六氟化硫回收处理中心搬运钢瓶机器人开发及应用
2017-12-14姚京松刘晓芳
姚京松,林 磊,陈 东,刘晓芳,杨 旭
(1.国网湖北省电力公司检修公司,湖北 武汉 430050;2.武汉大学,湖北 武汉 430072)
六氟化硫回收处理中心搬运钢瓶机器人开发及应用
姚京松1,林 磊1,陈 东2,刘晓芳,杨 旭1
(1.国网湖北省电力公司检修公司,湖北 武汉 430050;2.武汉大学,湖北 武汉 430072)
针对国网湖北省电力公司六氟化硫气体回收处理中心的需求,设计开发了一种搬运钢瓶的机器人。介绍了机器人的结构和设计方法,规划了仓库的布局,详细分析了机器人的控制要求和实现方法。机器人使用后基本实现了无人化,满足了六氟化硫气体钢瓶仓储的智能化管理和无人化作业的要求。搬运钢瓶机器人是在通用AGV基础上开发而成,实用性强,安全性高,经济性好,便于推广使用。
六氟化硫仓库;搬运钢瓶机器人;开发
0 引言
六氟化硫气体(SF6)是一种理想的绝缘介质,具有极好的绝缘灭弧性能,广泛应用在电力行业中。虽然六氟化硫本身对人体无毒、无害,但它却是一种温室效应气体,其单分子的温室效应是二氧化碳的2.2万倍,是《京都议定书》中被禁止排放的6种温室气体之一。同时,SF6气体在电气设备中使用时,在电弧或异常局部放电的作用下,会分解出有剧毒或强腐蚀性质的物质,这些废气对人和环境都有不同程度的危害[1]。SF6气体储存在气体钢瓶之中,钢瓶直径220 mm,高1 480 mm,满气重量100 kg左右,使用人工搬运时需要多人协作完成;另外,SF6气体钢瓶属于高压薄壁容器,搬运过程存在一定的危险性,泄漏的化学气体还可能对工作人员造成伤害。
1 搬运钢瓶机器人总体设计方案
国网湖北省电力公司六氟化硫气体回收处理中心(以下简称处理中心)是在国家电网公司“减少污染物和废弃物排放,回收再利用SF6气体”的要求下建立的,实现了国网湖北省电力公司对公司内部SF6气体回收、处理再利用的集中管理,有效的实现了控制和杜绝SF6气体排放,对加快绿色电网建设、履行国家电网公司的社会责任具有重要意义。
随着现代电力管理技术水平的发展,迫切要求对处理中心六氟化硫钢瓶仓储进行智能化管理[2],实现无人化运行,因此提出开发一种可用于处理中心的搬运钢瓶机器人,替代人工作业,实现在仓库内外搬运气体钢瓶。搬运钢瓶机器人能够替代人工将SF6钢瓶进行存取、搬运和码垛。搬运钢瓶机器人由AGV导航车、机械臂、主框架、底盘、控制系统等模块构成[3]。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器的优点。
1.1 机器人需要完成的工作
(1)辅助装、卸货功能。可以自动行驶至运货车指定停车区域,在工作人员操控下完成装货或者卸货。
(2)存放钢瓶。机器人在抓取钢瓶之后,按照库管软件的要求,通过磁条路径将钢瓶运送至专用货架前,自动将气体钢瓶放置在货架上。
(3)取出钢瓶。机器人在收到库管系统取货指令之后,按照库管软件的要求,通过磁条路径自动进入仓库,走行到钢瓶专用货架前,自动将放置在货架上的气体钢瓶抓取,并且沿着磁条路径走出仓库,将气体钢瓶运送到接货区。
1.2 机器人结构
搬运钢瓶机器人属于重载机器人,综合考虑经济性、功能实用性、机动性、承载力等多方面因素,采用导航背负式机器人。搬运钢瓶机器人整体运行方式为磁条导航。
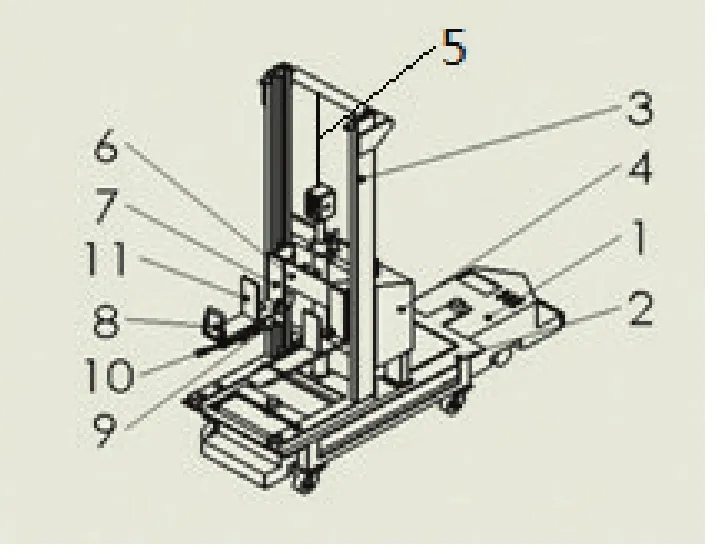
图1 搬运钢瓶机器人总体结构Fig.1 The overall structure of the cylinder robot
搬运钢瓶机器人由磁条引导式AGV小车、升降机构、钢瓶抓取机构、控制系统组成,总高度为1 971 mm,机械臂升降的有效行程为1 300 mm,机械臂处于最顶端时高1 750 mm,处于最低端时高450 mm,如图1所示。搬运机器人的机械臂升降机构、钢瓶抓取机构布置在磁导式AGV上面。AGV小车1与主框架2通过销轴连接并用轴套固定,连接处安装有燕尾螺栓限制主框架2的自由度,主框架2与升降架3以及液压泵站4通过螺栓连接在一起;升降架3的两侧U型导槽上安装有多个行程开关用于检测叉架上升的位置;液压泵站为顶升油缸和夹紧油缸提供动力,顶升油缸的最大推力为2 000 kg,有效行程为750 mm,使用传动链5与叉架6连接起来。机械臂7上安装有钢瓶的压紧机构,防止运输时钢瓶晃动。压紧机构由压板8、夹紧油缸9、连杆10、挡板11组成,压板8与机械臂7铰接,夹紧油缸9与机械臂7通过法兰连接,挡板11与机械臂7焊接。夹紧油缸9由电磁阀控制,通过连杆10将压板8顶起从而压紧钢瓶。搬运机器人抓取钢瓶的方式是横向抓取,在运输过程中钢瓶处于升降架最低点。
2 导航设计及仓库布局
搬运钢瓶机器人整体运行方式为磁条导航。定制的AGV导航小车具有磁条导航的能力,根据需要在仓库地面布置磁条导轨,在需要执行停止、转弯、倒退等命令的位置安装对应RFID定位芯片[4],在AGV导航小车底部安装有磁传感器,当AGV导航小车运动到RFID芯片安装位置时,可在该位置对需要进行的动作做出判断,并发出对应指令。搬运机器人采用AGV小车走行,走行轨迹采用磁条导向。因此,根据AGV的行走要求,以及钢瓶的放置要求,需要在仓库内安装磁导条、位置传感器等[5]。
图2所示为处理中心仓库布局图。仓库平面结构为长12.71 m、宽8.14 m,中间有隔断墙,门高2.16 m。图2中黑色轮廓线为仓库墙壁,黄色线为AGV导航小车行走路线即磁导轨布置线路,蓝色框为钢瓶放置架放置处。
为了提高库容,便于机器人存、取钢瓶,需要设计专用的钢瓶放置架。图3所示为放置钢瓶的货架示意图。该款钢瓶放置架可放置3层钢瓶,层间距为500 mm,货架最外缘离墙壁距离为500 mm,货架与货架的间距为1 020 mm,中间位置留有700 mm的镂空以方便机械叉臂的进入和退出。货架的支脚和背部都通过地脚螺栓与地面和墙壁固定。

图2 六氟化硫仓库布局图Fig.2 Layout of the sulfur hexafluoride warehouse

图3 放置钢瓶的货架示意图Fig.3 Schematic diagram of the shelves for placing cylinders
3 搬运钢瓶机器人控制
3.1 钢瓶搬运机器人运动控制系统设计
钢瓶搬运机器人的动作由AGV与机械臂配合完成。AGV控制系统由AGV厂家完成。机械臂由电磁换向阀进行控制。机器人内部装有X86架构工业计算机,控制机器人的运行状态,协调AGV与机械臂的动作。机器人带有8寸触摸彩色液晶显示器,可显示机器人运行状态,操作界面为全中文显示,通过面板可实现以下功能:(1)手动操作执行搬运任务;(2)检查设备状态;(3)系统参数设置;(4)监视工作状态和电池剩余电量。
机器人工作模式分为两种,一种是全自动运行,按照调度系统指令进行自动工作[6];另一种是手动模式,通过人工手动选择搬运任务,完成搬运工作,不经过机器人调度系统[7]。
3.2 钢瓶存放过程
运货车停至指定停车点后,工作人员通过简易呼叫器呼叫搬运钢瓶机器人,搬运机器人通过预先设定路径到达指定地点后工作人员通过控制面板切换手动遥控模式,人工遥控升降架上升,在确定位置后,人工辅助将钢瓶推至钢瓶机器人上,并通过控制面板发出夹紧指令,然后机械臂上左、右小油缸运动驱动机构夹住钢瓶,这时工作人员再在控制台上选择钢瓶放置货架,用条形码打印机打印条形码,再将条形码贴在钢瓶上。条形码内录有入库时间、入库货架等信息。
完成上述工作后,工作人员在控制台上发出入库信号,搬运机器人沿预先设定路线行驶到指定货架前(从卸货点到任一货架的路径均为预先设置的路径),在到达指定货架后,控制器发出指令,机械臂先上升到一定距离后控制器发送指令给AGV,AGV接收到指令后再向前运动一定的距离(在货架前设置有两个AGV停止定位点),AGV到达第二停止定位点后反馈信息给控制器,控制器接收到反馈信息后,机械臂松开,升降架再缓慢下降,将钢瓶放置在货架上,然后AGV退回第一停止定位点,完成放货,搬运机器人原地等待10 s,确定无新指令后返回仓库门口,原地等待20 s,确定无新指令后返回充电站充电。
3.3 钢瓶取出过程
工作人员通过简易呼叫器将搬运钢瓶机器人呼叫到仓库门口,并在控制面板上选择需要的钢瓶,搬运机器人沿预定路径到达指定货架前的第一停止定位点,到达第一停止定位点后反馈信息给控制器,升降架上升到指定位置,控制器发送信息给AGV,AGV向前运动到第二停止定位点而后反馈信息给控制器,然后机械臂缓缓上升,夹紧油缸驱动机构夹紧钢瓶,上升到一定距离后控制器发送信息给AGV,AGV向后运动到第一停止定位点,在搬运机器人完成上述流程后沿设定路径前往指定卸货点,在到达卸货点后,工作人员通过控制面板转换为手动操作模式,人工遥控叉架升到指定高度,再发出卸货指令,机械臂松开将钢瓶放置在运货车上,完成取出过程。
4 应用
国网湖北省电力公司六氟化硫气体回收处理中心承担着国网湖北省电力公司系统内部SF6气体日常废气净化处理、再生气配发、设备维修及维护等工作,高峰时段日处理气体500 kg以上。在使用机器人之前,SF6气体钢瓶的上下车、出入库、气体回收处理等工作处于人工搬运、操作以及人工统计记录的人力工作阶段,每次搬运钢瓶或者对钢瓶气体进行处理至少需要2名工人;高强度的钢瓶搬运,不仅使得运输工人疲惫不堪,也增加了企业、员工的安全风险。
在使用钢瓶搬运机器人之后,不但节省了人力,保障了人身安全,实现了SF6气体钢瓶仓储的无人化作业,而且做到了资料、档案管理电子化,做到旧气入库、气体再生、钢瓶维护管理、气体灌装、气体检测、气体出入库的全过程闭环管理,规范了制气工艺及检测方法。在工艺改进前共制气45瓶,合格18瓶,不合格27瓶,合格率为40%;工艺改进后制气23瓶,合格19瓶,不合格4瓶,合格率有效提高到82.6%以上。
5 结语
搬运钢瓶机器人是在通用AGV基础上开发的产品,将AGV小车的结构与机械臂的结构相互融合,使二者结构件相互补充,符合国内外现阶段科技发展潮流,结构简单,安全可靠,易于使用,经济性好,利于推广。通过在处理中心的使用可有效解决人员的安全保障问题,同时可有效减轻人工作业量,减少人力资源消耗。
(References)
[1] 杨师斌.六氟化硫气体的危害与预防[J].重庆工商大学学报:自然科学版,2009,26(1):22-26.YANG Shibin.The harm and prevention of sulfur hexafluoride gas[J].Journal of Chongqing Technology and Business University:Natural Science Edition,2009,26(1):22-26.
[2] 袁平,戈洋.六氟化硫气体全面质量监督管理系统软件设计[J]. 湖北电力,2000,24(3):53-54.YUAN Ping,GE Yang.Design discussion of SF6gas quality supervision management software[J].Hubei Electric Power,2000,24(3):53-54.
[3] 吴雄喜.AGV自主导引机器人应用现状及发展趋势[J].机器人技术与应用,2012(3):16-17.WU Xiongxi.Application status and development trend of AGV autonomous guidance robot[J].Robotic Technology&Applications,2012(3):16-17.
[4] 冯玮,陈明.射频识别技术在车辆智能化管理系统中的应用[J].供用电,2010,27(6):88-90.FENG Wei,CHEN Ming.Applicationofradiofrequency identification in the intelligent vehicle management system[J].Power Supply and Use of Electricity,2010,27(6):88-90.
[5] 董平,赵海伶.AGV及AGVS方案研究[J].组合机床与自动化加工技术,2002(2):21-24.DONG Ping,ZHAO Hailing.Study on AGV and AGVS scheme[J].Combined Machine Tool and Automation Processing Technology,2002(2):21-24.
[6] 田朋云,董增文,胡利,等.基于物联网射频技术的仓管机器人设计与实现[J].内蒙古科技大学学报,2015,34(4):337-340.TIAN Pengyun,DONG Zengwen,HU Li,et al.Design and implementation of the warehouse robot based on IOT radio frequency technology[J].Journal of Inner Mongolia University of Science and Technology,2015,34(4):337-340.
[7] 李梅娟,陈雪波,刘臣奇.自动化立体仓库存取设备优化调度方法研究[J].计算机工程与设计,2006,27(2):181-183.LI Meijuan,CHEN Xuebo,LIU Chenqi.Research of optimal scheduling approach on automatic houseware storage/retrievalvehicles[J].ComputerEngineering and Design,2006,27(2):181-183.
The Development of Handling Robot for Sulfur Hexafluoride Treatment Center
YAO Jingsong1,LIN Lei1,CHEN Dong2,LIU Xiaofang1,YANG Xu1
(1.State Grid Hubei Electric Power Company Maintenance Company,Wuhan Hubei 430050,China;2.Wuhan University,Wuhan Hubei 430072,China)
Aiming at the demand of sulfur hexafluoride recovery and treatment center in State Grid Hubei Electric Power Company,a kind of robot for handling cylinder is designed and developed.The structure and design method of the robot are introduced,the layout of the warehouse is planned,and the control requirements and implementation methods of the robot are analyzed in detail.Due to the use of robot,the warehouse unmanned is basically achieved,which meets the requirements of intelligent management and unmanned operation of sulfur hexafluoride gas cylinder storage.Handling robot is developed on the basis of AGV,which has high practicality,security and good economy,and is easy to promote to use.
sulfur hexafluoride warehouse;handling robot;development
TP242.3
A
1006-3986(2017)05-0047-04
10.19308/j.hep.2017.05.011
2017-04-08
姚京松(1975),男,湖北武汉人,学士,高级工程师。
