基于Delphi可视化编程的旋耕埋草机功耗检测研究
2017-12-16李江华
陆 洲,李江华
(1.包头轻工职业技术学院 电子商务学院,内蒙古 包头 014035;2.内蒙古工业大学 信息工程学院,呼和浩特 010051)
基于Delphi可视化编程的旋耕埋草机功耗检测研究
陆 洲1,李江华2
(1.包头轻工职业技术学院 电子商务学院,内蒙古 包头 014035;2.内蒙古工业大学 信息工程学院,呼和浩特 010051)
旋耕埋草机在作业过程中受到的阻力较大,尤其是在土壤粘重的地区作业,其功耗问题是制约该机发展的重要因素。针对高茬秸秆还田旋耕埋草机实际功耗大小不清楚、刀辊作业时运动参数与功耗的关系不明确等问题,根据功耗检测的基本原理,采用Delphi可视化编程软件,设计了一种新的旋耕埋草机功耗检测系统。该系统由4个模块组成,包括设计采集模块、传感器模块、数据分析模块和Delphi可视化显示模块。将该系统安装在旋耕埋草机上,对其性能进行了检测,并得到了转速、力矩和功耗等检测结果。该检测结果通过数据处理可以在Delphi开发的界面上进行可视化显示,为旋耕埋草机动力分配和节能降耗的研究提供了可借鉴的数据参考。
旋耕埋草机;功耗检测;Delphi界面;可视化
0 引言
秸秆的机械化还田有利于培肥地力、改良土壤,是现代化生态农业和农业可持续发展的基础。高茬秸秆旋耕埋草机是重要的土壤耕作机械,同轮式拖拉机配套使用,耕作1遍即可完成秸秆的破碎、秸秆掩埋、旋耕碎土、田地平整等多种作业项目,使用范围广,作业效率高,操作简便,可以节省劳动力成本,缩短作业周期。旋耕埋草机的核心部件是刀辊,其功率消耗是影响旋耕埋草机作业性能的重要参数,直接影响到整机的作业性能。因此,只有设计合理并且配套的刀辊,才能降低旋耕埋草机的功耗,对于旋耕埋草机功耗的测试对刀辊数据优化、整机动力分配和节能降耗具有重要的意义。
1 旋耕埋草装置和功耗测试Delphi可视化编程
秸秆的机械化还田可以将收获后的残留作物切碎直接翻入土中,从而使其腐烂作为土壤的底肥。该方法省去了砍、捆、运、铡、枢、翻、送、撒等一系列复杂的作业工序,降低了成本,实现了施肥方式的重大变革。秸秆的机械化还田使用最多的装置是旋耕埋草装置,其结构如图1所示。
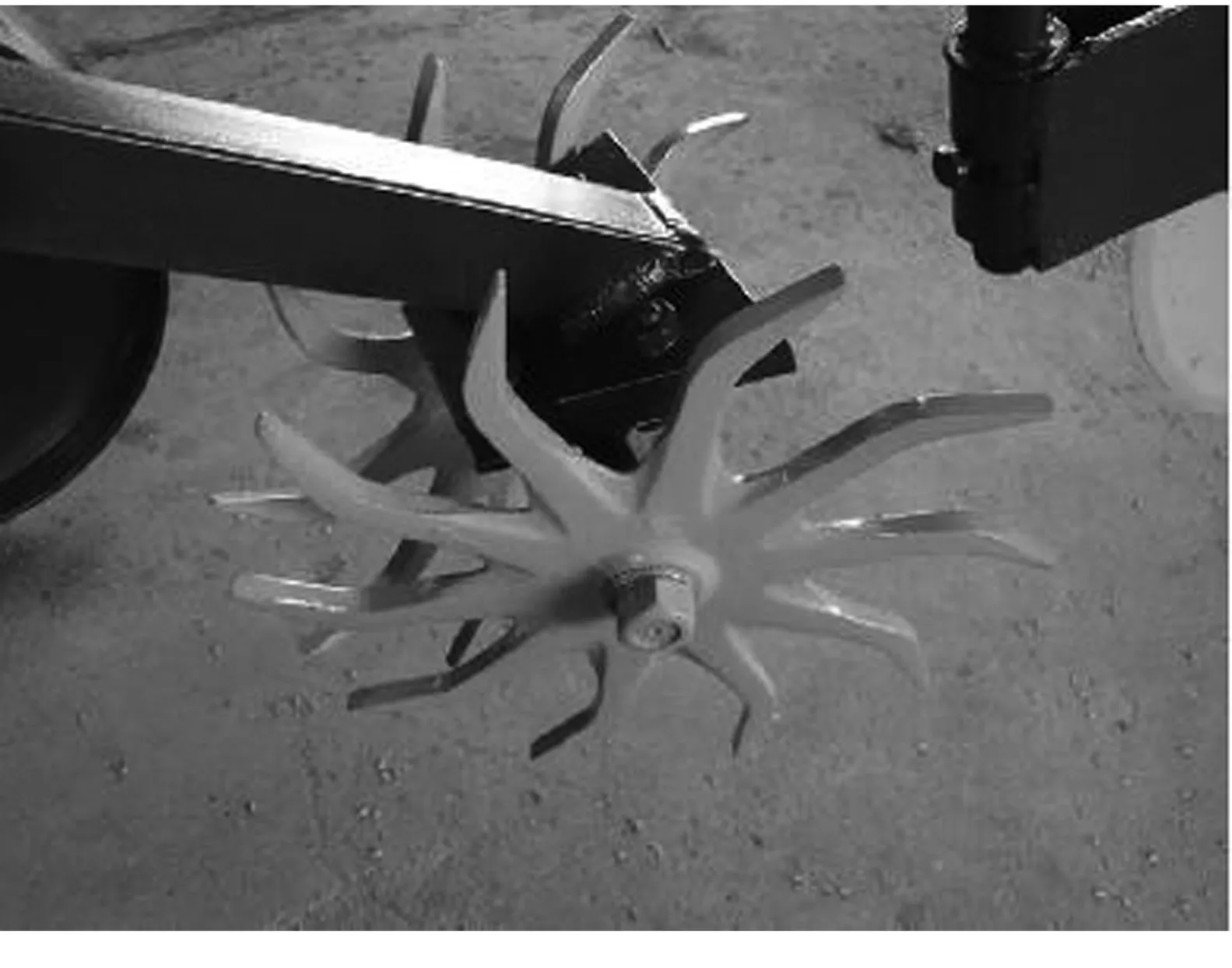
图1 旋耕埋草装置
工作时,刀辊可以将作物破碎,并埋入土中。该装置在作业时由于受到阻力较大,其功耗较高。由于全球能源危机,农业机械功耗越来越受到关注,旋耕装置如果在土壤粘重的地方作业,其作业功耗很难被农户所接受,因此对旋耕装置的功耗进行测试和优化,具有重要意义。本次设计的功耗测试框架如图2所示。
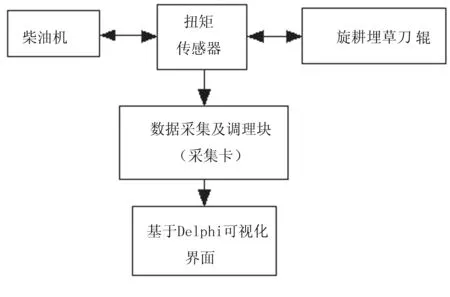
图2 旋耕装置功耗测试基本框架
旋耕装置功耗测试系统共分为4个模块,包括旋耕埋草机、传感器、数据采集和调试模块及虚拟仪器可视化分析模块。旋耕埋草机负责提供实验环境,传感器负责数据的采集和处理,数据通过数据采集和调试模块进行分析,最后将这些功能统一集成到Delphi可视化界面上,可以方便地通过按钮进行操作。其软件设计框架如图3所示。
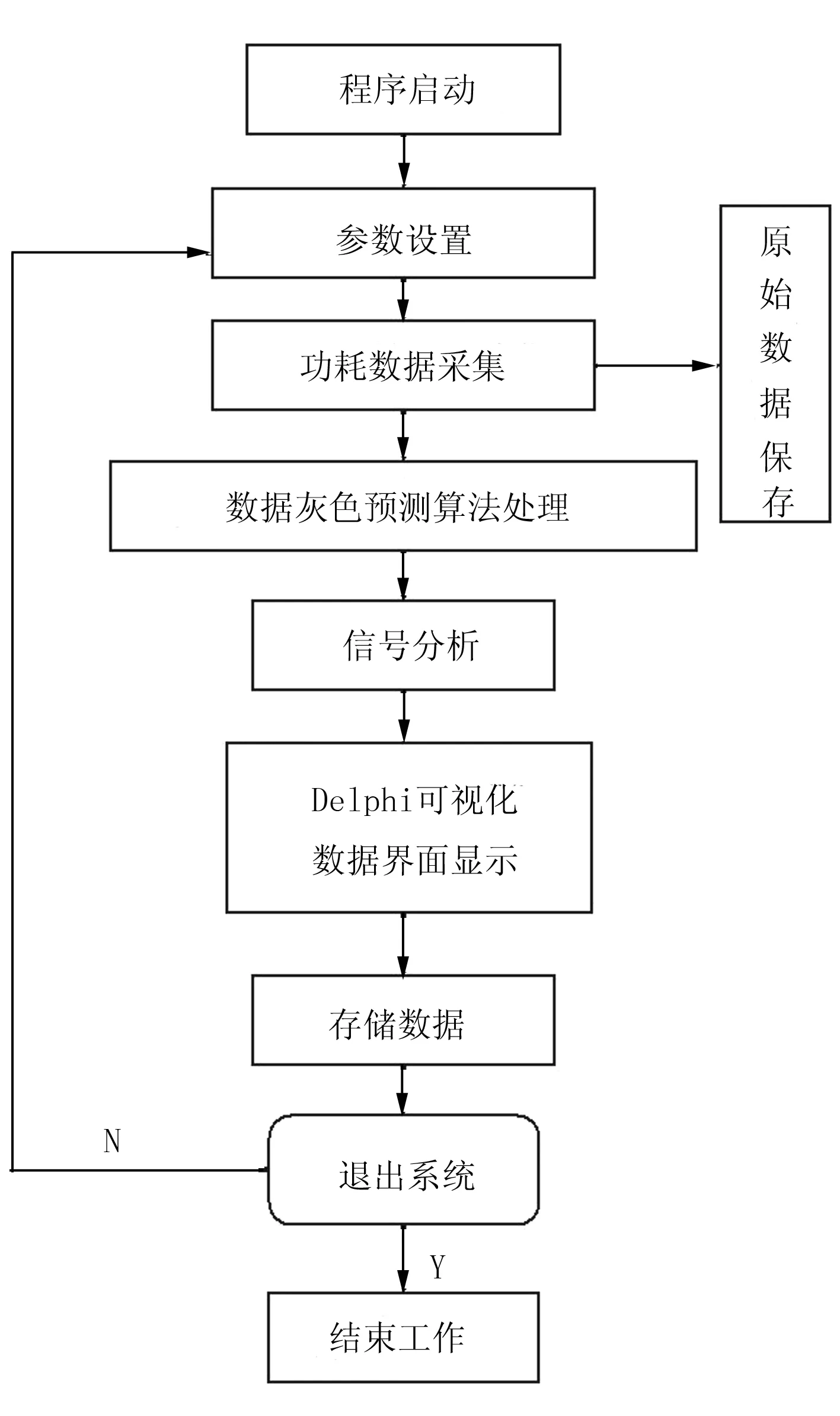
图3 软件部分设计框架
在进行功耗测试时,首先在Delphi界面进行参数设置,然后开始数据采集并将信号进行实时保存,将采集的信号进行信号处理和数据分析.将分析结果可视化显示在Delphi界面,并将结果保存。为了提高数据分析的精度,对采集得到的数据进行灰色预测分析,将分析结果显示和保存后便可以退出系统。
2 旋耕埋草机功耗检测灰色预测模型
灰色系统是对数据模糊或者不确定的数据进行预测的一种模型。该模型可以根据历史数据和当前数据输出外来数据,利用它可以有效地对旋耕埋草机的功耗模型进行预测。灰色预测模型使用最多的是GM(1,2)模型,它的离散型灰色预测模型为
x(k+1)=[(2-Ta)-(1-Ta)z-1]x(k)+
TbΔu(k)
(1)
其中,z-1表示滞后算子;x(k)和x(k+1)表示功耗检测数据的当前实际输出和下一个时刻的输出;a和b表示需要预测时的参数,被称作发展系数和灰色作用系数;T表示采样周期;u(k)表示控制函数。这种模型预测一般都会存在误差,当GM模型的精度不高时,预测结果会出现偏差,把因预测精度造成的误差称作预测误差。灰色预测系统一般使用3种方法来检验误差,即残差、关联度、后验差,本次研究取平均误差为
(2)

E=(1-q)[xr(k+1)-x(k+1)]+
q[xr(k)-x(k)]
(3)
其中,xr(k+1)-x(k+1)和xr(k)-x(k)分别表示预测的偏差值和输出的偏差值,期望值可以取为
xr(k+1)=rxr(k)+(1-r)w
(4)
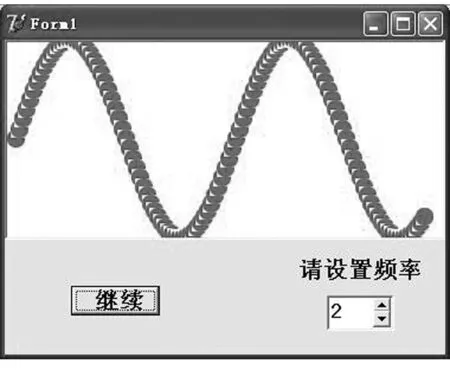
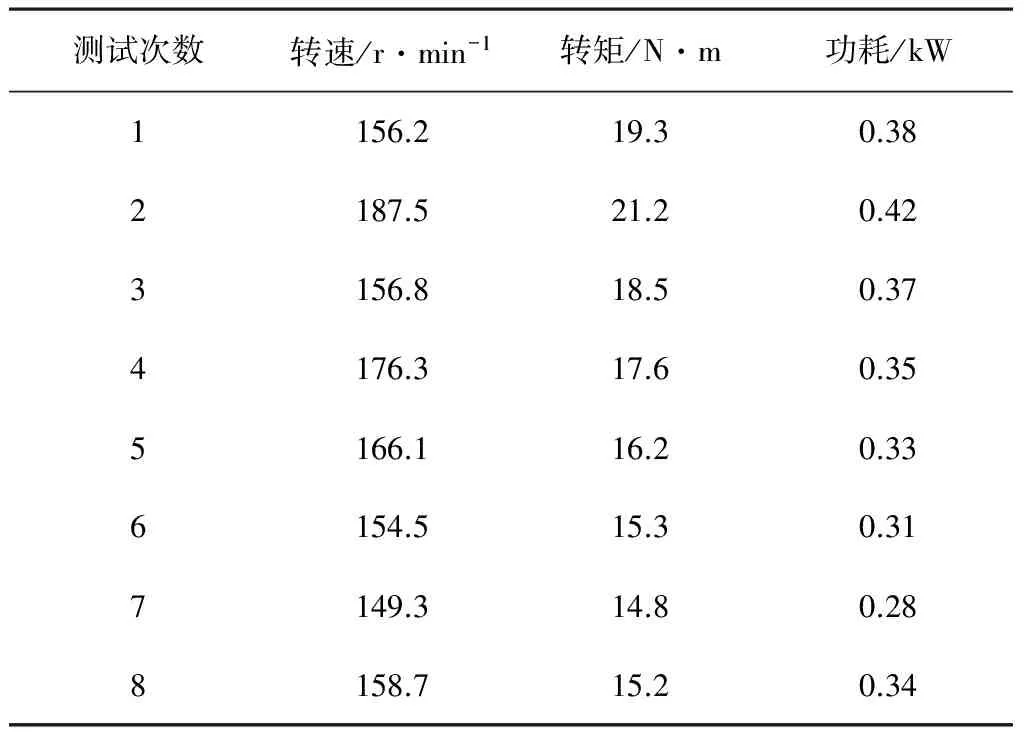
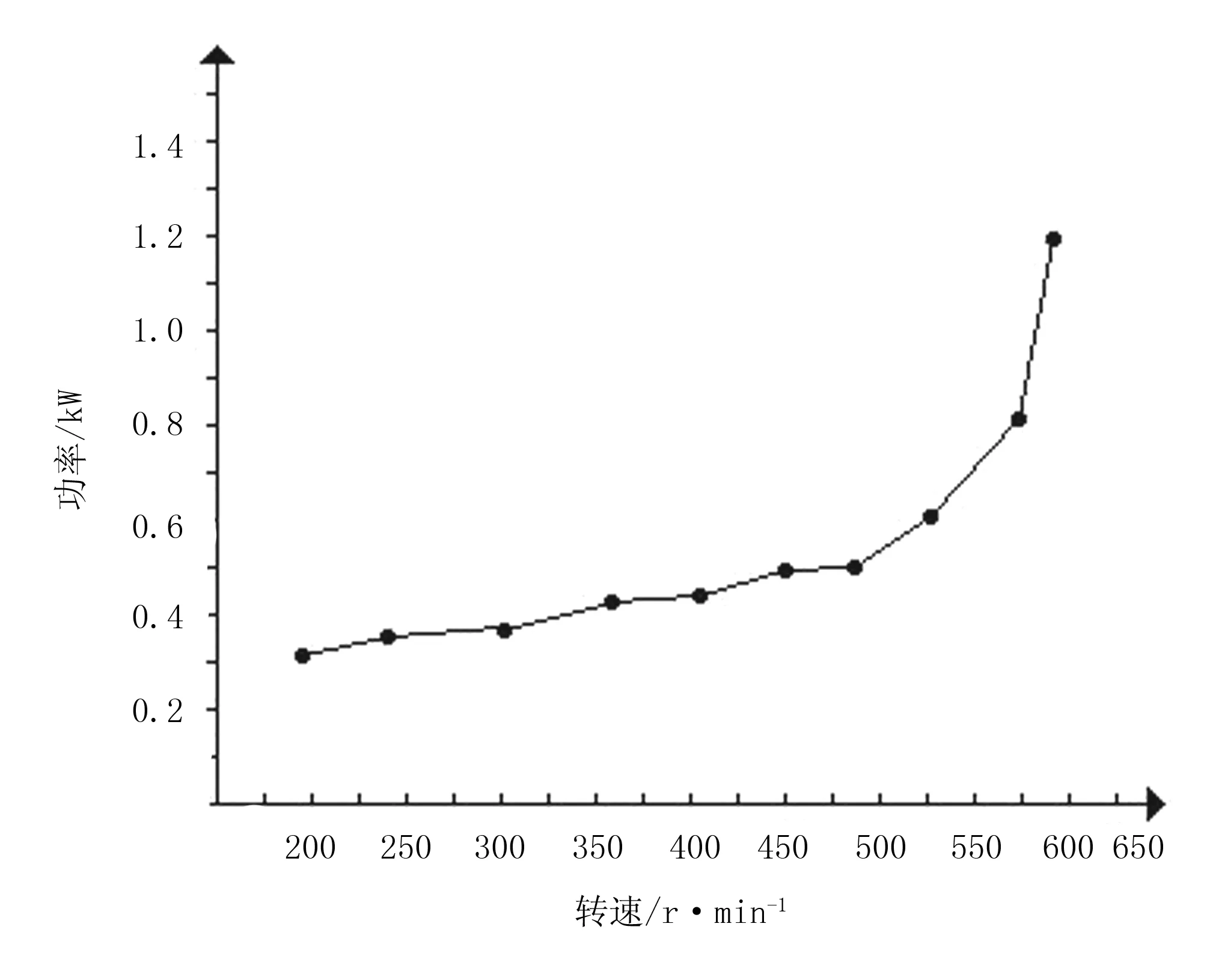
其中,w为被预测对象输出的设定值,0 J=λ1{(1-q)[x(k+1)-xr(k+1)]+ q[x(k)-xr(k)]}2+λ2[Δu(k)]2 (5) 其中,λ1和λ2分别为综合偏差的控制增量权系数。 将公式(1)带入公式(5),可得 (6) (7) 于是最优控制量为 u(k)=u(k-1)+Δu(k) (8) 综合上述,对旋耕埋草机功耗数据处理的灰色预测模型算法的步骤如下: 1)估计旋耕埋草机功耗数据模型的参数,并根据公式(1)建立灰色预测模型; 2)通过式(2)进行计算; 3)通过式(4)进行计算; 4)通过式(7)和式(8)进行计算; 5)返回1)。 通过以上步骤,便可以通过对旋耕埋草机功耗数据的采集,预测功耗。利用功耗模型,可以对旋耕埋草机的装置进行优化设计,以降低其功耗。 为了检测旋耕埋草机功耗,专门开发了Delphi可视化界面,并采用田间试验的方式,对旋耕埋草装置的功耗进行测试。本次试验将旋耕埋草装置安装在了普通的免耕播种机上,如图4所示。 图4 免耕播种机测试实验 在进行播种之前,首先需要进行旋耕埋草操作,由于秸秆茬较高,因此功率消耗较高。旋耕埋草装置的作业过程如图5所示。 图5 旋耕埋草刀辊作业 为了提高功耗检测的精确性,利用可视化编程的方式,将灰色预测模型引入到旋耕埋草机的功耗检测界面中。在进行旋耕埋草机功耗测试软件可视化界面开发时,为了使界面具有很好的可操作性,本研究采用Delphi软件进行窗口的可视化开发,其界面如图6所示。 图6 Delphi软件可视化窗口界面 通过Delphi软件可视化窗口界面(见图7)的开发,在进行旋耕麦草机功耗检测时,可以很好地实现人机可视化交流,使用户不必具备专业的电脑知识便可以对软件进行相关的操作,在操作时,只需要操试实验。 图7 旋耕埋草机功耗测试Delphi界面 在界面中注册好用户名和密码后,便可以通过输入用户名和密码的方式登录到Delphi界面,利用Delphi还可以输出动态曲线,如图8所示。 在应用程序运行时,利用类的Create方法创建对象的方式被称为动态创建方式,创建的对象被称为动态对象。可以利用该功能对旋耕埋草机的功耗曲线进行绘制,旋耕埋草机通过功耗测试得到了如表1所示的检测数据。 图8 动态曲线输出 测试次数转速/r·min-1转矩/N·m功耗/kW1156.219.30.382187.521.20.423156.818.50.374176.317.60.355166.116.20.336154.515.30.317149.314.80.288158.715.20.34 将功耗测试设备调试完毕后,根据调整拖拉机的转速,得到了8组不同转速下的转速、转矩和功耗数据。为了继续研究转速和功耗的关系,功耗转速对应关系的测试结果如图9所示。 图9 功耗转速曲线 通过测试得到的功率范围在0.35~1.25kW之间,通过控制油门手柄,还可以获得逐级增大的转速。所以,在田间试验时可以根据刀辊作业时的实际转速情况,得到近似的刀辊转速因素所需要的水平值,为旋耕埋草装置的优化提供数据性指导。 为了对旋耕埋草机的功耗问题进行优化,设计了一种新的基于Delphi可视化界面的功耗检测系统,并分别设计了数据采集模块、传感器模块、数据分析模块和Delphi可视化显示模块,从而解决了旋耕埋草机作业过程中实际功耗大小不清楚、刀辊作业时运动参数与功耗的关系不明确等问题。将该系统安装在旋耕埋草机上,对其性能进行了检测,并在Delphi可视化界面上对检测结果进行了显示。由于时间和篇幅限制,没有对旋耕埋草机优化后的模型进行详细分析,在后续的研究中,可以采用正交实验的方法,研究不同优化组合形式下旋耕埋草机的作业性能,从而提出可以推广的旋耕埋草机优化设计方案。 [1] 陈胜来,刘谦.离心机吊篮耳轴扭矩测试技术[J].装备环境工程,2013,10(1):102-105. [2] 丁艳,彭卓敏,夏建林.国内典型稻杆还田技术及机具的比较与分析[J].中国农机化,2010(3): 43-46. [3] 郭会军,张建丰,王志林,等.基于LabVIEW和ARM处理器的大型称重式蒸渗仪测控系统[J].农业工程学报,2013,29(16):134-141. [4] 胡德福.应变式扭矩传感器的设计技术[J].船舶工程,2011,33(4):96-99. [5] 李永嘉,宋建农,康小军.双辅稻秆还田旋耕机试验[J].农业机械学报,2013,44(6):45-49. [6] 倪长安,苗全生,刘玉,等.玉米根巷破碎还田装置设计与试验[J].农业机械学报,2008,39(7):68-71. [7] 乔晓东,王晓燕,颜华,等.基于虚拟仪器旳后悬挂农具田间测试系统[J].农业机械学报,2013,44(10): 98-103. [8] 石延平,周庆贵,臧勇.环形差动压磁式非接触动态扭矩传感器的研究与设计[J].中国机械工程,2011, 22(17); 2026-2029. [9] 石延平,臧勇,周庆贵.基于铁基非晶态合金的非接触半套环式扭矩传感器的研究[J].机械工程学报, 2012,48 (12): 13-17. [10] 宋春华,徐光卫.扭矩传感器的发展研宄综述[J].微特电机,2012,40(11): 58-60. [11] 汤跃,黄志攀,汤玲迪,等.基于LabVIEW的离心泉闭环恒压控制特性试验[J].农业机械学报,2013,44(3): 59-63. [12] 喻洪麟,陈薇,何安国.基于环形阵列扭矩传感器的高精度扭矩测量系统设计[J].传感器与微系统,2013,32(7):97-105. [13] 郭艾侠,邹湘军,朱梦思,等.基于探索性分析的荔枝果及结果母枝颜色特征分析与识别[J].农业工程学报,2013,29(4):191-198. [14] 项荣,应义斌,蒋焕煜.田间环境下果蔬采摘快速识别与定位方法研究进展[J].农业机械学报,2013,44(11):208-223. [15] 魏泽鼎,贾俊国,王占永.基于视觉传感器的棉花果实定位方法[J].农机化研究,2012,34(6):66-68,112. [16] 李立君,李昕,高自成,等.基于偏好免疫网络的油茶果采摘机器人图像识别算法[J].农业机械学报, 2012,43(11):209-213. [17] 王辉,毛文华,刘刚,等.基于视觉组合的苹果作业机器人识别与定位[J].农业机械学报,2012,43(12): 165-170. [18] 袁挺,纪超,陈英,等.基于光谱成像技术的温室黄瓜识别方法[J].农业机械学报,2011,42(S1):172-176. [19] 熊俊涛,邹湘军,陈丽娟,等.采摘机械手对扰动荔枝的视觉定位[J].农业工程学报,2012,28(14):36-41. [20] 吕继东,赵德安,姬伟,等.采摘机器人振荡果实动态识别[J].农业机械学报,2012,43(5):173-196. [21] 钱建平,杨信廷,吴晓明,等.自然场景下基于混合颜色空间的成熟期苹果识别方法[J].农业工程学报,2012,28(17):137-142. [22] 顾宝兴,姬长英,王海青,等.智能移动水果采摘机器人设计与试验[J].农业机械学报,2012,43(6):153-160. [23] 王海青,姬长英,顾宝兴,等.基于机器视觉和支持向量机的温室黄瓜识别[J].农业机械学报,2012,43(3): 163-167. [24] 王辉,毛文华,刘刚,等.基于视觉组合的苹果作业机器人识别与定位[J].农业机械学报,2012,43(12): 165-170. [25] 李寒,王库,曹倩,等.基于机器视觉的番茄多目标提取与匹配[J].农业工程学报,2012,28(5):168-172. [26] 李立君,李昕,高自成,等.基于偏好免疫网络的油茶果采摘机器人图像识别算法[J].农业机械学报,2012,43(12):209-213. Research on Power Detection of Rotary Tillage and Grass Machine Based on Delphi Visual Programming Lu Zhou1, Li Jianghua2 (1.School of Electronic Commerce, Baotou Light Industry Vocational Technical College, Baotou 014035, China; 2.College of Information Engineering, Inner Mongolia University of Technology, Hohhot 010051, China) It is an important factor to restrict the development of the machine Rotary tillage and grass machine in working process by greater resistance, especially in heavy clay soil area and the power consumption. Aiming at the problems of high stubble rotary tillage buried grass machine and actual power consumption value is not clear, operation knife Kun motion parameters and the power consumption of the relationship is not clear, according to the basic principle of power consumption detection by Delphi visual programming software, it designed a new rotary submerged grass machine power detection system.The system consists of four modules,including the design of acquisition module,sensor module,data analysis module and Delphi visual display module. After the system installed on the rotary buried grass machine, its performance were detected, and the detection results of speed, torque and power. Through data processing in Delphi interface display, the detection results shows that a rotary buried grass maneuvering force distribution and energy saving research, which provides useful reference data. rotary tillage and grass machine; power detection; Delphi interface; visualization 2016-05-05 内蒙古自治区高等学校科学研究项目(NJZY16476) 陆 洲 (1981-),男,内蒙古包头人,副教授,硕士,(E-mail)lz_nmg@sina.com。 李江华(1972-),男,太原人,副教授,博士。 S222.3 A 1003-188X(2017)08-0048-05

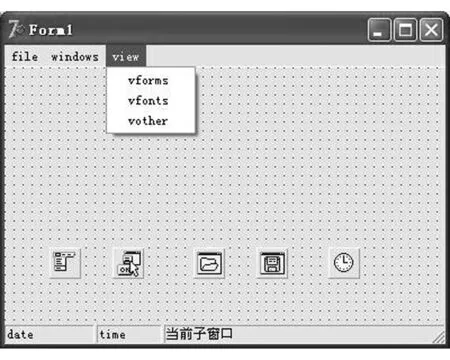
3 可视化界面开发和试验测试



4 结语
