智能清扫机器人行走驱动系统设计
2017-12-08都家宇
都家宇


DOI:10.16661/j.cnki.1672-3791.2017.30.100
摘 要:智能清扫机器人作为服务机器人实用化发展的先行者,替代了传统的人工清洁工作,具有十分广阔的市场前景。行走驱动系统是一个能实现设计要求的理想化的智能清扫机器人的重要组成部分,是清扫机器人的主体。通过总结系统功能和设计要求明细表,确定设计方案,求解功能元,绘制系统功能原理方案的形态学矩阵,通过对比不同功能载体的优劣,找到符合设计方案的最优解,确定结构方案,从而设计出所需的智能清扫机器人行走驱动系统。设计出的行走驱动系统具有小型、平稳、灵活的特点,为机器人提供了结构上的保障,满足了运动方式、运动速度、自我保护等多种功能,适用于家庭、宾馆、办公室等室内环境场合的半自动或全自动清洁。
关键词:智能 小型 行走驱动系统 空间移动 移动机构
中图分类号:TP242 文献标识码:A 文章编号:1672-3791(2017)10(c)-0100-04
随着社会经济的高速发展,人口老龄化越来越严重,人力资源成本不断增加,以提供服务为目的服务机器人逐渐进入了人们的视野。智能清扫机器人作为服务机器人的一种,给人们带来很大的便利且具有好的社会和经济效益。如果把固定式机器人视为对人类手臂动作和功能的模拟和扩展的话,那么具有移动功能的机器人就可对应于人类行走功能的模拟和扩展。清扫机器人行走驱动系统设计的优劣, 直接关系到清扫吸尘任务最终执行的好坏。
1 研究背景及意义
近年来,随着计算机技术与人工智能科学的飞速发展,智能机器人技术逐渐成为现代机器人研究领域的热点。服务机器人的出现主要有三大原因:一是劳动力成本的上升;二是人类想摆脱枯燥乏味的体力劳动;三是人口的老龄化和社会福利制度的完善也为某些服务机器人提供了广泛的市场应用前景[1]。
清扫机器人的出现能够很大程度地提高工作效率,降低劳动成本,彻底将人们从清扫工作中解放,因此具有很重要的意义[2]。在很多国家和地区,清扫机器人作为服务机器人应用的先行者,已经得到了广泛的应用。
2 国内外研究现状综述
2.1 国内产品研究现状
在国内,各个科研机构和院校都开始这方面的研究。浙江大学于1999年初对智能吸尘机器人进行研究,两年后便成功研制出国内第一个具有初步智能的自主吸尘机器人,与苏州TEK公司合作研发,到2003年系统在自主能力和工作效率上都有了显著提高。
国内第一个产品化的清扫机器人是由深圳某家公司生产的KV8保洁机器人,如图1所示,它可以设定虚拟墙,防止机器人跌落楼梯或者台阶。该款清扫机器人采用随机式清扫策略,通过前端的碰撞传感器实现障碍物的识别。它内置三种不同的工作模式,根据不同的工作环境选择合适的模式[2]。
2.2 国外产品研究现状
目前,国外在清扫机器人的研究领域完成了许多工作,取得了一定的成果,如伊莱克斯、日立、松下、三星等世界著名公司都已开发出智能吸尘机器人。德国 Kaercher公司生产的RC3000清扫机器人,它是世界上第一台能够自行完成所有家庭地面清洁工作的清洁机器人。它只有50cm长,能够自动清扫地面,能在完成清扫工作之后,自动返回充电站进行充电,充电时间为10~20min,充一次电能够运行1h左右[3,4]。
此外,2003年11月,三星公司推出一款三星代号为VC-RP30W的机器人吸尘器,主要针对家庭市场。VC-RP30W主要依靠3D地图技术进行定位,避障效果好,能够快速、高效地对房间每个角落进行吸尘;当遇到障碍物或者死角等情况,VC-RP30W会自动转向继续工作[5-10]。
3 智能清扫机器人的组成结构
清扫机器人由五部分组成:主控制系统部分、执行电机部分、传感器部分、输入输出部分和电源部分[1]。结构框图如图2所示。
4 设计方案
4.1 设计目标
本文设计的行走驱动系统主要工作于家庭、宾馆、办公室等路况不复杂、路面平稳的场地,为机器人清扫地面、毛毯上的垃圾灰尘提供动力。首要目标是实现机器人的空间移动,其次还具有平动、转动、抗倾翻、控制运动速度、避免损坏其他物品等功能,在实现这些功能的前提下尽可能提高行走驱动系统的实用、经济、美观、环保等性能。
4.2 系统功能
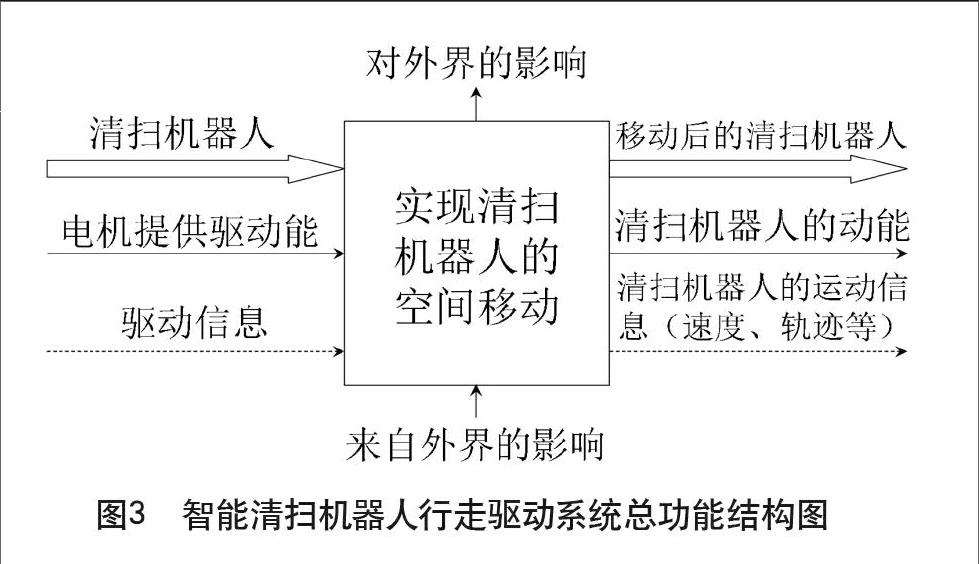
对系统的总功能进行描述就是通过对任务的抽象进一步认识问题的本质,以便更好地求得相应的物理效应、解决原理和途径,并对其进行优化。
确定系统总功能后,建立系统的总功能结构图,如图3所示。
建立智能清扫机器人行走驱动系统的功能树,如图4所示。
4.3 设计要求明细表
在對相关产品进行调研后,根据设计目标和系统功能,将定性说明转化为定量说明,制定设计产品的设计要求明细表,如表1所示。
5 结构方案
5.1 功能元的求解
功能元的求解是指选择实用的科技工作原理,构思实现工作原理的技术结构,即功能载体。
下面对于行走驱动系统的转弯功能选择其工作原理,构思其功能载体。在机械学内寻找合适的工作原理。查阅相应的设计原理方案目录,得到转弯方式及原理图如表2所示。
除了表中列出的几种转弯方式外,还有单轮、两轮、五轮和以上机构等多种转弯方式。
对于支持和固定清扫机器人、传递运动和动力、控制运动方式、控制运动速度4个功能元,采用与求解转弯方式功能元相同的办法求解。
(1)支持和固定清扫机器人:履带式移动机构;腿足式移动机构;车轮式移动机构。
(2)传递运动和动力:圆柱齿轮传动;蜗轮蜗杆传动;带传动;链传动。endprint
(3)控制运动方式:两轮独立驱动;差动减速器驱动;前轮驱动前轮导向;全驱动。
(4)控制运动速度:圆柱齿轮传动;蜗轮蜗杆传动;带传动;链传动。
5.2 功能原理方案的形态学矩阵
功能原理方案的综合采用形态学矩阵。本系统的功能原理方案形态学矩阵如表3所示。
5.3 功能载体的选择
5.3.1 移动机构的选择
能够在平面环境中移动的机构形式主要有履带式移动机构、腿足式移动机构和车轮式移动机构[11]。
(1)履带式移动机构:着地面积比较大,与路面的黏着力也较强,其形态可以根据地形改变,所以能够在凹凸和松软路面上移动,比较适用于路面状况比较复杂的场合。
(2)腿足式移动机构:对步行的环境要求很低,既能在平地上行走,也能在非结构性的复杂地面上行走,对环境有很好的适应性。但其结构复杂,运动控制的难度较大,且运动的速度比较慢。
(3)车轮式移动机构:能高速稳定地移动,能量利用率高,机构简单,控制方便等[11]。
通过对比分析三种移动结构发现,本文设计的行走驱动系统工作于路面情况简单的场所,不需要那么复杂的结构;后者结构极其复杂,各种关节的设计要求都很高,对于简单的吸尘机器人来说显然会增加机器人的成本和加工难度,因此选用车轮式移动机构作为机器人的本体行走机构。
5.3.2 转弯机构的选择
轮式移动机构可按车轮数来划分一般有单轮、两轮、三轮、四轮和五轮以上等几种。其中单轮和两轮移动机构存在稳定性问题,需要陀螺仪来维持平衡,主要用来进行直立稳定移动控制问题的基础研究,而不是着眼于机器人移动机构的实用化问题,这里不再赘述;三轮和四轮移动机构比较常见,如果仅限于平地移动的话,三轮机构已经可以了,但考虑到高速移动时的稳定性问题,一般多采用四轮机构[12];五轮和五轮以上等特殊的移动机构与四轮移动机构相似,只是稳定性更强,但其结构要复杂的多。
综上所述,智能清扫机器人的转弯机构应采用四轮移动机构。
5.3.3 传动和控制运动速度机构的选择
常见的传动方式主要有圆柱齿轮传动、蜗轮蜗杆传動、带传动和链传动,下面对这4种传动方式进行分析比较。
(1)圆柱齿轮传动具有适应性广、传动效率较高等优点,但制造和安装精度要求高,成本高,从而提高了加工难度。
(2)蜗轮蜗杆传动具有很大的传动比,结构紧凑,传动平稳,噪声较小,并可改变传动方向[13]。
(3)带传动结构简单,成本低廉,具有缓和冲击、吸收振动的优点,但其主要适用于中心距较大的传动,传动外轮廓尺寸较大,且有弹性滑动和打滑[13],本文设计的行走驱动系统体积较小,故不宜采用带传动来传递动力和运动。
(4)链传动虽没有弹性滑动和打滑,且能保持准确的平均传动比,结构紧凑,安装精度要求较低,但其传动平稳性差,工作中有一定的冲击和噪声[13],与运行平稳安全这一设计目标相矛盾,故不宜采用链传动来传递动力和运动。
综合考虑传动效率、传动比、传动平稳性、加工难易度、成本、安全性能等多方面因素,传递运动和动力及控制运动速度最宜采用蜗轮蜗杆传动。
5.3.4 控制运动方式机构的选择
两轮独立驱动机构、差动减速器驱动机构、前轮驱动前轮导向机构、全驱动机构为比较常见的控制智能清扫机器人运动方式的4种机构,下面对这四种机构进行分析比较。
(1)两轮独立驱动机构:机器人的行进方向由两轮驱动机构的速度差值决定,通过对两个电机施加不同的速度可实现任意方向的驱动。这种结构的特点是运动灵活,机构组成简单;当两轮转速大小相等方向相反时,可以实现机器人本体的零半径回转,缺点是要求伺服驱动系统要求有足够的精度和优异的动态特性[14]。
(2)差动减速器驱动机构:导向控制电机通过减速器控制导向前轮,决定了机器人本体的运动方向。
这种移动机构和驱动系统传动效率较高,制造成本较低;但在传动模式上仍是机械传动模式,结构比较复杂,体积较大,质量也比较大,同时运动不灵活,不能实现机器人本体的小半径回转运动[14]。
(3)前轮驱动前轮导向机构:该机构中的前轮既是驱动轮又是导向轮,采用两个电机分别控制,导向电机控制前轮的转向角度,驱动电机控制前轮的旋转速度。
该种移动机构的特点是控制比较方便,能耗低,对于伺服系统和制造装备精度要求不高,而且旋转半径可以从0到无穷大连续变化;缺点是由于导向和驱动的驱动器均集中在前轮部分,复合运动结构设计复杂,而且车体本身的运动并不十分灵活[14]。
(4)全驱动机构:每个轮子均没有转向机构,只能进行前后方向上的旋转运动。机器人平台只能通过滑动转向方式进行方向控制,即完全靠两侧驱动轮独立驱动产生的速度差使车轮产生侧向滑动来完成转向操作。
因此,这种机构的致命缺点是转向损耗较大。该机构的优点是可以实现不同半径甚至原地零半径的转向,可以满足崎岖地形移动机器人的性能要求[14]。
综上所述,从体积质量,伺服驱动系统精确度,成本,运动灵活性,能否实现小半径回转,稳定度,控制简单,设计简单角度总观:应采用两轮独立驱动来控制清扫机器人的运动方式。
5.4 系统原理示意图
通过以上分析可知,在本设计中,机器人的总质量不是很大,考虑到清扫机器人的实际工作场合,采用四轮机构能满足要求,转向方式采用中间的左右两轮分别驱动、前后的万向轮随动的方式。通过中间的两个步进电动机带动蜗轮蜗杆传动,再进一步将运动传递到车轮。由于步进电动机是通过改变输入的脉冲频率来调速的,因此,对两个步进电动机输入不同的脉冲频率,就可以使两个驱动轮获得不同的速度,从而使机器人实现直线前进、后退和转弯等功能。行走机构原理示意图如图5所示。endprint
6 结构特点和使用领域
行走机构驱动系统由双步进电动机、蜗轮蜗杆、轴、驱动轮和万向轮组成。步进电动机和蜗杆通过联轴器相连接,动力经过蜗轮蜗杆的啮合运动传递,蜗轮和驱动轮安装在同一传动轴上,具有相同的转速,轴再通过键连接,从而带动两轮驱动,推动机器人运动。前轮不再采用传统的球式从动轮结构,而采用了应用非常广泛的双轴承万向轮,这既增加了运动的平稳性,又提高了转弯的灵活性。
本设计中的智能清扫机器人具有小型、平稳、灵活的特点,它将清扫机器人技术和吸尘技术有机地融合起来,适用于家庭、宾馆、办公室等室内环境场合的半自动或全自动清洁。
7 结语
本文設计的智能清扫机器人行走机构驱动系统体积较小,主要工作于家庭、宾馆、办公室等路况不复杂、路面平稳的场地,为机器人满足工作要求提供了结构上的保障,满足了运动方式、运动速度、自我保护等多种功能,与清扫机器人的其他组成部分有机配合,能达到很高的性能。
随着传感器技术、电子技术、计算机技术、人工智能等相关科学与技术的发展,成本低、功能强、智能化程度高、适应性强的自动清扫机器人将会很快出现并服务于社会,促进整个社会的经济发展。
参考文献
[1] 周盛荣.智能家庭清扫机器人的研究[D].哈尔滨工业大学,2006.
[2] 张超.智能清扫机器人设计及其路径规划的研究[D].哈尔滨工业大学,2012.
[3] 王军,苏剑波,席裕庚.多传感器集成与融合概述[J].机器人,2001(2):183-186.
[4] 王炎,周大威.移动式服务机器人的发展现状及我们的研究[J].电气传动,2000(4):3-7.
[5] 林红,翁桂荣.地面清扫机器人的研究[J].基础自动化, 2000(4):29-31.
[6] 马翔,朱世强,吴海彬.智能吸尘器的开发及设计[J].电子技术应用,2000(8):6-8.
[7] 蔡自兴.21世纪机器人技术的发展趋势[J].南京化工大学学报:自然科学版,2000(4):73-78.
[8] 周大威,高学山,王炎,等.全方位移动清扫机器人控制技术的研究[J].高技术通讯,2000(6):65-67.
[9] 袁曾任,高明.在动态环境中移动机器人导航和避碰的一种新方法[J].机器人,2000(2):81-88.
[10] 富历新,董春,相欣.微型直流电机驱动器的设计[J].微电机,1998(1):19-21.
[11] 王三武,刘进.清扫机器人移动驱动机构的研究[J].机械 制造与自动化,2008(5):105-107.
[12] 谈士力,沈林勇,陈振华,等.垂直壁面行走机器人系统研制[J].机器人,1996(4):232-237.
[13] 程光蕴,李仲生,钱瑞明.机械设计基础[M].6版.北京:高等教育出版社,2013.
[14] 三轮机构四轮机构[EB/OL].https://wenku.baidu.com/view/aa0f9647a8956bec0975e3f9.html.endprint
