基于飞行数据的无人机平飞质量分析方法
2017-12-13夏长俊孙校书
夏长俊,孙校书,李 冰
(海军航空大学,山东烟台264001)
基于飞行数据的无人机平飞质量分析方法
夏长俊,孙校书,李 冰
(海军航空大学,山东烟台264001)
利用无人机飞行数据管理记录系统记录的飞行实验数据,对无人机的平飞状态进行了分析。介绍了试验用无人机的结构及性能,概述了无人机飞行数据管理记录系统的功能、构成及记录的主要数据,对无人机平飞质量分析的主要内容及计算分析方法做了详细阐述,并对无人机平飞的高度、速度状态及横侧向误差进行计算分析,分析方法及结果可为无人机的训练、使用提供参考。
无人机;飞行数据管理记录系统;航迹;高度误差;横向误差
水平直线飞行是无人机保持恒定航向和高度的飞行,简称平飞。无人机的其他飞行机动,比如转弯、下降和爬升等,都是从水平直线飞行演变而来的[1]。无人机的平飞状况可以反映无人机的技术性能状态及操控人员的操控状况。和有人机的驾驶相比,无人机的操控缺少飞行员身体对飞机状态的感受。因此,操控无人机的快速性和准确性难以保证,无人机的飞行质量,特别是平飞质量,成为无人机使用者关注的重要参数,它也是评价无人机操控人员的重要依据。对无人机平飞质量分析的途径有2种:一种是利用地面雷达遥测系统的遥测数据对无人机平飞状况进行分析;另一种是利用嵌入在无人机地面站及飞控系统中的飞行数据管理记录系统(Flight Data Managementamp;Recorder System,FDMRS)的飞行数据对无人机平飞质量进行分析。其中,FDMRS是能够完成实时采集、记录无人机飞行过程的数据信息,并将其迅速转化为有价值信息的一种综合处理分析系统,依托FDMRS,可以建立完整的无人机检测维护、飞行安全及飞行质量管理体系,它是保证无人机飞行安全、提高完好率和训练效果的有力工具[2-4]。因此,利用无人机的FDMRS数据,可以对无人机的飞行质量及对无人机的操控过程进行评估分析。
1993年,国际飞行安全基金会与美国联邦航空局联合出版了飞行操作质量保证(Flight Operational Quality Assurance,FOQA)计划的项目研究报告。FOQA是一个可以“获取并分析飞机在航行过程中由飞行数据记录器所记录下来的飞行数据,从而提高飞行操作的安全性,改善空中交通管制程序,指导机场与飞机的设计与维护”的项目[5-6]。而对于无人机,在对其快速、准确操控难以保证的条件下,其每次飞行质量也各有千秋,因而有必要依据飞行数据对无人机的飞行质量及无人机操控人员的操作状况进行分析研究[7-8]。本文依托XL-2G型无人机FDMRS的飞行数据,对XL-2G型无人机的平飞质量及操控人员的操作状况进行分析研究。
1 XL-2 G型无人机系统简介
XL-2G型无人机为某学院研制的小型固定翼舰载无人机,见图1,主要用于科研实验、飞行及挂索着舰训练,它可以完成自主起飞、在航线飞行中搜索靶标并空投物品、触舰复飞和挂索着舰等任务。XL-2G无人机系统主要由遥控手柄、地面控制站及无人机平台3部分组成。
遥控手柄用于清晰视距内对无人机的操控;地面控制站通过无线通讯对无人机进行检测、参数设置及远程飞行时对无人机进行指令控制[9-10];无人机平台采用常规气动布局,前置单缸汽油发动机,螺旋桨驱动,机翼为无后掠梯形翼。无人机平台的主要组成有:螺旋桨、发动机及减速器、机翼及副翼、平尾及升降舵、垂尾及方向舵、机舱及轮胎、尾钩及收放系统、油箱、加泄油系统及管路、飞控系统、无线通讯系统、磁罗盘及GPS、可见光/红外摄像机、传感系统,包括空速管、气压计等、电源系统。[11-14]
飞控系统的主要功能是航线规划及飞行时对无人机的实时控制,其另一个重要功能是利用内嵌的FDMRS对飞行数据的收集记录;无线通讯系统包括无人机与遥控手柄的通讯通道以及与地面控制站的指令数据通讯通道。XL-2G型无人机系统的主要性能指标如表1所示。
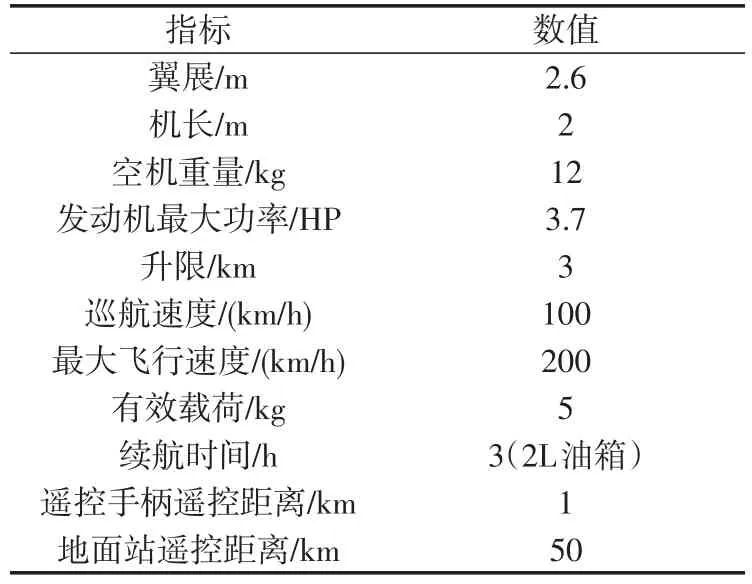
表1 XL-2G型无人机系统主要性能指标Tab.1 Main performance of XL-2G UAV
2 无人机飞行数据管理记录系统
无人机飞行数据管理记录系统用以实时采集、处理、存储记录和实时传输飞行参数,用以监视无人机飞行状态和无人机各部件的使用状况。如自动执行对无人机电源的实时检测,以及飞行操纵情况的监视记录,其检测结果被记录在飞行数据管理记录系统的存储设备上。飞行数据管理记录系统有以下重要的作用[15-18]:①飞行训练数据的记录与重现,以便监视飞行操纵、评估飞行质量;②飞行事故数据的监视与重现,以便对意外事件和事故的鉴定分析;③单机状态跟踪,以便分析出各种飞行状态的最佳条件,并建立单机数据档案;④无人机维护诊断,以便发现故障并进行诊断分析;⑤保证无人机状态有效,以便进行飞机安全性评估分析;⑥为新机的改进、改型研制提供设计依据。
XL-2G型无人机的飞行数据管理记录系统把无人机平台上的无线通讯系统、传感系统、罗盘及GPS系统、电源系统等系统设备上的数据采集起来,并收集飞控系统计算的多种飞行控制参数,联合后按照一定的数据格式、编码标准和规范压缩存储在存储设备上,其结构如图2所示。FDMRS记录的数据主要有航迹信息、无人机姿态信息、GPS信息、惯导测量信息、大气状态信息、飞行控制器输出信息、指令信息及机载设备信息等,利用这些信息,即可对无人机的飞行质量进行分析。
3 XL-2 G型无人机平飞质量分析
无人机平飞质量分析的主要工作是分析无人机实际飞行航线与规划航线间的误差,包括航线的高度误差、横侧向误差及飞行速度误差[19-20]。
图3展示了无人机航线上每一个航迹点的误差测量方法。其中,高度误差为航迹点V与V在计划航线水平面上投影点P1之间的距离l2,或者为航迹点V在计划航线铅垂面上投影点P2与计划航线之间的距离l4;横侧向误差为航迹点V与V在计划航线铅垂面上投影点P2之间的距离l1,或者为航迹点V在计划航线水平面上投影点P1与计划航线之间的距离l3;速度误差为航迹点V在计划航线上的投影点P3的速度与计划航速的差值。
为分析XL-2G型无人机平飞质量,规划了5条平飞航线,见表2。飞行实施后,可将飞行数据管理记录系统的飞行航迹数据由地理坐标系转换为东-北-天大地坐标系,转换后的计划航线和实际飞行航线如图4所示。

表2 规划的平飞航线Tab.2 Planning level flight line
3.1 平飞高度分析
利用FDMRS的高度数据,可对无人机航线的高度飞行状态进行分析,其5条航线的高度飞行状况见表3。其中,4号航线沿航向的高度误差状态如图5所示。4号航线的飞行高度区间为147.3~154.4 m,平均高度为150.2 m,标准差为1.8 m。比较5条航线飞行高度的分析结果:1号航线的高度区间大小是3.8 m,标准差为1.2 m,飞行高度保持很好;5号航线的高度区间大小是9.7 m,标准差为2.3 m,飞行高度保持较差。

表3 航线的高度分析结果Tab.3 Height analysis result of practical line
3.2 横侧向误差分析
FDMRS的飞行数据中没有飞行航线的横侧向数据,但可以根据航迹的地理坐标系计算航迹横侧向偏差。把航迹的地理坐标系转换为大地坐标系,航迹的大地坐标为航迹在计划航线水平面的投影。计算航迹的大地坐标与计划航线的垂直距离,就得到航线的横侧向误差。经计算得到的5条航线的横侧向误差如表4所示。其中,4号航线的横侧向误差如图6所示。4号航线的横侧向误差区间为-9.2~7.8 m,平均误差为0.03 m,标准差为5.5 m。把5条航线的横侧向误差分析结果做比较:5号航线的横侧向误差区间大小是9.0 m,标准差为2.1 m,横侧向误差较小,航向保持较好;4号航线的横侧向误差区间大小是17.0 m,标准差为5.5 m,横侧向误差较小,航向保持较差。

表4 航线的横侧向误差分析结果Tab.4 Cross error analysis result of practical line
3.3 平飞速度分析
航迹点在计划航线上投影点的速度为无人机的平飞速度,也可以用航迹的大地坐标系位置在计划航线上投影的变化速率来代替。经过计算得到5条航线的飞行速度如表5所示。其中,4号航线的速度状态如图8所示。4号航线的飞行速度区间在13.5~39.9 m,平均航速为22.1 m/s,标准差为6.4 m/s。对5条航线的平飞速度进行综合分析:1号航线和5号航线的平飞速度区间大小分别为6.3 m/s、7.0 m/s,标准差分别为1.7 m/s、1.5 m/s,飞行速度保持较好;2号航线、3号航线、4号航线的飞行速度区间大小及标准差都较大,平飞速度保持较差。

表5 无人机平飞速度分析结果Tab.5 Level flight speed analysis result of UAV
4 结束语
本文利用XL-2G型无人机FDMRS的飞行数据对无人机的平飞质量进行了研究分析,分析结果可以作为评判无人机操控人员的评价依据。如果把分析结果和无人机的飞行任务数据做比较,可以评价无人机执行任务的精确程度。后期的研究中,可以根据本文提出的无人机平飞质量的分析方法,统筹考虑各分析参数,建立无人机平飞质量的综合评价标准,为无人机操控人员的训练及评价提供依据。
[1]美国联邦航空局.飞机飞行手册[M].陈新河,译.上海:上海交通大学出版社,2010:32-52.FEDERALAVIATIONADMINISTRATION.Airplane flying handbook[M].CHEN XINHE,Translated.Shanghai:Shanghai Jiaotong University Press,2010:32-52.(in Chinese)
[2]汤丽.飞行数据管理记录系统关键技术研究[D].西安:西北工业大学,2004:1-5.TANG LI.Research on the key technology of flight data managementamp;recorder system[D].Xi’an:Northwestern Polytechnical University,2004:1-5.(in Chinese)
[3]王鹏,王晓亮,张喆,等.基于存储过程的通航飞行数据处理系统[J].计算机工程与设计,2015,36(4):1084-1089.WANG PENG,WANG XIAOLIANG,ZHANG ZHE,et al.General aviation flight data processing system based on stored procedure[J].Computer Engineering and Design,2015,36(4):1084-1089.(in Chinese)
[4]韩玮,翟正军,姜红梅,等.飞行数据综合记录与分析系统的设计与实现[J].计算机工程与设计,2007,28(17):4195-4197.HAN WEI,ZHAI ZHENGJUN,JIANG HONGMEI,et al.Design and realization of on-aero integration data collection and analysis system[J].Computer Engineering and Design,2007,28(17):4195-4197.(in Chinese)
[5]孙同江.飞行数据的应用研究[D].南京:南京航空航天大学,2003:25-31.SUN TONGJIANG.Research on the application of flight data[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2003:25-31.(in Chinese)
[6]蒋支运,胡文春,陈欣.无人机动态飞行参数处理及应用策略[J].飞机设计,2007,27(1):43-46.JIANG ZHIYUN,HU WENCHUN,CHEN XIN.A dynamic flight processing technique and its application strategy for unmanned aerial vehicles[J].Aircraft Design,2007,27(1):43-46.(in Chinese)
[7]周胜明,赵育良,张玉叶,等.用于飞行动作评估的飞参数据预处理方法[J].兵工自动化,2015,34(5):22-25.ZHOU SHENGMING,ZHAO YULIANG,ZHANG YUYE,et al.The preprocess method of the flight parameter data applied to the evaluation of acrobatic maneuver[J].Ordnance Industry Automation,2015,34(5):22-25.(in Chinese)
[8]曲建岭,唐昌盛,李万泉.基于飞参数据的监控算法研究[J].自动化仪表,2009,30(2):15-17.QU JIANLING,TANG CHANGSHENG,LI WANQUAN.Research on monitoring algorithm based on flight parameters data[J].Process Automation Instrumen-tation,2009,30(2):15-17.(in Chinese)
[9]REG AUSTIN.无人机系统——设计、开发与应用[M].陈自力,江涛,董海瑞,译.北京:国防工业出版社,2013:10-12.REG AUSTIN.Unmanned aircraft systems——UAVS design,development and deployment[M].CHEN ZILI,JIANG TAO,DONG HAIRUI,Translated.Beijing:National Defense Industry Press,2013:10-12.(in Chinese)
[10]刘智腾.小型无人机地面站软件设计与实现[D].南昌:南昌航空大学,2015:29-42.LIU ZHITENG.Design and implementation for small uav ground station software[D].Nanchang:Nanchang Hangkong University,2015:29-42.(in Chinese)
[11]PANAGIOTOU P,KAPAROS P,SALPINGIDOU C,et al.Aerodynamic design of a MALE UAV[J].Aerospace Science and Technology,2016,50:127-138.
[12]PANAGIOTOU P,TSAVLIDIS I,YAKINTHOS K.Conceptual design of a hybrid solar MALE UAV[J].Aerospace Science and Technology,2016,53:207-219.
[13]CETINSOY E,DIKYAR S,HANCER C,et al.Design and construction of a novel quad tilt-wing UAV[J].Mechatronics,2012,22:723-745.
[14]ANDREW RENAULT.A model for assessing UAV system architectures[J].Procedia Computer Science,2015,61:160-167.
[15]陈永刚,倪世宏,黄志宇.基于飞行数据的航空发动机寿命监视系统设计[J].航空发动机,2002(4):12-15.CHEN YONGGANG,NI SHIHONG,HUANG ZHIYU.Design of aero engine life monitor system based on flight data[J].Aero Engine,2002(4):12-15.(in Chinese)
[16]赵振宇.空管系统中飞行数据处理的研究与应用[J].电子测试,2015(12):22-23.ZHAO ZHENYU.Research and application of flight data processing in air traffic control system[J].Electronic Test,2015(12):22-23.(in Chinese)
[17]徐新爱.无人机海量飞行数据快速检索方法研究[J].计算机测量与控制,2014,22(12):4181-4183.XU XINAI.Unmanned aerial vehicle mass rapid flight data retrieval method research[J].Computer Measurementamp;Control,2014,22(12):4181-4183.(in Chinese)
[18]李春香.飞行数据可视化技术研究[J].中国安全科学学报,2009,19(1):166-171.LI CHUNXIANG.Research on the visualization technology of flight data[J].China Safety Science Journal,2009,19(1):166-171.(in Chinese)
[19]刘莉雯,张天伟,茹斌.多参数融合的飞行品质评估模型的建立[J].计算机工程与科学,2016,38(6):1262-1268.LIU LIWEN,ZHANG TIANWEI,RU BIN.A flying qualities assessment model based on multi-parameter integration[J].Computer Engineeringamp;Science,2016,38(6):1262-1268.(in Chinese)
[20]郭天豪.无人机飞行品质评价研究[D].长沙:国防科学技术大学,2013:47-49.GUO TIANHAO.Research on flying quality evaluation of unmanned aerial vehicles[D].Changsha:National University of Defense Technology,2013:47-49.(in Chinese)
Analysis Method of UAV Level Flight Quality Based on Flight Data
XIA Changjun,SUN Xiaoshu,LI Bing
(Naval Aviation University,Yantai Shandong 264001,China)
The UAV level flight state was analyzed by using flight testing data that were recorded in UAV flight data management and recorder system.Firstly,the structure and performance of the UAV used is introduced.Secondly,the function,structure and main recorded data of the UAV flight data management and recorder system were illustrated.Thirdly,the analyzing main contents and calculating method of the UAV level fight quality were expounded in detail.Lastly,the level flight height,speed and cross error of UAV were calculation and analyzed.The analysis method and result may be reference for training and using UAV.
UAV;flight data management and recorder system;flight track;height error;cross error
V279;V247.5
A
1673-1522(2017)05-0478-05
10.7682/j.issn.1673-1522.2017.05.012
2017-02-16;
2017-07-22
夏长俊(1979-),男,讲师,博士。