基于无人机的交通事故现场快速制图及归档系统构建
2017-12-06郑渊茂何原荣姚诚鑫
郑渊茂,何原荣,冷 鹏,姚诚鑫
(1.厦门理工学院 计算机与信息工程学院, 福建 厦门361024;2.福州大学 a.福建省空间信息工程研究中心; b.空间数据挖掘与信息共享教育部重点实验室, 福州 350002)
基于无人机的交通事故现场快速制图及归档系统构建
郑渊茂1,何原荣1,冷 鹏2a,2b,姚诚鑫1
(1.厦门理工学院 计算机与信息工程学院, 福建 厦门361024;2.福州大学 a.福建省空间信息工程研究中心; b.空间数据挖掘与信息共享教育部重点实验室, 福州 350002)
以交通事故现场为研究对象,基于无人机拍摄的高分辨率正射影像,在ArcGIS和CASS软件中处理绘制交通事故现场记录图和现场图,并在勘查时间、精度等方面与传统方法进行对比,验证无人机在交通事故现场勘查的巨大优势。其次,在ArcGIS Engine Runtime 等平台基础上,设计交通事故现场勘查数据的管理系统,对事故发生位置、正射影像图、事故现场图等大量现场勘查数据进行分类管理及分析查询。结果表明:无人机应用于交通事故现场的方法及归档系统的构建,不仅可进行交通事故现场快速勘查制图、缩短勘查时间,还便于勘查数据的管理查询,为国内外交通事故现场快速勘查及数据归档提供可借鉴的经验。
无人机;交通事故现场;快速制图;Visual Studio平台;归档系统
交通事故发生后,及时进行交通事故现场的勘查,分析事故发生的原因,对今后做出有效方案来降低交通事故发生频率具有重要意义。在交通事故现场存在大量客观的数据,是整个交通事故原因分析的真实表现,可进行事故勘查,判定责任方。因而,交通事故现场的勘查越来越受到公安及保险部门的重视[1]。
交通事故现场勘查应尽可能减少勘查时间,避免长时间对道路采取封闭措施。传统的交通事故勘查方法是用手工皮尺或全站仪测量,手工绘制现场草图及现场比例图,交通状况复原后,不能对现场再次查看,给事故责任判断造成很大麻烦[2-3],存在测量精度低、勘查时间较长,需大量的人力及物力,还造成交通堵塞[4]。因此,如何快速、准确地进行道路交通事故信息的完整获取已迫在眉睫。利用无人机航拍可快速、高清晰度地获取交通事故现场影像,经处理后的影像数据包含经度、纬度、高程信息,在空中有着较好的视角,能获取在地面无法量测的数据信息以及视频,可作为日后事故分析查证的有力依据,还可避免传统事故在勘查时需封闭道路而造成的二次伤害以及耗时、存在漏测等不足[5]。
近年来,无人机的应用领域不断增多,在交通领域也得到广泛应用[6-11]。Doherty等[6]对无人机运行在道路和轨道网络进行了成功部署,推动了无人机软硬件等结构发展。Puri等[7]利用无人机获取实时详细交通信息,增加数据获取新技术,便于管理人员对数据统计分析,该数据还有助于交通仿真监测。Lee等[8]采用四轴无人机对交通监控和道路事件监控进行适用性研究,与传统方法相比,无人机在大区域数据采集方面具有高效性和效益性。陈强等[9]为解决交通事故现场二维勘测中“四点法”不足和实际问题,提出基于小型无人机摄影测量的“改进四点法”,增强勘查效果。彭博等[10]对无人机的视频检测算法评价,并对事故现场的复杂环境及空中管理等进行讨论。赵国朋[11]探索建立“以无人机拍摄为核心,其他勘查手段予以辅助”的高速公路交通事故现场勘查新模型,达到安全、高效、便捷的交通事故现场勘查。这些研究工作已取得较好的成果,但到目前为止,尚无有关构建无人机应用于交通事故现场勘查及数据归档系统管理的报道。
本文以交通事故现场勘查为研究对象,基于无人机拍摄的高分辨率正射影像,在ArcGIS和CASS软件中处理绘制交通事故现场图,并在勘查时间、精度等方面与传统方式进行对比、分析。此外,设计交通事故现场数据管理系统,对事故发生的位置、航拍影像图、现场图等大量现场勘查数据进行管理查询,能够为国内外交通事故现场快速勘查提供借鉴。
1 交通事故现场信息数据获取
1.1 无人机航拍技术
无人机是指具有动力装置,不载操作人员,携带多种设备,执行多种任务,并能重复使用的无人驾驶飞行器[12]。根据飞行器整体构造可分为固定翼无人机和旋翼无人机两大类。固定翼无人机飞行速度快,航拍范围广,工作效率高,但对工作环境要求高,必须在空旷的作业环境才能发挥较高的工作效率,对起飞和降落要求高,不够灵活[13];旋翼无人机具有机动灵活性,起飞降落要求场地空间不大,航飞高度较低,可以悬停,还能按照预设的航线实现各类不同需要的飞行效果,适合对交通事故现场进行快速信息获取[14-15]。因此,本文采用“DJI Inspire 4”型四旋翼无人机,其飞行性能强,容易操控且安全平稳。
在交通事故现场勘查中,无人机摄像头可获取大范围的影像,有助于事故勘查取证并进行事故分析、责任认定。运用无人机航拍技术,在事故现场短短几分钟的勘查,可获取必要数据,并使道路快速恢复畅通,在交通事故多发地区,往往容易引起连环事故,严重地会导致交通封闭,一旦事故发生,需耗费较长时间及大量人力、物力来解决,而无人机则可快速完成事故现场勘查,从而大大节省时间。
1.2 事故现场信息采集
1.2.1 事故现场踏勘
本文的交通事故现场是模拟一个校园内十字路口处,无红绿灯,车流量小,其路口处存在视线遮挡,属于典型的交通事故易发现场。布置一辆白色面包车与一辆蓝色小轿车在道路碰撞,模拟两车发生刮擦场景。无人机航拍对天气要求比较严格,晴朗的天气在很大程度上可确保影像成果的质量。云层的厚度、太阳光照的强度、空气能见度等均是影响航拍影像成果质量的重要因素。避免大雨大风天气,适合航拍的晴天有助于提高航拍影像质量。
因此,在获取影像数据前需做好准备工作,并进行现场踏勘。首先,查看交通事故现场区域的地形地势以及天气状况。城市地区道路交通事故现场周围大都有建筑物,需要注意查看是否有较高层建筑物影响无人机的航行;在山区,需注意周围的高山等山脉是否影响无人机飞行;其次,踏勘确定无人机的起降地点。无人机起飞地点有条件要求,尽量选择平坦的空旷场地作为无人机起降地点,远离高压电线、高层建筑物、高大树木、大型广告牌等可能对无人机起飞造成干扰的障碍物;最后,还要对交通事故现场的风速进行测定,正常情况下无人机可抵抗6级风速,超过限制风速会对无人机飞行造成干扰,可能发生危险,要确保在安全的风速限度内工作。
1.2.2 影像数据获取
无人机航拍获取数据主要包括资料收集与整理、航行场地选择、航行方案设计、起飞前和降落飞行设备系统检查、航行质量监控、影像质量检查及航行资料整理等,如图1所示。
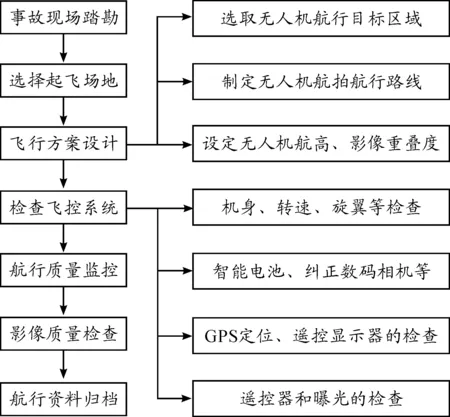
图1 数据获取流程
无人机进行影像数据采集过程如下:① 航拍工作前需要进行准备工作,确保无人机智能电池、显示器等充满电量,并确保螺旋桨、陀螺仪等各部分安全,特别是无人机的动力系统作为无人机的重要组成部分,需保证其工作安全;② 确定无人机起飞场地。经过现场踏勘后,本次无人机起降地点选在道路边缘的空旷平坦草坪上;③ 进行无人机航行路径的规划,确定航拍范围及架次以及航行的顺序。本文采用Altizure APP软件控制“DJI inspire4”四旋翼无人机的航行路线。在航行路线规划中设定无人机航线路径、起降地点、航行高度、无人机航行速度等参数,界面如图2所示;④ 无人机航行质量监控。在飞行中需进行飞行数据的实时监测,包括航行高度、航行速度、航行轨迹等;⑤ 影像质量的检查。在无人机影像数据获取后及时查看数据质量成果,以及无人机是否受损等。

图2 采用Altizure APP设置无人机航线界面
2 事故现场快速勘查制图
2.1 事故现场数据处理
本文采用Pix 4Dmapper软件来快速、高精度地生成数据测区完整的影像。主要步骤为:
1) 原始资料数据的获取。检查影像数据是否完整、影像的POS数据是否齐全,保证影像数据的质量和完整性,避免存在不合格的影像图,检查影像的经度、纬度和高程可靠性;
2) 建立新工程并导入相关数据。导入无人机航拍的遥感影像图,影像经纬度、姿态角以及数码相机信息,并设置影像的坐标系为“WGS84(经纬度)坐标系”且带有POS数据。
3) 影像空间三角解算。完成新工程的创建后,开始运行影像数据处理,会根据导入的影像图及影像图信息进行自动识别处理,可进行影像图空中三角测量,并获取各个影像的外方位元素。影像图进行空中三角解算相应的坐标信息,如图3所示。
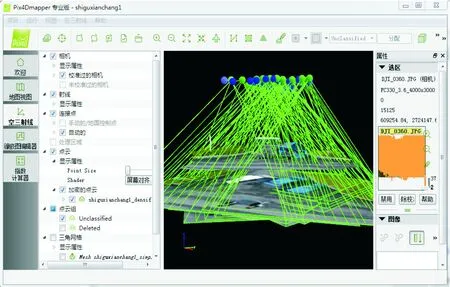
图3 空中三角测量解算
4) 生成影像图处理质量报告。无人机航拍的遥感影像图经过处理后可生成质量报告,输出一份PDF文件。在质量报告中,重点查看数据集和相机的参数优化质量这2项指标。本次的数据处理结果中,相机的初始焦距与空间三角形处理运行结果得到的相机焦距两者之间的差值为2.77%,小于5%。相机模型无错误,成果质量合格。
5) 自动生成DSM模型,进行影像校准拼接。该软件根据空中三角测量计算出影像的内外方位元素和交通事故现场区域的测区的数字表面模型(Digital Surface Model,DSM),对无人机遥感影像进行正射影像校正,经校正后生成具有真实地理坐标的正射投影影像图;并对各个遥感影像图进行镶嵌,生成完整的正射影像图数字正射影像图(Digital Orthophoto Map,DOM)。本次事故现场的数字表面模型DOM和DSM概略如图4所示。
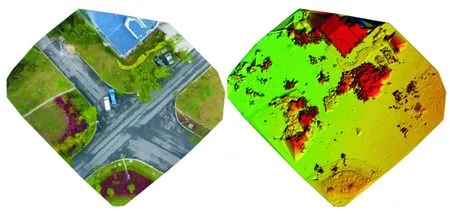
图4 DOM和DSM概略图
2.2 事故现场图绘制
在交通事故的勘查中,交通事故现场记录图的绘制必不可少。交通事故现场图主要有现场记录图和现场比例图。现场记录图重点描述交通事故现场的环境,包括交通肇事车辆及相关车辆人员,现场有关物品等的位置。现场比例图能更加具体、准确地表现出事故现场,整齐细致地依照规范的图形表示符号按一定比例绘制交通事故现场平面图。交通事故现场的比例是指图中的线性元素的尺寸与现场实际中对应的尺寸之比。把交通事故现场中的道路线、地面物体、车辆人员、地面痕迹以及它们彼此之间的距离依照一定比例,缩小显示到图纸上,通常选用1∶500、1∶200等比例尺,根据实际情况决定。
2.2.1 事故现场记录图的绘制
事故现场记录图是指在进行交通事故现场勘查时,重点描述事故现场周围的环境状况,对事故现场环境、车辆形态,有关车辆、人员、物体、痕迹的位置及相互关系的图形标记。事故现场记录图绘制是在ArcGIS软件中目视解译完成。首先,将处理后的交通事故现场正射影像图导入ArcGIS软件;其次,建立MDB数据库,在数据库下新建交通事故现场各类信息的要素类,如图5所示。交通事故现场各要素主要有:道路边界线、路灯要素、道路排水盖要素、事故车辆要素、车辆行驶轨迹要素、房屋建筑要素、道路绿化要素等;在软件中可根据正射影像图,对事故现场的各类相关信息包括道路边线、交通设施、路灯设备、事故车辆等要素进行矢量化提取,最终得到交通事故现场记录图的快速绘制,如图6所示。
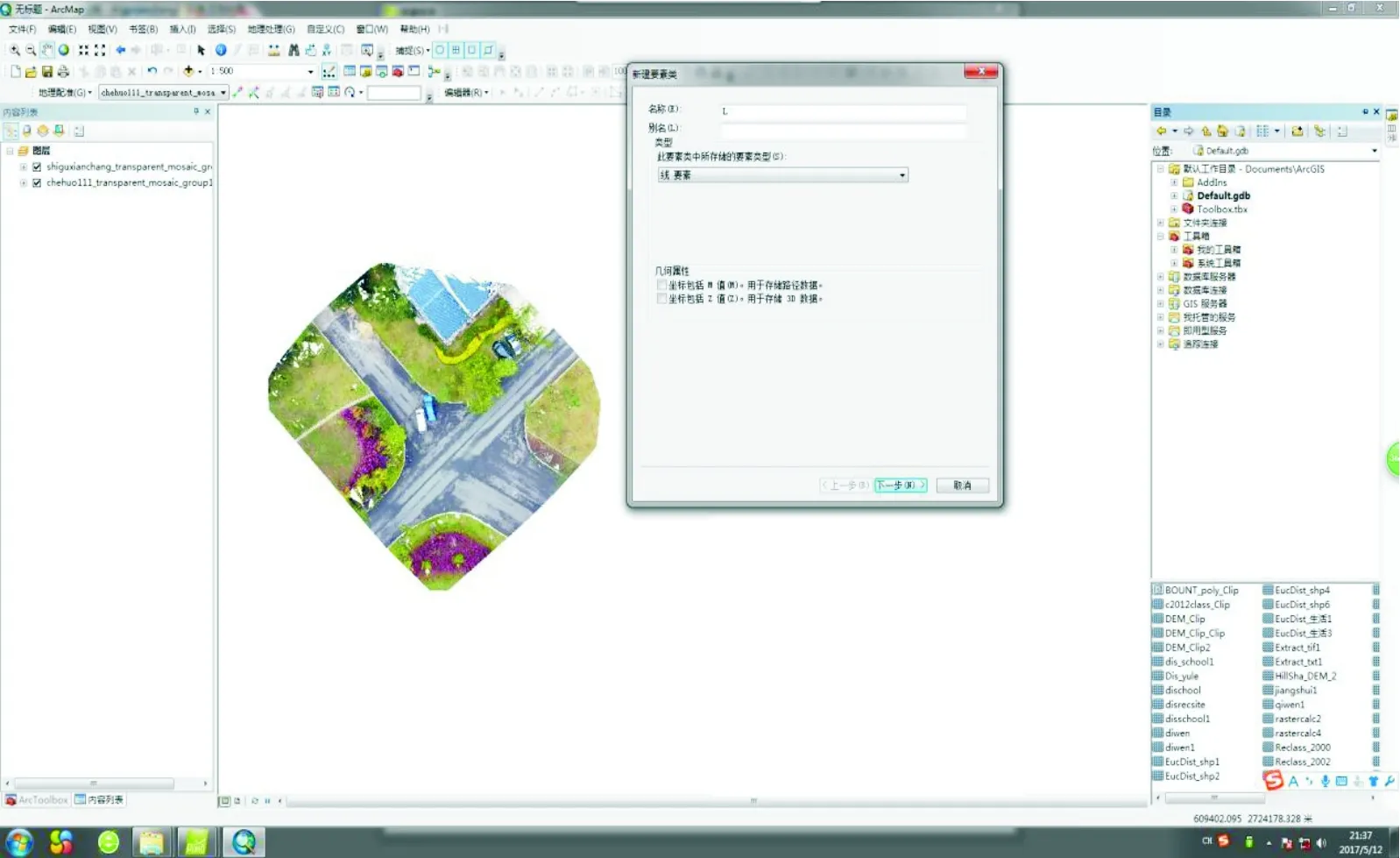
图5 建立交通事故现场各要素MDB数据库
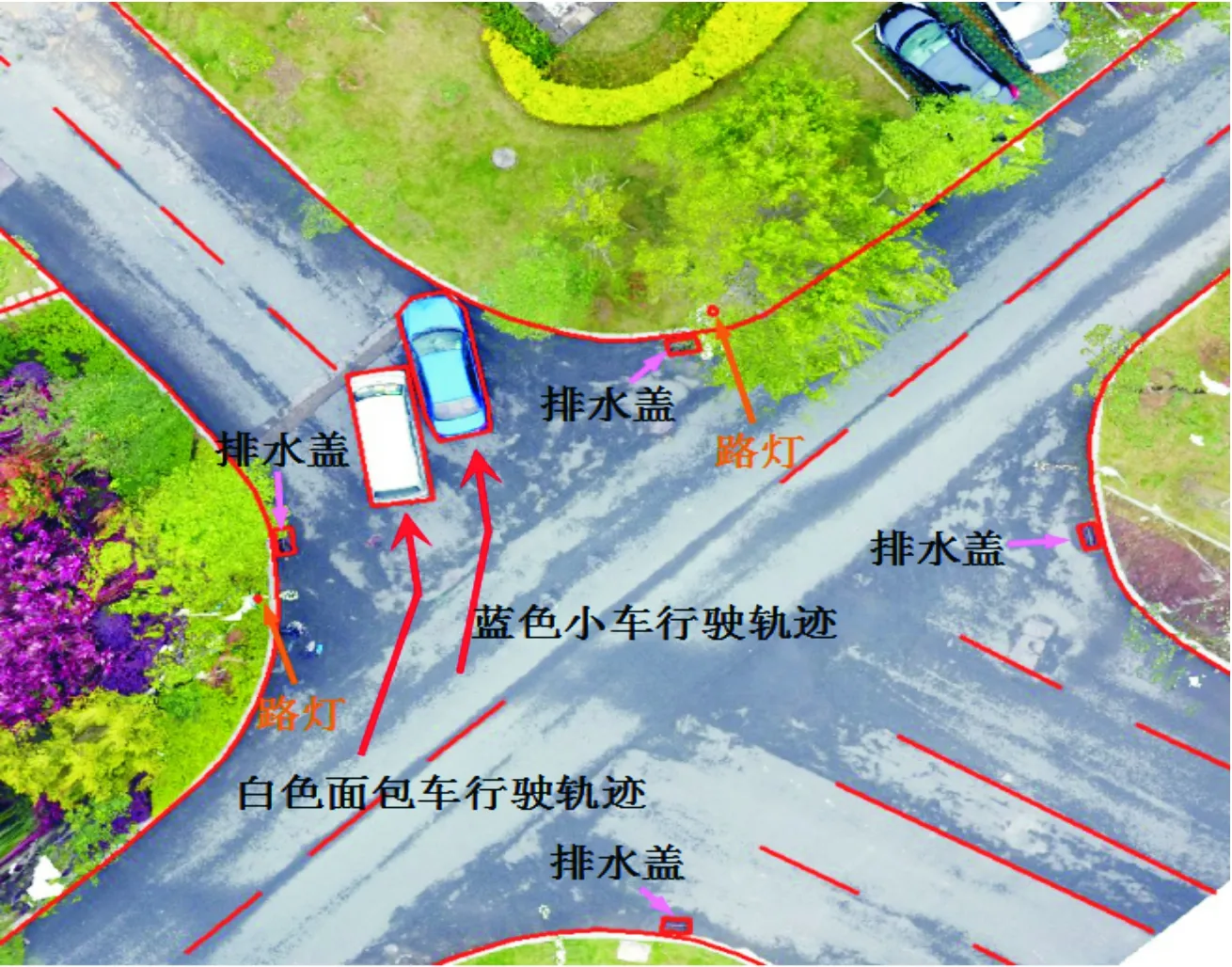
图6 交通事故现场记录图
2.2.2 事故现场比例图的绘制
在交通事故现场比例图的绘制中,现场定位是关键的一步。现场定位包括现场的方位、道路走向及各个目标对象的几何空间位置。现场定位可通过方向的确定、基准点和基准线的选取、建立坐标系等方式来实现。交通事故现场方向定位中最主要的是确定道路边线的走向。在图上标明正北方向,确定道路线段与正北方向的角度,就完成了道路的定向。同时,在事故现场选取几个特殊地物作为基准点来确定车辆、人员与基准点的相对位置。基准点应就近选择,方便量算距离并标注,选取长久有效、结实牢靠的点位,比如道路里程碑、路边电线杆、路灯、交通指示杆等。其次,确定基准线,基准线往往是选取道路两条边线或道路边的路沿实线。通过基准点和基准线,可对事故现场的车辆进行定位,明确物体与基准线的距离。
根据现场的不同情况可采取不同的定位方法,定位方法有:直角坐标定位法、交会定位法、三边定位法、三角定位法和极坐标定位法等。应根据具体情况选取最合适的方法。本文通过交会法进行事故车辆的定位。本文事故现场比例图是采用AutoCAD开发的CASS软件进行绘制。首先,在CASS软件中导入交通事故现场记录图,同时根据勘查人员在交通事故现场记录的数据,按照一定的交通事故现场符号和制图比例尺对交通事故现场各目标对象进行定位,最后绘制交通事故现场比例图,如图7所示。
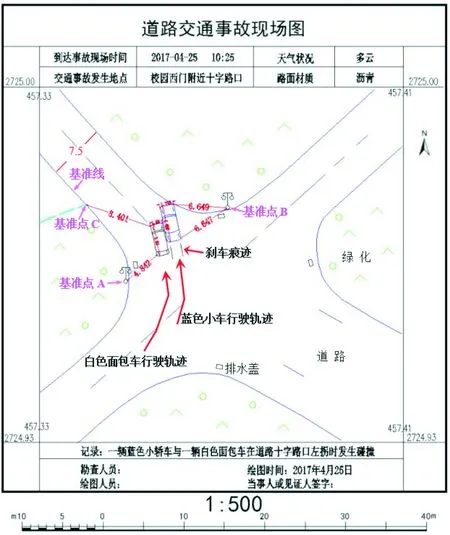
图7 道路交通事故现场图
从本次交通事故现场比例图可得以下信息:
1) 根据事故车辆刹车的痕迹及车轮方向等因素,可判断并具体地绘制出两辆事故车辆的行车轨迹及方向,便于勘查人员快速进行事故现场分析。
2) 从图中可观察:此道路十字路口左上方向路口宽度最小仅为7.5 m,同时在道路左边存在大量绿化植被,道路路口通视率低,最终可判断两车辆在道路左拐弯时,因路面过窄以及视线遮挡而造成碰撞刮擦车祸的情况。
3) 从图中可具体量测得到蓝色小车右上方顶点距离基准点B的距离为6.649 m,右下方顶点距离基准点B的距离为6.647 m;白色面包车左上方顶点距离基准点C的距离为8.401 m,左下方顶点距离基准点A的距离为4.842 m。通过基准点和基准线及方位距离,可精确确定出事故车辆的具体点位。
4) 从图中还可精确提取道路排水盖及井盖的位置坐标及宽度大小,同时获取道路两旁的绿化准确区域,为交通现场事故进行事故原因分析提供精确的数据来源和支撑。
2.3 效益对比
通过无人机航拍获取事故现场影像数据,可快速制图,大大提高交通事故现场勘查的效益,具有极大的优越性和效益性。基于无人机航拍技术进行事故现场勘查时间,由传统人工勘查的30 min缩短至约8 min;同时,无人机航拍技术可获取地面人员难以获取的俯视角,使交通事故现场勘查数据更为丰富,更具完整性。此外,无人机航拍技术获取事故现场影像图还可避免数据漏测、测错,其数据可二次查验,数据采集与处理实现自动化,数据客观、精确,减少了人力和物力。无人机航拍技术与传统交通事故现场勘查方法的对比,如表1所示。
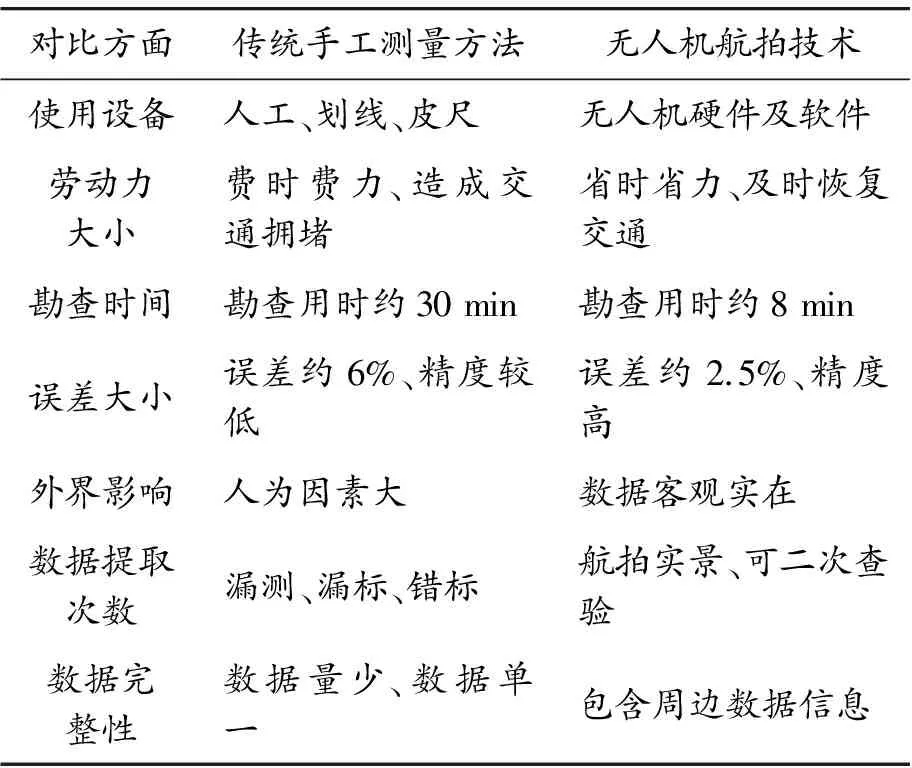
表1 交通事故勘查方法对比
3 交通事故现场勘查归档系统的构建
3.1 系统功能组成
通过无人机航拍获取事故现场数据,并快速精确地获取交通事故现场图,可大大提高现场勘查的效益。利用无人机航拍技术,可获取交通事故发生位置、航拍影像图、现场图等大量现场勘查数据。因此,交通事故管理人员对于交通事故现场勘查繁重的数据进行归档管理有迫切的需求。本文研究的交通事故现场勘查数据的归档系统操作简单,不仅可快速进行交事故现场勘查数据和分析结果的完整录入管理以及各数据的精确查询,便于事故管理人员的数据管理,还可为制定降低交通事故措施提供数据来源支撑。本研究系统的功能主要有:
1) 对交通事故现场信息进行采集与存储、修改及添加。交通事故现场记录图、现场比例图等勘查数据导入,以及交通事故现场天气、时间、地点及周围环境的输入。
2) 信息的查询与反馈,以及交通事故分析结果的输出,包括交通事故发生原因的分析和改进措施的输出。
3) 数据库信息更新。对交通事故现场的勘查处理结果进行实时数据更新,并检验勘查结果的准确性。进行勘查数据归档的不断更新,为交通事故管理人员提供更全面、完整、准确的数据系统,也为道路交通安全的分析提供依据。
交通事故现场勘查归档系统中数据多样,包括地图、事故现场的航拍正射影像图、视频文字记录。交通事故现场勘查数据具有重要性,表现在数据透明公正、保护权益、二次调档,特别是重大交通事故,保证有充分的信息。交通事故勘查数据归档是一个相对复杂的过程,主要是其数据量大、数据结构复杂,与地理空间数据和属性数据关系密切,而GIS又具有功能齐全的空间数据分析和与专业模型相结合的能力。因此,结合 GIS技术开发归档系统,为事故分析提供可视化信息,为事故责任认定提供可视化判定参考,具有重要的实际意义。鉴于现有成熟系统开发较少,基于GIS技术的交通事故现场勘查归档系统仍需不断深化研究。
3.2 系统结构设计
3.2.1 需求设计
本文的交通事故现场勘查归档系统研发的主要目的是统一归类管理交通事故现场勘查数据。① 将每一起交通事故现场的编号、无人机航拍的正射影像图、交通事故现场记录图、事故现场比例图、现场记录的信息以及视频等信息采集到该系统;② 通过信息采集,使各类事故勘查信息整合在一起,可进行分类查询管理,有助于每一次交通事故勘查结果的管理和整合归档入库;③ 还可对勘查的结果进行数据下载及查询,包括事故现场视频等;④ 在交通事故信息核查栏中,可确认现场勘查信息是否完整,勘查统计数据是否准确。
3.2.2 功能模块设计
交通事故现场勘查数据归档系统的功能模块,主要定位在数据信息采集、浏览查询与数据管理功能上,具体包括遥感图像浏览、数据分类查询、图形数据传输等功能。根据系统功能的总体设计,可将系统设计为以下几个部分:
1) 事故信息模块:可进行数字化图形处理,完成对无人机遥感影像图、交通事故记录图、现场图,事故现场车辆、行人信息的导入采集,是快速处理道路交通事故的前提和保障。
2) 事故管理模块:用于实现交通事故勘查数据的管理。可对交通事故勘查结果数据进行分类查询及浏览,实现三维模型的管理;还可进行勘查结果编辑,并验证勘查结果是否准确等。
3) 数据传输模块:主要是数据图像的处理传输、数据库更新,分析出事故原因并进行数据下载,最后实现道路交通事故处理结果的输出。根据已知结果可分析找出车辆的安全性和道路安全建设的最佳方案。事故现场勘查归档系统的功能模块设计,如图8所示。
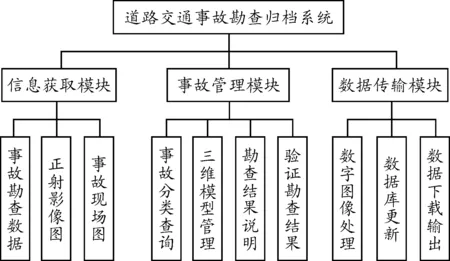
图8 系统的功能模块
总之,根据系统功能需求,设计交通事故现场勘查归档系统能够对交通事故现场记录图、现场比例图、无人机遥感影像数据进行整合管理,通过多种数据类型相结合,使系统具备完整性和多样性。同时,在系统的数据管理模块上,还可审核验证事故勘查结果的准确性等。
3.2.3 结构设计
平台选择:为达到项目需求,系统设计使用Window操作系统、PC设备、ArcGIS Engine Runtime作为当前的计算机硬件以及软件运行的操作平台。
应用环境选择:系统设计使用Microsoft Access数据库作为系统的数据管理中心以及将ArcGIS二次开发工具与Access数据库进行关联使用以达到系统功能的设计需求。
应用模块设计:系统设计分为事故信息模块、数据管理模块、数据传输模块三大模块,通过将功能需求进行合理化的分配,使得系统功能模块化具有完整性。
图形界面设计:在此方面系统设计按照简洁、直观且功能完善的操作界面原则进行设计,在满足工作人员完成基本操作的同时,以简洁直观的方式来减少工作人员的工作量。
系统结构设计通过多方面分析考虑后,选择Microsoft Access数据库、ArcGIS Engine二次开发工具、Visual Studio平台、ArcGIS 10.2运行环境来满足系统结构设计需求。建筑物外立面施工监管GIS平台的功能结构,如图9所示。
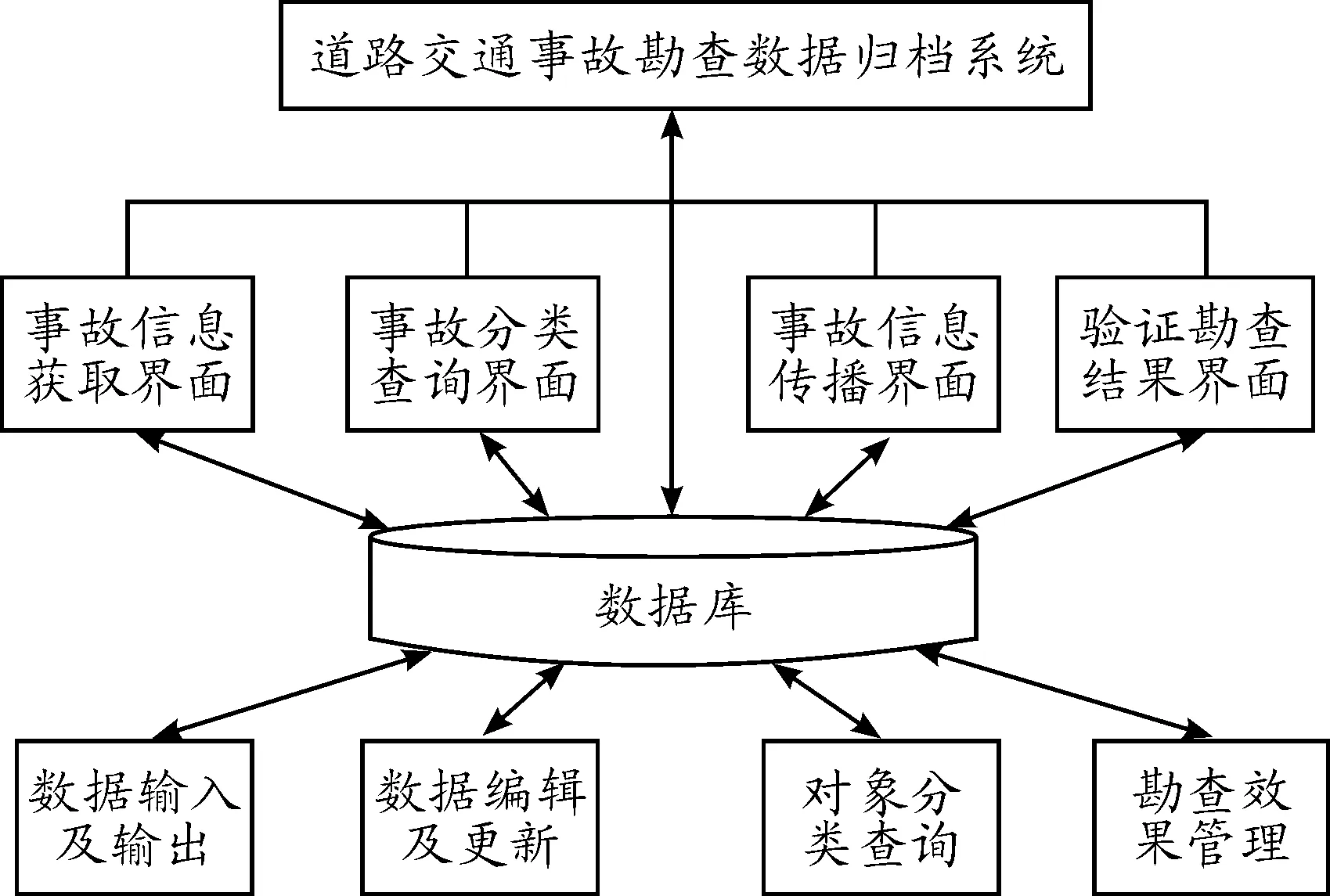
图9 系统的结构设计
3.3 系统分析查询
3.3.1 数据信息获取
事故现场信息基本数据包括矢量数据与栅格数据,其中矢量数据的专题类型分为事故现场记录图、事故现场比例图等,其所对应的专题要素存在道路、车辆、建筑,且还可具体到路灯、井盖等信息;栅格数据主要包括数字遥感影像图、沿线航拍影像等资料。
1) 事故信息获取界面模块:系统主界面显示事故现场区域的遥感影像图,用户可对选定的地图进行浏览、放大、缩小、漫游、图层选择等操作。系统加载影像代码如下所示:
private void LoadMapDocument()
{
string MapPath=Environment.CurrentDirectory+"裁剪影像cjyx.mxd";
axMapControl1.LoadMxFile(MapPath,0,Type.Missing);
axMapControl1.Extent=axMapControl1.FullExtent;
}
在系统的事故信息获取界面模块,用户可以选择查看交通事故现场的区域,点击交通事故现场的点位,系统将显示交通事故现场区域的无人机遥感影像图。图10为系统影像界面模块操作图。在影像界面操作时,通过点击交通事故现场点位坐标时,系统在影像的相关位置生成圆形标记,并跳转至交通事故具体现场的GIS数据库。

图10 系统影像界面模块操作图
2) 数据管理模块:该模块主要负责对数据界面模块中的数据及交通事故现场航拍正射影像图、事故现场图、事故实景记录图等的编辑录入与导出。在数据管理下拉选项有数据导入按钮,在数据导入对话框中填写交通事故现场勘查相关数据信息,主要有交通事故编码、道路名称、事发地点、天气状况、具体时间、道路材质,添加现场航拍图、实景记录图以及事故现场图,点击数据导入弹出对话框,如图11所示。

图11 系统信息获取
3.3.2 数据分析查询
在交通事故勘查数据管理系统中,对于交通事故数据档案可通过分类查询来获取。查询方法有:基于“交通事故编码”查询和基于“道路名称”查询两种方法。在基于“交通事故编码”查询法中,通过输入交通事故编码“2017042501”进行查询,可以快速准确地查询到该次交通事故的完整数据档案,包括该事故的发生地点、事发天气、事发时间、道路材质、事故现场航拍图、事故现场记录图以及事故现场比例图等,如图12(a)所示。
通过输入道路名称“理工路”进行查询,可以查询到在理工路发生的有记录的各类交通事故的完整有数据档案,如图12(b)所示。目前记录的两次发生在理工路的交通事故,可对各事故现场各要素进行浏览查看,非常完整、准确,同时还可对发生在同一位置的不同道路交通事故进行对比,得出事故发生的原因并进行分析总结,提出道路交通安全措施。由以上可以得出:通过数据界面的查询功能,操作方便快捷,同时有助于实现数据的管理与查询,提高数据的高效利用。
3.3.3 验证勘查结果
在交通事故现场档案数据库中进行分类查询数据信息的过程中,交通事故管理人员还可在交通事故信息核查栏中,检查交通事故现场勘查的信息是否完整,勘查统计数据是否准确等,并作出成果确认管理,从而解析找出车辆的安全性和道路安全建设的最佳的方案。此外,在交通事故数据档案系统中进行数据的查询,不仅可进行分类查询,还可查看现场航拍影像图、交通事故记录图、交通事故现场图,以及完整的交通事故现场三维场景图和事故现场视频。交通事故现场三维场景图和事故现场照片及视频等资料具有下载选项,便于事后交通勘查人员进行交通综合分析。详细数据显示如图13所示。
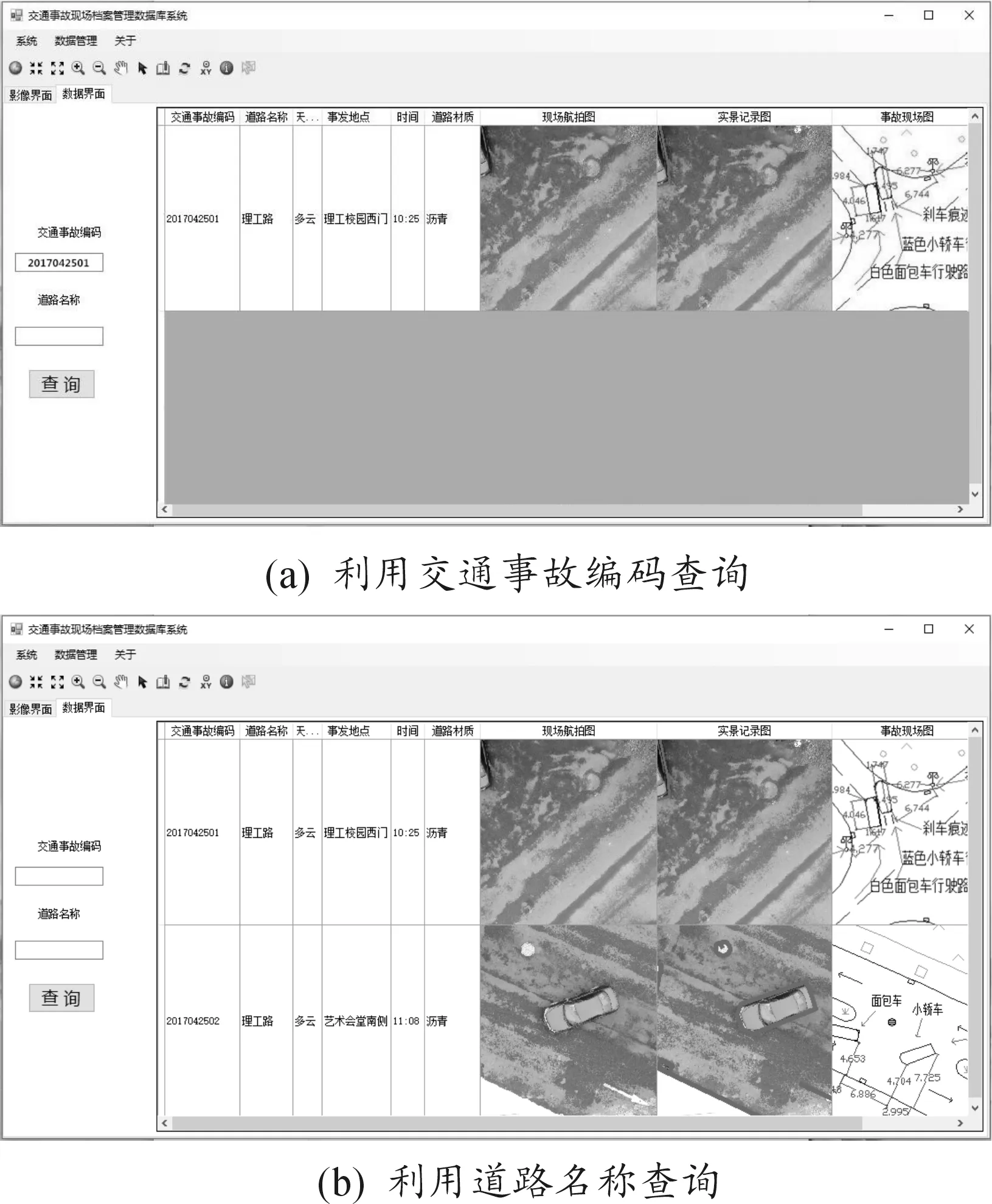
图12 交通事故分析查询
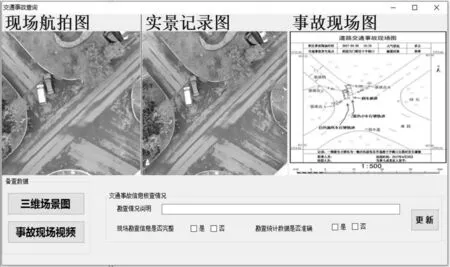
图13 交通事故勘查管理
4 结束语
本文利用无人机航拍获取交通事故现场航拍影像图,大大缩短交通事故的现场勘查时间,避免传统测量方法中存在的测错、少测及无法二次查验的不足。以交通事故现场为研究对象,基于无人机拍摄的高分辨率正射影像,在ArcGIS和CASS软件中处理绘制交通事故现场图,并在勘查时间、精度等方面与传统方式进行对比。在ArcGIS Engine Runtime 等平台基础上,设计交通事故现场勘查数据归档系统,对事故发生的位置、航拍影像图、现场图等大量现场勘查数据进行管理查询,为国内外交通事故现场快速勘查提供应用借鉴。目前存在的问题有:交通事故现场车辆的侧面存在部分数据缺失。今后的发展方向是:结合地面三维激光扫描等技术,构建天地一体化勘查系统以便更加完整地进行交通事故现场的勘查信息获取。
[1] 王丽波,刘志龙.基于三维激光扫描技术在交通事故现场勘查中的应用研究[J].科技创新与应用,2015(36):78-78.
[2] 杨博,金先龙,张晓云,等.基于数字化摄影测量的交通事故信息采集和过程再现[J].汽车工程,2010,32(6):530-534.
[3] 田建,李江,李亚桥.道路交通事故摄影测量的标定技术[J].吉林大学学报(工学版),2006,36(B3):136-139.
[4] 洪亮,陈昆山.交通事故现场三维数字化信息的获取及实现[J].拖拉机与农用运输车,2010,37(6):60-63.
[5] 刘文超.交通事故现场摄影测量立体视觉系统构建及标定[D].北京:清华大学,2011.
[6] DOHERTY P,GRANLUND G,KUCHCINSKI K,et al.The WITAS unmanned aerial vehicle project[C]//Proceedings of the 14th European conference on artificial intelligence.[s.l.],IOS Press,2000:747-755.
[7] PURI A,VALAVANIS K P,KONTITSIS M.Statistical profile generation for traffic monitoring using real-time UAV based video data[C]//Mediterranean:Conference on Control & Automation.[s.l.],IEEE,2007:1-6.
[8] LEE J,ZHONG Z,KIM K,et al.Examining the applicability of small quadcopter drone for traffic surveillance and roadway incident monitoring[C]// Transportation Research Board Meeting.Washington,[s.n.],2015:34-35.
[9] 陈强,许洪国,谭立东.基于小型无人机摄影测量的交通事故现场勘查[J].吉林大学学报(工学版),2016,46(5):1440-1446.
[10] 彭博,张有节,蔡晓禹,等.基于无人机的交通监控研究现状与展望[C]//中国智能交通年会论文集.重庆: [出版者不详],2016:104-113.
[11] 赵国朋.利用无人机开展事故现场勘查的探索[J].道路交通管理,2016(2):32-33.
[12] 何原荣,郑渊茂.无人机航拍技术配合遥感的海岸带规划应用[J].现代电子技术,2015(23):24-27.
[13] 陈风.基于无人机影像空中三角测量的研究[D].南昌:东华理工大学,2012.
[14] 王聪华.无人飞行器低空遥感影像数据处理方法[D].青岛:山东科技大学,2006.
[15] 吕庆海.谈低空无人机航摄遥感在测绘领域的应用[J].黑龙江科技信息,2014(27):141-142.
(责任编辑陈 艳)
RapidMappingofTrafficAccidentSceneandArchiveSystemConstructionBasedonUAVAerialTechnology
ZHENG Yuanmao1, HE Yuanrong1, LENG Peng2a,2b, YAO Chengxin1
(1.Xiamen University of Technology, Xiamen 361024, China; 2.a.Provincial Spatial Information Engineering Research Center; b.Key Laboratory of Spatial Data Mining and Information Sharing of Ministry of Education, Fuzhou University, Fuzhou 350002, China)
This paper studies traffic accident scene exploration as the research object, based on a low UAV photograph of a high resolution orthogonal projection like in ArcGIS and CASS software processing map simulation of traffic accident scene, and the measuring time and precision are compared with traditional methods such as analysis, to explore a huge advantage of UAV at the scene of the accident. In addition, in ArcGIS Engine Runtime platforms such as basis, the design of traffic accident scene data management system, the accident location, aerial image, the scene graph, we classify a large number of field exploration data management and analyze the query. The results show that the UAV is applied in traffic accident field method and the formation of the system not only is improved in the traffic accident scene fast mapping, shortening the time of accident investigation, but also facilitates the management of the exploration data query, which provides experience for reference for traffic accident scene fast exploration at home and abroad.
UAV; traffic accident scene; rapid cartography; visual studio platforn; filing system
2016-07-12
国家自然基金面上项目(41574011);福建省自然基金面上项目(2016J01199);厦门理工学院研究生科技创新计划项目(YKJCX2016015)
郑渊茂(1991—),男,福建漳州人,硕士研究生,主要从事无人机、三维激光扫描技术及应用研究,E-mail:zhengyuanmao@yeah.net;通讯作者 何原荣(1977—),男,福建漳州人,教授,主要从事地图制图学与地理信息工程研究,E-mail:heyuanrong@126.com。
郑渊茂,何原荣,冷鹏,等.基于无人机的交通事故现场快速制图及归档系统构建[J].重庆理工大学学报(自然科学),2017(11):146-155.
formatZHENG Yuanmao, HE Yuanrong, LENG Peng, et al.Rapid Mapping of Traffic Accident Scene and Archive System Construction Based on UAV Aerial Technology[J].Journal of Chongqing University of Technology(Natural Science),2017(11):146-155.
10.3969/j.issn.1674-8425(z).2017.11.022
TP391
A
1674-8425(2017)11-0146-10
