近景大视场角分区域标定方法研究
2017-12-15,,,
,, ,
(中国飞行试验研究院,西安 710089)
近景大视场角分区域标定方法研究
刘晓磊,张兴国,吴衡,侯海啸
(中国飞行试验研究院,西安710089)
针对飞行试验测量视场大相机标定精度低的问题,提出一种高精度CCD相机分区域标定方法;该方法首先通过将标靶均匀布置在摄像机视场内,使得标靶尽可能均匀错落地充满整个视场范围,再结合人眼判读的方式求解靶标的像面位置,最终与全站仪三维坐标形成精确的空间标定点集;接着,将像平面按横向方向等间距分割成N个区域,并结合后方交会的方法分别对每个子区域进行相机参数的计算;实验结果表明:经过分区域标定,相机采集点的总误差比单区域标定法降低了4%(N=3);算法可实现指定区域的相机参数计算,基本满足中高等精度的工业测量要求;所本文研究可应用于位置相对固定不变的工业视觉测量,特别是大工件测量领域。
近景摄影测量;后方交会;前方交会;分区域;相机标定
0 引言
近年来,随着计算机技术以及图像处理技术的不断发展,基于计算机视觉的工业测量以其快速性、非接触、精度高等优点不断应用在航天航空工业、汽车制造等诸多领域。但是随着相关领域对物体尺寸、位移等的测量精度要求越来越高,这就需要提高视觉测量的精度。视觉测量的第一步是相机标定,相机标定的精度将直接影响整套测量系统的最终测量精度。由于传统的相机标定方法是针对整个相机视场进行标定,即利用布置在整个视场范围内的固定标志点,通过相关标定方法计算出相机的参数,这样的标定方法可以将整个视场的误差进行平均化从而可以测量整个视场内的物体。然而某些特殊测量场景,仅仅需要测量相机视场内一个相对固定区域内的物体的尺寸、位置等信息,这样利用传统的整个视场内标定物进行相机标定的方法势必会降低该物体的测量精度,因此研究分区域标定方法具有十分重要的意义。
目前相机标定方法大致可分为三类:基于场景信息的自标定方法、基于标定参照物的传统标定方法以及基于像机已知运动的主动视觉标定方法。其中传统标定方法按使用标定物维数不同分为一维靶标、二维靶标和三维靶标。其中三维标定物制作复杂,而二维标定物的精度不易保证,且采集的标定点不能充满整个像平面,从而会影响整个标定精度。杨博文等提出一种面向大视场视觉测量的摄像机标定技术,其通过在整个视场范围内精确移动红外发光二极管靶标的方式构成虚拟立体靶标标定场,然后相机在每个方位上求解一组相机内外参数,最后将不同方位求得的参数进行优化,完成整个视场的标定,该方法克服了大型靶标制造困难的缺点,且标定精度高于近距离标定方法,但是其对靶标移动位置要求较高,否则无法控制标定精度[3]。刘书桂等针对近景摄影测量中相机标定精度低的问题提出一种移动光靶标的分区域相机标定方法,该方法依然通过在相机视场内精确移动发光二极管靶标的方式构建立体标定场,然后将像平面按照圆环对称的方式将标定场分为N个区域,最后通过改进的TSAI算法对每个区域进行标定,该方法在一定程度上提高了相机标定精度,但是其对靶标的位置要求较高,且在大视场下很难做到圆环对称分布[2]。国外NASA曾提出基于立体摄影原理的风洞变形测量方法,该方法通过对编码标志牌的方式进行整个视场的相机标定,标定过程中靶标位置固定,相机为围绕靶标进行转动[4]。
在飞行测试的某些特殊场景下,我们仅仅需要测量固定位置物体的位置尺寸信息,利用传统的整体标定方法进行测量便会降低测量精度。针对这些特殊测量场景,本文利用固定式靶标与全站仪结合的方法在整个测量视场内将靶标均匀固定,同时利用全站仪和待标定相机分别获取每一靶标的空间位置坐标和像点坐标;接着利用本文提出的相机标定算法计算出该相机的一系列参数。
1 相机标定原理
图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定。
摄像机成像模型本质上是一个三维空间到二维像面的转换,理想的相机成像模型为针孔模型,也就是中心透视投影模型,针孔模型示意图见图1。
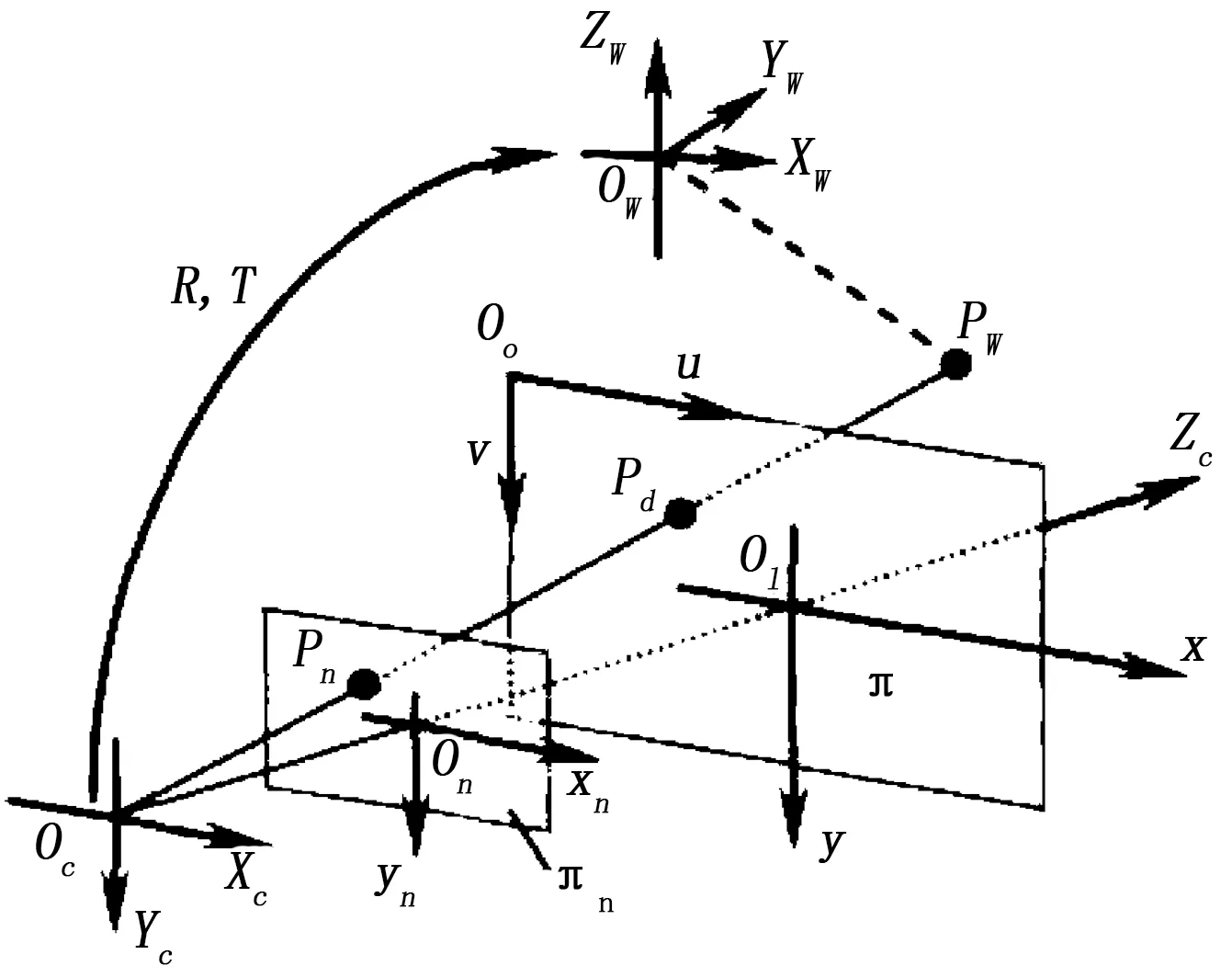
图1 针孔摄像机模型示意图
实际的成像系统并不是理想的透视投影(小孔成像模型),相机在生产过程中由于制作工艺的限制会不可避免的出现畸变,加之安装误差等,使得像点、物点和主点不在同一直线上,从而使理论像点与实际像点形成偏差。如图2所示。

图2 相机畸变原理图
因此相机标定的目的就是通过一些已知位置的物点经过相机成像在像面上的像点构成对应关系,通过求解对应关系从而解算出相机的参数。一般相机参数分为内参数与外参数,内参数包括相机的焦距f,像主点(x0,y0),以及径向畸变和切向畸变;外参数即摄影瞬间相机在世界坐标系下的位置和姿态,分别为Xs,Ys,Zs,ω,φ,κ,其中Xs,Ys,Zs代表摄影中心在地面坐标系中的坐标,ω,φ,κ代表摄影光束空间姿态的3个角元素。由于本文所选用的镜头畸变较小,因此本文只引入一次径向畸变为k1,引入畸变参数之后即可建立像点与物点的对应关系,如式(1)所示:
(1)
将(1)式看成外方位元素的函数时,方程(1)是非线性的。将像点坐标视为观测值,将(1)式线性化并展开可得误差方程的矩阵形式为:
(2)
b11=(x-x0)r2
b21=(y-y0)r2

(3)
若已知n个控制点,可列出2n个方程式,写成总误差方程为:
V=AX-L
(4)
要解10个未知数,至少需要5个控制点。
2 分区域标定思想
由传统的相机标定方法可对整个画幅进行相机标定,从而得到一组相机参数,利用这组参数进行像点修正会使整幅影像内的像素点得到平均修正。但是由于相机和镜头加工工艺过程中难免会出现偏差,即使有些镜头经过了精加工,也不可能保证物体经过镜头投影到CCD感光元件上的影像在每一处的畸变都相同,因此本文提出一种分区域标定方法以提高不同区域的测量精度。
镜头畸变主要体现为桶形畸变和枕形畸变,对镜片进行粗细研磨加工时,边缘对称固定同心对称,在以光学中心为对称轴的对称区域上造成的影像畸变大致相同。故利用该原理可以以对称分割的方法将标定区域进行对称分割,如图3和图4所示的对称分区域法将像平面分成N个对称子区域。
先用上述后方交会算法对整个区域进行标定得到图像中心位置(Cx,Cy),对每个子区域采用统一的图像中心,接着按照中心轴对称的方法将整个标定区域从中间向左右两个方向以对称的方式将控制场分为N个对称子区域(由于本试验在实验室进行故场地范围有限仅对单区域、对称分2区域和对称分3区域进行标定试验验证),接着分别对这N个子区域进行相机标定。

图4 标定场对称分成3区域示意图
3 实验分析
本次试验过程使用两台Canon EOS450D型单反数码相,配18~55变焦镜头,CCD芯片大小为22.2 mm×14.8 mm,影像分辨率设定为4 272×2 848 pixel,像元大小约为5.196 6 μm,首先利用后方交会的方式标定两台相机的外方位元素,之后利用两台相机交会测量的方式反算坐标靶的位置从而比较不同标定方式对交会结果的影响。其标定过程首先在实验标定场调整待标定相机视场使控制场靶标尽可能充满整个视场,调整之后将其位置固定并采集标定场影像,之后利用全站仪将标定场内的标定靶中心的三维坐标进行精确测量,作为后方交会的控制点物方坐标数据。采用人工判读的方式判读影像中靶标的中心点像方坐标与全站仪测量的物方坐标形成对应关系,根据式(2)列出N*2个方程,利用最小二乘的方法对相机分别进行单区域和分区域标定,其结果如表1所示。

表1 不同分区方式标定的相机外方位元素
根据计算出的左右相机外方位元素反算各靶标中心点位置的三维坐标,之后与全站仪量测的三维坐标进行比较,将所有参与计算的靶标点误差求和即可得出总误差。由于无论以何种方式进行分区其参与计算的靶标点均相同,故其总误差才具有可比性,具体总误差见表2,各靶标点误差曲线见图5~图7。
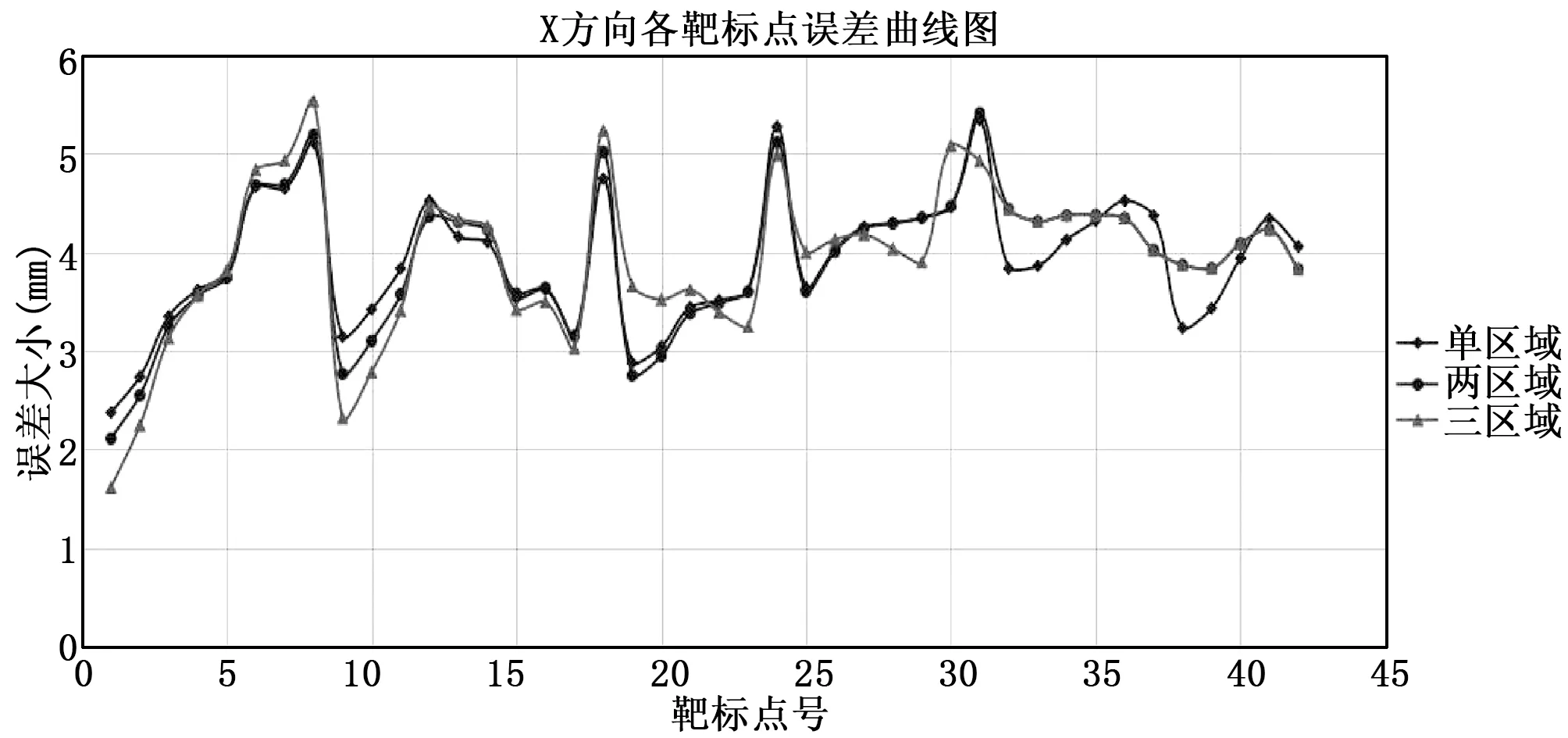
图5 X方向不同分区方式各靶标点误差

图6 Y方向不同分区方式各靶标点误差
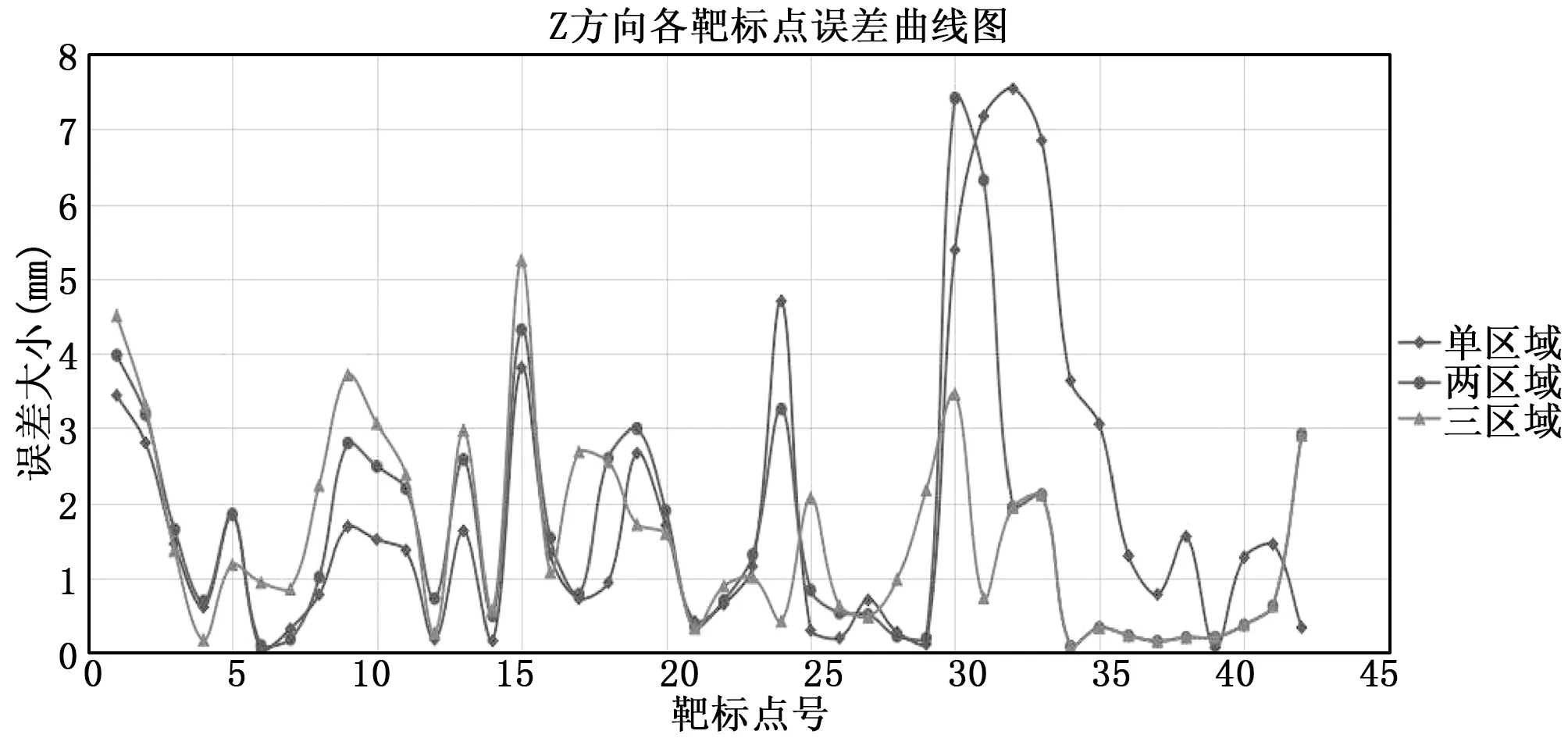
图7 Z方向不同分区方式各靶标点误差

表2 不同分区方式标定误差表
由图5~图7以及表2可以看出标定误差随着分区的增多而变小,尤其是Y方向和Z方向误差减小明显,当分为3个区域时,Y方向误差比单区域标校时降低3%左右,Z方向误差降低约17%,而欧式距离误差降低4%左右。由以上数据可以看出本文提出的分区域方式对于提高相机标定精度有一定的提升作用。
4 结束语
本文针对工业大工件测量领域相机标定问题,提出一种基于固定式靶标的近景大视场角分区域标定方法。本文利用分区域标定的思想将标定场按照左右对称的方式分成若干子区域,接着对各个子区域进行后方交会,得出相机的外方位元素,本文研究方法在控制相机内参数一致的情况下比较分区域标定时标定出的外参数对结果精度的影响。经过在实验室的结果对比可以看出采用本文提出的分区域标定方法,将标定场对称分为3个区域时,总误差比单区域标定时降低4%左右,尤其是Z方向的结果精度更是提高了17%左右,且按照实验结果呈现的趋势可以发现随着分割区域数的增加,精度逐渐提高,经百余架次的飞行试验验证本文提出的方法确实提高了某些关键参数的精度,进一步提升飞行试验的可靠性。本文提出的方法特别适用于大工件测量领域,例如航天航空等测量区域较大的场景,该方法可明显提高其测量精度。
[1] 刘 巍, 李 肖, 马 鑫, 等. 采用复合式靶标的近景大视场相机标定方法[J]. 红外与激光工程, 2016, 45(7): 230-236.
[2]刘书桂, 姜珍珠, 董英华, 等. 采用移动光靶标的分区域相机标定[J]. 光学 精密工程, 2014, 22(2): 259-265.
[3]杨博文, 张丽艳, 叶 南, 等. 面向大视场视觉测量的摄像机标定技术[J]. 光学学报, 2012, 32(9): 159-167.
[4]Kushner L K, Littell J, Cassell A M. Photogrammetry of a Hypersonic Inflatable Aerodynamic Decelerator in the NFAC[A].22nd AIAA Aerodynamic Decelerator Systems Conference[C]. 2013.
[5]郑顺义, 黄荣永, 郭宝云, 等. 附约束条件的立体相机标定方法[J]. 测绘学报, 2012, 41(6): 877-885.
[6]杨化超, 张书毕, 刘 超. 基于灭点理论和平面控制场的相机标定方法研究[J]. 中国图象图形学报, 2010, 15(8): 1168-1174.
[7]夏仁波, 刘伟军, 赵吉宾, 等. 基于圆形标志点的全自动相机标定方法[J]. 仪器仪表学报, 2009 (2): 368-373.
[8]吴凡路, 刘建军, 任 鑫, 等. 基于圆形标志点的深空探测全景相机标定方法[J]. 光学学报, 2013, 33(11): 1115-1115.
[9]胡丙华, 晏 晖, 陈 贝. 试飞测试中摄像机标定方法研究[J]. 测控技术, 2013, 32(5): 134-137.
[10]吴 军, 徐 刚, 董增来, 等. 引入灭点约束的 TSAI 两步法相机标定改进研究[J]. 武汉大学学报: 信息科学版, 2012, 37(1): 17-21.
[11]Graves S S, Burner A W. Development of an intelligent videogrammetric wind tunnel measurement system[C].International Symposium on Optical Science and Technology. International Society for Optics and Photonics, 2001: 120-131.
[12]Jia Z, Ma X, Liu W, et al. Pose measurement method and experiments for high-speed rolling targets in a wind tunnel[J]. Sensors, 2014, 14(12): 23933-23953.
[13]刘 巍, 尚志亮, 马 鑫, 等. 基于彩色编码的副油箱风洞模型位姿测量方法[J]. 航空学报, 2014, 36(5):1156-1563.
[14]Jones T, Lunsford C. A Photogrammetric System for Model Attitude Measurement in Hypersonce Wind Tunnels[A].45th AIAA Aerospace Sciences Meeting and Exhibit[C]. 2007: 1164.
[15]Martinez B, Bastide M, Wey P. Free flight measurement technique in shock tunnel[A].30th AIAA aerodynamic measurement technology and ground testing conference[C]. 2014: 2523.
[16]Kalpoe D, Khoshelham K, Gorte B. Vibration measurement of a model wind turbine using high speed photogrammetry[A].SPIE Optical Metrology. International Society for Optics and Photonics[C]. 2011: 80850J-80850J-11.
[17]胡 浩, 梁 晋, 唐正宗, 等. 大视场多像机视频测量系统的全局标定[J]. 光学精密工程, 2012, 20(2): 369-378.
ResearchonCalibrationMethodofSub-areaofLargeFieldofView
Liu Xiaolei,Zhang Xingguo,Wu Heng,Hou Haixiao
(Chinese Flight Test Establishment, Xi’an 710089, China)
Aiming at the problem of low calibration accuracy for large - scale camera in flight test, a high - precision CCD camera sub - area calibration method is proposed.The method first places the target evenly within the camera field of view,so that the target as wide as possible to fill the entire field of view.And then combined with the way the human eye to solve the target image plane position.Finally with the total station three-dimensional coordinates to form a precise spatial calibration point set.Then, the image plane is divided into N regions by equidistant direction in the transverse direction, and the camera parameters are calculated for each sub-region in combination with the method of the intersection.The results of calibration experiment show that the total error of the camera acquisition point is 4% lower than that of the single region calibration method after the regional calibration.Algorithm can achieve the specified area of the camera parameter calculation, the basic to meet the high precision industrial measurement requirements.The proposed sub-regional camera calibration method can be applied to the relatively constant position of the industrial visual measurement, especially in the field of large workpiece measurement.
close-range photogrammetry; resection; forward rendezvous; subregion; camera calibration
2017-09-08;
2017-10-11。
复杂地面背景下低可探测运动目标红外感知技术(F050105)。
刘晓磊(1992-),男,硕士,助理工程师,主要从事摄影测量、计算机视觉、光电测试方向的研究。
1671-4598(2017)11-0262-03
10.16526/j.cnki.11-4762/tp.2017.11.066
TP311.52
A
