基于HOG特征和滑动框搜索的地面油气管道检测方法
2017-12-06雍歧卫喻言家
雍歧卫,喻言家,陈 雁
(后勤工程学院 军事供油系, 重庆 401331)
基于HOG特征和滑动框搜索的地面油气管道检测方法
雍歧卫,喻言家,陈 雁
(后勤工程学院 军事供油系, 重庆 401331)
提出一种基于HOG特征和滑动框搜索的地面油气管道检测方法,能快速、高效、准确地检测高分辨率无人机巡线图像中的地面油气管道。该方法首先提取管道与非管道图像样本的HOG特征,由所得特征作为样本数据训练油气管道检测分类器。将训练好的分类器用在整张无人机巡线图像中自动检测油气管道,利用与样本管道图像尺寸一致的滑动框对整张无人机巡线图像进行扫描,提取滑动框中的HOG特征输入到已训练的分类器中判断该窗口是否为管道,并进行标记。为了验证提出方法的有效性,将此方法运用于235张高分辨率航拍图像上进行油气管道自动检测,检测精确率达到84.7%。
无人机;HOG特征;滑动框搜索;支持向量机;地面油气管道检测
油气管道巡线工作是实时进行的,要求无人机能够通过视频传回的当前帧图像,对管线进行识别提取,获取当前管线形状、位置等信息,与样本库数据对比,及时发现问题区域,准确定位事故位置,将信息快速传回地面站。传统的方法是利用巡线图像数据,制作正摄影图像与样本库图像匹配分析,需要无人机将整条线路巡查完毕后的整个环境图像数据及POS数据,同时需要专业后台软件长时间运行处理,否则无法达到实时巡线的效果。
利用无人机遥感对地面油气管道设备设施进行巡查,能够大大提高巡线效率,减少人员工作量[1-2]。方向梯度直方图(histogram of oriented gradient,HOG)特征是一种在目标检测领域应用较为广泛的特征描述子,最早运用在行人检测上,一般以HOG+SVM 的思路为主[3-4]。本研究考虑到地面管道在形状特征上一般为规则的圆柱体,管道边缘成规则的平行直线,而HOG特征对于有一定形态规律的目标能够较好地描述表达[5]。所以,本文采用HOG特征来描述油气管道,引入SVM支持向量机训练滑动框检测分类器[6],利用矩形框在图片上进行扫描,提取每个矩形框中局部图片特征,利用训练好的分类器通过特征匹配来进行油气管道识别。
1 HOG特征原理
HOG特征是法国学者Dalal等设计用于人体检测的特征,它能够通过梯度和边缘的方向密度分布对目标的表象和形状进行很好的描述,于2005年在CVPR会议上提出,在行人检测中取得了十分显著的效果[7]。
1.1 图像归一化
为了计算油气管道的HOG特征,通常要先进行图像归一化来使得光线均衡,本文采取伽马校正的方法。
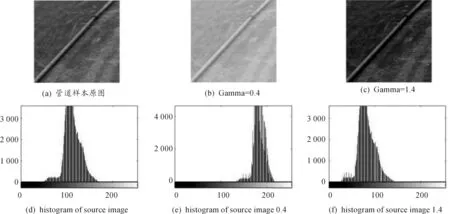
图1 gamma取0.4、1.4时的成像效果及灰度直方图对比
1.2计算图像梯度
计算图像梯度。图像的边缘特征与像素点梯度值大小成正相关,通常采用计算图像一阶导数的方法来获得梯度图像,见图2。还有一种变异的方法是用二阶图像导数作为基本块检测器,用来捕捉有用的特征。
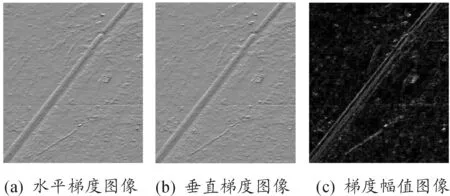
图2 垂直方向梯度图
1.3 分割图像
HOG特征是一种局部特征,需要对整张图像切块分割后分块提取,图像被分成均匀空间区域,称之为分割区块(cell)。每个区块的HOG特征可以表示该区块各方向边缘的强弱。对于图像分割的方式,分为overlap(区域交叠式分割)、non-overlap(区域不交叠式分割)两种。overlap是指分割的区域有重合,这样能避免将连续物体分割开,但会增加计算量;non-overlap与之相反,图3为某型无人机拍摄的管线样本图像的分割效果及cell、block和管线样本图(image)的对应关系。

图3 管道样本图像的分割效果
1.4像构建分割区块(cell)梯度方向直方图
将图像分割后,需要计算每个分割区块(cell)的方向梯度直方图,生成该区块的HOG特征编码。计算步骤为:统计每一个区块(cell)内所有像素的一阶梯度幅值和方向,按边缘方向把0~360°等分为若干类(bin),对每个像素点按梯度方向α(x,y)进行归类,采用像素点的梯度幅值对梯度方向α(x,y)进行加权投影,图4为分割区块内梯度方向统计图。
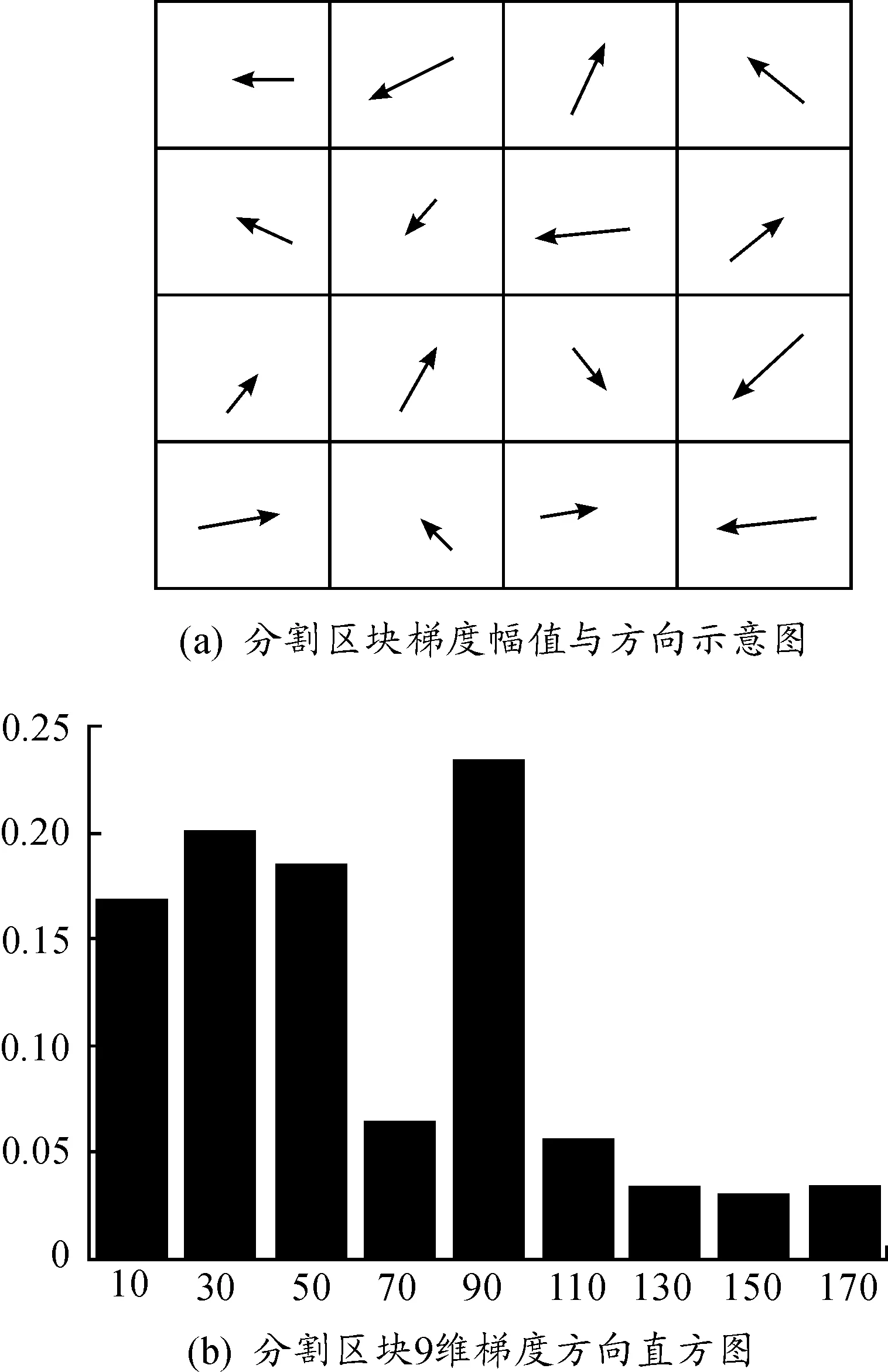
图4 分割区块内梯度方向统计图
1.5把分割区块(cell)合并为块(block)
把连在一起的分割区块(cell)按照一定规律合并大的块(block)。本文采用块重叠(overlap)的方法,这种方式可以通过块重叠对块边缘区域进行重新统计计算,从而达到块边界模糊的目的,使得处于块边缘部分的像素点被重新统计在图像特征中,使得HOG特征描述更加精确。
1.6 块内归一化梯度直方图
对block块内的HOG特征向量进行归一化,可以使最终得到的HOG特征向量对光照、阴影和边缘的一些变化具有更好的鲁棒性。本文采用的归一化函数为:

(1)
式中ξ为接近0的正数。最后将所有block对应的特征串联形成HOG特征,可以看出管道轮廓信息通过HOG特征能够很好区分。
2 基于HOG特征和H分量颜色直方图特征野战管线识别流程
首先采用切片的方式,对无人机巡线图像切取多张大小合适的管道样本,然后提取样本的HOG 特征与H分量颜色直方图特征进行SVM分类器[8-9]训练,最后将分类器运用到航拍图像的管道检测上,采取滑动框搜索的方法,选择与切片样本同样大小的滑动窗口,从航拍图像的左上方开始,按照规定间隔依次滑动,每滑动一次都对窗口内的图像块进行判断,是管道就进行标记,不是则跳过检测下一个窗口。为了缩短扫描时间,实验采用了跳跃式扫描法,在保证全面扫描的情况下,尽量使滑动间隔达到最大,管线目标的识别算法流程图如图5所示。
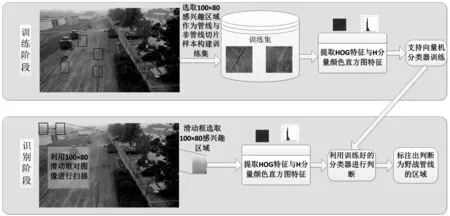
图5 管线目标的识别算法流程
3 实验设计及结果分析
3.1 实验数据
作者利用某型无人机对输油管道进行了巡线模拟实验,共拍摄巡线视频19 min,利用视频抽帧的方法提取图片 2 000余张,实验拍摄图像为3 840×2 160的JPG格式。
3.2 分类器训练集
从实验巡线图像中随机选取部分图像,根据实际成像效果,样本块的大小设置为100×80,利用切片法切取管道样本和非管道样本,所选取的样本管道大多位于图片块的中心位置。整个训练集有油气管道样本798张,如图6所示,非管道样本1 342张。
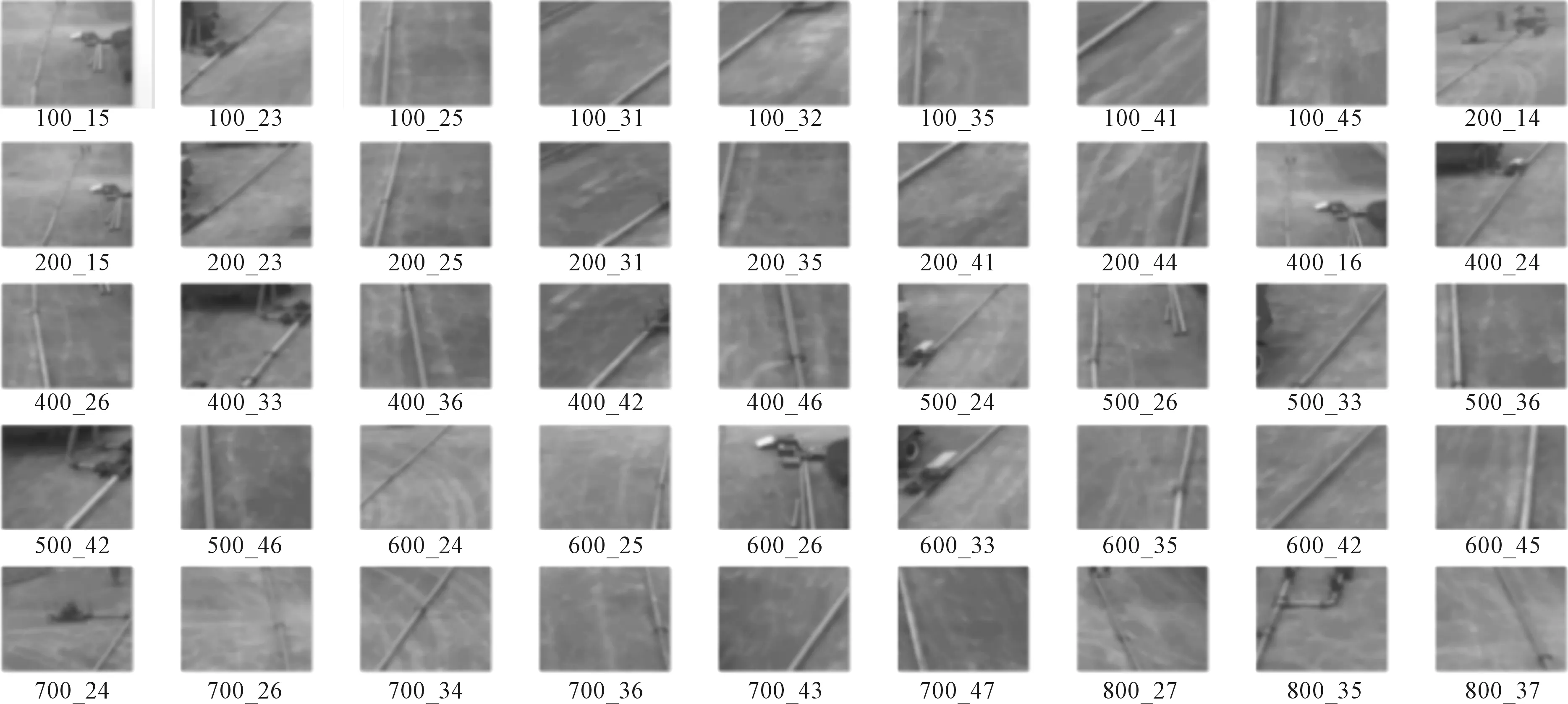
图6 油气管道样本图
3.3遗传算法SVM参数寻优仿真实验
遗传算法(genetic algorithm,GA)是一种生物学的进化寻优算法,从多点开始,通过复制、交叉、变异的操作来进行参数寻优。将遗传算法运用到管线识别分类器的参数优化中,寻找识别性能最好的惩罚参数C和RBF核参数g。本文按照上述方法,利用400个管线切片样本与非切片样本作为训练集进行仿真实验,得到的适应度曲线如图7所示。
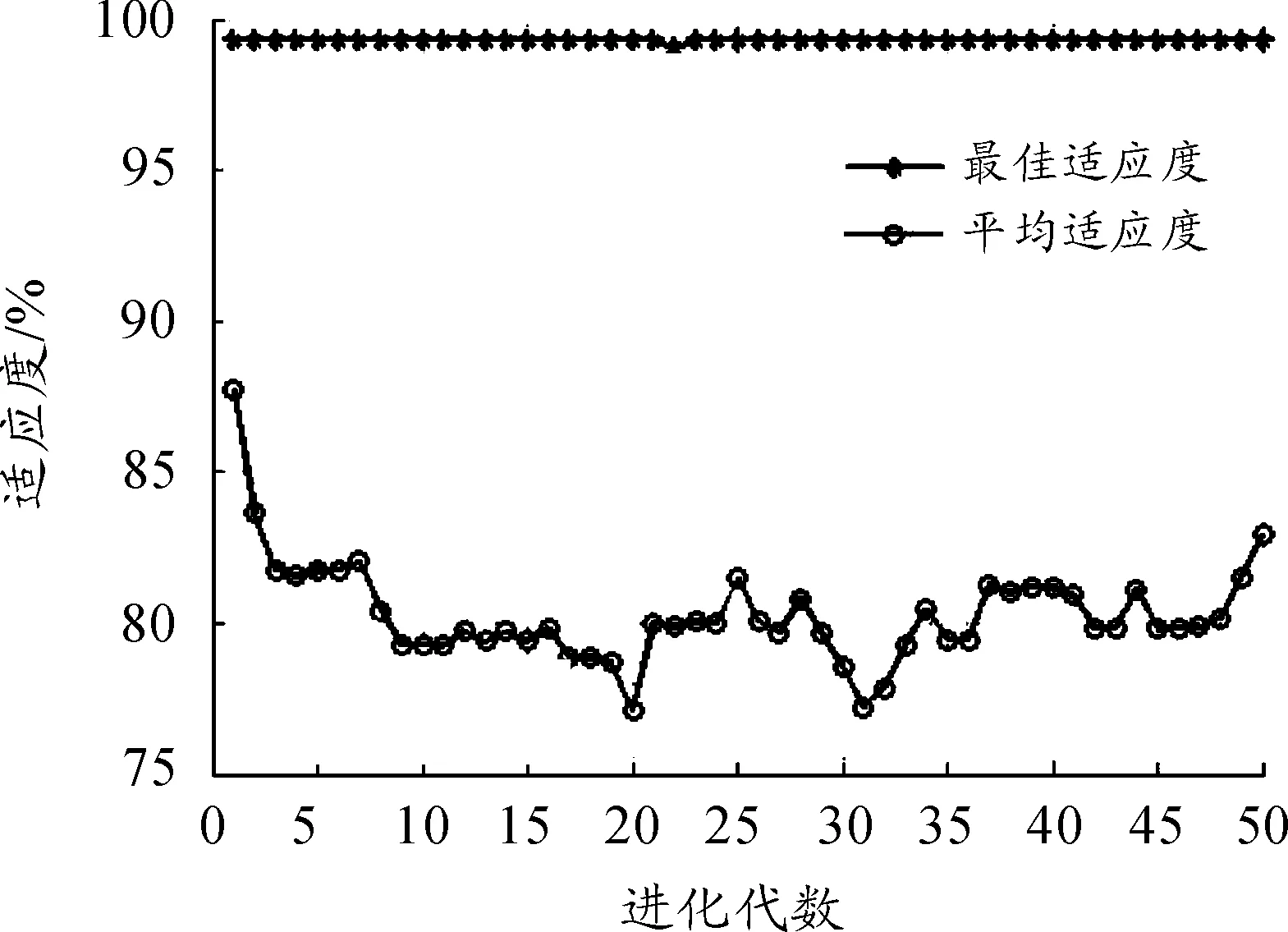
图7 SVM分类器迭代过程适应度曲线
SVM分类器巡线HOG特征样本最优参数为:Bestc=4.591 9,Bestg=0.479 08,在该参数下的最优适应度为99.289 1%。
3.4 评价方法
针对管道识别效果的评价, 采用准确率(Precision)、平均检测时间(T)这两个指标来衡量,好的识别算法应该在保证识别准确率高的同时,检测时间更短[10]。其中Precision、T分别定义为:
(2)

(3)
式中:TP表示为检测正确的野战管线图像数量;FP检测器错的管道图像数量;Precision即指检测正确图像数与检测出的全部图像数的百分比;ti表示检测第i张图像时所用时间;T表示检测全部图像所用的平均检测时间。
3.5 实验结果及分析
实验对235张测试无人机巡线航拍图进行检测,取得了较好的检测结果:准确率达84.7%,检测时间为2.1 s。从检测结果来看,利用HOG特征训练SVM分类器,并以“矩形的视角”来描述油气管道目标,通过滑动框搜索实现油气管道定位标记,该方法简单易实现,可以灵活运用图像分类中各类特征、相似度量算法与之结合。但是矩形窗体内包含了许多背景的信息,从而会对判定造成不利的影响;并且样本尺度要与滑动框尺度一致,对于不同尺度下的图像,需要采集不同样本训练不同尺度下的分类器,计算量较大,管道识别效果如图8所示。

图8 管线识别效果图
4 结束语
利用无人机遥感技术对石油天然气设备设施进行巡查维护,有利于节约人力成本,保障设备安全。本文针对无人机巡线条件下的油气管道识别问题,提出了基于 HOG 特征和滑动搜索框的油气管道检测方法,为无人机智能化巡线提供一种新的思路。本方法的优点为:利用油气管道边缘方向平行的特点,采用HOG特征对油气管道进行描述,特征的鲁棒性强;通过滑动框搜索与分类器判断实现油气管道定位标记,方法简单、易实现,可结合多种特征训练多个分类器,对各类目标进行检测(如油气泄漏、设备损坏等)。不足之处就是矩形框内背景噪声干扰大,存在误检漏检,需要作进一步研究改进。
[1] 李器宇,张拯宁,柳建斌,等.无人机遥感在油气管道巡检中的应用[J].红外,2014(3):37-42.
[2] 常文见,孟凡辉,王仓,等.无人机遥感技术在长输管道中的应用探讨[J].价值工程,2013(32):197-198.
[3] 慕春雷.基于HOG特征的人脸识别系统研究[D].成都:电子科技大学,2013.
[4] 徐超,高梦珠,查宇锋,等.基于HOG和SVM的公交乘客人流量统计算法[J].仪器仪表学报,2015(2):446-452.
[5] 向征,谭恒良,马争鸣.改进的HOG和Gabor,LBP性能比较[J].计算机辅助设计与图形学学报,2012(6):787-792.
[6] 张伐伐,李卫忠,卢柳叶,等.SVM多窗口纹理土地利用信息提取技术[J].遥感学报,2012(1):67-78.
[7] SURHONE L M,TENNOE M T,HENSSONOW S F,et al.Histogram of Oriented Gradients[J].Betascript Publishing,2016,12(4):1368-1371.
[8] 邓乃杨,田英杰.数据挖掘中的新方法——支持向量机[M].北京:科学出版社,2005.
[9] 陈冰梅,樊晓平,周志明,等.支持向量机原理及展望[J].制造业自动化,2010(14):136-138.
[10] 徐宁,何文军,吴新忠,等.血液白细胞图像自动识别系统性能评价方案的设计与应用[J].临床检验杂志,2013(1):76-77.
(责任编辑杨黎丽)
GroundOilandGasPipelineDetectionMethodBasedonHOGCharacteristicandSlidingBoxSearch
YONG Qiwei, YU Yanjia, CHEN Yan
(The Military Supply Department, Logistical Engineering University, Chongqing 401331, China)
A ground oil and gas pipeline detection method based on HOG features and sliding frame search is proposed, which can detect the ground oil pipeline in the high resolution unmanned aerial vehicle (UAV) patrol image rapidly, efficiently and accurately.The method firstly extracts the HOG features of the pipeline and non pipeline image samples, and uses the obtained features as the sample data to train the gas pipeline detection classifier.The trained classifier is used for automatic detection of UAV pipeline images. And using a sliding frame with a certain size to scan the whole patrol line image of the UAV, it extracts the HOG feature in the sliding box, and inputs it into the trained classifier to determine whether the window is a duct and mark it. In order to verify the effectiveness of the proposed method, this method is applied to automatic detection of oil and gas pipelines on 235 high resolution aerial images, and the detection accuracy is 84.7%.
UAV; HOG characteristics; sliding frame search; support vector machine; ground oil and gas pipeline detection
2017-08-16
国家自然科学基金资助项目(51475469)
雍歧卫(1967—),男,四川南充人,硕士,教授,主要从事石油与天然气工程研究,E-mail;270245904@qq.com,通讯作者 喻言家(1993—),男,湖南岳阳人,硕士研究生,主要从事石油与天然气工程研究,E-mail:270245904@qq.com。
雍歧卫,喻言家,陈雁.基于HOG特征和滑动框搜索的地面油气管道检测方法[J].重庆理工大学学报(自然科学),2017(11):192-197.
formatYONG Qiwei,YU Yanjia,CHEN Yan.Ground Oil and Gas Pipeline Detection Method Based on HOG Characteristic and Sliding Box Search[J].Journal of Chongqing University of Technology(Natural Science),2017(11):192-197.
10.3969/j.issn.1674-8425(z).2017.11.029
TP391
A
1674-8425(2017)11-0192-06
