木薯形态及其收获起拔力分析
2017-12-16陈炎杰廖宇兰刘世豪周海杰
陈炎杰,廖宇兰,刘世豪,周海杰
(海南大学 机电工程学院, 海口 570228)
木薯形态及其收获起拔力分析
陈炎杰,廖宇兰,刘世豪,周海杰
(海南大学 机电工程学院, 海口 570228)
为了得到木薯机械化收获中的挖拔零部件的设计参数和木薯全株各种形态特征之间的关系,采用了实地田间抽样的调查统计方法,对木薯关键形态特征(全株重量、根块俯视投影面积,茎秆截面面积)进行了统计分析。以统计数据和相关公式计算为前提,进行数学建模,得出可靠的木薯块根的最大起拔力。结合木薯的主要形态特征和最大起拔力要求,可为挖拔式木薯收获机提供设计参考数据。
木薯;挖拔式收获机;起拔力;木薯形态;数学建模
0 引言
我国木薯种植面积2015年已经达到70万hm2,预计5年内木薯在国内种植面积超过150hm2。随着木薯产量的不断提高,人工收获木薯已经不能满足目前的需要,对木薯自动化收获的要求和效率也越来越高。目前,我国已经对木薯收获机器进行了较多的设计研究,取得了一定的成就,但木薯的形态特征研究和基础理论研究相对较少,无法满足快速增长的木薯收获需求,挖拔式木薯收获机器还处于初级研究阶段。为此,本文对木薯的关键形态采用了田间实地抽样调查的方式进行了统计分析,通过查阅相关公式和数学建模,模拟木薯根块起拔过程,得出其最大起拔力。这些数据为木薯挖拔式机械收获提供了必要的基础理论参考,该研究对快速拔出、降低薯块伤薯率和提高挖拔式木薯收获机性能具有重要意义。
1 木薯全株选样形态分析
试验用木薯为海南大学儋州校区木薯种植试验地种植的木薯,因为木薯根块收获成熟期在12月-1月,采样日期为2015年1月20日。木薯种植基地种植面积较大,品种多样,所以采用系统采样的抽样方法,把试验田分成4个群体,然后在每个群体中随机抽样10个木薯全株样品。木薯取样尽量保证无病虫害和无折断的健康木薯全株。人工取样过程中,尽可能不去破坏其茎秆和根块形态,保证其木薯完整性。具体测的数据为:①全株质量;②根块果实俯视投影面积;③茎秆截面面积。其分布统计图如图1~图3所示。
由图1~图3可以求出木薯的主要影响起拔力的3个形态特征的平均值。3个主要特征(木薯茎秆横截面直径、木薯根块俯视投影面积、木薯全株质量)都近似正态分布,平均值分别为29.3mm、395.4cm2、3.86kg。
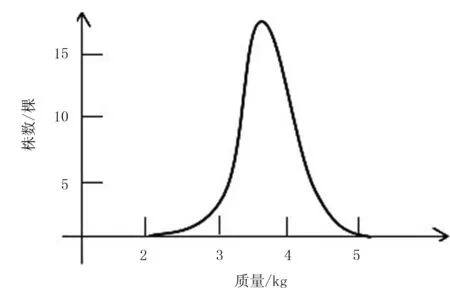
图1 木薯全株重量分布图
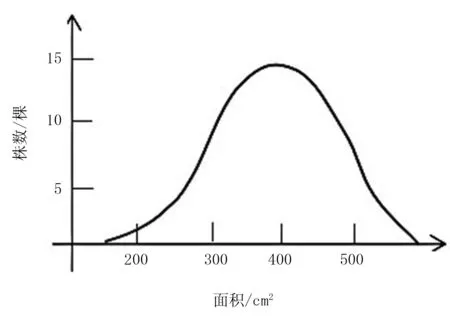
图2 木薯块根俯视投影面积分布图
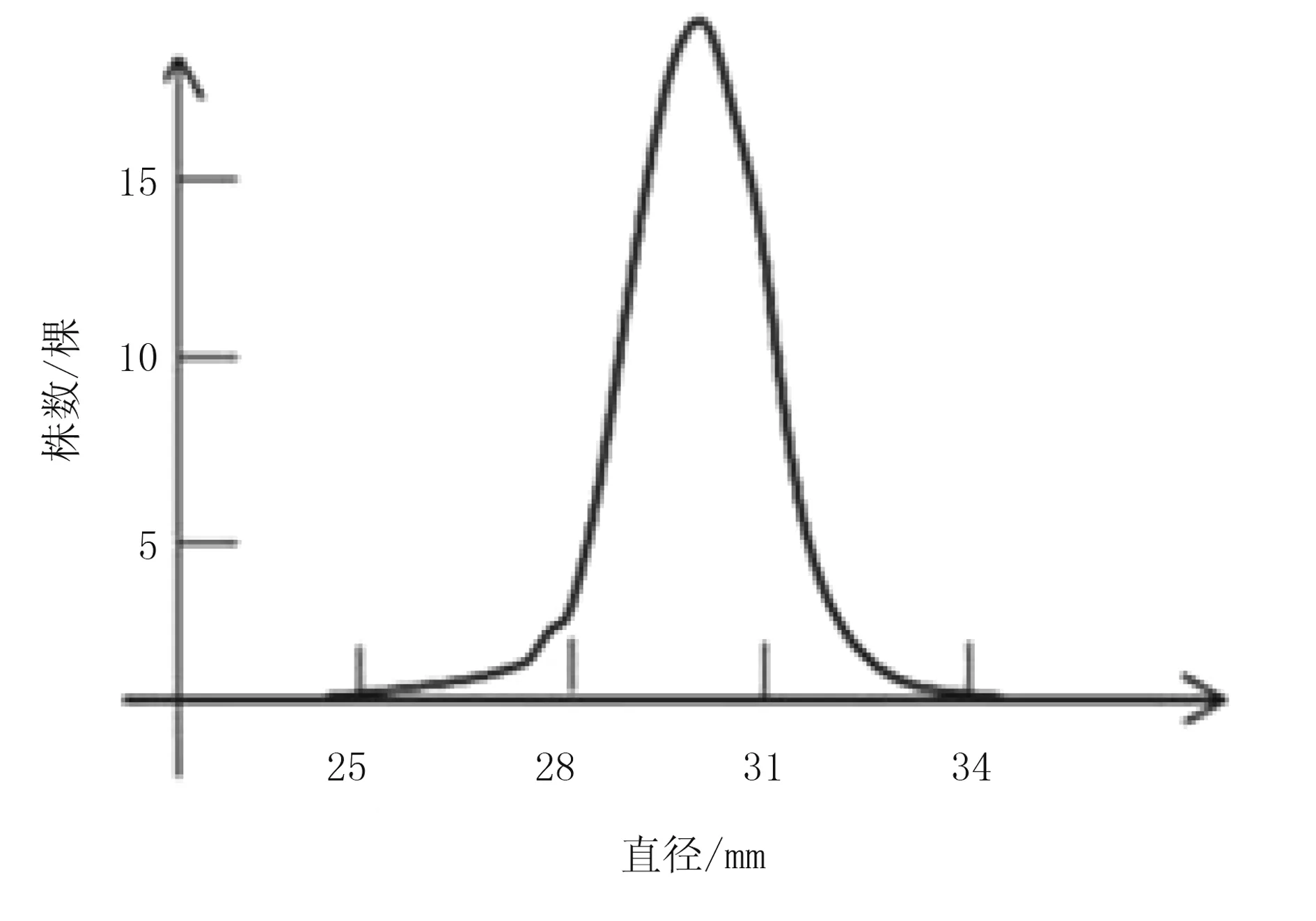
图3 木薯茎秆横截面直径分布图
2 木薯茎秆的极限拉拔力测试分析
木薯主要由茎秆和块根两部分组成。在拉拔式机械收获木薯时,夹持机构主要夹持木薯茎秆部分,设计时需要知道并且测试木薯茎秆能承受的极限竖直向上起拔力,同时也要考虑茎秆和块根能承受的极限分离力。
2.1 试验材料
试验所用的木薯茎秆均采集于海南儋州种植的基地,分别取自试验田划分的4个群体中,每个群体抽样木薯茎秆5株,样本尽量选取生长良好、无病虫害的。
2.2 试验方法
根据农艺和挖拔式木薯收获机的要求,夹持木薯茎秆的最佳位置为距离地面20~30cm,截取木薯根块底部到茎秆50cm,如图4所示。
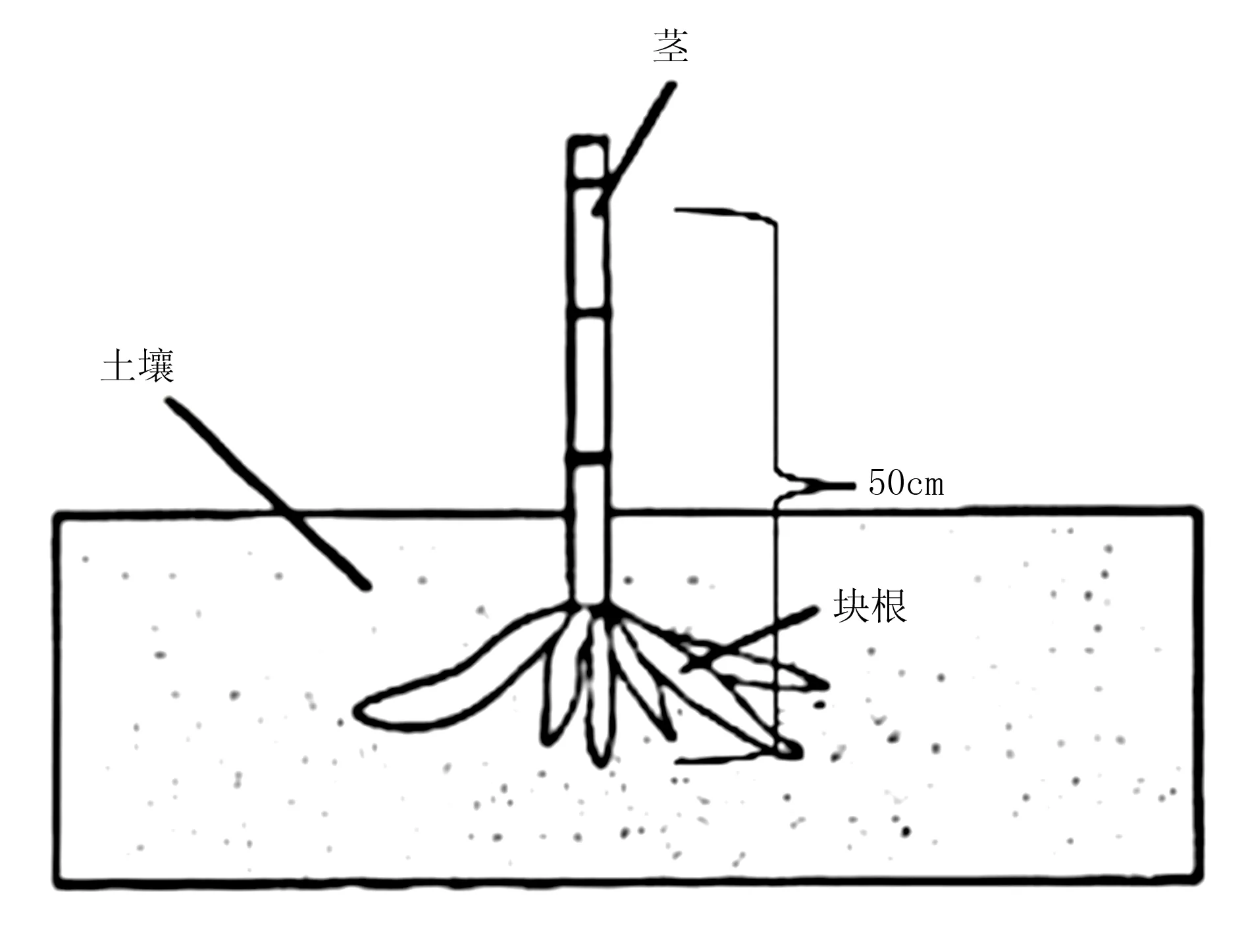
图4 木薯块根截取图
把20个样品分别标记打乱,设计一个木薯最大起拔力测试系统,如图5所示。
测试系统中夹持木薯茎秆方式为现在挖拔式木薯收获机的主流夹持机构:①夹持带式(柔性夹持系统),如图6所示;②夹持链轮(刚性夹持系统),如图7所示。
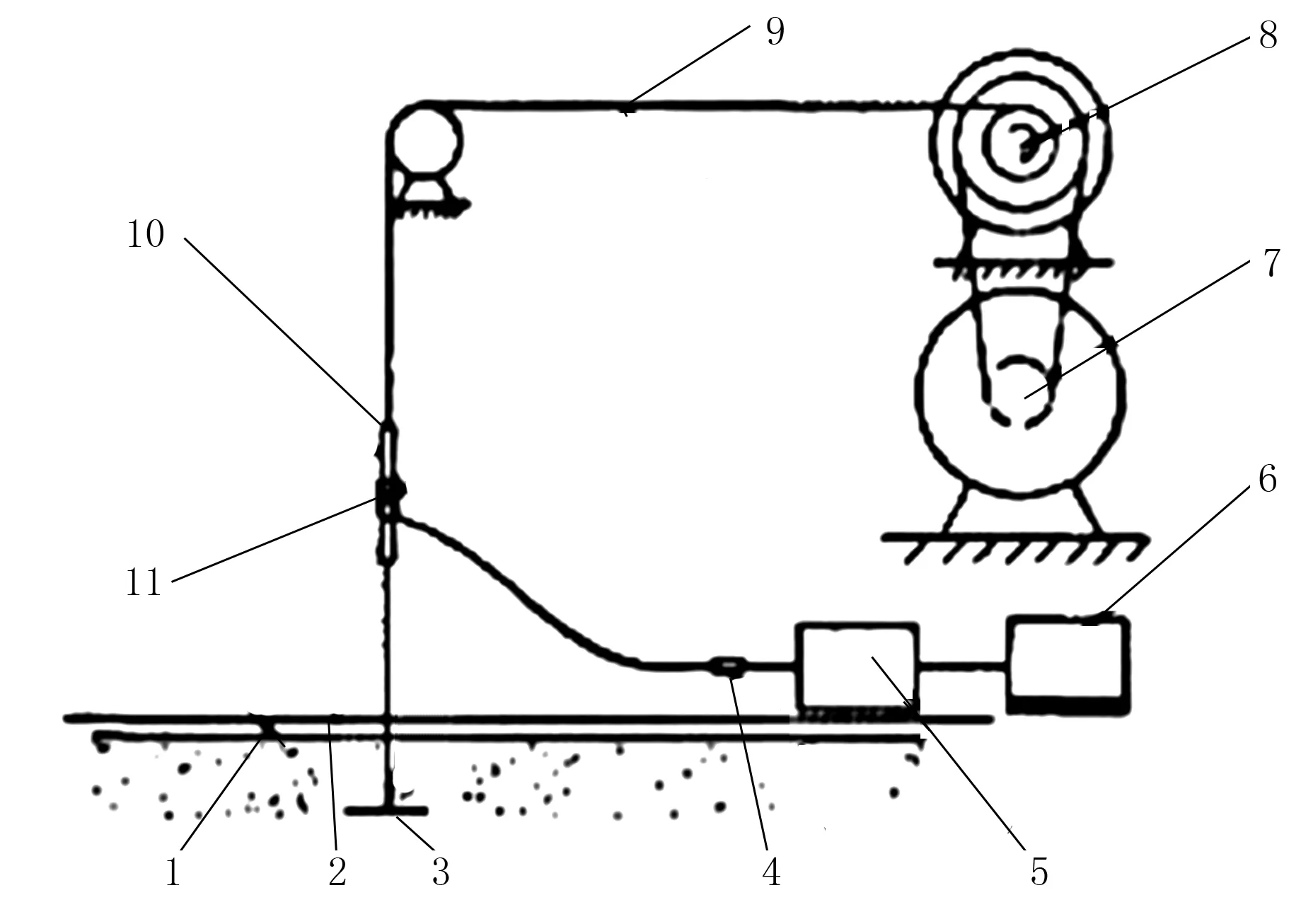
1.土壤 2.土槽 3.圆盘 4.粉盒 5.应变测试仪 6.笔记本电脑 7.电机 8.转动轴 9.钢丝绳 10.钢条 11.应变片
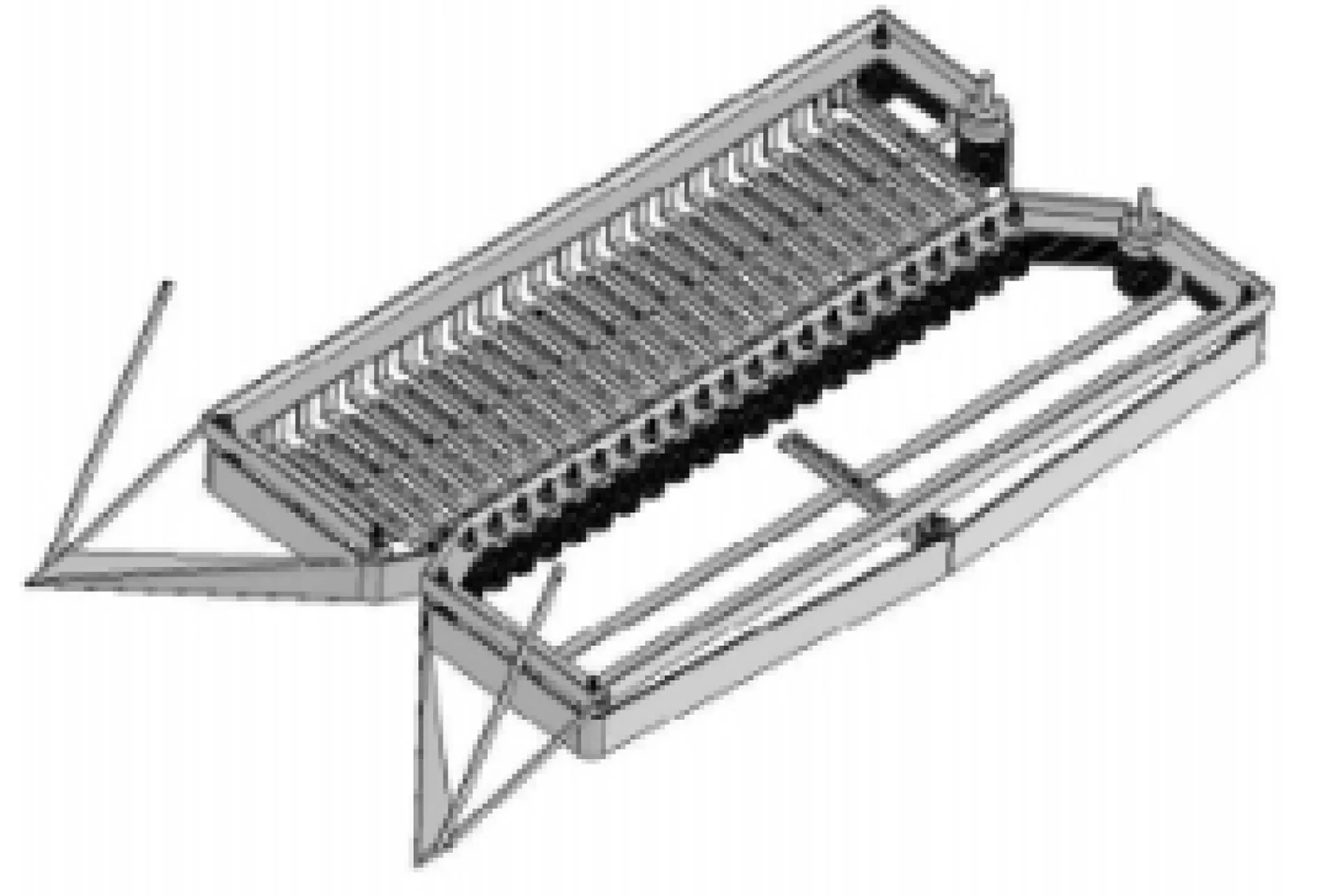
图6 夹持带式输送机构

图7 夹持链轮式输送机构
每种夹持方式分别随机抽取10个样品测试,结果如表1和表2所示。

表1 夹持带式输送机构测试结果
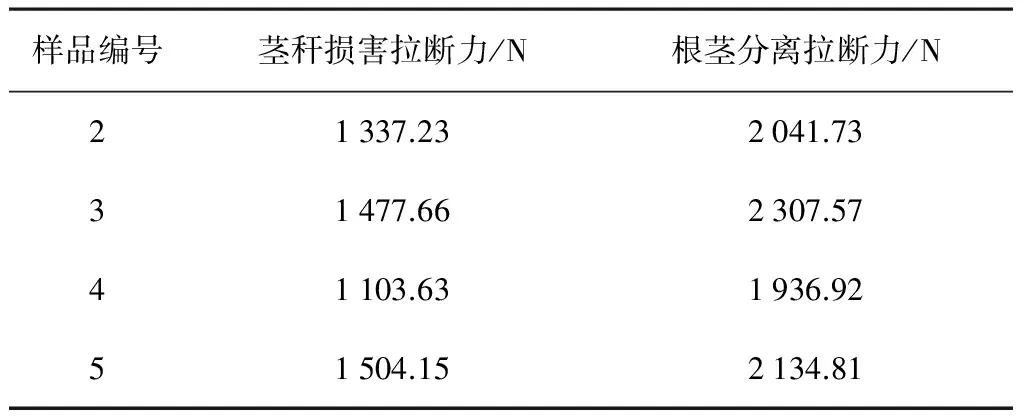
续表1
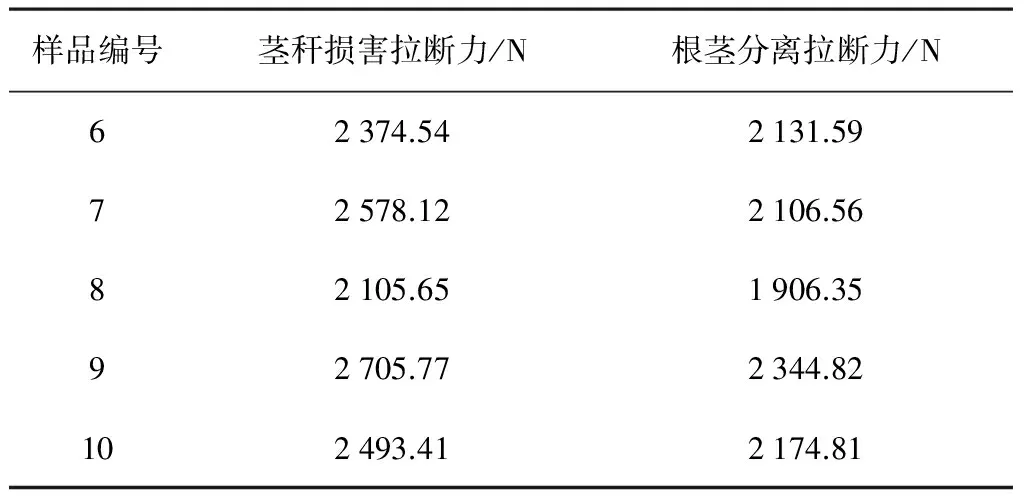
表2 夹持链轮式输送机构测试结果
测量茎秆破损拉断力可以测出茎秆在不破损情况下能承受的最大向上拉断力;测量根茎分离拉断力,可以测量出木薯全株根块和茎秆的极限分离力。通过试验可得:木薯全株完整挖起力约为1 800~2 700N之间。所以,超过1 800N的拔起力就有破坏木薯完整的风险,而且刚性夹持系统(夹持链轮)能提供更大的向上拔起力。
3 木薯块根拔起力计算分析
木薯根块被挖拔式收获机器拔起时,木薯受到的各种阻力包括土壤对块根的吸附力F1、土壤剪切力竖直方向的分力F2、土壤与块根之间的摩擦力F3、粘附在块根上的土壤重力G1、木薯自身的重力G2的作用。因此,木薯块根的起拔力为
F=F1+F2+F3+G1+G2
在海南儋州木薯种植田,选取4块种植田,分别测量其土壤的含水率、土壤密度、硬度值和内摩擦角。种植田主要数据如表3所示。
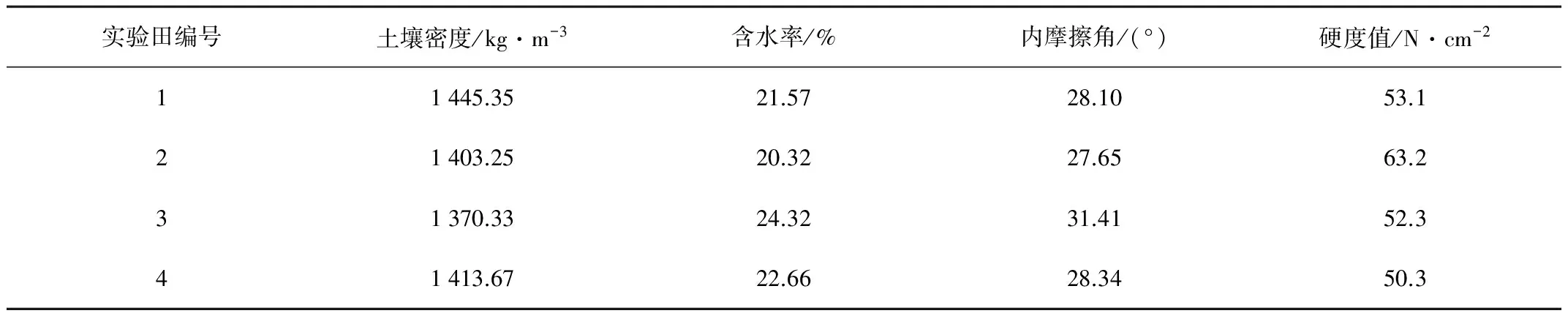
表3 种植田主要数据
因此,为了更精确地得出块根拔起力,假设木薯块根对土壤作用为圆盘和该圆盘外块根的作用力。
3.1 土壤对块的吸附力F1
块根拔起时的吸附力与土壤的硬度、土壤含水有关,则
F1=0.1×π×R2×Ps
3.2 土壤剪切力竖直方向分力F2
根据土壤性质和实验数据分析,土壤剪切失效面为45°~ψ/2,故取
式中H—剪切圆盘的深度(m);
R—莫尔应力圆半径(m);
τA—微土圆盘边缘失效面的土壤动态剪切强度(Pa)。
dh—微土圆盘所在深度。
3.3 土壤与块根之间的摩擦力F3
由于木薯块根果实与土壤间的摩擦较为复杂,因此,根据草本植物根部与土壤相互作用力学模型,则
式中Z—木薯根块所在深度(m);
v—块根和土壤的摩擦系数;
P(z)—块根的竖直分布函数;
Q(z)—为块根数目的竖直分布函数。
3.4 粘附在块根上的土壤重力G1
根据圆盘失效面为45°,和土壤与块根附着力,故取
G1=πr2h×β×α
式中r—圆盘半径(m);
h—块根深度(m);
β—土壤体积质量1.459×103kg/m3;
α—粘附系数。
3.5 木薯自身重力G2
通过测量得出木薯自身重力。根据木薯块根果实拔起的物理试验和力学模型,可以合理得出块根拔起力的理论值。计算时,块根深度取为150~250mm,莫应力圆盘直径为80~120mm,拔起速度为100mm/s,结果表4所示。

表4 木薯块根理论起拔力的计算值
由表4可知:木薯最大起拔力随着块根深度和圆盘直径增大而增大。
4 结论
1)通过木薯全株抽样调查分析,可得出热带地区木薯的茎秆横截面直径、木薯根块俯视投影面积和木薯全株质量都趋于正态分布。可以根据以上3个主要影响木薯起拔力的特征的平均值,较为可靠地利用其平均值作为基础研究和算出理论起拔力值。
2)因为木薯拔起过程,被夹持的茎秆和茎根的结点都会受到破坏,拉拔过程必须保证其破坏不会影响收获机的挖拔。所以,根据设计的拔起力测试实验,能有效地得出木薯的极限拔起力必须小于1 800N,才能保证绝大部分木薯能顺利全株拔起。
3)实地木薯拉拔试验过程中,刚性夹持系统能提供更大的向上拔起力, 以保证木薯的顺利拔起。
4)通过建立数学模型和参考相关书籍及论文的公式,可以得出木薯块根挖起所需的挖拔力(没有疏松土壤的情况)小于 1 847N。
5)根据以上所有数据,可得木薯收获机器中的夹持设备只要提供1 200~1 600N左右的向上挖掘力,配合挖掘铲的疏松功能(可以减少向上挖掘阻力200~400N),就可以成功挖掘绝大部分大部分木薯。
6)根据相关实验,刚性的夹持系统能提供更大的挖拔力,且更能有效和稳定地挖拔起木薯。
[1] 王小瑜,崔荣江,荐世春.大蒜种体形态分析及植株收获性能试验研究[J].农机化研究,2015,37(9):202-205.
[2] 余瑞明,廖宇兰,刘世豪.木薯收获机夹持输送机构设计与力学分析[J].农机化研究,2015,37(8):74.
[3] 蒋汇川,韦鹏练,李宁.木薯粗根纤维形态、组织比量及化学成分分析[J].广西林业科学,2009(12):4.
[4] 高海青,陈思刚.前置式大蒜收获机研发[J].河北农机视界,2015(12):13-15.
[5] 李霞,张东兴,张瑞,等.土壤物理特性对深松阻力影响的试验[J].江苏大学学报:自然科学版,2014(1):34-39.
[6] 韦东萍,韦剑锋.木薯种植对土壤性状的研究进展[J].贵州农业科学,2014(41):34-37.
[7] 杨望,蔡敢为,杨坚,等.木薯块根拔起力的力学模型和数学模型分析[J].农业工程学报,2011,27(11):95-100.
[8] 廖于兰,孙佑攀,林大春.木薯收获机器研究进展[J].热带农业工程,2009,33(1):54-57.
[9] Shereif H Mahmoud, J Adamowski, A A Alazba,et al.Rainwater harvesting for the management of agricultural droughts in arid and semi-arid regions[J].Paddy and Water Environment,2016,1(14):1-20.
[10] 曾德超.机械土壤动力学[M].北京:北京科学技术出版社,1995:286.
[11] 张孝安.农业机械设计手册[K].北京:中国农业科学技术出版社,2007.
Analysis of Uprooted Force and Morphology on Cassava
Chen Yanjie, Liao Yulan, Liu Shihao, Zhou Haijie
(College of Mechanical and Electrical Engineering ,Hainan University, Haikou 570228,China)
In order to explore the relationship between design parameter on the digging component of Cassava Machine and the morphological characteristic of Cassava. Firstly ,the key morphological characteristic of Cassava(the weight ,the root’s acreage of vertical view ,the cross section of stem)was determined the testing date and correlation formula to begin mathematical modeling for calculating the mix uprooted force .Researching the key morphological characteristic of Cassava and demand of uprooted force provides parameter basis for the design of digging-Cassava harvest Machine.
cassava; harvest machine; uprooted force; morphology of cassava; mathematical modeling
2016-06-14
国家自然科学基金项目(51365011)
陈炎杰(1991-),男,广东湛江人,硕士研究生,(E-mail)423304949@qq.com。
廖宇兰(1967-),女,广东兴宁人,教授,硕士生导师,(E-mail)liaoyulan@sina.com。
S183
A
1003-188X(2017)08-0195-04
