10 kV 带电作业用绝缘斗臂车典型故障排除研究
2017-12-11孙占功林冬晧王辉云朱国军
孙占功,林冬晧,王辉云,朱国军,张 磊
(国网山东省电力公司济南供电公司,山东 济南 250012)
10 kV 带电作业用绝缘斗臂车典型故障排除研究
孙占功,林冬晧,王辉云,朱国军,张 磊
(国网山东省电力公司济南供电公司,山东 济南 250012)
10 kV配电带电作业是提高供电可靠性的重要手段,目前采用绝缘斗臂车进行10 kV带电作业已得到广泛应用。由于使用频次较高,现场作业环境复杂多样,长时间使用造成的磨损以及作业环境的影响,使绝缘斗臂车的动力性、经济性、可靠性下降。对绝缘斗臂车常见的机械故障和电气故障进行分析与研究,给出了故障产生原因及对应的解决措施,快速排除绝缘斗臂车故障,确保车辆处于良好工作状态,为带电作业的高效开展提供保障,具有实践指导价值。
带电作业;绝缘斗臂车;故障排除
0 引言
随着国民经济持续快速发展,工业化进程不断加快,供电可靠性的要求越来越高。目前,10 kV配网带电作业已成为电气设备运行维护工作中不可或缺的检修手段[1-2]。
绝缘斗臂车是具有绝缘高架装置与其运载工具和有关设备,用来提运工作人员和使用器材在配电网开展带电作业的特种车辆[3]。它通常安装在带底盘的机动车上,其工作斗、工作臂、控制油路和线路、斗臂结合部都具有一定的绝缘性能。绝缘斗臂车的绝缘臂具有质量轻、机械强度高、绝缘性能好、憎水性强等特点,在带电作业时为人体提供相与地之间的主绝缘防护。绝缘斗臂车不仅减轻了作业人员的劳动强度,增强了人身安全防护水平,而且具有升空便利、机动性强、应用范围广、可开展复杂带电作业项目等优点,因而在10 kV带电作业工作中得到广泛应用。
为保证绝缘斗臂车安全高效地使用,提高带电作业的安全性及开展效率,当车辆发生故障后,需要及时分析,判断出故障发生的部位及原因,并采取适当的措施予以排除。
1 机械系统典型故障排除
绝缘斗臂车的机械系统由适当布局的机械零部件构成,主要包括副车架、支腿、转台、工作臂、工作斗等机构。
1.1 美系车辆机械系统典型故障排除
目前我国应用的美系车辆主要为混合式绝缘斗臂车和折叠臂式绝缘斗臂车[4],如图1~2所示。
1.1.1 运动功能停止工作
首先检查PTO取力器是否连接,若PTO未连接或连接不牢,应重新连接或固定[5]。其次,检查液压油油位是否正常,液压油未到达液压泵也会导致此故障发生,此时如图3所示。最后检查吸油管路是否堵塞、断裂,以及液压油泵是否工作,必要时维修或更换。

图1 混合式绝缘斗臂车
图2 折叠臂式绝缘斗臂车

图3 液压油箱液压表计
1.1.2 上部控制不动作
故障原因及排除措施如表1所示。
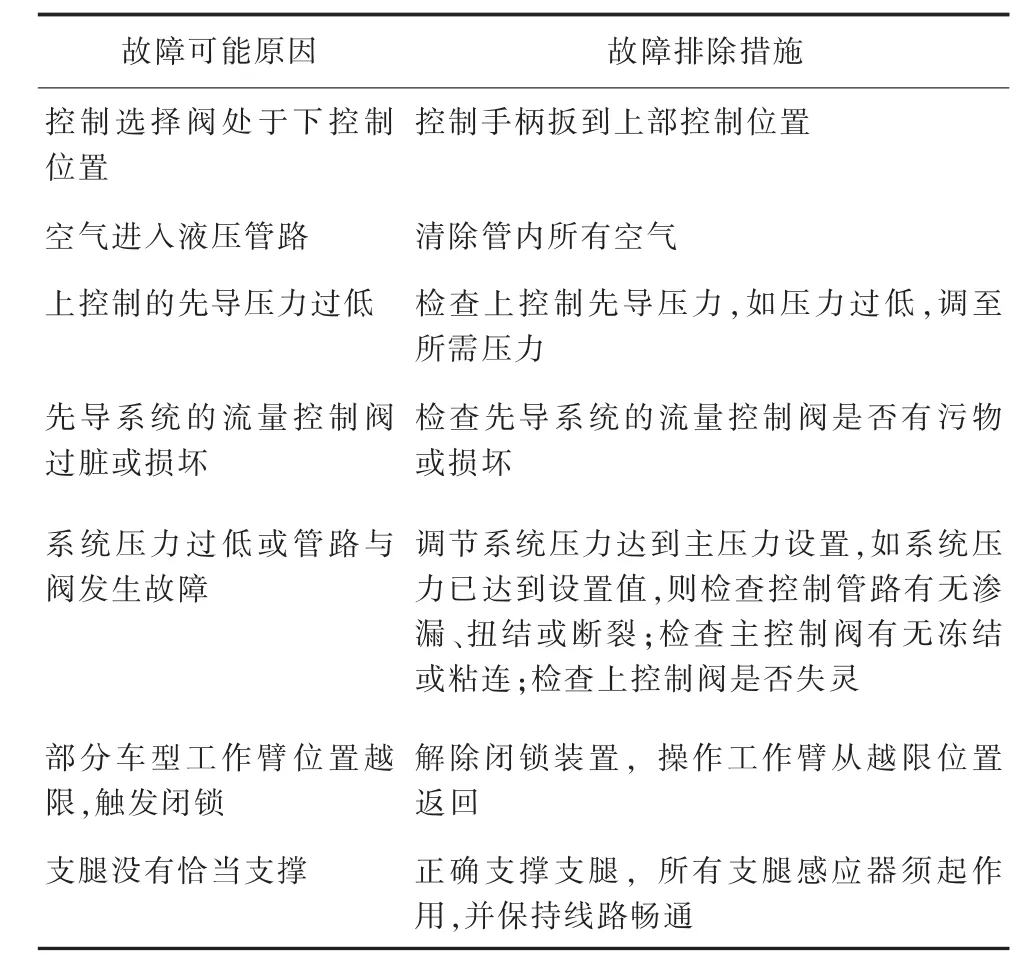
表1 上部控制不动作时故障原因及排除措施
1.1.3 支腿操作不动作
首先检查支腿是否有卡涩现象,必要时进行润滑或替换。其次,检查支腿的液压油路是否堵塞或发生泄漏,若有,应及时进行去堵或更换管路。若支腿的操作阀发生故障,需要对操作阀进行维修或更换。几种常见型式的支腿如图4所示。

图4 常见型式的支腿
1.1.4 支腿支撑不牢
加负载后支腿支撑不牢,发生滑动时,检查支腿油缸是否有泄漏,及时更换油缸密封件。当支腿单向阀受到污染或发生故障时,也会导致支腿发生滑动现象,此时采用溶剂清洗单向阀,用压缩空气吹干,或对单向阀进行维修或更换。
1.1.5 液压工具不动作
首先检查工具阀是否打开;其次,拆卸闭锁阀并盖上工具控制阀的先导控制端油路,以确定闭锁阀是否有故障,并进行维修或更换。
1.1.6 臂架动作缓慢
故障原因及排除措施如表2所示。
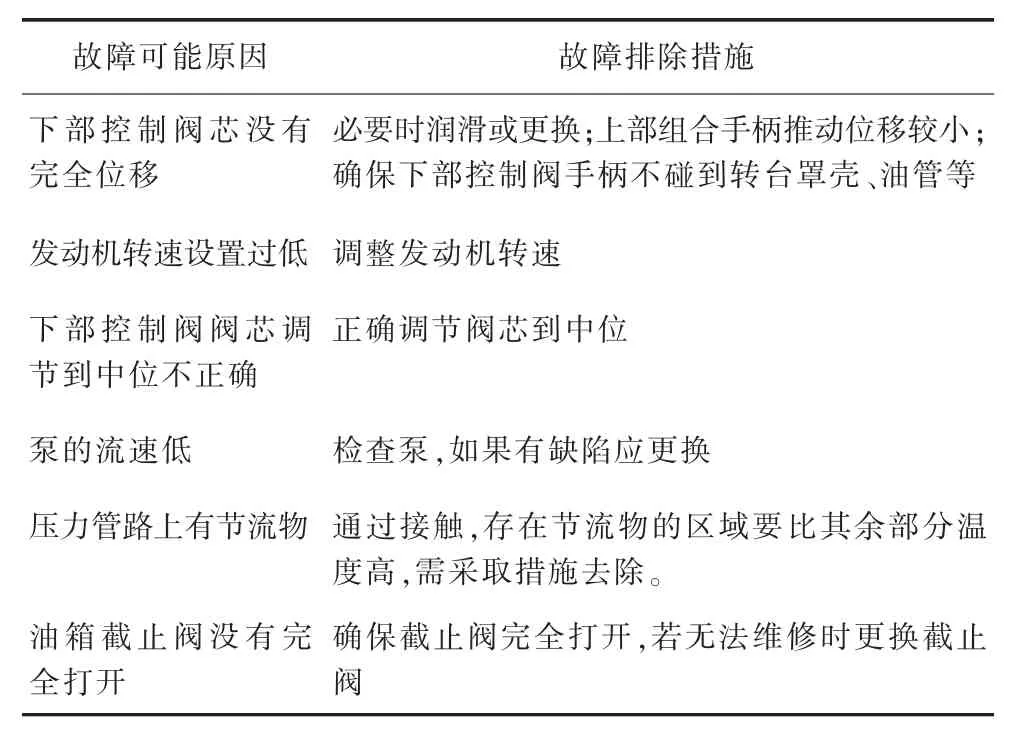
表2 臂架动作缓慢时故障原因及排除措施
1.1.7 伸缩动作不圆滑
当缸筒内有空气,或限速阀调整不当时,会造成臂架伸缩动作不能圆滑过渡或停止时摆动过大,此时需按照车辆的维修方法排除缸筒内的空气,或重新调整限速阀。
1.2 日系车辆机械系统典型故障排除
日系车辆的典型代表车型是伸缩臂式斗臂车,如图5所示。此类车辆的控制系统采用电液控制,即通过电信号来控制液压系统的传动。

图5 伸缩臂式绝缘斗臂车
1.2.1 上部控制不动作
故障原因及排除措施如表3所示。

表3 上部控制不动作时故障原因及排除措施
1.2.2 工作臂无法自动收回
接通工作臂自动收回开关,工作臂不动作。这是由于工作臂的回转位置在收回位置附近或升降角度在15°以下,无法进行自动收回操作。这时用操作手柄收回,或将工作臂移到工作臂自动收回指示灯点亮的位置后再进行自动收回操作。
1.2.3 工作斗倾斜
在进行升降、伸缩操作时,工作斗倾斜。此时确认平衡切换阀的切换操纵杆是否完全被推压复位。
1.2.4 发动机停止
操作工作臂时,发动机停止,工作臂无法操作。这是因为在作业前检查开关接通情况下,进行常规的工作臂操作,如果超过作业前检查时的动作范围,发动机会停止。此时通过驾驶室内钥匙开关再次起动发动机,即可进行常规的工作臂操作。
1.2.5 支腿无法操作
确认工作臂是否收回到工作臂托架上,工作臂是否全部缩回。
1.3 机械系统故障排除注意事项
1)选择足够大的工作场所,将绝缘斗臂车放置水平表面,拉起停车制动并用轮挡锁住车轮。检查液压油位,闭合取力器,妥当设置支腿。
2)松开重型零部件的紧固之前,使用起吊装置安全支撑该零部件。
3)禁止松开或拆除受压的液压软管或接头。断开所有液压软管接头之前,首先标记,以便后续安装。在软管下方放置容器以便接住排出的液压油,并立即用盖子或塞子封住所有处于打开状态的端口。
4)连接液压油路之后,操作系统5~6次,以排出系统内的空气,并检查是否存在液压油泄漏。
5)更换主要零部件之后,须进行结构测试。液压油缸、连接销、回转支撑以及调平系统等零部件均须在完成安装之后进行测试。
6)安装任何可能影响绝缘性能的零部件之后,都应该进行绝缘测试,测试合格后方可使用。
2 电气系统典型故障排除
2.1 电气系统故障识别
短路、开路或零部件故障等都会导致电气系统操作异常。
2.1.1 短路
绝缘斗臂车电气系统发生短路的原因通常包括电线被夹紧、绝缘损坏、松脱连接件接地或存在有缺陷的零部件。
为确认短路位置,可通过断开部分电路来逐步查找短路点,直到短路现象消失为止。检查时首先关闭电源,用欧姆表检查在正常操作期间承受电压的连接件的电阻,如果发现地电位和这些位置之间没有任何电阻,则表示发生短路。
2.1.2 开路
绝缘斗臂车电气系统发生开路的原因通常包括电线脱离连接件、电线损坏、腐蚀或电气零部件与车辆的接地不良等。
发生开路后,应从不工作的零部件附近开始检查。从零部件布线开始追踪,查看是否存在断开的连接件、腐蚀或其他电缆或电线损坏情况。如果零部件与车辆结构件接地,应确认接地连接状态良好。如果布线没有问题且接地良好,断开零部件引线,用兆欧表测量零部件的电阻;如果电阻非常高或无限高,则表明存在开路。
2.1.3 零部件故障
零部件的故障较难确认,可能是开路、短路或零部件无法发挥设计功能。判定时应确认哪些功能受到影响,哪些系统零部件可能是问题所在。如果不能确认开路或短路问题,并且已对零部件施加了合适的电压,则表示故障可能出现在机械方面,而不是电气方面。
2.2 电气系统典型故障排除
2.2.1 外伸支腿报警系统故障
每个外伸支腿控制系统上设计有开关,并与警报相连。当外伸支腿伸出或回收时会触发外伸支腿报警系统,发出警报。
为了保证安全,外伸支腿报警随时都应运行。如果报警工作,检查一下微动开关或报警蜂鸣器是否有接触不良,并检查相应电路的保险丝是否完好。
2.2.2 支腿互锁系统故障
支腿互锁系统用于工作臂工作时闭锁支腿操作系统,并当支腿未伸展或未支撑可靠时闭锁工作臂操作系统。绝缘斗臂车在每个支腿含有一个支腿互锁行程开关或一个距离传感器。电气系统通过开关信号或传感器信号实现互锁功能。
支腿互锁系统的检查:
1)如果主液压系统检修合格但不运行,问题可能是限制开关故障或连接松动。
2)检查从每一个限制开关到互锁电磁阀的所有线路是否连接松动。
3)收回所有支腿,脱开PTO取力器并关掉发动机。测试电路中的每一个限制开关的连续性。如果限制开关不存在连续性,说明限制开关发生故障。
2.2.3 超载防止装置故障
超载防止装置发生故障时,故障表现为负荷率指示灯和工作臂干涉防止指示灯亮,动作停止指示灯闪烁,工作臂无法回收。此时,接通下部操作的应急开关,收回工作臂,进行检修处理。
2.2.4 指示灯故障
指示灯故障原因及排除措施如表4所示。
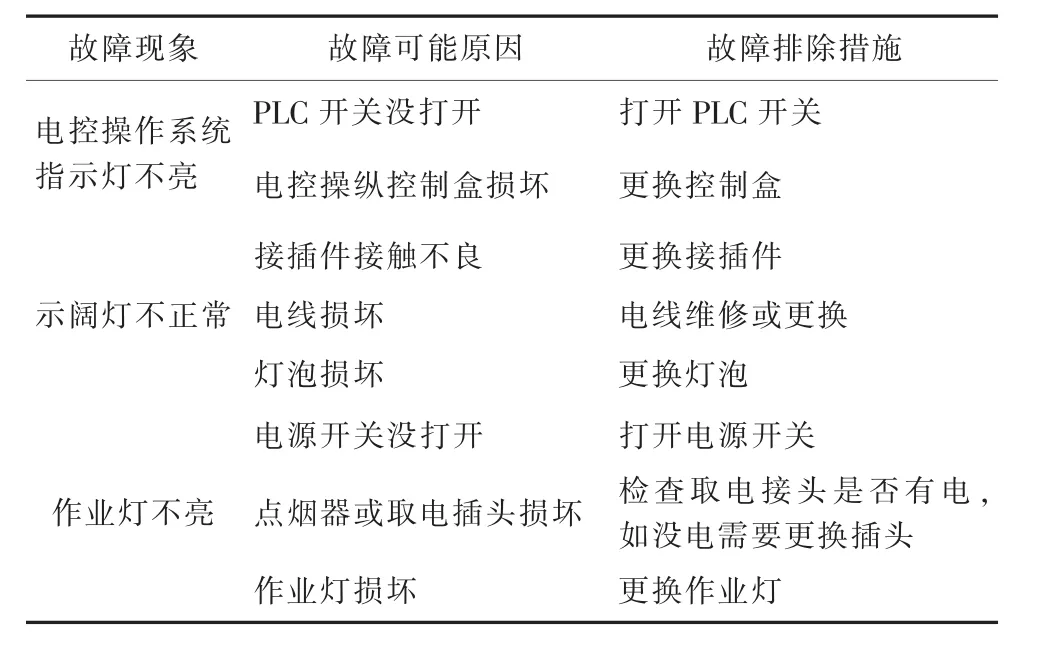
表4 指示灯故障原因及排除措施
3 结语
针对绝缘斗臂车在使用过程中典型的机械故障和电气故障进行分析,并给出了具体的故障排除措施,为绝缘斗臂车使用人员提供了技术指导,为保障车辆处于健康状态,更好地服务于配网不停电作业工作提供了有效支撑,具有很好的推广应用价值。
[1]宋伟.配电线路带电作业[M].北京:中国电力出版社,2010.
[2]郭海云,陈德俊.配电线路带电作业知识读本[M].北京:中国电力出版社,2013.
[3]王平.高空作业车安全操作与维修保养[M].北京:中国建筑工业出版社,2015.
[4]费春明,宋小平,赵志勇.高空作业车作业安全技术[M].北京:中国电力出版社,2010.
[5]王平.高空作业车安全操作与维修保养[M].北京:中国建筑工业出版社,2015.
Study on the Typical Failure Recovery of Aerial Lift Device with Insulating Arm for 10 kV Live Working
SUN Zhangong,LIN Donghao,WANG Huiyun,ZHU Guojun,ZHANG Lei
(State Grid Jinan Power Supply Company,Jinan 250012,China)
The live-line operation is an important measure to ensure the reliability of power supply of the distribution network.Currently,aerial lifting devices with insulating arms are widely used for carrying out 10 kV live-line operation.Due to the friction caused by frequent usage and the complex working environment,the maneuver ability,economic efficiency and reliability of the vehicle declines.To trouble-shoot and remove the failure quickly and ensure the good condition,the typical failure of the mechanical and electrical system is analyzed.The cause and counter measures to these failures are presented.This research would provide safety support for the live-line operation and has significant practical value.
live working;aerial lift device with insulating arm;failure recovery
TM75
B
1007-9904(2017)11-0017-04
2017-06-11
孙占功(1983),工程师,从事带电作业安全生产管理工作;林冬晧(1971),工程师,从事带电作业安全生产、创新创效等管理工作;王辉云(1988),中级工程师,从事带电作业现场作业工作;朱国军(1970),高级技师,从事带电作业生产现场工作;张 磊(1990),助理工程师,从事带电作业生产现场工作。
