浅析无人机影像自检校光束法区域网平差精度
2017-12-14
(湖南辉达规划勘测设计研究有限公司 湖南 长沙 410000)
浅析无人机影像自检校光束法区域网平差精度
吴昌
(湖南辉达规划勘测设计研究有限公司湖南长沙410000)
随着科学技术的迅速发展,人们的生活水平的极大提高,对于新鲜事物的探索意识和探索能力也在不断的加强,对于很多人类难以挑战和完成的任务和工作也会考虑使用一定的技术去帮助我们完成的同时还能保证技术的提高和精确度的提高。无人机的出现就是对复杂地区、多云多雾地区的拍摄进行很好的飞行处理,进行灵活的完成任务,但是其中的镜头比较小,所以对于实际获取的影响具有一定的影响,一般而言影像的幅度比较小,数量比较多,而且重叠度不规则。所以对于无人机获取的影响在处理的方法和处理的过程中也是和传统的航空影像比较不同。本文就是在介绍了无人机影像和“自检校法”的基础上,无人机影像自检校光束法区域网平差模型、常规光束法区域网平差、自检校光束法平差模型进行了分析,对其中的试验结果进行探讨,最后分析出对如何更好的定位精度的一些建议和措施。
无人机影像;自检校;光束法区域网平差
引言
无人机遥感系统是我们在实际的操作中通过遥控器对无人飞行器的控制,从而使其具有低空检测和进行一定的摄像的能。目前在很多方面的应用已经比较广泛,比如在农村的土地确权上,在海洋环境的检测上,在地质灾害的勘察上,在人为很难达到或者进行实际操作的复杂环境下[1]。无人机摄像技术的广泛使得对其探究和功能优化的力度也在不断的加大,目前,对无人机摄像误差的分析和处理主要采用空中三角测量的方法,但是,文章[2]已经表明,在已经引入了误差的预更正后,平差之后的结果仍然在一定程度上存在较大的误差需要我们去分析。
一、无人机影像和“自检校法”介绍
(一)无人机影像介绍
无人机在传统的概念理解上应该是无人驾驶的飞机,这里指的是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,它具有体积小、造价低、使用方便、对作战环境要求低、战场生存能力较强等优点。在无人机摄像中就是采用无人机的优点对环境复杂或者要求比较多的地方进行摄像处理,往往能达到意想不到的结果。
(二)“自检校法”介绍[3]
“自检校法”是目前的使用和研究中在空中三角测量的基础上对系统误差的消除最有效和最灵活的方法,是使用最为广泛的方法,同时也是处理效果最好的。在处理的原则上把相片的坐标函数作为相片的系统误差,但是对于使用的无人机数码相机需要建立一定的系统误差模型,需要对误差的模型和相关的参数进行分析处理。
二、无人机影像自检校光束法区域网平差模型分析
(一)POS辅助光束法区域网平差分析
POS系统是我们经常使用的全球定位系统(GPS)惯性导航系统(INS)进行组合使用的一种组合导航系统,它不但结合了全球定位系统的优点而且有效的使用了惯性导航系统的优点,在进行影像处理的时候,在影像曝光的时刻可以及时的获取使用数码相机的相关信息,包括空间位置和姿态变化,给数据和位置的获取能够对航空影像的定向分析有一定的帮助和支持。POS对于数码相机的空间位置是通过无人机的动态GPS定位技术了测量,该技术是基于GPS接收机采用的。是通过载波相位来进行判断和分析的。POS对于数码相机姿态角的获取是利用其自身具有的惯性测量装置进行分析测量,可以对姿态角进行一定的记录和实时的传输。
利用POS辅助光束法区域网平差分析的基本原理是通过测量点坐标、摄站坐标和姿态角等作为其实际使用的观测值,利用相对应的地面控制点坐标、外方位元素和在实际操作中的各种系统产生的误差改正之后的数值作为一定的待定参数,根据测量点坐标、摄站坐标和姿态角的权,然后采用最小二乘法进行物点三维坐标的求解。主要利用的方法原理是将实际摄影测量的值和非摄影测量的值进行实际的联合平差,然后求解其加密点的坐标。这里把其中的流程归结为图1的流程。

图1 POS系统实际数据处理的流程
(二)常规光束法区域网平差分析
在对POS辅助光束法区域网平差进行分析之后,这里进行介绍常规光束法区域网平差,它是利用光束的原理,在实际的操作测量中待定点、像点(这里是指控制点的像点)、摄影中心、地面点都可以构成一条光束。利用平差基本单元和平差基础方程的方法进行分析数据,处理数据,平差的基本单元选用形成的一条光束,平差基础方程为共线方程。对观测值的选择一般是用像点的坐标,其他的坐标和元素作为待定参数(主要是利用地面点坐标以及相应的摄像外方位元素),对1张相片能够列出2个误差方程,对于n张就能列出2n个误差方程进行求解待定点的地面坐标。
(三)自检校光束法平差模型分析
一般而言,在处理的原则上我们把相片的坐标函数作为相片的系统误差,但是对于使用的无人机数码相机需要建立一定的系统误差模型,需要对误差的模型和相关的参数进行分析处理。在前面介绍和分析了以光线束为基本单元的常规光束法区域网平差方法,在其连接的误差方程中,如何能利用一定的参数对系统的误差进行抵偿,将会有效的增加其中的准确性,在实际的操作中可以通过增加待定参数,这种方法称为光束法区域网平差。
对像点坐标中产生的所有系统误差进行消除,使其能够有效的满足中心点和像点以及物点共线的这一基本条件。主要是通过共线条件方程进行一定的改进,将改进后的误差方程(包括地面控制点的、GPS和POS观测值的)根据最小二乘法的原则进行整体的平差计算,这样可以得到参数的估值和其他参数的数值也会被遗弃计算出来。
(四)自检校光束法平差精度分析
自检校光束法平差的精度是在进行质量控制的关键方面,是进行空中三角测量的基础组成,我们一般可以根据理论分析法或者是试验验证法进行对其精度进行测量和计算。对于理论分析法要利用统计学中的知识和内容进行计算分析的,在统计学中方差-协方差的传播定律是推导平差量精度的关键。对于试验验证法,需要在地面上固定大量的检查点,对检查点进行坐标记录分析,对实际测量的平面位置和计算出的结果进行比较,把其中的差值当做一定的真误差在实际的对比中作为一定的参考。
三、实验结果分析
(一)实验数据的测量
在某一地区采用实地的测量进行结果的分析,利用2条航带20张影像,对每条航带上10张影像进行实际试验。在其他的参数中,GSD=5cm,像幅6000×4000,像素5.97um,控制点的个数采用3个,对上述各项数据进行说明时候对数据平差进行分析。
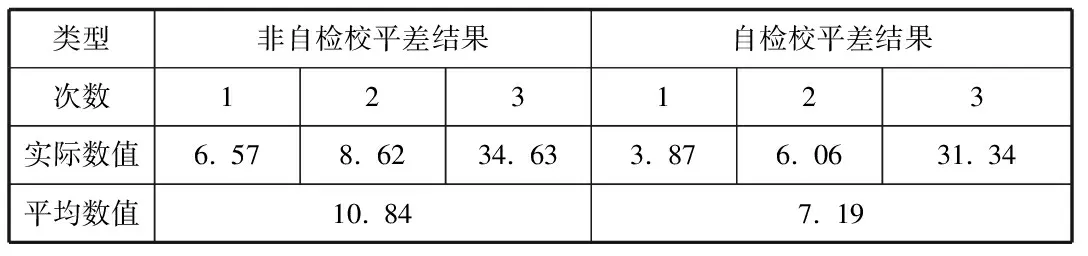
表2 外方位元素精度(m)
(二)实验结果分析
对每一种方法的测量计算结果进行分析和讨论,我们主要能得出下面几个结论:
(1)对POS辅助光束法区域网平差方法和常规光束法区域网平差方法的精度进行分析,我们能够发现,常规光束法区域网平差方法在一定的程度上要远远高于POS辅助光束法区域网平差方法,但是在实际的测量和数据采集的时候,常规光束法区域网平差方法需要在地面设置大量的控制点,对于有些地理条件比较复杂或者环境季候比较恶劣的地方是非常困难的。相比较而言,POS辅助光束法区域网平差方法在实际的应用中比较普遍,还能减少工作的强度,有效的提工作的效率。
(2)在采用以上几种校验方法进行试验的同时得到不同的数据和结果,所得到的相机参数和原始参数也是有一定的差别,我们可以推测出一个结论,动态环境的情况下,初始相机内的参数是在随时发生变化的。
(3)光束法区域网平差在实际的结果中显示对于影响误差的影响比较大,在和其他几种方法对比的情况下,是最为敏感的一种,在对无人机进行初始参数进行检校的时候不能完全的保证无人机的误差最小,在一定的情况下需要进行引入自检校光束法区域网平差,这种方法也是保证误差比较小,保证受到的影响最小的可靠措施。
四、结束语
随着科技的不断发展进步,无人机摄像的发展还有很大的发展空间,当前的影响处理中,空中三角测量的精度还是很难控制,影响还是比较大,由于外界环境对相机参数有一定的影响,所以通过改变相机参数的办法具有一定的限制性,本文提出的自检校光束法区域网平差对这一问题有很好的解决,对于地面控制点的提高,对于精确度的稳定有效都有一定的帮助。
[1]武帅莹.基于无人机影像区域网平差精度研究[J].测绘与空间地理信息,2014.
[2]李天子,郭辉.非量测数码相机的影响纠正[J].测绘通报,2006.
[3]郭忠磊,赵志勇,滕惠忠,申家双,张靓.无人机影像自检校光束法区域网平差精度分析[J].海洋测绘,2016.
吴昌(1985.5-),男,湖南湘潭人,本科,注册测绘师,从事工程测量和航测4d产品生产工作。
