基于物联网农业病虫害智能监控的自动喷药机研究
2017-12-16房亚群谷利芬
房亚群,谷利芬,张 莉
(1.江苏食品药品职业技术学院 信息工程系,江苏 淮安 223003;2.焦作师范高等专科学校 计算机与信息工程学院,河南 焦作 454000;3.武汉晴川学院,武汉 430064)
基于物联网农业病虫害智能监控的自动喷药机研究
房亚群1,谷利芬2,张 莉3
(1.江苏食品药品职业技术学院 信息工程系,江苏 淮安 223003;2.焦作师范高等专科学校 计算机与信息工程学院,河南 焦作 454000;3.武汉晴川学院,武汉 430064)
为了实现果园大面积自动化喷药,提高喷药装置智能化选择重点病虫害果树目标的能力,基于物联网和智能监控技术,设计了一种新的果园自动对靶喷药装置。利用新式的自动喷药装置,可以结合病虫害实时监控数据,对果树有选择性地进行自动喷药,利用红外线扫描技术可以精确地喷药对靶,采用AT89S52单片机实现了整个系统的自动化控制。模拟实际果树喷药环境,在实验室对喷药装置的自动对靶功能进行了实验研究,实验过程中分别采用了3种不同颜色的标的物。实验结果表明:在实验10m的范围内,智能喷药装置可以准确地识别3种颜色的盆栽目标,标准差最大仅为0.12,识别精度和效率较高,为果园自动喷药装置的研发提供了技术支持。
喷药装置;物联网技术;自动对靶;实时监控
0 引言
设施农业具备物联网推广应用规模化、集约化生产经营这一基础条件,因此是农业物联网重点应用领域。近年来,物联网在农业实施控制和自动化生产作用中应用的范围越来越广泛,如病虫害的检测和诊断、数据的分布式采集及环境的实时检测等。其可以对土壤温度、湿度、和光照需求等因子进行智能分析,采用远程监控和信息发布等方式,提高农业装备的智能化和自动化水平,从而实现农业的精细化发展。目前,国内自动化喷药装置的研究还不多,采用物联网和实时监控病虫害研究喷药装置的更为罕见,而将该技术引入到果园喷药装置的设计和研究中,可以带来巨大的技术变革,对于喷药自动化和精准化实施、提高喷药过程中人员的安全性、降低环境的污染程度、提高喷药效率等具有重要的意义。
1 喷药设施设计
为了实现果蔬喷药的规模化作业,必须借助于自动喷药装置。背负式的喷药机已经不能完成大田的作业,其对人员伤害较大,农药的使用效率较低,而采用悬挂式喷药机可以有效地改变这种状况。悬挂式喷药机作业过程如图1所示。

图1 悬挂式喷药机作业过程
该装置使用拖拉机进行了改装,从而使喷药面积有所增大,有效地提高了喷药效果;但是该装置只适应于大地块作业,适应能力弱,自动化程度低,不适用于果树喷药作业。
图2为华盛中天研制出的一款多悬翼无人喷药机。该喷药机的作业适用范围较广,可对各种作物进行大面积喷药,并配备了GPS系统,增强了系统飞行的稳定性。这种喷药机操控性好,自动化程度较高,对农药的利用率也较高,减少了劳动力,且对作物的穿透性较好。基于这种装置的理念,设计了一种基于物联网和实时监控的自动喷药装置,总体框架如图3所示。
物联网在自动喷药装置设计中的作用主要是对果园环境进行检测,实现实时监控。其中,环境参数主要包括光照、温度和湿度等,而视频监控主要是对果树的病虫害状况进行实时监测。当视频监控发现某个区域果树的病虫害情况严重、需要对该区域进行喷药时,利用GPRS网络通信将位置发送给单片机,单片机确认位置后通过红外线扫描对果树进行准确定位,其流程如图4所示。

图2 多旋翼无人喷药机
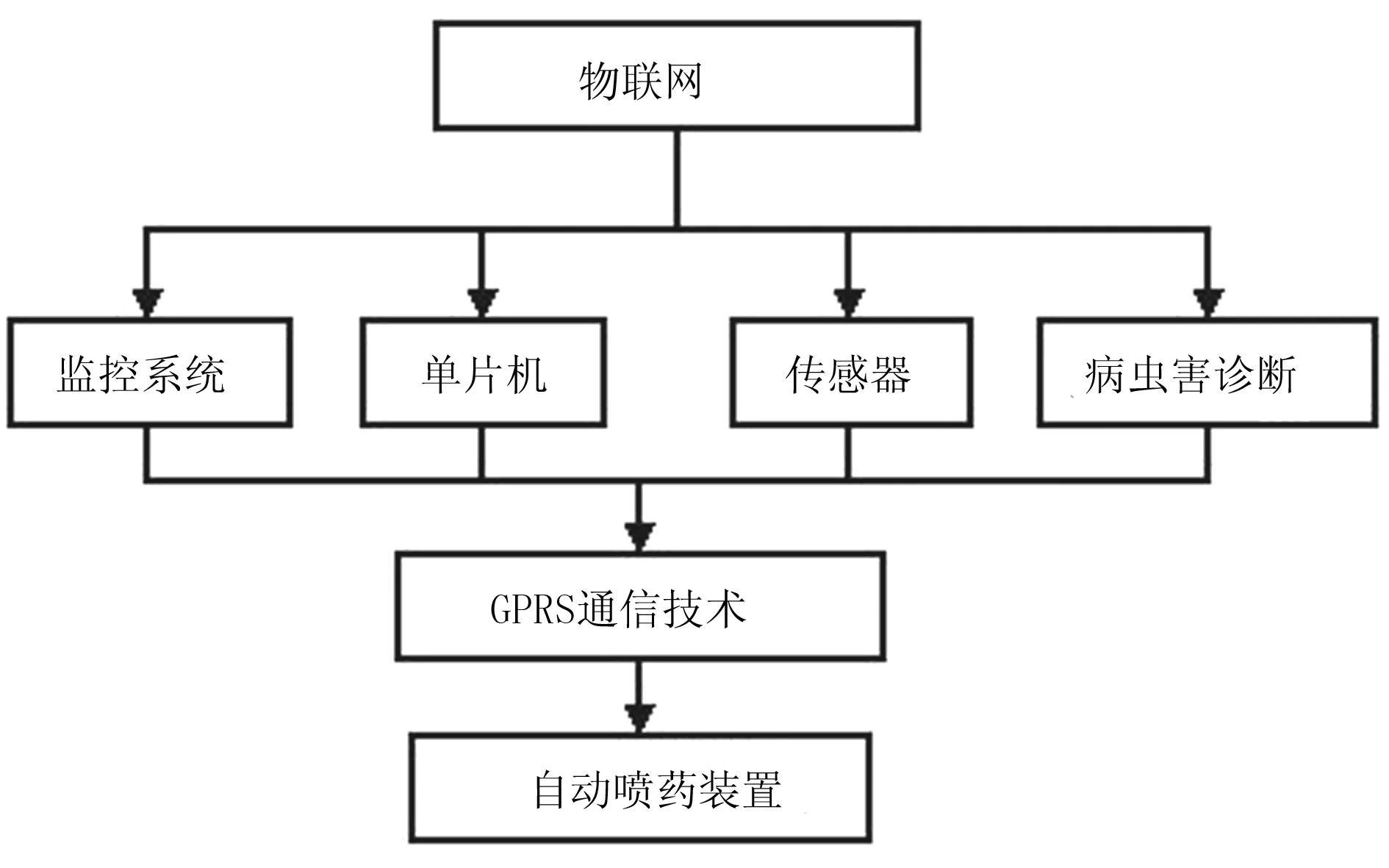
图3 基于物联网的自动喷药装置

图4 自动喷药机工作流程
工作时,首先通过物联网实时监控测得病虫害区域,利用单片机对数据进行处理,得到病虫害较为严重的果树目标区域;如果识别出目标,则喷药机进行移动,到达指定地点后,由电磁阀控制对目标区域进行喷药,喷药量的大小可以通过电磁阀进行控制,从而实现了喷药过程的全自动化控制。
2 智能控制网络和硬件设计
为了实现喷药系统的自动化和智能化控制,需要设计喷药装置的核心控制器,其主要功能是通过与物联网进行连接,得到病虫害较为密集的区域,然后采用红外线技术对目标区域进行定位。本设计采用自走式喷药设备,主要喷药对象为果树。信号在核心控制器AT89S52中进行处理之后,将控制信号发送到喷药器的执行末端,控制电磁阀的开合和流量,对病虫害集中区域进行重点施药。其通信网络的总体设计如图5所示。
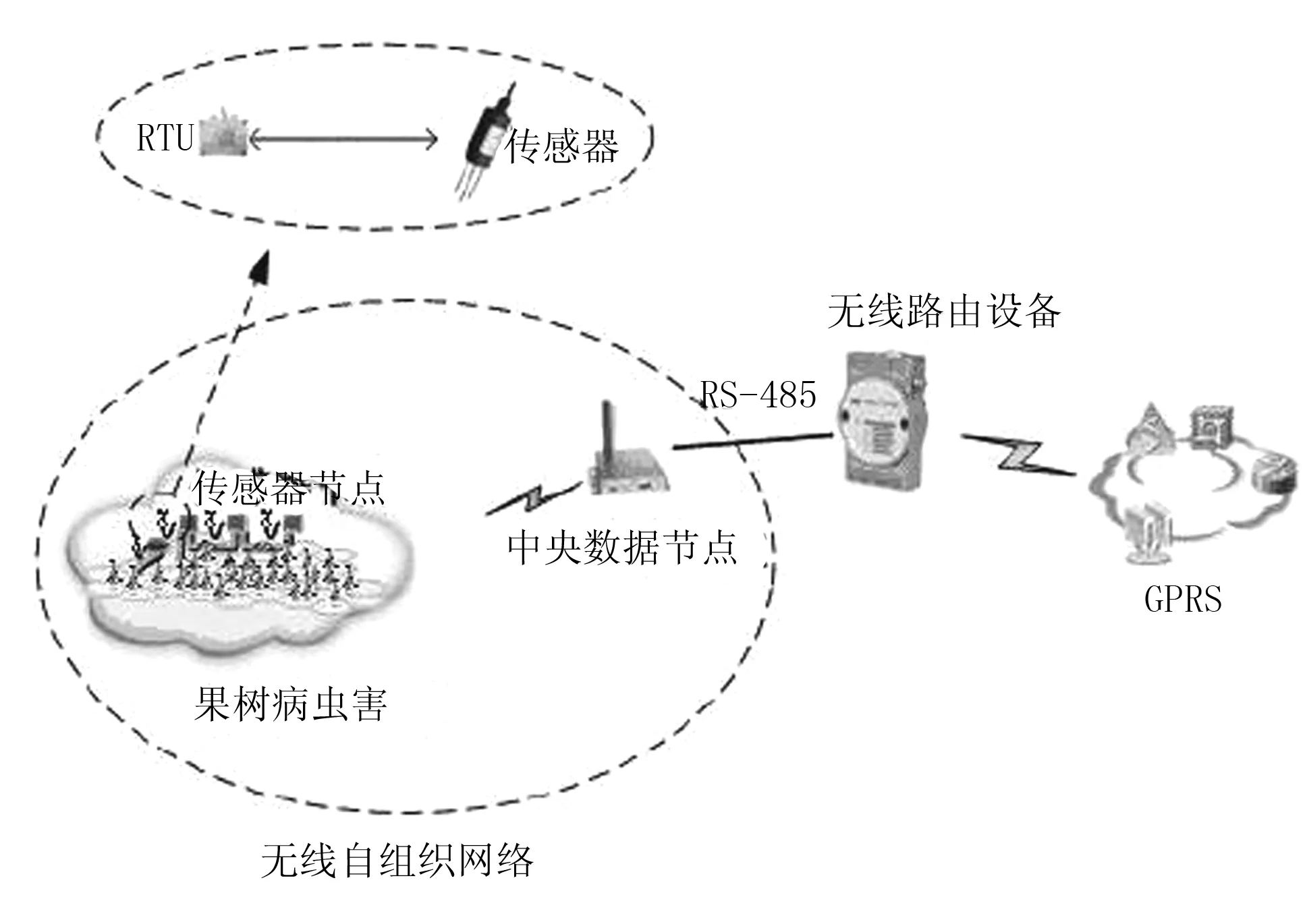
图5 智能喷药系统物联网无线通信框架
图5中,底层采用传感器设备对果树的病虫害状况进行采集,然后将数据通过节点路由设备、利用RS-485通信协议传送到远程上位机,上位机与路由设备的通信使用GPRS。系统的硬件部分8个模块,主要包括通信系统模块、红外线扫描模块、时钟电路、供电模块、设备复位模块、接口测试模块、步进电机控制模块、电磁阀模块和供电电源模块,总体框架如图6所示。
红外线扫描设备主要对距离进行扫描,通过可变距离开关,可以将额定测试距离从0cm调整到1 000cm,为智能自动化喷药机提供了果树目标识别的参数。
图7为利用红外线扫描装置。对重点病虫害果树进行扫描识别目标的原理:当自动喷药装置接收到网络通信病虫害严重的果树时,利用红外线装置对果树进行自动定位和识别。红外线扫描设备使用红外线发射和接收装置来测定果树的距离,信号利用调制解调进行放大,利用单片机实现自动控制功能。其中,自动控制过程的时钟电路如图8所示。单片机在进行自动化控制时需要时钟信号,因为在执行自动化控制时,控制系统需要严格地按照时序顺序执行。本研究采用的单片机使用内部产生时钟的方式,并利用XTAL1和XTAL2跨接晶振,C1和C2利用30PF电容进行微调,单片机和时钟电路的位置最近,从而避免了在数据采集和处理过程中外部环境的干扰,保证了系统的稳定性。
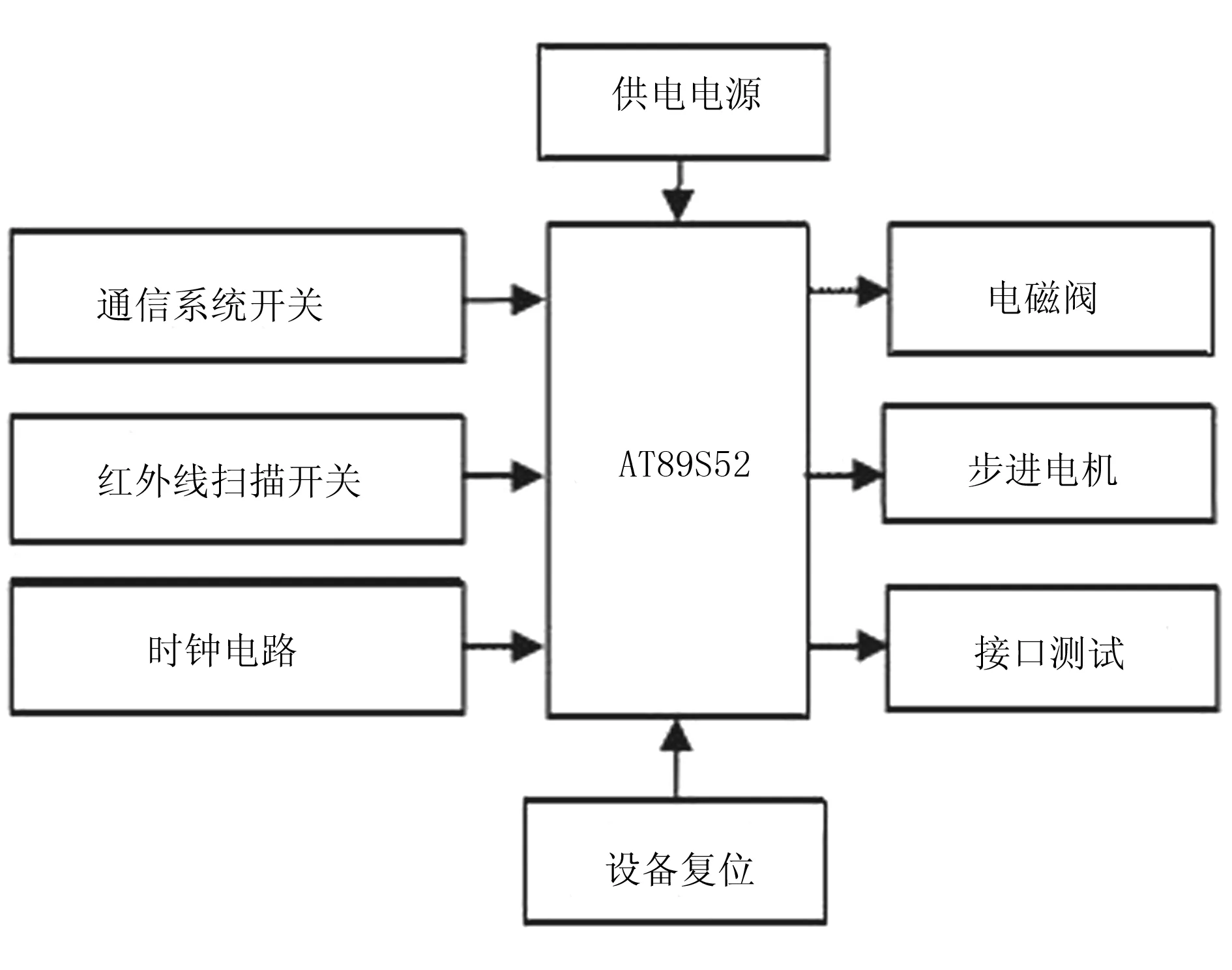
图6 智能喷药系统硬件模块
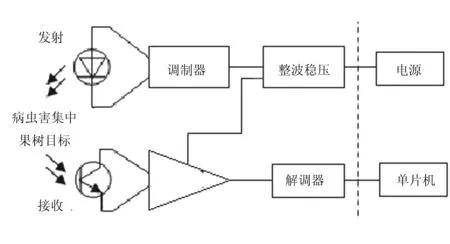
图7 红外线扫描果树识别原理
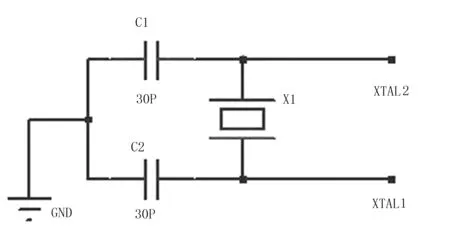
图8 控制系统单片机时钟电路图
自动化喷药装置完成喷药目标作业后,需要恢复到工作的初始状态,并从这个初始状态开始工作。单片机在进行一次作业后,需要对按键、监控程序及自动控制系统进行复位,通过电容、电阻和复位按钮实现复位功能。控制系统的复位电路图如图9所示。系统开始工作后,电路中开始有电,VCC电压从0变成特定数值,并且在RESET端具有24个震荡周期的高电平;将该点接地,RESET端的电平由高变低,从1变为0,从而实现了喷药装置单片机的复位。
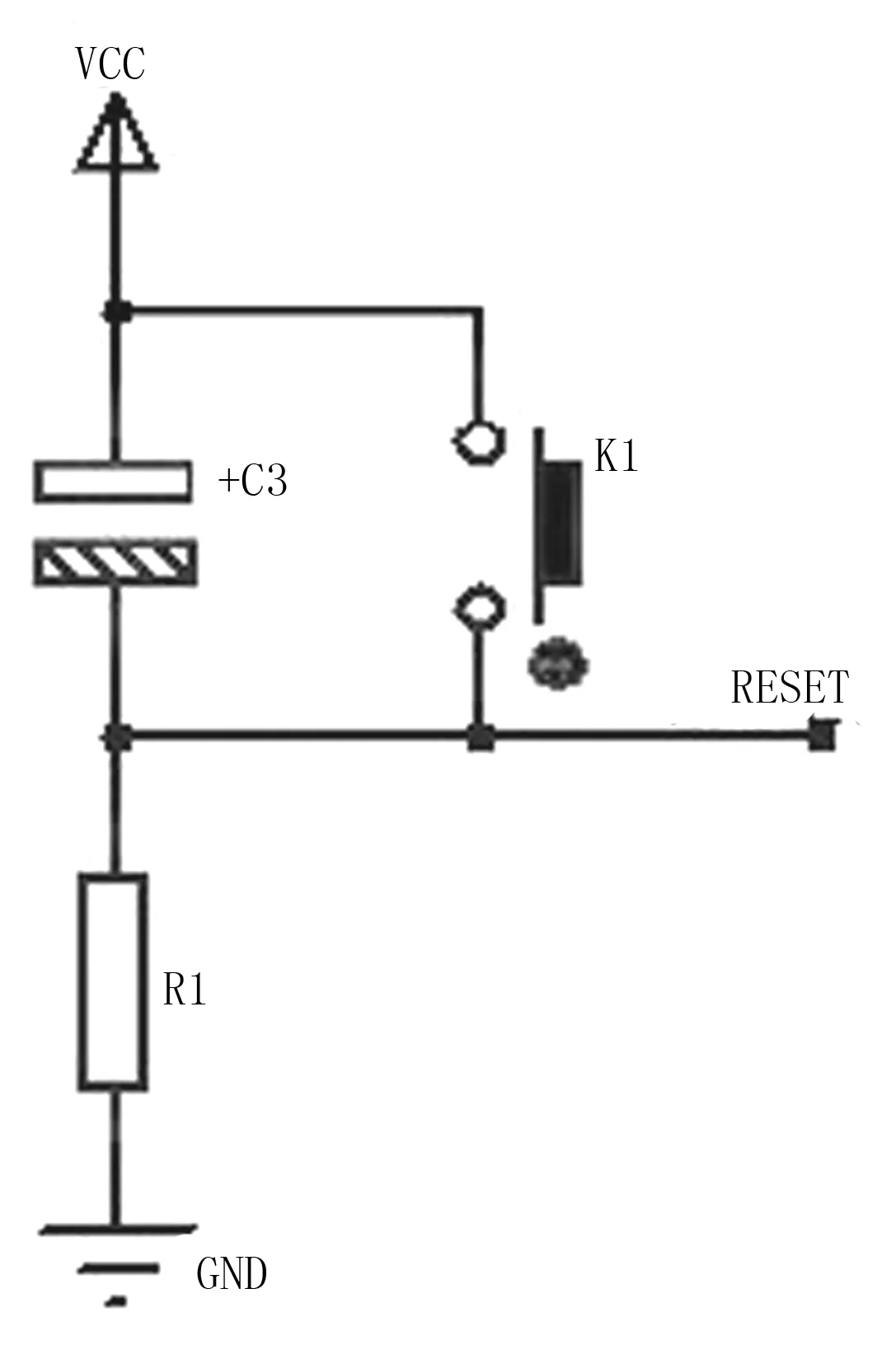
图9 控制系统单片机复位电路
3 智能识别的自动喷药装置实验
本文的智能自动化喷药装置在果树上设置传感器,并且安装摄像头,以实现病虫害数据的实时收集,通过系统通信将病虫害数据传给数据库,由专家对病虫害做出诊断,通过诊断得到病虫害比较密集的果树,其框架结构如图10所示。利用物联网通信可以实现病虫害的实时监控,本实验选用红外线传感器来监测待喷药目标果树。根据果树喷药作业的实际环境,选择漫反射红外线开关,在监测到待喷药目标果树时,红外线发射器可以发射出足够的光线,光电开关产生信号。实验方案如图11所示。
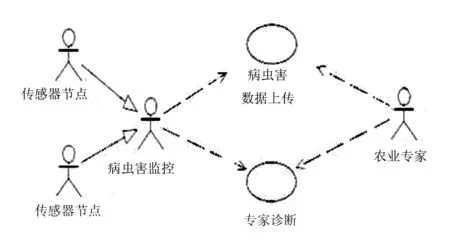
图10 基于物联网的病虫害识别
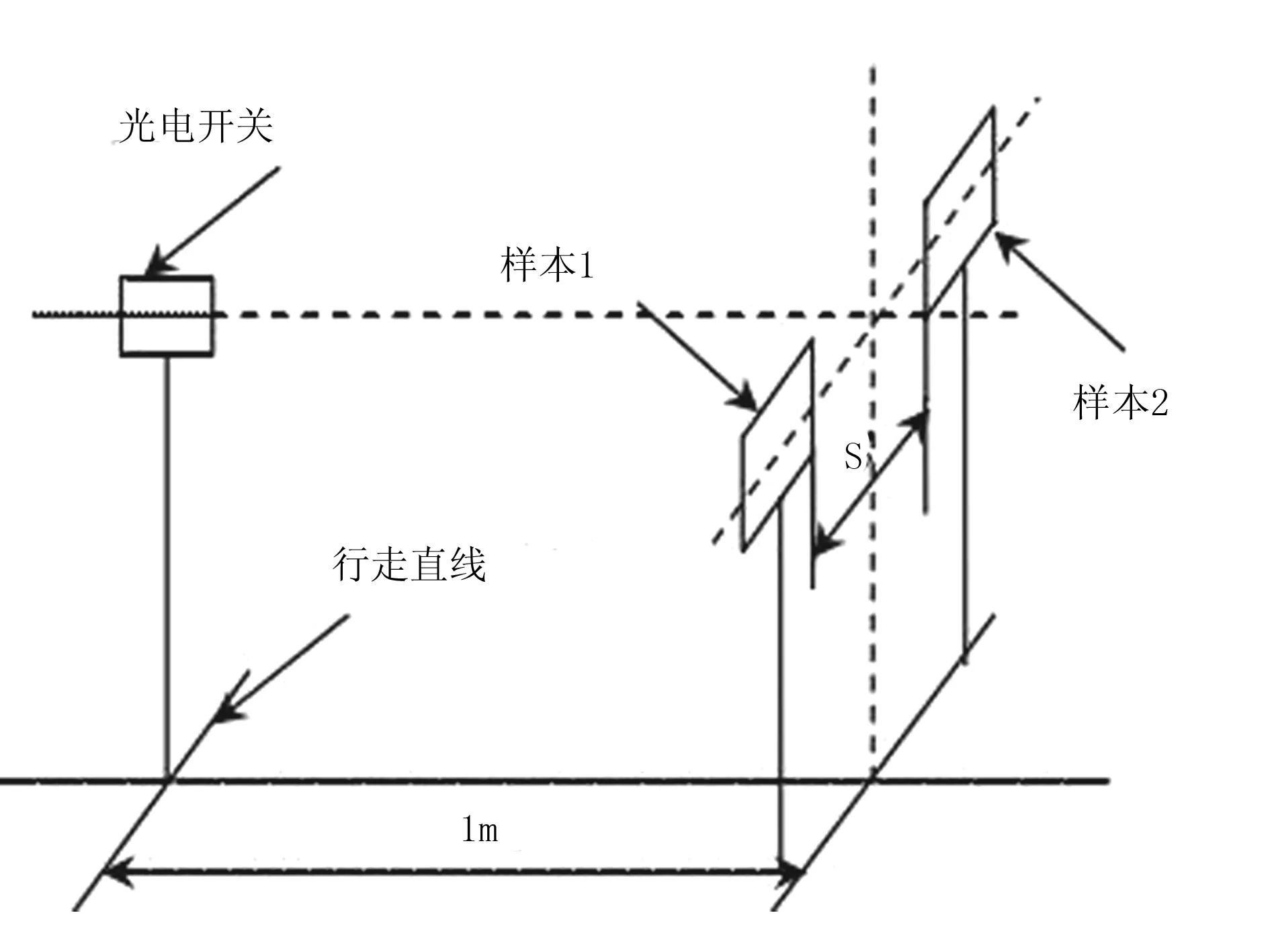
图11 实验方案示意图
进行实验时,将红外线固定在一个位置,然后将装置的电位器旋钮进行旋转,从而得到最大的额定监测距离。使用3种不同颜色的物体作为监测对象,得到了如表1所示的实验结果。
表1 智能喷药装置目标识别实验结果
Table 1 The experimental results of intelligent spraying device for target recognition m

测试编号白色盆栽距离红色盆栽距离绿色盆栽距离110.1110.0510.01210.2210.1310.0339.9110.069.98410.039.969.99510.259.989.97标准差0.120.050.06
结果表明:实验10m的范围内,智能喷药装置可以准确的识别3种颜色的盆栽目标,标准差最大仅为0.12。当喷药装置以1m/s的速度行进时,只要系统的延时小于或者等于目标宽度时,便可以准确地识别目标,其识别的精度和延时有关。因此,在设计智能喷药装置时,需要充分考虑系统的控制精度,以提高目标识别的准确性。
4 结论
设计了一种新式的智能化自主喷药装置。该装置利用物联网技术,将自动化喷药装置和实时监控系统结合起来,建立了装置的无线通信网络,并采用AT89S52 单片机完成了整个系统的硬件设计,利用红外线扫描装置实现了待喷药果树目标的智能识别。对装置进行了目标识别的实验,结果表明:在通信系统给出目标位置后,自动喷药装置可以有效地识别3种颜色的盆栽物,识别效率和识别准确率都较高。采用智能化自动喷药装置,改变了长期以来传统的人工喷药方式,有效地提高了喷药过程中人员的安全性,对于提高喷药效率和实现精准化喷药都具有重要的意义。
[1] 李寒,王库,曹倩,等.基于机器视觉的番茄多目标提取与匹配[J].农业工程学报,2012,28(5): 168-172.
[2] 李立君,李昕,高自成,等.基于偏好免疫网络的油茶果采摘机器人图像识别算法[J].农业机械学报,2012, 43(12):209-213.
[3] 胡炼,罗锡文,曾山,等.基于机器视觉的株间机械除草装置的作物识别与定位方法[J].农业工程学报,2013, 29(10):12-18.
[4] 高春城.我国农业发展的资源环境问题与展望[J].当代生态农业,2013,3(4):151-154.
[5] 万宝瑞.当前我国农业发展的趋势与建议[J].农业经济问题,2014,4(1):110-114.
[6] 徐茂,邓蓉.国内外设施农业发展比较[J].北京农学院学报,2014,29(2):75-79.
[7] 熊爱武. 基于车载激光云点数据的道路模型重建[J].地理信息世界,2013,20(6):86-88.
[8] 魏泽鼎,贾俊国,王占永.基于视觉传感器的棉花果实定位方法[J].农机化研究,2012,34(6):66-68.
[9] 刘峰,张明宇.国内外设施农业发展现状及问题分析[J].农业技术与装备,2014,03(23):23-27.
[10] 高国琴,李明.基于K-means算法的温室移动机器人导航路径识别[J].农业工程学报,2014,30(7): 25-33.
[11] 周小波.基于物联网技术的设施农业在线测控系统设[J].太原科技大学学报,2011,32(3):182-185.
[12] 姚世凤,冯春贵,贺园园,等.物联网在农业领域的应用[J].农机化研究,2011,33(7):190-193.
[13] 唐立伟,黄兰清.温室环境多因子综合智能控制策略的应用研究[J].电子机械工程,2009,25(4):57-59.
[14] 刁智华,陈立平,吴刚,等.设施环境无线监控系统的设计与实现[J].农业工程学报,2008,24(7): 146-150.
[15] 杨玮,吕科,张栋,等. 基于ZigBee技术的温室无线智能控制终端开发[J].农业工程学报,2010,26 (3):198-202.
[16] 包长春,石瑞珍,马玉泉,等.基于ZigBee技术的农业设施测控系统的设计[J].农业工程学报,2007, 23(8):160-164.
[17] 齐飞,周新群,丁小明,等.设施园艺工程集成模式构建方法[J].农业工程学报,2011,27(8):1-7.[18] 李莉,刘刚,基于蓝牙技术的温室环境监测系统设计[J].农业机械学报,2006,37(10):97-100.
[19] 唐娟,王文娣.基于新型AVR单片机的温室测控系统[J].微计算机信息,2007,23(9-2):138-139.
[20] 郑丽萍,何东健.基于53C2410A的农田土壤信息采集平台设计[J].农机化研究,2008(6):82-83.
[21] 王石磊,郭艳玲.基于ARM的温室环境控制系统研究[J].林业机械与木工程设备,2008,4(36):20.
[22] 杨凤阁.商业模式创新对企业生态位优化的效应分析田.商业时代,2010,44(31):83-84.
[23] 管继刚.物联网技术在智能农业中的应用明[J].通信管理与技术,2010,4(3):24-42.
[24] 朱晓妹.物联网技术在现代农业信息化中的应用研究[J].沈阳师范大学学报,2010,28(7):391-393.
[25] 陶冶.物联网产业商业模式的探索与创新[J].南京理工大学学报,2010,23(4):15-18.
[26] 闰敏杰,夏宁,万忠,等.物联网在现代农业中的应用[J].中国农学通报,2011,27(8):464-467.
[27] 曹洪太,苏晓峰,孙忠富,等.基于WEB和RS-485总线的分布式远程环境监控系统的实现[J].中国农学通报,2006,22(2):392-396.
[28] 孙忠富,曹洪太,杜克明,等.温室环境无线远程监控系统的优化解决方案[J].沈阳农业大学学报, 2006,37(3):270-273.
Abstract: g, selectivity of fruit trees for automatic spray, the infrared scanning technique can achieve precise spraying on target, using AT89S52 SCM to realize the automatic control of the whole system. Simulate the actual spraying fruit trees environment and in Laboratory of pesticide spraying device automatic and the experimental study is carried out on the target function, the respectively by the three kinds of different colors of the subject matter, it can be seen from the experimental results, within the range of experimental 10m, intelligent spraying device can be accurate knowledge in three different colors of potted target, the standard difference maximum is only 0.12, recognition accuracy and higher efficiency, for the development of orchard automatic spray device, which provides technical support.
ID:1003-188X(2017)08-0224-EA
Research on Automatic Spraying Machine for Intelligent Monitoring of Agricultural Pests and Diseases Based on Internet of Things
Fang Yaqun1, Gu Lifen2, Zhang Li3
(1.Jiangsu Food & Pharmaceutical Science College,Huai’an 223003,China; 2.School of Computer and Information Engineering,Jiaozuo Teachers College,Jiaozuo 454000, China;3.Wuhan Qingchuan College,Wuhan 430064, China)
spraying device; networking technology; automatic target detection; real-time monitoring
2016-07-06
江苏省农业科技自主创新项目(CX(16)60732)
房亚群(1981-),女,江苏宿迁人,讲师,硕士。
张 莉(1978-),女,武汉人,硕士,讲师,(E-mail)xiongfangzi1981@sina.com。
S491;TP277
A
1003-188X(2017)08-0224-04
