全自走牛舍清洁机器人的设计
2017-12-16杨存志尧李慧李源源
杨存志,贺 刚,尧李慧,李源源
(1.黑龙江省农业机械工程科学研究院,哈尔滨 150081;2.中国农业机械化科学研究院 呼和浩特分院,呼和哈特 010020;3.黑龙江八一农垦大学,黑龙江 大庆 163319)
全自走牛舍清洁机器人的设计
杨存志1,贺 刚2,尧李慧3,李源源1
(1.黑龙江省农业机械工程科学研究院,哈尔滨 150081;2.中国农业机械化科学研究院 呼和浩特分院,呼和哈特 010020;3.黑龙江八一农垦大学,黑龙江 大庆 163319)
为了提高规模化牛舍的清洁工作效率,减轻工作人员劳动强度,改善饲养动物的福利状况,研制了远程控制自走式智能清洁机器人。该机器人适用于各种漏缝地板,主要通过超声波测距和陀螺仪定位方法精确检测推进的距离和方向,控制系统依据处理结果发出信号,控制机器人按规划路径实现智能避障等动作。它具有运行平稳、静音安全、牛舍中无人化全天候工作、自动充电充水等功能,是现代化养殖场清理粪污装备的发展趋势。
清洁机器人;自走式;漏缝地板;牛舍
0 引言
养殖业在推动经济发展过程中起到了重要的推手作用,而奶牛养殖又是其中重要组成部分。随着养殖集约化的发展,牛场粪污的收集处理成为严重的问题,其主要表现在以下3个方面:①占用大量场区土地;②滋生蚊蝇,产生恶臭;③污染空气、土壤和水源。
奶牛场粪污的主要来源之一是牛舍,粪便的积累是潜在的污染源,奶牛只有不用走在粪便中才能保持干净,减少奶牛肢蹄病和乳房炎的发病率。荷兰Wageningen大学研究结果表明:每5头牛就有1头跛足,牛蹄病成为导致奶牛过早淘汰的第三大原因(继乳房炎、繁殖疾病之后)。牛舍地面应始终保持清洁、干燥和舒适,牛在牛舍中活动散步,牛蹄保持干净,无论躺卧在牛床还是过道,牛身不会沾染过多的粪污,从而保证乳房干净,预防了乳房炎和其他疾病的发生。清洁的牛场减少了药费的支出,延长了奶牛的使用寿命,降低了奶牛的淘汰率,提高了奶牛产奶性能,从而增加了奶牛场的经济效益。
1 粪便清理方法
目前,粪便清理主要分为人工清理与机械两种清理方式。人工清理方式优点是简单、灵活,缺点是工人劳动强度大、效率低,人力成本不断增加,且仅适用于小规模养殖。
机械作业形式分为传统机械清理方式和智能机械清理方式。传统机械清理方式包括铲车清理、水冲清理以及电动刮板清理。
1)铲车清理为半机械化清粪方式,比人工清理方式效率高;但缺点是工作噪音大,易对牛造成伤害和惊吓,且工作时间有限,很难保证牛舍的清洁,运行成本高。
2)水冲清理需要的人力少、劳动强度小、劳动效率高,能频繁冲洗,从而保证牛舍的清洁和奶牛的卫生。这种工艺需要充足的水量、配套的污水处理系统、水位提升装置、合适的牛舍坡度,以及输送污粪用的泵和管路等。该工艺技术简单,但污水处理部分基建投资及动力消耗很高。
3)电动刮板清理能做到每天24h清粪,时刻保证牛舍的清洁。电动刮板主要由主机、电机、减速机、牵引绳及刮板等组成。在工作过程中,刮板充满甬道,进行刮粪工作。该种清理机械操作简便,工作安全可靠,其刮板高度及运行速度适中,基本没有噪音,运行、维护成本低;但可能会对牛群的行走、饲喂、休息造成一定的影响。电动刮板清理方式是现在大部分规模化奶牛场在采用无缝地板时最经济有效的手段。
4)智能机械清理方式主要利用安装在全自走装备上的刮粪板进行清粪,此种机械适用于各种漏缝地板,主要通过各种定位与测距等先进技术与设备进行导航,控制系统依据处理结果发出控制信号,控制清粪工作部件进行工作。这种清粪方式具有良好的工作性能,即能高效快速地清除粪便,又不会惊吓与伤害到奶牛。国外公司已经研制出数种自走式智能化清洁机器人,具有代表性的如瑞典利拉伐、荷兰JOZ及荷兰莱利等,其产品已应用在少部分奶牛场、养猪场。
为了填补国内空白,迫切需要开发一种远程控制自走式智能化牛舍清洁机器人,它能够自动化、全天候的工作,并且行走速度适中,没有噪音,对牛群的行走、饲喂、休息不造成任何影响和伤害,完全替代传统繁重的人工清洁工作。
2 清洁机器人设计参数计算
清洁机器人设计为240头泌乳牛牛舍工作,清扫一次时间为2h。
1)作业面积。图1为240头泌乳牛牛舍示意图,箭头围成部分是清粪区域,由此可知清洁作业面积约为900m2。

图1 240头泌乳牛牛舍示意图
2)行走速度。清洁机器人清扫牛舍一次时间设定为120min,清洁刮板宽度设定为0.8m,则机器人行走速度为
V×0.8m×120min=900m2
V=9.375m/min
由此确定行走速度为V=9~18m/min。
3)电机功率。由初步结构设计确定设备总重质约为340kg,摩擦因数与清洁阻力合计0.05,行走速度按V=18m/min。
P=FV=50W
选择伺服电机2台,P=120W,n=3 000r/min,额定电流10A,电压24V。
4)总减速比。由初步结构设计确定行走轮直径D=250mm,则行走轮转速为
n=v/πD=18/0.25π=23r/min
其中,i=3000/23=130。
最终确定总减速比i=120,电机减速器i1=40,链轮减速i2=3。
5)电瓶容量。按照2台电机额定功率计算,总功率为240W,则
I=P/U=240/24=10A
考虑电瓶的耐用性和频繁充放电的特点,选择汽车用电瓶,可以一次连续工作7.5h。选择电瓶参数为电压12V,容量75Ah。
3 清洁机器人结构设计
自走式牛舍清洁机器人主要由机械结构、控制系统、充电装置及充水装置等组成,采用嵌入式ARM作为自走式牛舍清洁机器人核心控制器,进行智能避障、按照规划的路径行驶,实现全天候智能清粪;采用超声波测距和陀螺仪定位方法精确检测推进的距离和方向,并具有智能避障功能,避免牛与机器人发生危险;实现低电量报警自动充电功能,水箱液位检测及自动充水功能。
基于以上设计要求,牛舍清洁机器人总体结构设计如图2所示。

1.驱动轮总成 2.充电触板 3.配重体 4.水箱 5.补水开关装置 6.控制系统 7.充电电瓶 8.防撞轮 9.超声波传感器 10.喷洒装置 11.刮粪板
1)结构设计说明。由图2可知,驱动系统设计为左右2个独立的驱动轮总成,可以完成直行、左右转向及后退等动作。
防撞轮绕轴心旋转,当侧面墙体与防撞轮接触,轮的旋转可以减少摩擦力;当防撞轮正面碰到牛腿或硬物,由控制系统判断是否启动避障程序,起到保护作用。电瓶为整个设备提供直流电力,包括电机、水泵、控制系统、传感器和开关等。
当低水位液位传感器发出信号需要补水时,清洁机器人行驶到加水站,补水开关装置会打开活门进行加水;当高水位液位传感器发出信号水箱已满,加水站阀门关闭后,补水开关装置关闭活门,清洁机器人驶离加水站继续清扫。
2)设备质量配置计算。清洁机器人质量配置图如图3所示。

图3 清洁机器人质量配置图
由图2、图3可知:清洁机器人工作时,设计重心在驱动轮中心线靠前48mm处,经计算刮粪板承重38.3kg,起到第3点支撑作用,保证了设备的稳定性。设刮粪板处支撑力为N1,驱动轮处支撑力为N2,则
N1=340×48/426=38.3kg
N2=301.7kg
3)喷洒装置设计计算。喷洒装置如图4所示。

1.水箱 2.补水开关装置 3.过滤器 4.水泵 5.喷头
喷洒装置包括喷头喷量、喷头数量、水箱容积等参数的确定和结构设计。
喷洒装置设计2个0.25L/min的喷头,喷雾直径80cm,按照连续工作1h计算,需要水箱容积30L(连续工作2h需补水1次)。水泵选型:电压12V,电流 1.6~2A。最大压力:0.6MPa ,最大流量4L/min。
4)自动充电装置的设计。自动充电装置一般安装在墙壁上,其安装高度与清洁机器人的充电触板相匹配。如图5所示,充电装置主要包括2个正负极触头、充电器、变压器及壳体等结构。
4 清洁机器人的运动学分析
以几何中心和质心不重合的约束非理想两轮驱动的清洁机器人为研究对象,其简化模型如图6所示。
简化后的清洁机器人由两个同轴的驱动后轮和一个刮板组成,三点确定一个平面,刮板就起到万向从动轮转向的作用。其中,两个后轮分别由两个独立的伺服电机驱动以提供所需的力矩;前方刮板看作是支撑轮,在后方两个驱动轮的作用下可以沿目标方向移动。(XM,YM)为清洁机器人质心M在XOY坐标系中的坐标;θ为清洁机器人运动的方向转角,即其运动方向与世界坐标系X轴的夹角;C为清洁机器人两个驱动轮的几何中心,(XC,YC)为清洁机器人的几何中心C在XOY坐标系中的坐标;r为驱动轮半径;2b为两驱动轮之间的距离;M、C之间的距离为d。

图5 自动充电装置
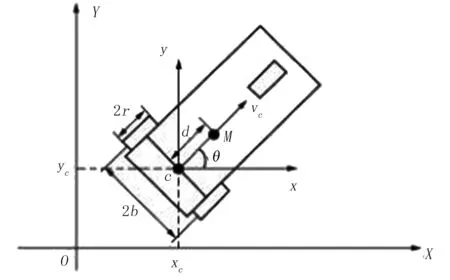
图6 清洁机器人的简化结构示意图
设清洁机器人平台质心M的速度为VM,垂直于平面的轮轴,则两个坐标轴上的分量为
(1)
(2)
由图9可知,清洁机器人质心M和几何中心C有如下位置关系,有
xC=xM-dcosθ
(3)
yC=yM-dsinθ
(4)
对式(3)和式(4)求导可得速度关系为
(5)
(6)
将式(1)、式(2)分别代入式(5)和式(6),并整理可得几何中心C的速度关系为
(7)

(8)
(9)
当不考虑驱动轮的滑动时,求得清洁机器人的运动学方程为
(10)
由于该清洁机器人的质心M和几何中心C不重合,在驱动轮满足无滑动、纯滚动的条件下,清洁机器人所受的非完整约束为
(11)
将式(10)写成下面的形式,即




V(t)=[v,ω]T
其中,v表示几何中心C的线速度;ω表示几何中心C的角速度。则清洁机器人的运动学方程可写为

(12)
由此运动学方程,可知清洁机器人在坐标系的任意位置坐标,可据以进行控制软件的计算,精确控制机器人的行走轨迹。
5 不同地面摩擦因数的仿真分析
清洁机器人在地面上运动,整个系统与外界作用的部分,分别是车轮与刮板。系统在外界摩擦作用下进行工作,需要考虑外界因素对系统的各项指标的影响,针对一系列影响提出具体的举措和结构的改进优化。
首先针对不同摩擦因数清洁机器人在直行与转向两种情况下的运动情况,主要分析其运动速度与加速度和摩擦因数的关系。为此,在直线与转向两种情况下分别选用摩擦因数f=0.2、f=0.06与f=0.01进行对比仿真。
1)本仿真是以相同的电机输出转矩在轮胎与地面之间分别以3种不同摩擦因数接触面驱动系统直行,是在清洁机器人运动速度为350mm/s的情况下进行的。这里取摩擦因数f=0.2、f=0.06与f=0.01,系统自重340kg,重力参数g=9.8N/kg。以此为参数条件进行仿真得到速度对比曲线如图7所示,加速度对比曲线如图8所示。
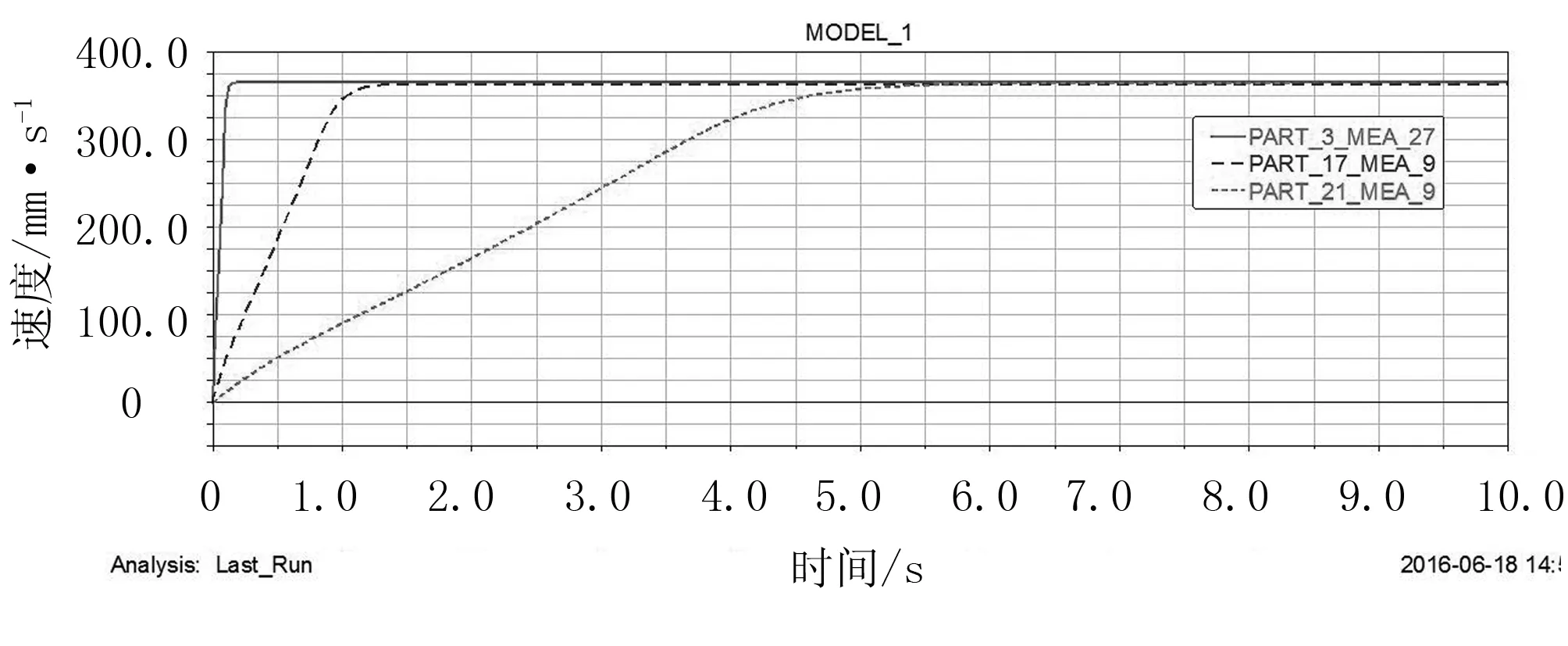
图7 清洁机器人的速度对比曲线

图8 清洁机器人的加速度对比曲线
由图7可知:系统在相同驱动条件下,在1.5s前,摩擦因数为f=0.2与f=0.06的条件下系统能够达到规定要求的350mm/s的速度,而摩擦因数为f=0.01的条件下需要5.5s能达到规定要求速度。由图8可知:在0~0.2s时,摩擦因数为f=0.2情况下加速度的幅值最大,f=0.06与f=0.01的幅值依次递减。在1~10s时,摩擦因数为f=0.2与f=0.06情况下的系统加速度保持平稳,而摩擦因数为f=0.01情况下仍然有不同程度的加速度波动。经过对比发现,系统在驱动力一定的情况下,随着摩擦因数的增大,系统的速度增加的更快,达到平稳运动的时间越短。由此可得出,摩擦因数对系统直行有一定的运动性能影响。
2)本仿真是以电机输出转矩在轮胎与地面之间分别以3种不同摩擦因数接触面驱动系统转向,这是在左右轮以相同幅值轮速但转速相反的情况下进行的。这里取摩擦因数f=0.2、f=0.06与f=0.01,系统自重340kg,重力参数g=9.8N/kg。以此为参数条件进行仿真得到角速度对比曲线如图10所示,角加速度对比曲线如图10所示。

图9 清洁机器人的角速度对比曲线
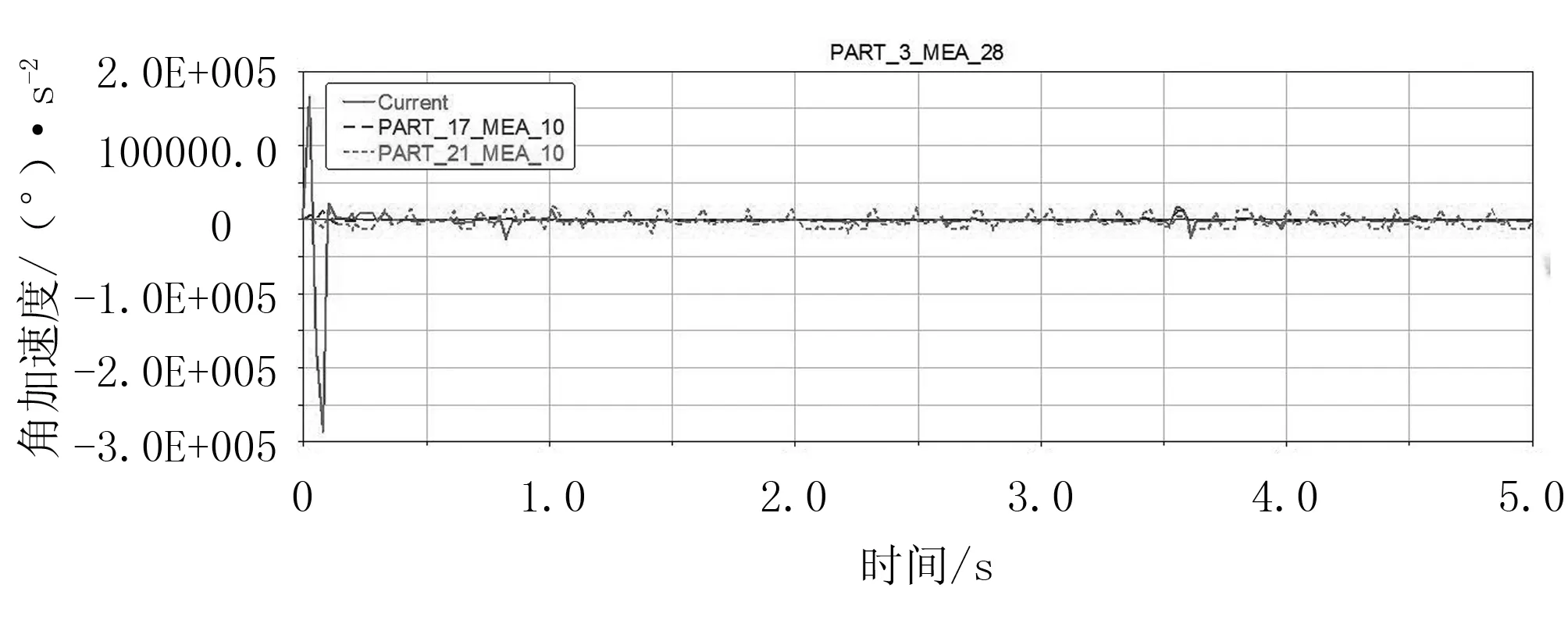
图10 清洁机器人的角加速度对比曲线
由图9可知:系统在开始转向时,摩擦因数为f=0.2情况下角速度的变化程度最大,f=0.06与f=0.01的变化程度依次递减。由图10可知,摩擦因数为f=0.2与f=0.01的条件下系统的角加速度有不同程度的波动,而摩擦因数f=0.06时,系统角加速度稳定。由此可得出, 摩擦因数对系统转向有一定的运动性能影响。综上所述,摩擦因数对系统的直行与转向运动性能有一定的影响。所以,在选择地面时,应该选取摩擦因数恰当的地面。
6 结论
全自走牛舍清洁机器人的设计成功,满足了其运行平稳、牛舍中无人化全天候工作、自动充电充水等功能,并通过超声波测距和陀螺仪定位方法精确检测推进的距离和方向,将牛舍通道中的粪污清扫进漏缝中;通过控制系统和软件的路径规划,能够满足不同环境下奶牛场、养猪场的清洁要求。
[1] 高学山,徐殿国.全方位地面移动清扫机器人[J].机械工程学报,2008,44(3):228-233.
[2] 石为人,周学益.室内清洁机器人避障路径规划研究[J].计算机应用,2007(6):378-379.
[3] 邹先枚,胡朝阳,王光.奶牛场清粪工艺及相关设备概述[J].基地建设,2008(7):5.
[4] 曾岑,陈进,蒋玉杰.智能型室内清洁机器人的研究和发展探析[J].现状.趋势.战略,2008(10):63-67.
Design of Self-propelled Barn Cleaning Robot
Yang Cunzhi1, He Gang2, Yao Lihui3, Li Yuanyuan1
(1.Scientific Research Institute of Agricultural Mechanical Engineering in Heilongjiang, Harbin 150081,China; 2.Hohhot Branch of Chinese Acacdency of Agricultural Mechanical Science, Hohhot 010020,China; 3.Heilongjiang Bayi Agricultural University, Daqing 163319,China)
In order to improve the cleaning work efficiency of the scale of cow and pig house, reduce the labor intensity of workers, improving the breeding of animal welfare, we developed the remote control and intelligent cleaning robot.The robots are suitable for various slatted floor, mainly through the accurate detection of ultrasonic ranging and gyroscope locating method to promote the distance and direction, controlling system based on processing the signals, control the robot to work of path planning and intelligent obstacle avoidance action. It has a smooth operation, safe and silent, barn without humanized working around the clock, automatic charging water filled function, is modern farms cleaning sewage equipment development trend.
cleaning robot; self-propelled; slatted floor;cowshed
2016-07-20
“十二五”国家科技支撑计划项目(2014BAD08B10)
杨存志(1969-),男,浙江宁波人,高级工程师,(E-mail)yangcunzhi1969@163.com.cn。
S815.4;TP242
A
1003-188X(2017)05-0090-05
