基于ArboLiDAR的林分自动分割研究与应用
2017-12-10张晓莉赵鹏祥高凌寒
张晓莉,赵鹏祥,高凌寒,高 婷
(西北农林科技大学 林学院,陕西 杨凌 712100)
基于ArboLiDAR的林分自动分割研究与应用
张晓莉,赵鹏祥,高凌寒,高 婷
(西北农林科技大学 林学院,陕西 杨凌 712100)
森林作为陆地生态系统的主体和自然界功能最完善的资源库,不仅为人类的生存发展提供了物质保障,也在维护陆地乃至全球生态平衡上发挥着重要作用。LIDAR技术作为一种主动遥感手段,在对森林植被空间结构的探测和参数反演方面具有显著的优势。而在森林参数反演之前,对研究区进行合理的林分分割很有必要。利用祁连山大野口林区2008年的激光雷达点云数据,首次引进国外先进的LiDAR点云数据处理软件ArboLiDAR,经过前期的数据分类和相关预处理操作,将数据代入ArboLiDAR软件,通过多次设定相关分割参数,选择最优参数设置,以完成对研究区林分分割操作。并通过对该地区进行了林分平均树高的提取与精度评价,来估测林分自动分割结果,以期提高其他林分参数的估测精度。结果表明:LiDAR数据对林分平均高估测的相关性系数达到0.807,RMSE为1.12 m,精度较高,表明ArboLiDAR平台可以对LIDAR数据做较高精度的林分自动分割,为林分水平上的其他森林参数提取奠定基础,也为LIDAR数据的林分区划提供新的思路。
激光雷达;ArboLiDAR;林分分割;林分平均高
森林作为陆地生态系统的主体,拥有复杂的群落结构,具有最高的生物储存量,不仅是人类赖以生存和发展的物质保障,而且具有防风固沙、保持水土、涵养水源、净化空气等生态功能,尤其是在维护陆地乃至全球生态平衡及生物多样性方面也发挥着不可取代的作用[1]。而激光雷达(Light Detection and Ranging,LiDAR)作为一种先进的主动遥感技术,近年来迅速发展,通过直接获取目标地物的三维空间坐标信息来进行实时三维成像,具有极高的距离分辨率和角分辨率,较强的抗干扰能力,使其可以高精度的获取地表物体的高度信息。激光雷达发射的激光脉冲能部分地穿透树林遮挡,精确地获取树木和林冠下地形地貌,用于提取树高及冠层高度,分析森林覆盖率和面积,了解其疏密程度以及不同树龄树木的情况。此外还可以根据激光回波的反射强度,对森林树种进行分类,从而进行大范围、多树种森林的普查以及森林生态系统树木垂直结构建模等。20世纪80年代中期,激光雷达开始用于森林参数的估测,经过30多年的发展,激光雷达在林业中的应用越来越广,应用技术已逐渐成熟,国内外已有大量成功的尝试[2-5]。
国外对LiDAR点云数据的研究比较早,在数据滤波分类及林业参数提取等方面取得了很大成果。Kraus等[6]提出迭代线性最小二乘法内插滤波算法,可以成功分离出地面点。Vosselman等[7]提出的基于坡度的滤波算法,通过比较相邻两点间的高差或坡度值,划分脚点属性,进而确定点云种类。前苏联Solodukhin等[8]首次利用激光雷达进行森林参数测量,估测的树高与摄影测量估测的树高的均方差根误差为14 cm。Magnussen等[9]运用分位数法,对研究区的花旗松树种的树高测算,并提出了两个树高反演模型,结果发现两个模型都消除了估测平均树高的偏差。Maltamo等[10]利用图像分割软件对CHM(冠层高程模型)进行分割,提取了单株冠幅,确定了单木位置,最终测得林分蓄积量及林分密度。国内对激光雷达数据的研究起步较晚,但发展迅速。夏冰等[11]在研究已有基于Lidar点云的建筑物分割算法基础上,提出了一种结合高程纹理、边缘追踪和规则几何元素检测建筑物目标的分割算法。徐景中博士[12]提出了一种利用点云数据中局部离散的地面点云简化方法。覃驭楚等[13]运用渐进式不规则三角网加密法,对小光斑激光雷达的多次回波数据进行滤波,估测了冠层高与林下高程,结果显示LiDAR数据获取的树高与实地调查的树高的误差绝对平均值均在1.4 m以内。
依托国家林业局948项目,首次引进芬兰先进的LiDAR处理软件ArboLiDAR工具,以甘肃省张掖市大野口林区为研究区,利用ArboLiDAR软件对该地区点云数据进行处理,对该区域做了林分分割,并通过提取的林分平均高来评估分割精度,以便为后续的点云数据处理和其他参数提供参考依据。
1 研究区概况
大野口林区位于甘肃省张掖市祁连山中段肃南裕固自治县马蹄区西水林场,中心地理坐标约为100°15′E,38°32′N,海拔约为 2 700 ~ 3 200 m。该区域东接马鬃梁、西邻西沟梁、南接排露沟、北至正南沟,主要有东岔、西岔、头滩沟、西沟梁沟、观台沟和深沟6条较大支流[14]。年平均气温为5.4℃,最低月平均气温为-12.5℃,最高月平均气温在19.6℃左右;年降水量为300~500 mm,主要集中在6—9月,正是青海云杉生长季节,年蒸发量为1 488 mm[15]。研究区域的主要树种是青海云杉Picea crassifolia,组成结构简单,为天然次生纯林。地表覆盖物主要为苔藓[16-17]。
2 数据来源与研究方法
2.1 数据来源
本研究使用的LiDAR数据来源于黑河综合遥感联合试验:大野口流域飞行区机载LiDAR数据集(2008年6月23日)[18]。飞行航线方位角为北偏东115°,飞行高度距地面约760 m。采用LiteMapper 5600的LiDAR系统,使用双频DGPS和惯性导航系统IMU进行定位。点云密度平均约为每平方米3.43个点,属高密度点云数据。LiDAR点云数据采用的坐标系统为WGS84,采用UTM投影。本次飞行共7条航线,旁向重叠度约为90%以上。
野外样地数据获取时间为2008年6月和2010年8月,由于大野口林区是青海云杉天然次生纯林,青海云杉是针叶树种,生长缓慢,在两年内树木生长量较小,可以作为同期的数据用于此次研究。2008年6月在林区布设了长度为1 000 m的样带,样带方位角与LiDAR数据获取时的飞行航线方向一致。在样带上每隔50 m布设20 m×20 m的方形样地一块,共设置了20块样地。2010年6月在林区沿着山坡走势布设了样地大小为100 m×100 m的超级样地,超级样地靠北的一条边的方向与飞行航线平行。按照20 m×20 m的大小将大样地划分为25个子样地,本次仅使用21个小样地数据参与研究。本研究从超级样地和样带中共选择了41块样地,对每块样地进行每木检尺,测定树高、胸径、冠幅和枝下高等参数。
2.2 研究方法
2.2.1 数据预处理
激光雷达数据预处理包括前期处理和后期处理。前期处理主要是获取的原始激光雷达数据没有坐标、姿态等空间信息,需要对该数据进行相应处理,以得到具有空间坐标和姿态等信息的点云数据。经过前期处理的点云数据在激光雷达系统采集数据时,可能出现因仪器不稳定、空中飞鸟或低空中小型飞行器等造成的高程异常点即为“噪声点”的情况,此时需要进行相应的后期处理,已消除噪声点对点云数据的影响。通常采用提取高点及低点的算法去除噪声点。提取高点的原理是以某一点云为中心点,若该点高程高于给定半径内的其他点的平均高程限差,则判断该点为高点。提取低点时,其原理是给定一个点(中心点),将该点与指定范围的点进行高程比较,若中心点高程明显低于其他点的高程,则判断这个点为低点。根据研究区的实际情况,设置提取点的半径为5 m,最大高程限差为5 m,最小高度差为0.5 m。
2.2.2 数据分类
LiDAR点云数据包括真实地形表面点及地面上各种地物点(建筑物点、植被点),需要将不同类型的点云数据分离开,以便后续操作的进行和提取森林参数。本研究地面滤波采用不规则三角网(TIN)逐步加密滤波算法对LiDAR点云数据进行分类滤波,分离出地面点和非地面点,然后对非地面点数据子集进一步利用高程阈值法结合人工编辑,将非地面点分为植被点和其他类型的激光回波点。在森林地区,若不进行植被之间的详细分类,可以认为激光点云的种类只有四种:地面点、植被点、其他地物点和噪声点。本研究区是森林区,没有建筑物,且地面上基本是藓类覆盖,少有灌木,因此,可将研究区内的点云数据分为:噪音点、地面点及植被点。
2.2.3 林分自动分割
2.2.3.1 林分自动分割预处理
在进行林分自动分割之前,还需要对分类后的点云数据根据研究区的范围进行裁剪和相应的处理操作。为获取地面上地物的真实高度信息,还需要消除地形地势起伏对地物高程及形态的影响即高程归一化的过程,以上所有操作均使用Lastools工具完成。
2.2.3.2 分割变量栅格的生成
ArboLiDAR进行林分自动分割的主要步骤是利用LIDAR数据生成高度和密度两个栅格文件。为了去除LiDAR数据异常值的影响,一般用高度的百分比(通常是85%)而不是最大高度来完成高度栅格的建立。85%植被高度是指植被反射回的LiDAR激光点85%的高度值。该分位处的点云高度与平均树高有很好的相关性。相关的研究也通过采用LiDAR点云不同高度处的分位数作为统计变量建立与林分平均高的关系[19-20]。具体计算方法是先对样地范围内的植被点云进行高度排序,然后计算总高度处的不同分位数处的高度。
植被密度是指在一个像元中植被反射的激光脉冲与所有反射脉冲的比率,即将LiDAR植被点数与LiDAR点总数的比率当做密度值。密度像元值的变化范围是由0(无森林)到1(很茂密的森林)。密度与林分断面积呈良好的相关性。
建立高度和密度栅格后,为得到更精确的分割结果,还需要将初始栅格图像进行滤波处理,以得到较为平滑的图像。根据研究区概况和点云数据的预处理情况,在查阅了大量滤波算法后,本研究将采用中值滤波算法和均值偏移滤波两种过滤方法对栅格图像进行平滑处理。首先采用中值滤波算法,其目的是消除孤立的噪声点,以完成初步平滑。该算法原理是在移动窗口中把图像中某一点的值用该点周围领域各点值的中值代替,让像素灰度值差别较大的像素值接近于周围的像素值,从而消除孤立的噪声点,起到良好的平滑效果[21]。第二次滤波采用均值偏移滤波,在给定的空间和光谱半径基础上进行迭代滤波。该方法具有良好的非线性边缘保持特性[22],可以使栅格图像边缘更加平滑。
2.2.3.3 林分自动分割
通常同一林分是相对同质的森林,常将物种组成及林木大小作为划分林分的标准。林分分割可以通过手动分割和自动分割实现。本研究在ArboLIDAR平台上利用生成的高度栅格和密度栅格完成林分分割。它采用区域增长分割算法。选择该分割算法的依据主要是根据研究区的基本情况、点云数据的质量以及通过阅读相关文献发现采用该算法对大野口地区的研究还相对较少,可以进行相关方法的研究。该算法首先创建分割栅格的梯度图像,梯度图像显示了感兴趣区域的变化值。在创建梯度栅格时会赋予每个波段明确的权重(总和最大值为1),更高的权重会影响原始影像种子点的位置。在每一次迭代周期中使用区域增长算法搜索与种子点周围环境相似的像元,选取合适的种子点,种子点通常是24像素范围内的局部极小值点。分割部分可以自定义设置,窗口大小通常为4或8像素。分割总是会逐像素朝着所在区域内最相似的像素增长,可以调节像素间的竞争阈值以达到更好的视觉效果。竞争阈值决定着分割的方向,没有适用于所有环境通用的参数,因此,参数值取决于分割变量栅格的类型和分割的需求。
参数设置包括每个波段权重的设置及后续合并参数阈值的设置。初始林分自动分割后,对于分割部分较小的区域,需要根据自定义设定的最优值函数,基于初始部分计算的实测数据平均值和标准差,将小区域与邻近有着最优值的部分合并。合并至少需要进行两次,由于合并的区域太大,会产生异质性,因此需要设置不同的参数文件,对合并区域允许的最大限制值依次增大进行设置。
经过合并之后,依据分割图像、实地环境以及影像数据,可以对不合理的区域进行手动分割或合并,以使分割更加合理。
2.2.4 林分平均树高估测
本研究在林分分割的基础上,基于ArboLIDAR平台从LIDAR数据中提取出研究区的林分平均树高。其基本原理是:将LIDAR数据中提取的一系列特征变量与样地平均高建立贝叶斯回归模型,然后基于该模型估测整个研究区的林分平均高。
本研究计算实测样地平均高采用断面积加权法计算,计算公式如下:

式中:为林分平均高,单位为m,hi为第i株林木的树高,gi为第i株林木的胸高断面积,N为样地内林木株数。
3 结果与分析
3.1 点云数据分类状况
将大野口林区的激光雷达数据进行分类滤波处理,可分为噪音点(低点、高点)、地面点、低植被点和林木点4类,分类情况如图1所示:

图1 不同情况下的点云数据图像Fig.1 Point cloud data in different situations
图1(a)是大野口地区分类前的点云数据,以航带的形式显示,一共有七条航带,以不同的颜色叠加显示,可以看出每条航带的飞行方向和扫描区域。(b)图是经过滤波分类后的大野口点云数据图,浅棕色代表噪音点,黄色代表地表植被点,深棕色代表地面点,绿色代表林木点。对LiDAR点云数据进行滤波分类,主要是区分地面点和非地面点,得到的地面点可以提取数字地面模型DEM,得到的非地面点可以再进一步分类为植被、建筑物、道路等,因为大野口地区主要是森林区,没有建筑物,因此非地面点除去噪音点,只有林木点。(c)图是分类后的LiDAR点云数据纵切面图,从此图中可以清晰地看到地面点和非地面点的界限以及点云数据的分布情况。(d)图是经过裁剪后的研究区域的LiDAR点云分类图,此研究区是后续操作的处理区域和基础数据,为林分自动分割操作的执行奠定基础。
3.2 林分自动分割分析
3.2.1 高程归一化处理
对分类后的研究区激光点云数据进行高程归一化处理,得到纯粹的地面上地物的真实高度信息,如图2所示:

图2 高程归一化后的LiDAR点云数据Fig.2 The elevation normalized results of LiDAR point cloud
图2中可以清晰地看到高程归一化后所有的地物都分布在同一水平线上,没有了地形的影响,可以准确地研究该区域森林树高等参数,也可以减小林分自动分割和参数提取时产生的误差,以便更精确的估算森林参数。
3.2.2 制作分割变量栅格
根据高程归一化后的点云数据生成Tileindex文件,将其代入ArboLiDAR中创建高度和密度栅格,然后将经过滤波处理得到的高度和密度栅格合并,以便于林分自动分割操作的进行。如下所示得到图3、图4两个栅格图:

图3 初始的高度栅格(a)中值滤波后的高度栅格(b)均值偏移滤波后的高度栅格(c)Fig.3 Original height raster(a); Median fi ltered height raster(b); Mean-shift fi ltered height raster(c)

图4 初始的密度栅格(a)中值滤波后的密度栅格(b)均值偏移滤波后的密度栅格(c)Fig.4 Original density raster(a); Median fi ltered density raster(b); Mean-shift fi ltered density raster(c)
从图3和图4中可以看到经过滤波处理后的高度栅格和密度栅格边缘更加平滑。图5是经过波段合成后的DHH图像,将两种栅格图像融合,可以同时提取更多的林分信息。高度栅格可以提取更准确的树高信息,密度栅格与林分密度、胸高断面积及林分蓄积量有较强的相关性。本研究最后的验证数据是林分平均高,因此,为更好地估测林分平均高则在波段合成中使用两次高度栅格与密度栅格进行合并,以得到更准确的结果。
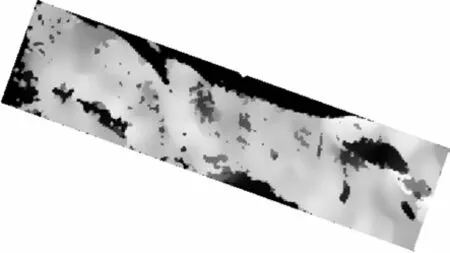
图5 合成的DHH(density-height-height)分割栅格图像Fig.5 Composited DHH(density-height-height)segmentation raster
3.2.3 林分自动分割
对DHH栅格进行林分自动分割。分割后的图像如图6~图8所示:

图6 分割后示例(黄线为分割线)Fig.6 The output of segmentation(Yellow lines is the outlines)
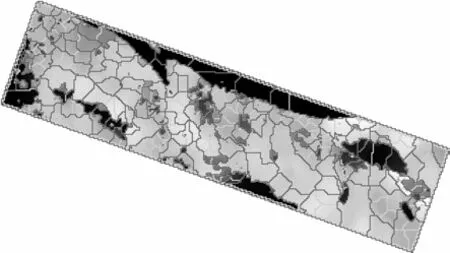
图7 合并后的图像(原始分割部分界限是黄色,合并后是红色)Fig.7 The output of merged raster(Original segment boundaries are shown in yellow, Output of merging is shown with red outlines)
林分自动分割中根据多次的参数设定,最后得到最优参数设定,3个波段的权重分别设为0.3,0.3和0.3。合并参数的最大限制值分别设为0.05,0.10,0.15,0.18。选择这组最优参数设置的依据是对栅格图像赋予不同的波段权重会影响森林参数的提取精度,不同波段决定着不同的森林参数。合并参数的设置是根据分割后小区域的实测数据的平均值及标准差所决定的。合并后的情况还可以根据实际效果进行手动的微调。图6~图8分别显示的是林分自动分割后的图像、经过参数设置合并后的林分分割图像及平滑后的林分分割图像。经过合并平滑后的林分分割界限更加符合实际的研究区分布情况。平滑也有助于减少由于像元形状边界产生的大量不必要的顶点。通过3张图不同颜色的界限显示可以清晰地看出林分自动分割的结果。分割结果的精度会对后续林分参数的提取有影响。
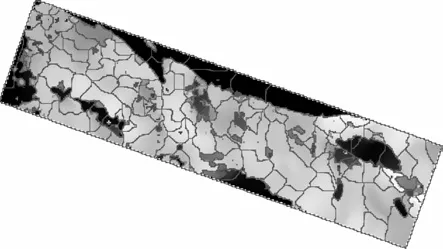
图8 平滑后的图像(简化结果显示蓝色,初始边界显示红色)Fig.8 The output of smoothed raster(Original boundaries are shown in red, Output of smoothing is shown with blue outlines)
3.3 林分树高提取与精度评估
通过ArboLiDAR工具利用原始LiDAR点云数据提取林分平均高,并与实测值进行相关性分析,结果如下:

表1 实测林分平均高与估测林分平均高线性回归统计Table 1 Regression results between field-measured and estimated average height of stand
表1中,Hs是实测样地林分平均高,He为估测林分平均高,单位为m。R2、均方根误差(RMSE)、rRMSE(相对均方根误差)是最常用的评价回归模型的指标。R2值越大,说明因变量与自变量间的相关程度越强,常用来检验回归直线的拟合优度。RMSE是实测值与估测值间的均方根误差,其值越小,则回归模型的预测效果越好。rRMSE是RMSE与估测值的算术平均数的比值,rRMSE的值越小,同样表明了模型的预测效果越好。

图9 实测林分平均高与估测林分平均高散点图像Fig.9 Scatter plots of fi eld-measured and estimated average height of stand
从表1及图9中可看出,利用LiDAR数据估测的林分平均高与实测林分平均高相关性很大,决定系数R2达到0.807,均方根误差(RMSE)为1.12 m,从此数据可以得出,LiDAR数据可以很好的反演林分平均高。同时,通过查阅相关地区的文献,对比其他人的研究发现[16,23],所估测的该地区的林分平均高线性回归方程的相关系数R2相对较高,说明该分割算法对研究区的林分平均高的估测结果较好,能为该地区的森林规划管理提供一种新的思路和途径。
4 结论与讨论
从上述分析结果来看,林分自动分割算法的应用对森林参数的提取起到重要的作用,结论如下:
(1)LiDAR点云数据的分类滤波精度直接决定着LiDAR点云高程归一化的结果,进而影响后续的操作结果。在实际应用中需要根据研究区实际情况选用合适的点云滤波分类方法,设置滤波参数,更好地将地面点与非地面点成功分离;
(2)运用ArboLiDAR对研究区林分进行自动分割时,合适的参数设置及图像滤波是进行林分正确分割的关键。采用中值滤波和均值偏移滤波相结合的方法可以对生成的栅格图像起到很好的平滑效果,为后续的林分自动分割奠定基础。同时,波段权重,最优合并参数的设置也对分割结果产生影响。因此,需经过多次尝试,根据产生的图像效果,选择合适的参数值以便得到更加理想的分割结果,为后续林分参数的提取创造有利的条件;
(3)LiDAR数据对林分平均高估测的相关性系数R2达到0.807,显示了ArboLiDAR在估测林分参数上的优势所在。也为森林资源调查林分水平上的数据处理提供了一种新的思路。
[1]张守攻,朱春全,肖文发.森林可持续经营导论[M].北京:中国林业出版社, 2001.
[2]Rosette JAB, North PRJ, Suarez JC.Vegetation height estimates for a mixed temperate forest using satellite laser altimetry[J].International Journal of Remote Sensing, 2008, 29(5):1475-1493.
[3]Xing LH, Alfred DG, Zhang JJ, Wang LH.An improved method for estimating forest canopy height using ICESat/GLAS full waveform data over sloping terrain: A case study in Changbai mountains, China[J].International Journal of Applied Earth Observation and Geoinformation, 2010, 12(5):385-392.
[4]庞 勇,李增元,陈尔学,等.激光雷达技术及其在林业上的应用[J].林业科学, 2005, 41(3):129-136.
[5]冯仲科,杨伯钢,罗 旭,等.应用LiDAR技术预测林分蓄积量[J].北京林业大学学报, 2007, 29(2):45-51.
[6]Kraus K, Pfeifer N.Determination of terrain models in wooded areas with airborne laser scanner data[J].ISPRS Journal of Photogrammetry & Remote Sensing, 1998, 53(1):193-203.
[7]Vesselman G.Slope based filtering of laser altimetry data[J].International Archives of the Photogrammetry and Remote Sensing, 2000, 33(B3/2):935-942.
[8]Solodukhin V I, Zukov A J, Mazugin I N.Laser aerial pro fi ling of a forest[J].Lew NIILKh Leningrad Lesnoe Khozyaistvo, 1977,10(1): 53-58.
[9]Magnussen S, Eggermont P, LaRiccia V N.Recovering tree heights from airborne laser scanner data[J].Forest science, 1999,45(3):407-422.
[10]Maltamo M, Eerikainen K, Pitkanen J.Estimation of timber volume and stem density based on scanning laser altimetry and expected tree size distribution functions[J].Remote Sensing of Environment, 2004, 90(3):319-330.
[11]夏 冰,苏国中,周 梅,等.LIDAR点云中高精度建筑物分割算法研究[J].微计算机信息(测控自动化), 2010, 26(5-1):210-211,191.
[12]徐景中,万幼川,张圣望.LIDAR地面点云的简化方法研究[J].测绘信息与工程, 2008, 33(1):32-34.
[13]覃驭楚,吴运超,牛 铮,等.基于小光斑激光雷达数据的稀疏林地冠层高程重建[J].自然资源学报, 2008, 23(3):507-510.
[14]牛 赞,刘贤德,敬文茂,等.祁连山大野口流域气温、降水、河川径流特征分析[J].干旱区地理, 2014, 37(5):931-938.
[15]杨国靖,肖笃宁,周立华.祁连山区森林景观格局对水文生态效应的影响[J].水科学进展, 2004, 15(4):489-494.
[16]何祺胜,陈尔学,曹春香,等.基于LIDAR数据的森林参数反演方法研究[J].地球科学进展, 2009, 24(7):748-755.
[17]牛 赟,成彩霞,赵维俊,等.祁连山大野口流域青海云杉林木水文特征与生态因子关系研究[J].中南林业科技大学学报,2017, 37(1):62-68.
[18]庞 勇,陈尔学,刘 强,等.黑河综合遥感联合试验:大野口流域飞行区机载LiDAR数据集[M].北京:中国林业科学研究院;中国科学院遥感应用研究所;中国科学院寒区旱区环境与工程研究,2008.
[19]Lim K, Treitz P, Morrison I, Baldwin K. Estimating aboveground biomass using LiDAR remote sensing[J]. Remote Sensing for Agriculture, Ecosystems, and Hydrology IV, 2003,4879:289-296.
[20]Neasset E. Practical large-scale forest stand inventory using small-footprint airborne scanning laser[J]. Scandinavian Journal of Forest Research,2004,19(2):164-179.
[21]夏 玮,李朝晖.中值滤波的快速算法[J].计算机工程与设计,2002,23(1):58-59.
[22]段福庆,周明全,张家才.基于均值漂移的非线性尺度空间滤波[J].吉林大学学报(工学报),2007,37(3):634-639.
[23]刘清旺.机载激光雷达森林参数估测方法研究[D].北京:中国林业科学研究院,2009.
Research and application of stand automatic segmentation based on ArboLiDAR
ZHANG Xiaoli, ZHAO Pengxiang, GAO Linghan, GAO Ting
(College of Forestry, Northwest A&F University, Yangling 712100, Shaanxi, China)
Forests are the main body of terrestrial ecosystem and the most complete resource library of nature features. They can not only provide the materials for human survival and development, but also play an important role in the maintenance of the land and the global ecological balance. As a kind of active remote sensing technology, light detection and ranging technology has obvious advantages in the detection of the spatial structure of forest vegetation and the inversion of forest parameters. Reasonable forest stand segmentation is the key to the study area before the inversion of forest parameters. This paper introduces the foreign advanced LiDAR point cloud data processing software ArboLiDAR for the fi rst time. First of all, the LiDAR point cloud data using in the Qilian Mountains Dayekou area in 2008 were classi fi ed and related preprocessing operated. Then the optimal parameter settings are selected by setting relevant segmentation parameters, and the operation of the forest segmentation in the study area is completed in ArboLiDAR. Last, the result of the automatic stand segmentation was evaluated through the extraction and validation of the stand average height(HGW) in the area,so as to provide reference for estimating other stand parameters. According to the estimation results show, the correlation coef fi cient of average HGW of stand was 0.807, RMSE to 1.12 m, the precision is high. The result indicated that ArboLiDAR platform can do the automatic segmentation of LiDAR data with high accuracy, lay the foundation for other forest parameters extraction on the stand level,and provide new ideas for the forest regionalization by using LiDAR data.
LiDAR; ArboLiDAR; stand segmentation; average height of stand
S771.8
A
1673-923X(2017)11-0076-08
10.14067/j.cnki.1673-923x.2017.11.013
2016-12-20
国家林业局948项目(2014-4-27)
张晓莉,硕士研究生
赵鹏祥,副教授;E−mail:zhaopengxiang@nwsuaf.edu.cn
张晓莉,赵鹏祥,高凌寒,等.基于ArboLiDAR的林分自动分割研究与应用[J].中南林业科技大学学报,2017, 37(11):76-83.
[本文编校:吴 毅]
