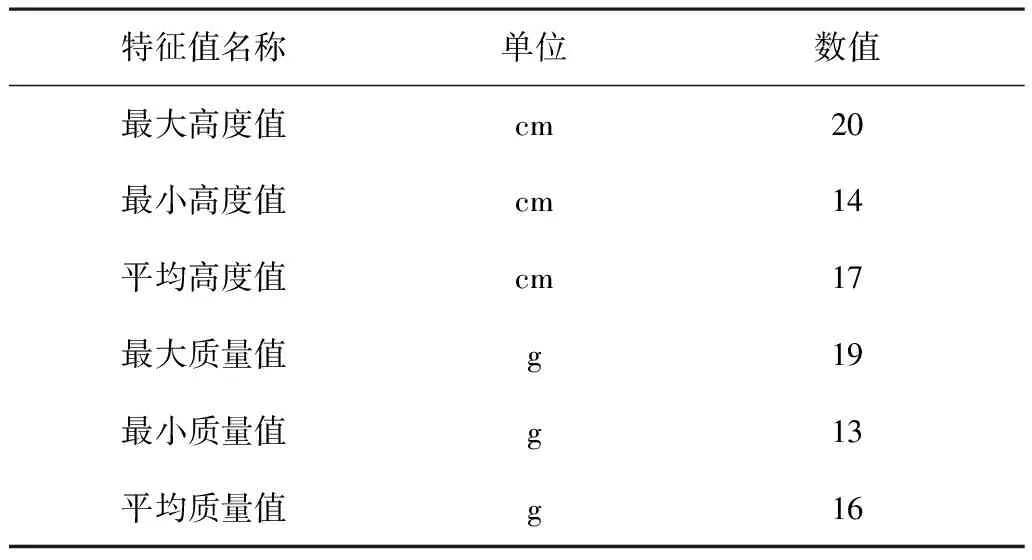
表1 玉米秧苗尺寸参数表
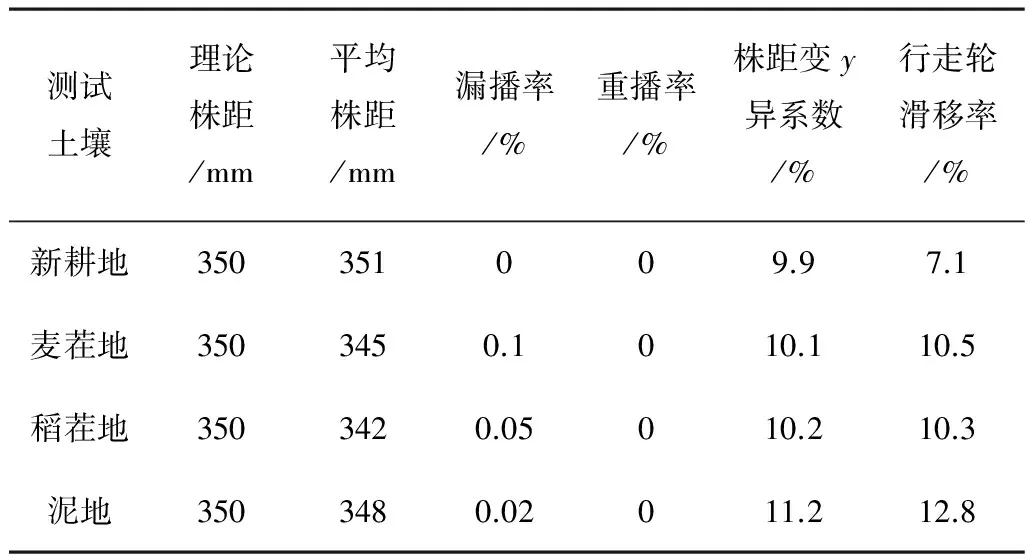
表2 玉米移栽机性能试验结果
由试验结果可知:秧苗在新耕地里栽植深度一致性比较好,株距也较合理,秧苗重播率、漏播率都较小;在泥地里栽植深度一致性较差,株距合格率较低,行走轮最容易发生滑移。
4 结论
该玉米秧苗移栽机性能稳定,栽植均匀性比较好,适应性比较强,株距、行距满足玉米移栽农艺要求,突破了以往自动移栽的技术瓶颈,为以后的研究提供了参考依据[9]。但是,该机器还存在一些问题,如栽植机构不够灵活,调节不方便;输送机构不够紧凑;传动部分也过于复杂;镇压轮和开沟器的可调性差。另外,也需要进一步增加玉米秧苗移栽机的附加功能,如铺膜、起垄、补水、施肥等功能,既可提高机具的工作效率,也可节省过多的劳动力输入,对大面积推广玉米移栽有着很重要的意义[10]。
[1] 宋小雨,张晋国,王学良,等.玉米移栽机自动送苗装置的研究[J].农机化研究,2013,35(2):85-88.
[2] 史志清.玉米自动移栽机关键部件的研究[D].北京:中国农业大学,1998.
[3] 金攀,刘强.栽植机械的主要类型及性能特点[J].现代化农业,2012(3):67.
[4] 付晓明,张伟,牛钊军.栽植机构的运动学建模与参数优化[J].农机化研究,2013,35(10):11-14.
[5] 肖明涛,孙松林,罗海峰.双平行多杆栽植机构运动学分析与试验[J].农业工程学报,2014,30(17):25-30.
[6] 胡波,侯林山.玉米秧苗移栽机械化综合研究[J].中国农机化,1997(3):41-42.
[7] 刘敏,张明,绪言,等.2ZBZ-2A型移栽机栽植机构运动学分析与试验[J].农机化研究,2015,35(11):31-36.
[8] 宋小雨.带有自动送苗机构的玉米秧苗移栽机的研制[D].保定:河北农业大学,2013.
[9] 牛钊军,张伟,付晓明.全自动玉米钵育移栽机移栽机发展趋势的研究[J].农机化研究,2014,36(7):242-243.
[10] 徐丽明,张铁中,史志清.玉米自动移栽机取苗机构的设计[J].中国农业大学学报,2000(4):58-60.
Design of Corn Seedling Transplanter
Li Xiaoyue, Yang Chaosheng, Yuan Fuwei, Chen Mengqi
(Institute of Mechanical Engineering, Guangxi University, Nanning 530000,China)
Based on the advantages and disadvantages of the existing models, a new kind of corn seedling transplanter is designed. It can ditch,plant seedling,cover the soil,suppress the soil. It are made of planting seedling mechanism,conveying mechanism,furrow opener,press wheel,overbite soil mechanism,transmission mechanism,suspension part,supplementary part and so on. Planting seedling mechanism,transmission mechanism,conveying mechanism,frame and wheel carrier are introduced in detail. Plant seedling mechanism is evolved from crank and rocker mechanism, connecting rod is regarded as planting arm;gear transmission and chain transmission are applied into the transmission mechanism; drum and belt are applied into the conveying mechanism.The practical production proves that the efficiency of the machine is 85%,planting speed is high. It reduces the fatigue strength of planting hand and it is convenient for farmer.
transplanting; corn seedling;transmission mechanism;planting seedling mechanism;conveying mechanism
2016-05-22
广西教育科学“十二五”规划项目(2015C343)
李晓月(1993-),女,济南人,硕士研究生,(E-mail)15578804947@163.com。
S223.92
A
1003-188X(2017)07-0117-04
