精密播种制钵机的机构设计及计算机辅助分析
2017-12-16张丽娟
张丽娟
(内蒙古化工职业学院 计算机与信息工程系,呼和浩特 010070)
精密播种制钵机的机构设计及计算机辅助分析
张丽娟
(内蒙古化工职业学院 计算机与信息工程系,呼和浩特 010070)
目前,我国农业育苗播种中,所采用的播种制钵机还属于机械化范畴,不具有自动化水平,不能有效实现精密播种需求。为此,分析精密播种制钵机优化设计的需求,并结合Pro/Engineer软件辅助分析,优化了设计参数。结果表明:设计出的精密播种制钵机的机械结构简单、性价比高,降低了使用中钵体的破损率(降低12.0%),提升制钵机工作可靠性(提升20.0%),具有较大的经济效益。基于计算机辅助分析方法,优化设计精密播种制钵机的机构,可提升精密播种制钵机应用性能。
制钵机;计算机辅助;精密播种;机械结构
0 引言
我国当前农业生产中,多数已在播种上采用了钵体育苗;然而,在钵体制造方面,还采用机械化的单独制钵设计,不能自动化制造钵体,以满足流水线式钵体育苗作业,降低了工作效率[1-3]。优化设计精密播种制钵机的机构,有助于克服制钵机育苗的生产规模较小的不足,提升钵机育苗生产效益,可以促进我国钵机育苗种植业的有序发展。
1 我国制钵机技术发展现状
我国当前的精密播种中,还在应用简塑秧盘育苗设备进行育苗,降低了育苗质量,阻碍了机械化、现代化育苗的发展步伐。同时,采用单独制钵再播种的育苗方式,不利于满足实际精密播种育苗的自动流水线作业需求[4]。而且,在当前的制钵机作业中,对于整个制钵机育苗环节,还需要由人工参与完成,不利于提升制钵机机械的自动化水平[5]。同时,现有的制钵机结构也较为复杂,不可以连续作业、劳动强度大,实际的作业效率也低,无形中也增加了精密播种育苗的成本[6-9]。为此,亟待应用计算机辅助技术,优化设计制钵机机构(见图1),以实现农业精密播种,达到自动化精密育苗的要求。
2 精密播种制钵机的机构
本次设计的精密播种制钵机机构,如图2所示。

1.钵模 2.导柱 3.支撑腿 4.冲头 5.机架 6.手柄

1.机架 2.开合式制钵模体 3.T形杆 4.机体 5.泥斗 6.控制杆 7.冲头 8.短连杆 9.长连杆 10.飞轮 11.传动系统
工作原理:制钵机的成型腔轴线放置在与地面平行的方向,确保在成型腔内冲压头可以做有规律的直线运动,并可将成型腔中的土壤压缩,生产精密播种钵体。
3 精密播种制钵机
3.1 设计需求
我国农业发展中,目前多是应用穴盘、纸筒制钵来进行种植,并结合人工喂入式进行育苗移栽。这种作业投资大,且移栽的效率较低,难以满足大面积作物(玉米、棉花)育苗种植需要。为适应大面积精密种植中对于制钵机的需要,根据目前农村劳动力水平,结合传统制钵育苗的优点,优化设计了制钵机机构。在精密播种制钵机设计中,应用计算机辅助分析方法及仿真辅助软件。Pro/Engineer可用于模具、产品设计,可以将看到的东西都画出来[10-13],可以应用该软件来优化制钵机机构设计参数,满足自动化制钵的需求,以便可以解决短时间内劳动力不足的情况,增加其实用性[14]。同时,设计的制钵机,应能够在实际工作过程中,有效避免对作物种子形成机械性的损伤,为种子的发芽创造良好的生态成长环境。精密播种制钵机机构设计中,确保可按育苗位置投出钵体[15],节省移取钵体的时间与劳力,提升钵体强度均匀性,满足实际应用需求。
3.2 制钵机的具体作业流程
本设计的精密播种制钵机在实际中的作业流程,如图3所示。

图3 制钵机的作业流程
1)将已拌好的营养土放在搅拌箱之内,充分地将精密播种育苗所需的营养基质拌匀;将营养物基质填入到模孔中,进行刮平操作。此刻,在搅拌箱中的搅拌叉将会发挥作用,应用推杆来填料,同时它也起到破坏营养土的“安息状态”的作用,其在搅拌箱内作连续回转运动。
2)在制钵机转盘上,确保至少有6个模孔数[16]。转盘和模孔作间歇的转动。由控制系统控制回转速度及各工序能够自由的转移。
3)对于冲出部分,为确保制钵机的两冲头能够作直线式的往复运动,可在钵体的模孔中,把营养土壤挤压成型,使其能够冲出钵体。同时,根据钵体的尺寸、土壤的压缩比及所选曲柄滑块机构的杆长关系,确定工作时序。
4)在钵体的成型和冲出过程之间要有播种和覆土机构。该机构由棉花播种机的播种机构演变而来,是由同步带带动机构转动,同时取一定量的种子和土壤由导管导入钵体,完成播种和覆土。
5)两冲头做直线往复运动。当转盘静止时,由冲头冲模而脱离模孔,再回复到冲压位置,完成一次冲压,同时播种轮转一周完成一次播种和覆土;周而复始。
3.3 参数优化
1)辅助设计压钵装置。压钵装置是一个曲柄的滑块机构,在制钵机作业过程中,由飞轮的圆周运动带动制钵机的冲头,做水平轴向的直线运动,根据在机体内冲头的位置变化,实现钵体充土与播种压实的作业。应用计算机Pro/Engineer辅助分析压钵装置,优化压钵装置的设计结构,如图4所示。

图4 压钵
其能够将精密播种所需要的营养土,根据一定的比例,置于钵体泥斗之内,在开启电机之后,可通过机器中各传动系统去带动飞轮作业;此时飞轮将会因长连杆的作用,使冲头向后运动,营养土在泥斗中会由于重力作用落入到钵体之中。
2)辅助设计钵体的成型装置。在制钵机中,优化设计其机械结构中的钵体成型装置,发挥该结构(见图5)应用优势。在该结构中,其前方往往会有一个弹簧,在控制杆作用下顶端零件也会做向上的运动,还可以通过T形杆,打开钵体的模腔。
具体制钵作业中,随着飞轮转动,冲头完成充土作业后,通过该装置就可以将营养土在钵体中压制成型。
3)辅助设计多杆控制的装置,如制钵机机构优化设计中,其多杆控制装置结构,如图6所示。由于该装置就是一个摇杆滑块,可以确保冲头前后运动,短连杆主要是控制杆上下摆动。

图5 钵体成型
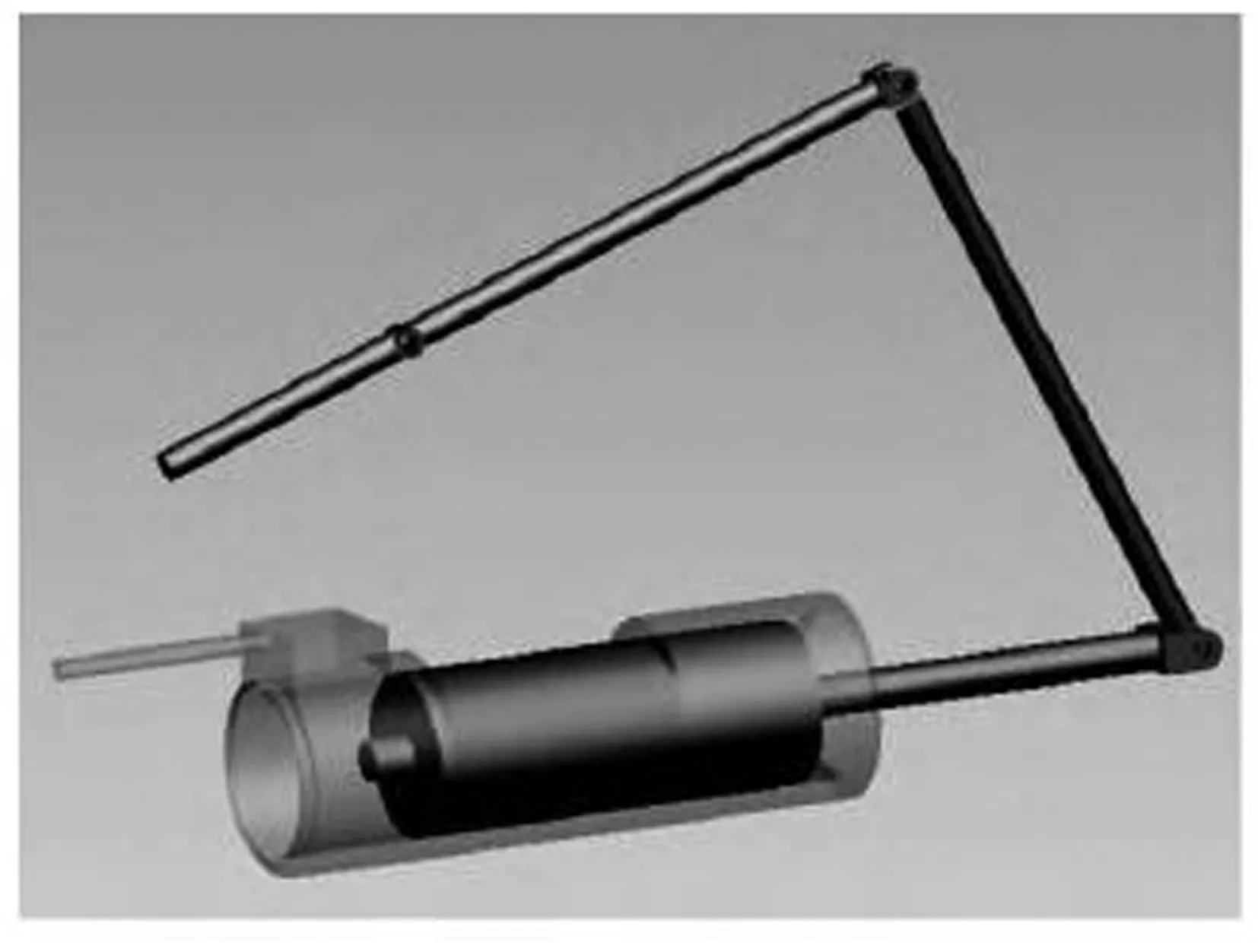
图6 多杆控制
在制钵机中,由于钵体的泥斗下方与制钵开合模体之间存在一段距离,且育苗使用的营养土自身也具有一定粘性,为确保制钵机中制钵模体的营养土不漏出,可通过多杆控制装置控制。其在弹簧力作用下使制钵模体随控制杆回退,确保制钵模体可以提前在营养土到达前闭合,确保营养钵不漏模及营养钵顺利脱模。
3.4 计算机虚拟分析
基于计算机技术中的Pro/Engineer软件,仿真制成虚拟的制钵机零部件模型,在建模之后,调用Pro/Engineer中的装配模块,根据制钵机零件进行装配,进行运动学及结构优化方面的分析,以优化制钵机机构的设计。
电动机功率选择:模孔的转盘中,均匀地分布着6个孔,根据每小时制钵机的生产定额,则实际模孔转盘转速为
n偏=6n转盘=50r/min
设置搅拌器功率参数:在制钵机中,由于搅拌器的转速是较低的,因此功率消耗达到P搅拌=0.27kW。
制钵机中的冲头功率,由式P=kzn得
冲出冲头所消耗的功率为
当转动模孔转盘时,需要去克服滑轴V和转盘间产生的滑动摩擦。基于转盘、机架摩擦所消耗功率为P转盘=0.08kW。
总功率中,传动系统总机械效率η总为0.85,则电动机的功率至少应为
电动机主要技术参数如下:
型号:Y90S-4
额定功率/kW:1.1
满载转速/r·min-1:1 400
质量/kg:22
外形尺寸L×(AB/2+AD)+HD/mm×mm×mm:310×245×190
中心高H/mm:90
安装尺寸A×B/mm:140×100
平键尺寸F×G/mm×mm:8×20
1)轴转速参数。
由《机械设计师手册》知:η直齿=0.97,η锥齿=0.94,η轴承=0.99(均取8级精度),则转盘所需功率为P转盘=0.08kW。则
轴V所需功率为
轴Ⅳ所需功率为
轴III所需功率(设偏心轮机构效率η偏=0.9)
轴Ⅱ所需功率为
轴Ⅰ所需功率为
2)可依据制钵机的结构特点,结合计算机辅助仿真,有效分析出制钵机各零部件的运动关系,并装配出制钵机,如图7所示。
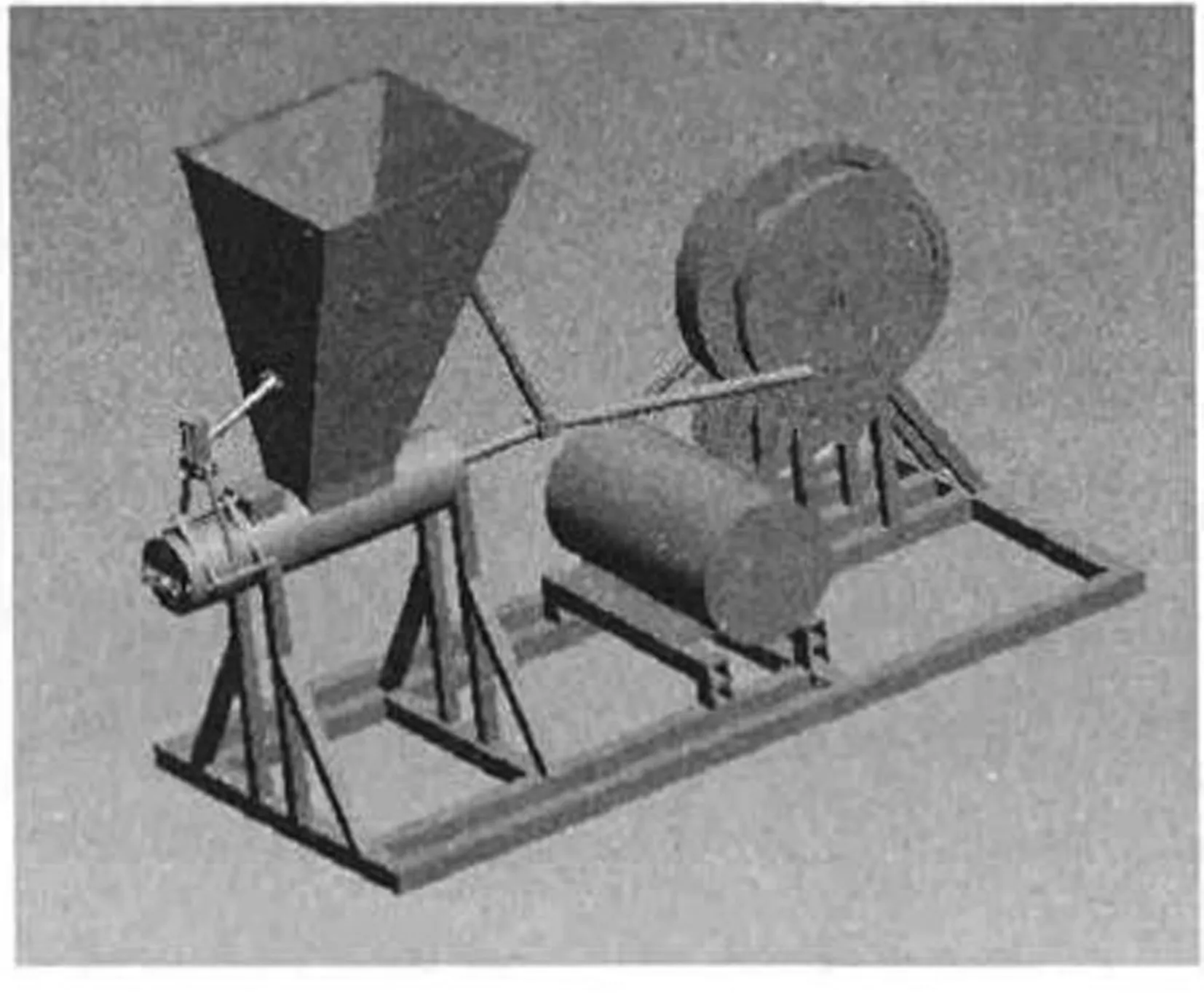
图7 精密播种制钵机样机机构
基于计算机辅助仿真分析,拟采用卧式制钵方案,可以有效减少机器的竖向尺寸;并且,在制钵机中,应用槽钢焊接成机架,简化机器的结构;对于制钵机的动力系统,可以应用220V单相交流去驱动机器电机。其整机竖向尺寸小,机械结构简单,性价比高。
4 效益分析
在本次制钵机机构设计中,基于计算机Pro/Engineer仿真软件优化设计参数,经实践应用分析可知:设计出的精密播种制钵机的机械结构简单,而且性价比高,可降低使用中钵体的破损率(降低12.0%),提升制钵机工作可靠性(提升20.0%),具有较好应用前景。
5 结论
综上所述,优化设计精密播种制钵机的机构,经计算机辅助优化具体的机构设计参数,不仅可以实现精量播种,也可节约育苗播种中的种子用量,满足机械化生产的要求,发挥积极应用价值,实现自动化,在实际中推广应用具有发展前景。
[1] 丁时锋,李清香,贾寓词,等.基于Pro/Engineer的多杆卧式制钵机设计[J].中国农机化学报,2014,35(1):138-140.
[2] 谭利明,闸建文.棉花机械化自动制钵机的设计[J].农机化研究,2011,33(5):126-129.
[3] 卢志达.新型自动制钵机自动取土机构的研究与设计[D].杭州:浙江理工大学,2013.
[4] 张海龙,董德军,赵荔娜,等.ZB-3000型育苗制钵机冲压系统的设计[J].农村牧区机械化,2013(4):16-18.
[5] 李可,祁文博,张海龙,等.ZB-3000型育苗制钵机传动系统的设计[J].农村牧区机械化,2011(4):17-18.
[6] 李可.ZB-3000型育苗制钵机的构造及使用保养与故障排除[J].农村牧区机械化,2012(3):41-42.
[7] 赵荔娜.机械化育苗制钵机的研究[J].农村牧区机械化,2010(5):19-20.
[8] 尹业宏,吴星成,安宁,等.滚筒式营养钵体制钵机研究设计[J].农机化研究,2012,34(1):142-145.
[9] 谢俊花,程改青,张飞,等.营养钵装料机设计[J].安徽农业科学,2008,36(12):5235-5236,5239.
[10] 赵荔娜.ZB-3000型育苗制钵机的设计[J].农村牧区机械化,2012(3):13-14.
[11] 易继炎.棉花制钵机的正确使用与故障排除[J].湖南农机,2012(4):31.
[12] 叶秉良,刘安,俞高红,等.蔬菜钵苗移栽机取苗机构人机交互参数优化与试验[J].农业机械学报,2013,44(2):57-62.
[13] 祁文博.关于ZB-3000型育苗制钵机输送带跑偏问题的研究[J].农村牧区机械化,2013(2):42-43.
[14] 倪有亮,金诚谦,刘基,等.全自动移栽机取送苗系统的设计与试验[J].农业工程学报,2015(23):10-19.
[15] 王林生,马瑛,汪小志,等.基于模糊控制的播种机精密单体播深控制仿真研究[J].农机化研究,2016,38(1):86-89.
[16] 张小龙,徐烈志,曹成茂,等.基于CATIA与 ADAMS 的精密播种机联合仿真[J].农机化研究, 2013,35(5):16-19.
Computer Aided Optimization Design of the Mechanical Structure of Precision Seeding Machine
Zhang Lijuan
(Inner Mongolia Vocational College of Chemical Engineering of Computer and Information Engineering,Hohhot 010070,China)
The purpose of this paper is to study the mechanism design and application of the computer aided analysis of precision seeding machine. For in our country when the agricultural seeding, the seeding machine for making pots also belong to the category of mechanization, automation level, can not effectively achieve precision seeding demands, this analysis precision seeding bowl making machine optimization design demand, combined with computer software Pro / Engineer, and assistant analysis and optimization of design parameters. Results confirmed, not only design the precision seeding of bowl making machine mechanical structure is simple, and the price is high, reduce use of the bowl body breakage rate, reduce 12.0%, to improve the reliability of the work bowl making machine, enhance the 20.0%, play a positive effect in application. The conclusion shows that, based on the computer aided analysis method, the optimization design of the mechanism of the precision seeding machine, exert positive influence and improve the application performance of precision seeding machine.
bowl making machine; computer assisted; precision seeding; mechanical structure
2016-04-23
内蒙古自治区教育厅自筹经费科研课题(NJZC16413)
张丽娟(1981-),女,内蒙古赤峰人,讲师,硕士,(E-mail)zuzhigongzuo@163.com。
S223.1
A
1003-188X(2017)05-0171-05
