掘进巷道快速通过采空区围岩的控制技术
2017-12-06毕业武张春峰范秀利
毕业武, 张春峰, 范秀利
(1.黑龙江科技大学 安全工程学院, 哈尔滨 150022; 2.黑龙江省龙煤矿业集团股份有限责任公司 七台河分公司, 黑龙江 七台河 154600)
掘进巷道快速通过采空区围岩的控制技术
毕业武1, 张春峰2, 范秀利1
(1.黑龙江科技大学 安全工程学院, 哈尔滨 150022; 2.黑龙江省龙煤矿业集团股份有限责任公司 七台河分公司, 黑龙江 七台河 154600)
为解决掘进巷道快速通过采空区时围岩控制难题,以新建煤矿掘进巷道过采空区为工程背景,采用理论分析、数值模拟和工业试验相结合的方法,研究了采空区掘进巷道围岩应力分布规律,提出了“三段式”巷道围岩控制技术,即揭露采空区前50 m范围采用“锚网索带喷+U型支架+注浆”支护、揭露采空区期间40 m范围采用“注浆+索网带+U型支架+喷浆”支护、揭露采空区后20 m范围采用“U型支架+喷浆+注浆+锚网索带”支护。现场工业试验表明,该技术有效控制了巷道围岩变形,巷道顶底板最大移近量285 mm,两帮最大移近量223 mm。该技术在同等条件下具有推广应用价值。
围岩控制; 围岩应力; 采空区; FLAC3D
随着煤炭的大量开采,煤矿地下空间形成了形态各异的采空区。对于深部开采及重组整合的矿井,巷道掘进过程中容易揭露采空区,由于采空区上方岩体已垮落,巷道掘进过采空区期间顶板随掘随垮,顶板冒落形成高冒区,巷道掘进后围岩很难控制,巷道围岩收敛变形大,生产安全受到很大威胁,因此,采空区内掘进巷道围岩控制问题成为该类矿井面临的普遍难题。目前,一些学者开展了采空区内掘进巷道围岩控制相关研究[1-11],如袁自仲[1]研究淮南矿业集团矿业分公司施工的-660 mV—VI线轨道石门期间,通过采用超前钻探、对采空区预注浆及有效的安全防护措施、更改支护形式等方法,安全快速的穿过了采空区;梁文学[7]提出了浅埋煤层管棚和锚喷临时支护以及钢混永久支护相结合的过采空区支护设计方法等。基于上述研究,笔者以新建煤矿掘进巷道过采空区为工程背景,开展掘进巷道通过采空区围岩应力分布规律及控制技术研究工作,以期为采空区内安全、快速掘进巷道和同类条件下巷道围岩控制提供参考。
1 过采空区巷道围岩应力分布规律
1.1采空区概况
新建煤矿为龙煤集团七台河分公司主力煤矿,随着矿井的深部开采,为保证矿井采掘平衡,同时减少巷道的施工长度、工期以及经济成本,需要-15°定坡施工三水平运输下山,巷道掘进必须经过98#煤层采空区,全程约40 m,如图1所示。

a 平面

b 剖面
98#煤层采空区已形成8 a左右,采空区围岩相对处于稳定状态,估算98#煤层采空区冒落带高度为2~4 m。巷道掘进通过采空区受矿压影响,为保证掘进巷道安全、快速通过采空区,务必对采空区围岩采取加固措施。
1.2分布规律
首先,由文献[12]的数值模拟分析结果可知,三水平运输下山掘进巷道通过采空区前后历经揭露采空区前、揭露采空区期间和揭露采空区后三个应力区。揭露采空区前,先进入应力增高区,其影响范围距离采空区边缘达45 m,然后进入原岩应力等值区,影响范围达12 m,最后进入应力降低区,影响范围达15 m;揭露采空区期间,进入应力降低区,影响范围达40 m;揭露采空区后,首先进入应力降低区,影响范围达10 m,然后进入原岩应力等值区,影响范围达5 m,最后进入应力增高区,影响范围达10~20 m。
其次,由图1分析可知,三水平运输下山掘进巷道揭露采空区前,首先经过煤体应力影响区,该区域为应力增高区,掘进巷道围岩应力较大,经过煤体应力影响区后进入采空区,采空区内煤岩体比较松软破碎,该区域为应力降低区,掘进巷道围岩应力较小,通过采空区后掘进巷道经过煤柱应力影响区,该区域为应力增高区,掘进巷道围岩应力较大,通过煤柱应力影响区后,掘进巷道围岩应力基本恢复到原岩应力,因此,掘进巷道通过采空区前后依次历经应力增高区、应力降低区、应力增高区,最后进入原岩应力区。
2 过采空区巷道围岩控制技术
2.1巷道围岩控制技术途径
依据过采空区巷道围岩应力分布规律,结合新建煤矿98#煤层采空区周围地质条件,笔者提出 “三段式”围岩控制技术,即第一阶段揭露采空区前、第二阶段揭露采空区期间和第三阶段揭露采空区后围岩控制技术。
2.1.1 揭露采空区前围岩控制技术
当三水平运输下山巷道掘进工作面距98#煤层采空区揭露点50 m左右时,进入应力集中区,该区域可采用锚杆锚索金属网钢带联合支护技术,在允许巷道围岩发生一定变形的基础上,充分发挥锚索的悬吊作用,将锚索锚固到深部稳定岩层中;对于围岩破碎区域,可通过U型钢金属支架加强支护,从而保证巷道整体稳定性;当巷道进入原岩应力等值区和应力降低区,该区域巷道围岩整体结构遭到破坏,裂隙发育,该区域除采用上述围岩控制技术外,还需要采用超前注浆加固技术,注浆起点选择距离采空区揭露点20 m的位置。
2.1.2 揭露采空区期间围岩控制技术
巷道揭露采空区整个过程40 m左右,巷道围岩比较破碎,除采用超前注浆加固技术外,还应采用锚索金属网钢带和架设金属支架加强支护,架设金属支架壁后和顶板一定要充填密实,充分发挥金属支架支撑作用,同时增加喷浆支护,防止围岩风化变形和巷道漏风,从而保证巷道围岩整体稳定性。该期间关键是合理利用超前注浆和架设金属支架壁后、顶板充填技术,以保证巷道掘进安全、可靠。
2.1.3 通过采空区后围岩控制技术
根据巷道历经应力分区及围岩状况,在应力降低区和原岩应力等值区10 m左右范围可采用架设金属支架支护和喷浆支护,在应力增高区10 m左右范围可采用锚杆锚索金属网钢带喷浆联合支护,在原岩应力区采用正常锚杆支护。
2.2巷道围岩控制效果数值模拟
依据现场地质及开采条件,建立FALC3D数值模型[13],煤岩力学参数见表1。模型尺寸为220 m×350 m×90 m,开采厚度为0.8 m,模型上方为自由边界,垂直应力为15 MPa,下方和侧面为固定边界,水平应力为18 MPa,数值计算模型见图2。

表1 煤岩力学参数
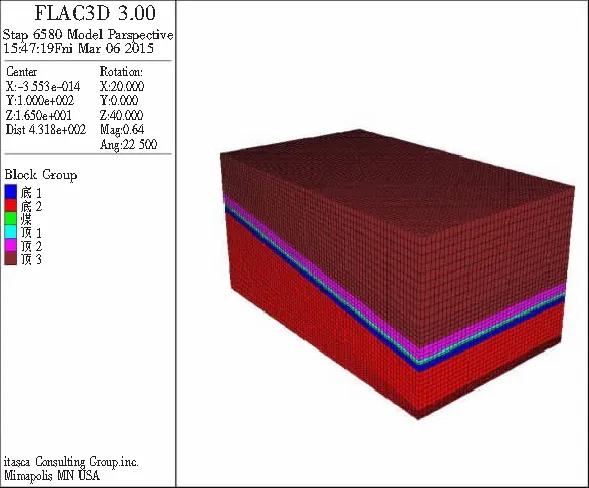
图2 数值计算模型
巷道围岩控制分为原岩应力区(15 MPa)锚网联合和高应力区(18 MPa)锚网索联合支护两种工况模拟,巷道围岩应力和位移等值线见图3和图4。
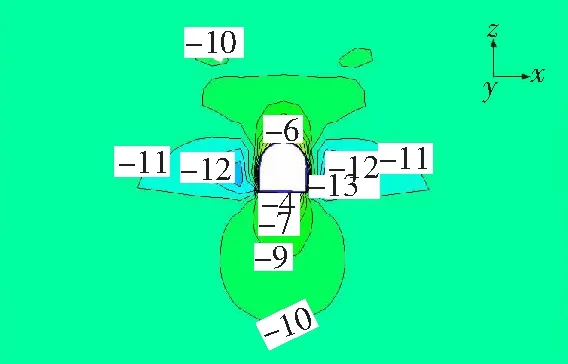
a 应力分布

b 位移分布
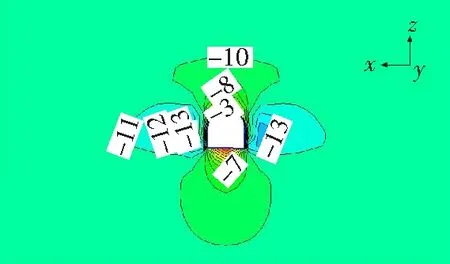
a 应力分布,无锚索
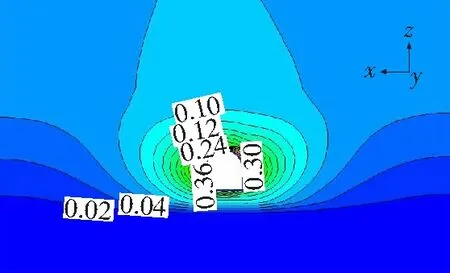
b 位移分布,无锚索

c 应力分布,有锚索
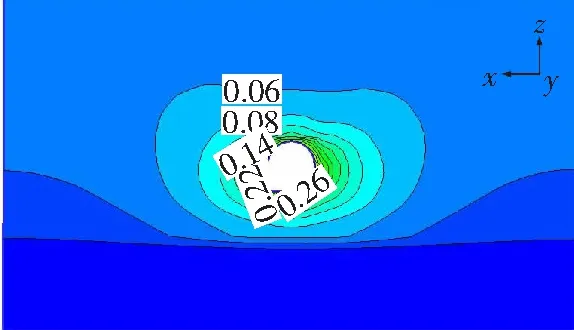
d 位移分布,有锚索
由图3和4可知,巷道围岩应力基本呈左右对称分布,底板应力分布呈类似卵形“应力泡”,顶板应力分布较不均匀,顶底板形成应力降低区。观察图3可见,在原岩应力区,采用锚网支护方式巷道两帮受力大于顶底板受力,巷道围岩最大位移量为120 mm,该支护方式能够实现对巷道围岩的有效控制。由图4可知,在高应力区,如果只采用锚网(无锚索)支护条件下,巷道两帮受力明显大于顶底板受力,与原岩应力区巷道围岩受力相比差别不大,但巷道围岩最大位移量为360 mm变化显著,与原岩应力区相比,最大位移量增加2倍,当采用锚网索支护后巷道围岩最大位移量为260 mm,巷道围岩最大位移量减少100 mm,可见,采用锚网索支护巷道围岩控制效果较好。
3 现场工业试验
3.1工程概况
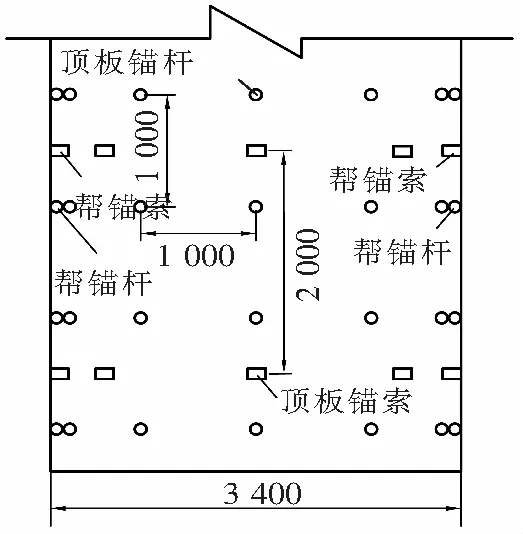
三水平运输下山巷道宽×高为3 400 mm×3 600 mm,半圆拱形,支护形式:顶板布置φ20 mm×1 600 mm预应力锚杆3根,间排距1 000 mm×1 000 mm,同一断面布置3根顶板锚杆;巷道一帮布置φ20 mm×1 600 mm预应力锚杆2根,间排距1 000 mm×1 000 mm,同一断面布置4根帮锚杆,巷道锚杆布置及参数如图5所示。

a 正视
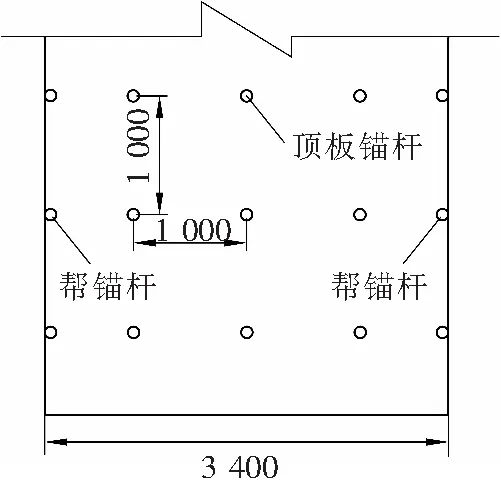
b 俯视
98#煤层为单一结构,赋存不稳定,局部可采,最大厚度0.90 m,平均厚度0.80 m,直接顶主要由1.60 m厚的粉砂岩和1.75 m厚的细砂岩组成,基本顶为平均9.50 m厚的粉砂岩,直接底为3.50 m的粉砂岩,煤岩综合柱状图如图6所示。
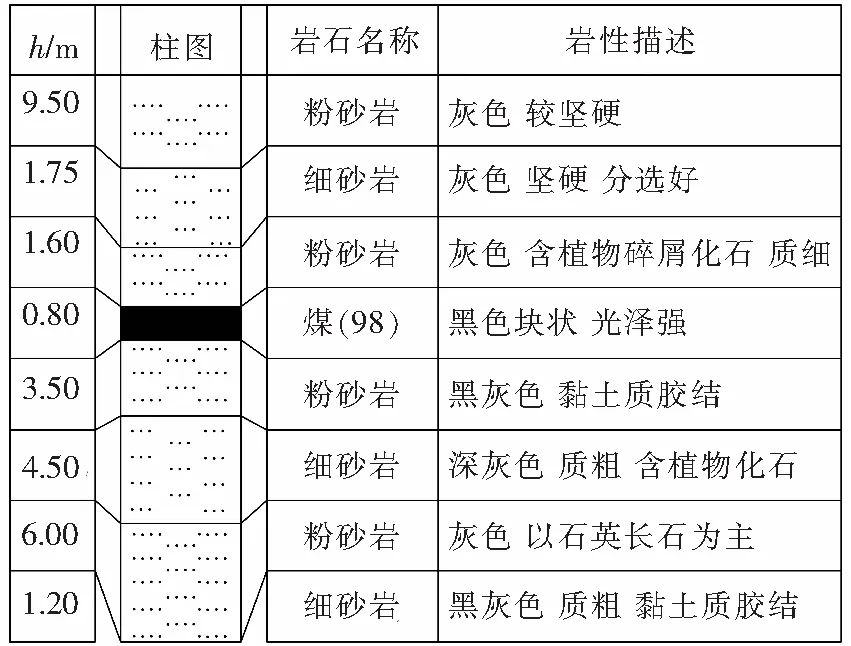
图6 煤岩综合柱状图
Fig.6Coalrocksynthesiscolumnarsectionofsecondminingarea
3.2分阶段巷道围岩控制技术
3.2.1 揭露采空区前
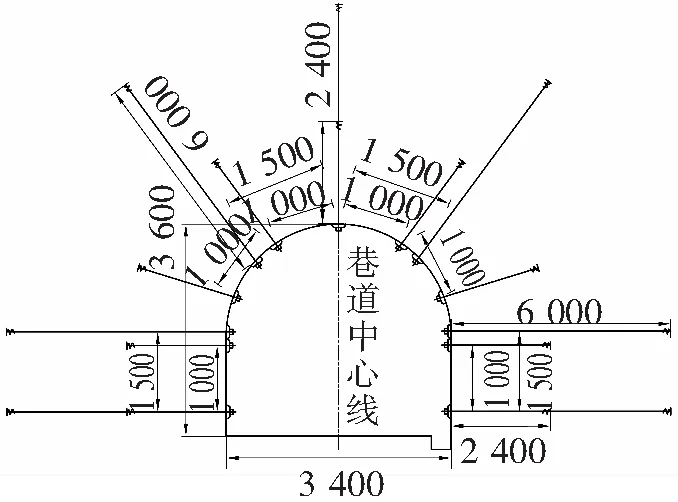
(1)锚网索带+U型支架支护技术。在该阶段,巷道支护形式及参数如图7所示。
巷道顶板采用锚杆和锚索联合支护[14-15],锚杆采用φ22 mm×2 400 mm高强度让压锚杆,所有锚杆都带有钢带,每根锚杆使用2卷树脂锚固剂,锚固力大于100 kN,配有让压环及拱形托板,可转向垫圈螺母,同一断面从巷道肩部到顶板共布置5根锚杆,间排距1 000 mm×1 000 mm;锚索采用φ17.8 mm×6 000 mm的高强度高延伸率预应力钢绞线,锚固力不小于200 kN,间排距1 500 mm×2 000 mm,所有的锚索都带有钢带,每根锚索使用树脂药卷不少于2个,一个断面布置3根锚索。巷道两帮采用锚杆和锚索联合支护,锚杆和锚索性能、参数与顶板锚杆和锚索相同,同一断面巷道两帮各布置2根锚杆和2根锚索,巷道两帮最下位锚杆和锚索距底板500 mm左右。在异常破碎围岩区域采用U型钢金属支架进行加强支护,如图8所示。
(2)喷浆支护技术。为防止巷道围岩风化,采用喷浆支护技术,考虑煤矿井下生产实际,喷浆工作在一个圆班工作时间内完成,围岩暴露时间不超过1 d,巷道喷浆厚度不小于20 mm。
(3)超前注浆加固技术。距离采空区揭露点大约20 m时,由于巷道围岩出现裂隙、破碎,除采用上述围岩控制技术,还增加了超前注浆加固技术[14-15]。注浆设备采用气动注浆泵和气动浆液搅拌筒,采用水玻璃和水泥浆两种浆液进行注浆,水泥选用牡丹江425号普通硅酸盐水泥。注浆锚杆长2.5 m,1寸钢管压制而成,管体周围留设注浆孔,顶板锚杆间距1.5 m,布置3根锚杆,前倾30°;巷道两帮距底板1 m左右各布置一根锚杆,锚杆与巷帮法线呈75°,下倾15°;巷道底板布置2根锚杆,锚杆下倾35°,整个断面共布置7根注浆锚杆,锚杆布置形式及参数如图9所示。
a 正视
b 俯视

图8 U型钢金属支架
3.2.2 揭露采空区期间
揭露采空区期间,采空区破碎范围40 m左右,冒落带高度超过2 m,加上巷道原有高度3.6 m,巷道高度超过6 m。在该阶段,巷道除采用与揭露采空区前相同的超前注浆技术外,还采用如下巷道围岩控制技术[16-17]:
(1)巷道两帮采用锚索钢带金属网支护,锚索长6 000 mm,钢带长2 400 mm,间排距1 000 mm×1 000 mm;巷道顶板采用锚索U型钢金属网支护,锚索长8 000 mm,U型钢长500 mm,间排距1 000 mm×1 000 mm,巷道两帮最下位锚索距底板600 mm左右,与巷帮法线方向夹角为30°,锚索布置形式及参数如图10所示。
(2)巷道采用架设U型钢金属支架和喷浆加强巷道支护,金属支架间距为1 000 mm,架设金属支架后及时喷浆,喷浆厚度50 mm。
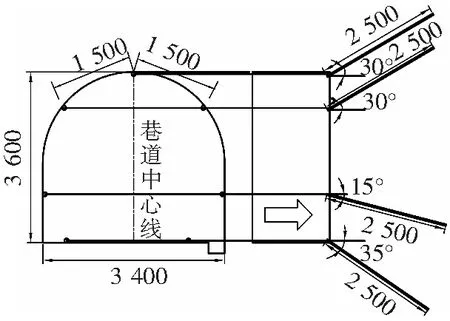
图9 超前注浆锚杆布置及参数

图10 锚索布置及参数
3.2.3 通过采空区后
通过98#煤层采空区后大约10 m范围,采用架设U型金属支架和喷浆支护,金属支架间距为1 000 mm,喷浆厚度50 mm,同时采用超前注浆技术,注浆锚杆布置和参数与前述注浆锚杆布置与参数相同,再之后10 m左右范围,采用锚杆锚索金属网钢带喷浆联合支护,锚杆锚索性能及参数如图7所示,通过该区域后恢复正常锚杆支护。
3.3矿压监测及围岩控制效果分析
为检验掘进巷道过采空区围岩控制方案合理性,采用“十”型布点法测量巷道顶底板及两帮的相对位移,评价围岩控制效果。在距离揭露采空区前30 m范围内布置1个测点、揭露采空区40 m范围内布置2个测点,揭露采空区后20 m范围内布置1个测点,监测结果如图11所示,围岩控制效果见图12。
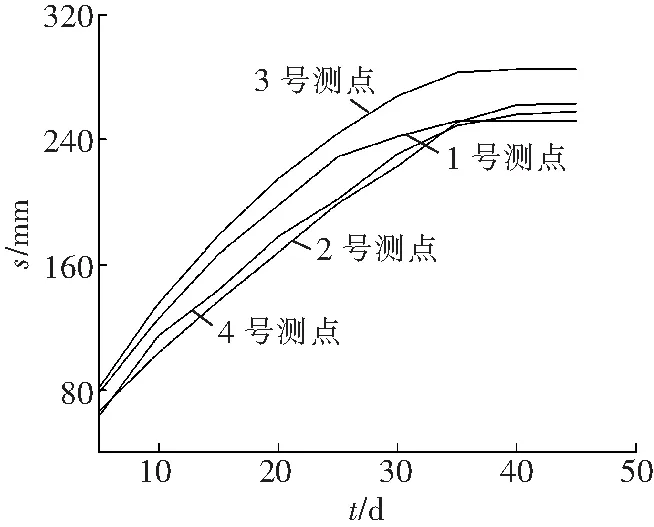
a 顶底板
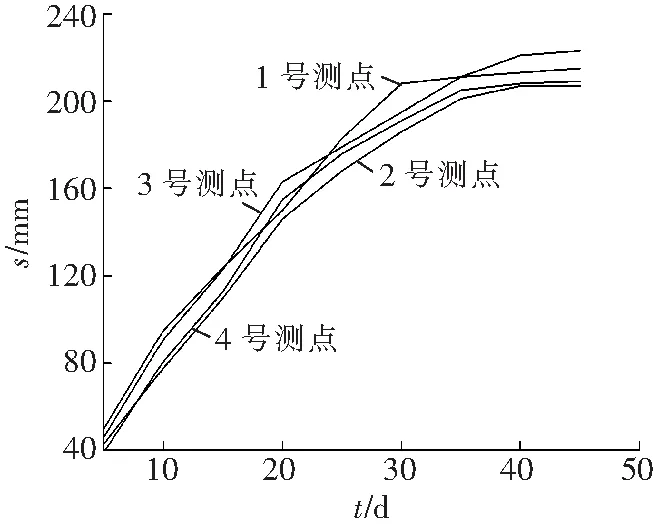
b 两帮
Fig.11Relativedisplacementcurvesofroofandfloorandbothsidesofexcavationroadwaythroughgoaf

图12 过采空区巷道围岩控制效果
Fig.12Controleffectofsurroundingrockofexcavationroadwaythroughgoaf
由图11巷道表面位移监测数据可知,通过采用“三段式”巷道围岩控制方案,巷道顶底板最大移近量为285 mm,两帮最大移近量为223 mm,监测40 d后巷道达到稳定状态,巷道围岩变形得到有效控制,围岩控制效果较好(图12)。
4 结 论
(1)基于过采空区巷道围岩应力分布规律研究,笔者提出了“三段式”巷道围岩控制技术,即揭露采空区前50 m范围采用“锚网索带喷+U型支架+注浆”支护、揭露采空区期间40 m范围采用“注浆+索网带+U型支架+喷浆”支护、揭露采空区后20 m范围采用“U型支架+喷浆+注浆+锚网索带”支护。
(2)现场工业试验表明,“三段式”巷道围岩控制技术有效控制了过采空区巷道的围岩变形,巷道顶底板最大移近量285 mm,两帮最大移近量223 mm,巷道围岩控制效果较好。
(3)该研究构建形成了适合于七台河矿区地质条件下掘进巷道过采空区的围岩控制技术,为掘进巷道过采空区提供了新思路,对同类条件下巷道围岩控制具有重要借鉴意义。
[1] 袁自仲. 掘进巷道贯穿采空区的工程实践[J]. 安徽理工大学学报(自然科学版), 2012(32): 305-307.
[2] 李苏龙, 侯 玮, 李新明, 等. 整合矿井采空区内掘进巷道围岩加固支护技术[J]. 煤炭科学技术, 2012, 40(11): 38-44.
[3] 王瑞光, 赵志刚, 刘镇京, 等. 岩巷掘进过采空区注马丽散超前加固技术[J]. 中州煤炭, 2012(3): 59-60.
[4] 孙相斌. 运输大巷过采空区巷道支护与施工[J]. 陕西煤炭,2012(4): 115-116.
[5] 侯 玮, 霍海鹰, 田端信, 等. 整合矿采空区掘进巷道围岩综合控制技术研究[J]. 煤炭工程, 2013(1): 86-92.
[6] 苏清政, 杨榆生, 潘 越, 等. 整合煤矿采空区内掘进巷道注浆加固技术[J]. 煤炭科学技术, 2013, 41(7): 51-53.
[7] 梁文学. 浅埋深煤层过采空区巷道锚固支护方法[J]. 职业技术学院学报, 2013, 12(1): 15-19.
[8] 高胜利. 煤矿巷道掘进特殊情况对策分析[J]. 煤炭技术, 2014, 33(9): 199-201.
[9] 李锁柱, 杨献兵. 探注联合技术在立井过采空区中的应用[J]. 煤矿安全, 2015, 46(1): 112-115.
[10] 常春峰. 五阳矿集中胶带大巷穿越采空区围岩控制技术研究[J]. 煤炭与化工, 2016, 39(7): 13-16.
[11] 李旭峰. 立井通过采空区施工技术[J]. 建井技术, 2016, 37(6): 9-12.
[12] 张国华, 范秀利. 掘进巷道过采空区围岩应力演化规律数值模拟[J]. 黑龙江科技大学学报, 2015, 25(5): 463-468.
[13] 陈育民, 徐鼎平. FLAC/FLAC3D基础与工程实例[M]. 北京: 中国水利水电出版社, 2013: 1-93, 147-174.
[14] 毕业武, 范秀利, 蒲文龙, 等. 深井近距离煤层群回采巷道失稳致因与控制技术[J]. 煤炭科学技术, 2015, 43(10): 51-55.
[15] 凌 涛, 王卫军, 彭文庆. 破碎围岩巷道支护技术研究及工程应用[J]. 河北工程大学学报(自然科学版), 2014, 31(3): 71-74.
[16] 高振勇, 樊正兴. 深井软岩巷道二次锚网索支护技术[J]. 煤炭科学技术, 2014, 42(2): 12-15.
[17] 熊礼军, 程学华, 查文华. 地质条件下回采巷道分区动态加固支护技术研究[J]. 煤炭工程, 2015, 47(1): 40-43.
(编校王 冬)
Controltechnologyofsurroundingrockofexcavationroadwaythroughgoafquickly
BiYewu1,ZhangChunfeng2,FanXiuli1
(1.School of Safety Engineering, Heilongjiang University of Science & Technology, Harbin 150022, China; 2.Qitaihe Branch, Heilongjiang Longmay Mining Holding Group Co. Ltd., Qitaihe 154600, China)
This paper presents a solution to the control problem of surrounding rock due to the necessity of quickly driving excavation roadway through goaf. The study building on the data from Xinjian coal mine with an excavation roadway driven through goaf involves investigating the underlying law behind the stress distribution of surrounding rocks in excavation roadway through goaf, combined with the theory analysis, the computer numerical simulation, and the field test; and developing a three-stage “controlling technology of surrounding rocks of excavation roadway”: “bolting net cable belt spray+U-steel metal shelf+grouting” within 50 m range before goaf exposure, “grouting+cable net belt+U-steel metal shelf+spraying” within 40 m range during the goaf exposure, “U-steel metal shelf+spraying+grouting+bolting net cable belt” within 20 m range after goaf exposure. The field test result demonstrates that the proposed technology promises a wider application in the same condition, thanks to its demonstrated ability to effectively control the deformation of surrounding rocks of roadway and enabl the maximum roof and floor displacement of 285 mm and the maximum roadway sides displacement of 223 mm.
surrounding rock control; surrounding rock stress; goaf; FLAC3D
10.3969/j.issn.2095-7262.2017.06.002
TD353; TD322
2095-7262(2017)06-0581-06
A
2017-07-27
毕业武(1978-),男,黑龙江省安达人,讲师,硕士,研究方向:矿井围岩控制与灾害防治、矿山应急救援、爆破安全,E-mail:biyewu@163.com。
