Spar式风机基础系统水动力性能研究
2017-12-07蒙宣伊阳航
蒙宣伊,阳航
(湘电风能有限公司,湖南 湘潭 411100)
Spar式风机基础系统水动力性能研究
蒙宣伊,阳航
(湘电风能有限公司,湖南 湘潭 411100)
本文基于三维水动力学软件Aqwa进行了Spar式风机基础系统的水动力性能研究。通过时域方法,研究系统在额定风速工况下的运动响应。计算时考虑风浪联合作用的影响。最后通过傅里叶变换,得到升沉、纵摇、纵荡和锚链拉力响应谱。
Spar式基础;水动力性能;响应谱
海上风能被公认为是一种可以用来满足能量增长需求的可再生能源。相比海洋中其它可再生能源,比如潮汐能和波浪能,风能的开发及相关技术被认为是成熟的,而且建设相当好。其中大部分已建成并运行的风场主要是以固定式基础形式,而且水深比较浅。对于每个可能建成的风场来说,其取决于波浪和风特征、海床特性以及社会条件。在某一水深,选择使用何种基础时,主要考虑成本相关的问题。
相比传统固定式基础,漂浮式基础整体系统的性能研究是十分必要的,主要原因如下。
(1)它们的固有频率非常低,通常会影响气动阻尼和稳定性。
(2)对于半潜式和Spar来说,它们的位移和旋转运动会与机舱、叶轮的运动相互耦合。
(3)它们锚固在海床上的锚链系统必须包含在整体分析中。
Nielsen等对Spar基础整体动力分析进行了研究。他们对Hywind的基础进行仿真,并将结果与缩比模型的试验结果进行对比。Matsukuma和Utsunimiya采用多体动力学理论对一种漂浮式基础在恒定风速下考虑叶轮旋转时的运动响应。Jokman等在OC3项目中对固定式和漂浮式基础的结构动态响应进行了验证。Karmirad和Moan采用混合 aero-hydro-elastic时域方法进行了一种Spar式基础在极限情况下的结构响应研究。Karmake和Carlos等对采用长期预报方法进行了Spar和半潜式基础的运动响应对比分析。
本文给出了5MW风机的Spar基础的参数和外形,并进行了锚泊系统的建模。采用时域方法,将风机推力假定为一恒定力,计算系统在额定风速情况下的运动响应情况。通过傅里叶变换,得到各运动和锚链拉力的响应谱。
1 Spar基础模型和风机系统
Spar式风机系统包含Spar式基础、塔筒、机舱和叶轮。基础吃水为120m,其中底段浮筒直径为9.4m,长度为108m,过渡段上部直径为6.5m,长度为8m。基础平台的质量(包含压载)为7466330kg,重心高度为-45m。塔筒重量为347460kg,重心高度为海平面以上45m。叶轮重量和分布采用NREL5MW风机模型,总重量为350000kg,重心高度为90m(MSL)。系统重心为相对平均海平面(0,0,-62.82)。基础和风机模型参数如图1和表1所示。

图1 Spar基础及锚泊系统

表1 风机和基础模型参数
进行时域计算时,通过定义风推力系数,将风载简化为以某一推力作用在轮毂中心高度,即海平面以上90m。Spar基础和锚泊系统如图1所示。锚泊系统采用3根锚链互相成120度散布方式进行设计,导缆孔的位置在水下70m,计算水深为320m。锚链直径为0.09m,锚链总长为902.2m。锚泊系统具体见图1,具体参数如表2所示。

表2 锚泊系统参数
2 Spar基础数值分析
2.1 工况设置
基础结构的时域分析是运用Aqwa时域方法进行的,在计算时考虑恒定风推力对运动响应的影响。在额定风速工况下,风速为11.2m/s,有义波高为3m,谱峰周期为10s,风推力为720kN。计算所采用的波浪谱为Jonswap谱,其公式如式(1)所示:

式中:γ为升高因子,取值范围为1~3.3;
σ为峰形参数,若ω≤ωp时,σ=0.07,若ω>ωp时,σ=0.09;

计算步长设置为1s,总时长为3600s。
2.2 额定风速工况下运动响应分析
图2~4分别为基础在额定风速情况下的升沉、纵摇、垂荡和各锚链截面拉力的时历曲线。对图2~4来说,蓝线表示的是波浪作用下的响应,而红色为实际响应曲线。图2可以看出,基础的实际响应在风浪联合初始作用下产生一个约0.55m向下偏移。从图3看出,在风作用下,基础实际有一个2.5度的初始倾角,而且实际运动响应幅值是要大于仅考虑波浪作用时的响应。图4可以看出,基础在风作用下纵向会有8.78m左右的平均偏移。

图2 额定风速工况下升沉时历曲线

图3 额定风速工况下纵摇时历曲线

图4 额定风速工况下纵荡时历曲线
图5给出了3个方向的锚链截面拉力的时历曲线。其中1号锚链的方向为0度,因此该锚链所受的拉力要大于2、3号锚链。2、3号锚链由于基础系统的对称性,其所受的拉力时历曲线基本重合,因此图中用同一条曲线来表示。
2.3 响应频谱

图5 额定风速工况下各锚链截面拉力时历曲线
对于仿真得到的运动和拉力时历曲线,通过傅里叶变换,可以得到其响应频谱。图6~8分别为升沉、纵摇和纵荡的运动响应频谱。
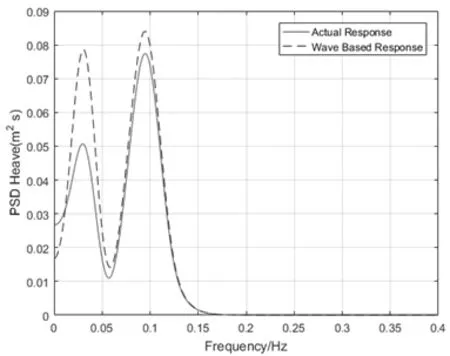
图6 升沉响应频谱
从图6可以看出,基础系统的升沉响应频谱存在两峰值点,左侧峰值处于系统升沉固有周期附近,右侧峰值对应频率处于谱峰周期所对应频率附近。波浪所诱导的升沉响应谱要略大于实际响应频谱。
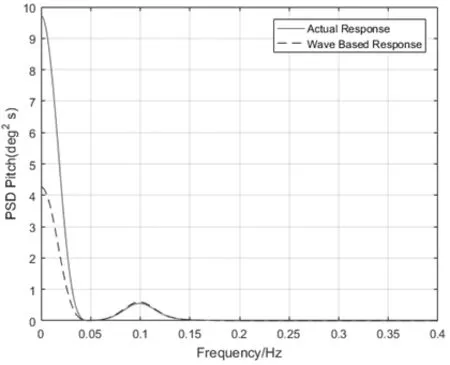
图7 纵摇响应频谱
从图7可以看出,无论是否考虑风推力,在谱峰周期附近有一个峰值点。在风推力的作用下,基础的实际纵摇响应要大于仅仅考虑波浪作用情况下的响应。

图8 纵荡响应频谱
从图8可以看出,实际的纵荡响应要略小于仅波浪作用下的情况。
图9为锚链张力响应频谱。从图上可以看出锚链1的峰值是要大于2、3号锚链。对于2、3号锚链来说,存在两个峰值,其中一个处于谱峰周期附近,另一个出于系统固有周期附近。

图9 锚链拉力响应频谱
3 结语
本文基于三维水动力学软件对Spar式风机基础系统的水动力性能进行了研究。从运动时历来看,在额定风速工况下运动响应比较小,性能比较优越。
在风、浪联合作用情况下,基础的运动响应谱存在双峰值,其中一个位于系统固有频率附近,另一个位于谱峰周期附近,这与实际比较吻合。锚链1的拉力响应大于锚链2、3的响应。
风推力对基础系统的响应频谱有影响。在风推力作用下,升沉和纵荡的实际响应要略小于仅波浪诱导的响应,而实际纵摇响应要大于仅波浪诱导的纵摇响应。
[1]Karimirad M., C. Michailides. V-shaped semisubmersible offshore wind turbine: An alternative concept for offshore wind technology[J]. Renewable Energy 85(2015)126-143.
[2]Breton SF, Moe G. Status, plans and technologies for offshore wind turbines in Europe and North America[J]. Renew Energy 2009;34(3):646-54.
[3]Shi W, Park H, Han J, Na S, Kim C. A study on the effect of different modeling parameters on the dynamic response of a jacket-type offshore wind turbine in the Korean Southwest Sea[J].Renew Energy 2013; 58:50-9.
[4]Shi W, Han J, Kim C, Lee D, Shin H, Park H. Feasibility study of offshore wind turbine substructures for southwest offshore wind farm project in Korea[J]. Renew Energy 2015; 74:406-13.
[5]Musial W, Butterfield S, Ram B. Energy from offshore wind[C]. Texas,USA: Offshore Technology Conference Houston; 2006. p. 1888-98.
[6]Myhr A, Bjerkseter C, Ågotnes A, Nygaard TA. Levelised cost of energy for offshore floating wind turbines in a life cycle perspective[J]. Renew Energy 2014; 66:714-28.
[7]Sun X, Huang D, Wu G. The current state of offshore wind energy technology development[J]. Energy 2012; 41:298-312.
[8]Nielsen, F. G., Hanson, T. D., and Skaare, B., 2006, Integrated Dynamic Analysis of Floating Offshore Wind Turbines[C].ASME’ Paper No. OMAE2006-92291.
[9]Matsukuma, H., and Utsunomiya, T., 2008, Motion Analysis of a Floating Offshore Wind Turbine Considering Rotor Rotation[J].IES J., Part A, 1(4), pp.268–279.
[10]Jonkman, J., and Musial, W., 2010, quot;Offshore Code Comparison Collaboration (OC3) for IEA Wind Task 23, Offshore Wind Technology and Deployment, National Renewable Energy Laboratory, Technical Report No. NREL/TP-5000-48191.
[11]Karimirad, M., and Moan, T., 2010, Extreme Structural Dynamic Response of a Spar Type Wind Turbine[C].’ASME’ Paper No.OMAE2010-20044.
[12]K.Bagbanci, D. Karmakar., C. Guedes Soares. Comparison of Spar and Semisubmersible Floater Concepts of Offshore Wind Turbines Using Long Term Analysis[J]. Journal of Offshore Mechanics and Arctic Engineering,2015,12, Vol.137.
[13]AQWA User’s Manual 2013. ANSYS.
[14]Design of Offshore Wind Turbine Structures. DNV-OS-J101. DNV.
P752 TK89
A
1671-0711(2017)12(上)-0162-04