基于三维激光点云的靶标叶面积密度计算方法
2017-12-04张美娜吕晓兰雷哓晖杨青松张东新
张美娜 吕晓兰 邱 威 雷哓晖 杨青松 张东新
(1.江苏省农业科学院农业设施与装备研究所, 南京 210014; 2.南京农业大学工学院, 南京 210031;3.江苏省农业科学院园艺所, 南京 210014)
基于三维激光点云的靶标叶面积密度计算方法
张美娜1吕晓兰1邱 威2雷哓晖1杨青松3张东新1
(1.江苏省农业科学院农业设施与装备研究所, 南京 210014; 2.南京农业大学工学院, 南京 210031;3.江苏省农业科学院园艺所, 南京 210014)
为向变量喷雾系统施药量的计算提供数据基础,提出了靶标喷施区域叶面积密度参数的计算方法。靶标三维点云数据由二维激光雷达传感器沿果树行直线运动间接获取。在假设各喷施子区域内叶片面积变化相对较小的条件下,基于Matlab曲线拟合工具箱cftool分析并验证了点云数与叶片数之间存在函数关系。曲线拟合结果表明,利用高斯函数、多项式函数与指数函数拟合点云数与叶片数,决定系数分别为0.925 7、0.931 0与0.936 4,指数函数拟合效果最好。相对误差分析结果表明,基于3种拟合函数,枝叶茂密区域相对误差最小为11.46%,枝叶中等茂密区域相对误差最小为11.05%,枝叶稀疏区域相对误差最小为35.50%。基于确定的点云数与叶片数间的函数方程,经系数变换后可计算出叶面积密度参数。
变量喷雾; 激光雷达扫描; 三维点云; 点云密度; 叶面积密度
引言
采用化学农药喷雾仍是中国防治果树病虫害的主要手段,但农药有效利用率(20%~30%)普遍偏低,大水量、粗雾喷洒的施药方式严重影响环境安全、生态安全、农产品质量安全和国民身体健康[1]。变量喷雾技术[2]根据靶标信息的不同,自动控制植保喷雾机械作业,实现对喷雾对象的按需施药,是减少农药危害的必要手段之一,其首先要解决的问题是如何精确获取指导农药喷施的靶标信息参数。
近年来,为替代人工测量,出现了采用光传感器、超声波传感器[3-7]、立体视觉[8-10]以及激光雷达扫描传感器[11-19]等各类检测装置进行靶标探测的研究。ROSELL等[11]指出,激光雷达扫描传感器精度高、响应快,能够获得靶标的三维模型,是最具发展潜力的应用技术。由于激光雷达扫描传感器返回的是目标点的距离值,不包含果树枝叶颜色、病虫害等生物信息,为此,相关研究主要集中在计算靶标的几何特征参数上,其中计算最多的参数为靶标区域生物量的体积。
熊妮娜等[12]通过扫描获取单株树木的三维空间点阵数据,将树冠近似为多个圆台体,通过累加计算树冠体积。GIL等[13]将树冠近似为3个矩形块的叠加,计算树冠体积。CHEN等[14]将树冠进行网格划分,利用矩形块累加计算指定区域生物量的体积。上述研究计算体积的方法概括为几何体累加法。俞龙等[15]基于树冠三维点云数据,采用切片技术提取冠层点云的面、线信息,以累加方式计算果树冠体积。徐伟恒等[16-17]以三维激光扫描获取的树木点云数据为数据源,运用不规则体切片分割累加算法实现树冠体积的自动提取,切片间隔为1 mm。上述研究计算体积的方法概括为切片累加法。韦雪花等[18]针对树冠形状不规则,基于三维激光扫描点云,提出基于体元模拟法的树冠生物量体积计算方法,指出体元边长等于冠径的1/10时树冠生物量体积值达到稳定。MARTIN等[19]基于三维激光扫描点云,采用边长为15 mm的立方体元重构树冠,计算树冠体积。上述研究计算体积的方法概括为立方体元累加法。
上述研究中,几何体累加法简单易操作,但用一个或多个实心的规则几何体来描述树冠,忽略了树冠外轮廓的不规则和孔隙部分,尤其对于枝叶稀疏期,计算误差较大。切片累加法有效解决了树冠外轮廓不规则的问题,但因为求取的是切面外包络内的面积,势必包含了许多孔隙部分,计算误差仍然较大。立方体元累加法对树冠外轮廓的描述更加细化,枝叶间较大孔隙可以去除;但是,该方法在保证计算精度的同时,较小的体元尺寸会导致较长的计算时间,实时性差,难以适用于果树靶标实时的施药作业。
针对计算体积参数的诸多问题,为满足果树精准、实时施药的作业需求,本文提出基于靶标三维激光点云数据提取计算叶面积密度参数,为植保机械喷雾系统施药量的计算提供参考。
1 材料和方法
1.1 精准喷雾系统结构
精准喷雾系统结构示意图如图1所示。

图1 精准喷雾系统结构示意图Fig.1 Structure sketch of precise spraying system1.试验移动平台 2.喷雾系统 3.靶标探测系统 4.传感器
靶标探测传感器位于前端进行探测,喷雾系统置于后端进行变量喷雾,两者距离为L(m)。假设喷雾系统采用垂直喷雾的方式,单侧喷雾时雾滴能够穿透靶标,将靶标平面进行网格划分,每个喷施区域是一个l×w×d的矩形空间,l、w、d分别为喷施区域网格的高度、宽度和深度(m),对应区域的施药量记为参数Pj(i)(i、j∈N)),精准喷雾系统依据Pj(i)值的不同控制喷雾系统执行机构动作实现变量喷雾作业。
施药量Pj(i)的计算包含多种参考因素,如靶标的几何特征信息Gj(i)、病虫害信息Dj(i)与农药信息Cj(i)等,这些相关参数通过模型辨识能够获取计算施药量的数学模型,即Pj(i)=f(Gj(i),Dj(i),Cj(i))。
本文以激光雷达扫描传感器作为靶标探测装置,主要计算靶标几何特征参数Gj(i)。
1.2 靶标探测系统试验平台
靶标探测系统试验平台如图2所示。

图2 靶标探测系统试验平台Fig.2 Test platform of target detection1.便携式计算机 2.二维激光雷达扫描传感器 3.云台支架 4.增量式光电编码器 5.电控滑轨
该平台由便携式计算机、二维激光雷达扫描传感器(Light detection and ranging,LIDAR)、云台支架、增量式光电编码器以及电控滑轨组成。靶标探测系统通过二维激光雷达扫描传感器垂直于扫描平面运动,间接获取靶标的三维点云数据。
系统选用西克公司的LMS111二维激光雷达扫描传感器探测靶标,获取各扫描面内靶标的距离与角度。传感器扫描范围最大20 m,扫描角度最大270°,角度分辨率为0.25°或0.5°可调,响应时间为40 ms或20 ms。系统选用西克公司的DBS36E增量式编码器,安装编码器与滑轨电动机同轴,输出脉冲用于计算各二维激光扫描面在水平方向的坐标值。编码器的分辨率为一圈输出2 048个脉冲,输出信号类型为高阈值逻辑(High threshold logic,HTL)推/挽式信号输出。便携式计算机为数据采集与处理终端。
1.3 叶面积密度计算方法
传统农药喷施的目标是将药剂均匀地喷洒到每一片叶片上,即施药量q是关于叶片面积s的函数,即q=f(s),但由于叶片数量繁多且存在部分遮挡,通过无损测量方法难以快速计算叶片面积。叶面积s可通过叶面积密度ρ乘以区域体积V进行间接计算,即s=ρV。其中,叶面积密度ρ用以描述树冠的枝叶稀疏情况,它指单位体积内的叶面积(m2/m3),即

(1)
假设区域体积V内叶片数为nl,每片树叶的面积为si(i=1,2,…,nl),将树叶编号排序,每片叶子与第一片叶子的叶面积之差记为Δsi(i=1,2,…,nl-1),则区域体积V内叶面积可表示为
(2)


(3)
即,当s1与V值确定的情况下,叶面积密度ρ随nl的变化而变化。
基于区域体积V内叶片数越多,叶面积越大,传感器输出的点云数越多,本文提出利用点云密度ρp表征叶面积密度ρ,计算方法为

(4)
式中np为指定区域体积内探测返回的靶标的点云数据个数,nmax为布满该区域体积内点云数据个数理论最大值。即当nmax值确定的情况下,点云密度ρp随np的变化而变化。
式(3)与式(4)中区域体积V内叶片数nl与点云数np都是能够简单获取计算的数值,为此,通过数据分析确定nl与np间的函数关系,再通过系数计算就能够确定参数ρ与ρp间的函数关系。
2 试验
2.1 激光雷达扫描传感器精度验证
将激光雷达扫描传感器面向墙面水平放置,设置传感器扫描频率为25 Hz,角分辨率为0.25°,扫描起始角为-45°,扫描终止角为45°,静止扫描并获取多组数据进行分析。试验取180组传感器输出数据,每组数据包含361个角度和距离,原始数据如图3a所示,每个角度对应180个距离的标准差如图3b所示。
图3b中,在每个角度坐标点上对应着由180个距离值计算的标准差,其中最大值为14.07 mm,最小值为6.59 mm,平均值为8.79 mm。试验结果表明,相同测量点测量的距离离散程度较小,具有毫米级的测量精度,且角度越接近零测量精度越高,即传感器的输出数据稳定可靠。

图3 传感器数据Fig.3 Sensor data
2.2 三维点云数据的构建
本文以纺锤形仿真塑料树为探测对象,通过人工修剪得到仿真树枝叶稀疏与枝叶茂密2个靶标。试验用仿真树高为1.8 m,树冠宽为1.2 m,滑轨总长为1.36 m,滑块长为0.1 m,行驶总长为1.26 m。设置滑轨高度在树中心点,设置滑轨与仿真树底端距离为1/2树高,设置滑轨速度为1 m/s。根据靶标信息设置激光雷达传感器参数:扫描频率为25 Hz,角分辨率为0.25°,扫描起始角为-45°,扫描终止角为45°。靶标三维点云的构建步骤为:
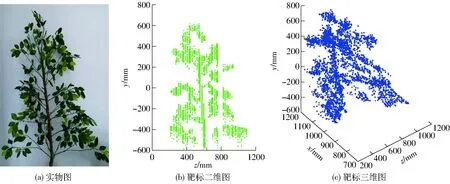
图4 枝叶稀疏靶标Fig.4 Target with sparse branches
(1)通过Visual Studio 2005开发应用程序采集激光束角度θ、距离γ以及相应位置的编码器脉冲数。
(2)将激光雷达扫描面二维极坐标(γ,θ)转化为直角坐标(X,Y),计算方法为

(5)
(3)通过编码器输出的脉冲数确定第三维坐标zi,编码器输出脉冲最大值为16 384,超过最大值将重新从零开始计数,基于编码器输出数据特征计算zi,计算方法为
(6)
式中Ls——滑轨行驶总长
M0——初始位置编码器脉冲数
Mn——终止位置编码器脉冲数
Mi——滑块当前位置的编码器脉冲数
m——编码器输出脉冲最大值
bi——数据拐点的个数
仿真树枝叶稀疏期和枝叶茂密期树冠实物图、二维图与三维点云图分别如图4、5所示。由图4、5可知,靶标探测系统输出的三维点云数据能够真实、有效地反映实物靶标的形态特点。
2.3 参数统计
基于靶标树冠高、宽、厚度参数,喷施区域为1.4 m×1.2 m×0.8 m的长方体,对其进行等比例网格划分,每个子区域为0.2 m×0.2 m×0.8 m的长方体,共计42个。统计各区域内叶片数nl与点云数np。
2.3.1叶片数统计
利用角钢材料搭建框架,依照网格尺寸进行布线,人工统计各区域内的叶片数,将统计的叶片数按喷施区域网络由上至下、由左至右依次输入到向量中。
统计结果为,枝叶稀疏靶标叶片数向量A=[0 0 0 0 0 0 0 0 4 18 5 9 18 14 1 9 19 9 17 15 8 0 4 25 16 18 7 4 0 0 4 5 14 22 11 0 0 0 0 0 6 11];枝叶茂密靶标叶片数向量B=[0 0 0 0 0 5 0 0 0 18 20 18 42 0 0 14 53 57 55 40 4 4 25 62 63 60 43 8 0 2 23 25 16 27 0 0 0 0 0 0 3 0]。
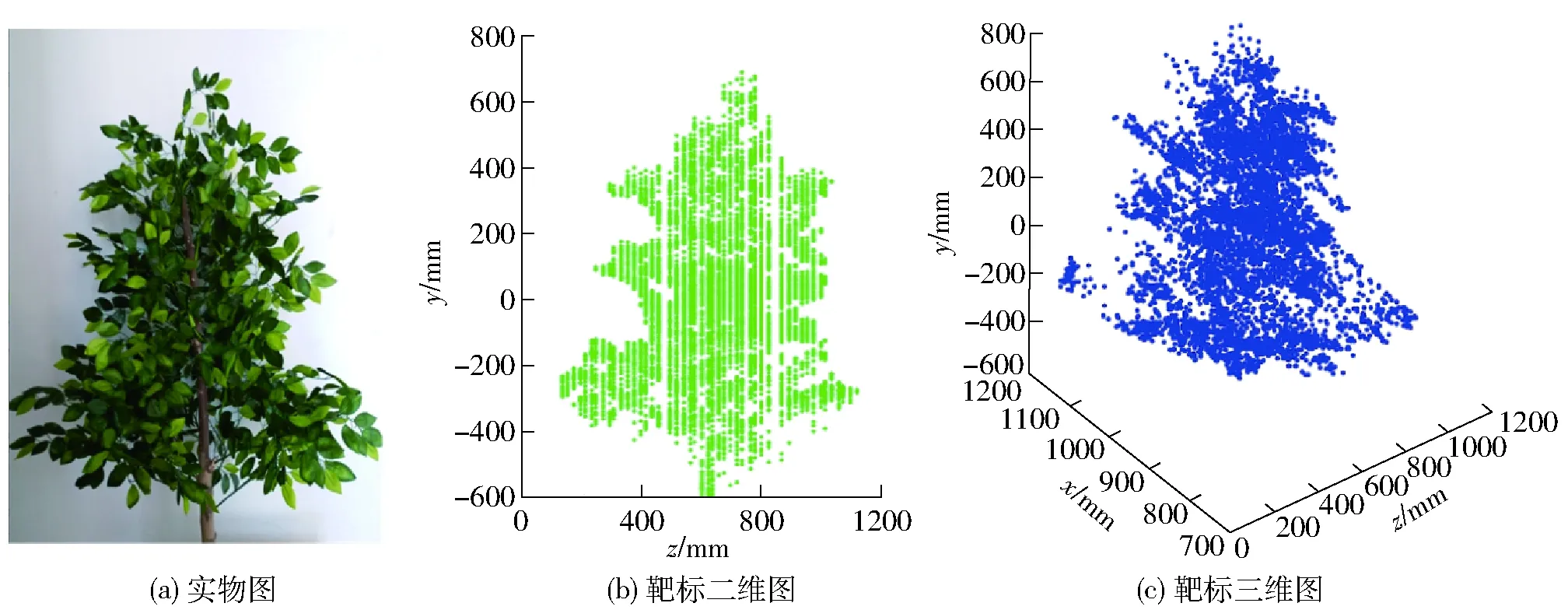
图5 枝叶茂密靶标Fig.5 Target with thick branches
2.3.2点云数统计
靶标探测系统以相同起点、按同一方向扫描靶标3次,利用累加法统计指定各区域内的点云数。枝叶稀疏靶标3次统计结果分别输入矩阵A1、A2、A3,枝叶茂密靶标3次统计结果分别输入矩阵B1、B2、B3。
统计结果为A1=[0 0 0 0 0 0 0 0 61 158 41 113 237 123 10 176 304 98 221 112 66 0 48 279 178 187 129 126 0 0 30 25 123 213 61 0 0 0 0 0 42 73],A2=[0 0 0 0 0 0 0 0 50 132 28 92 204 96 8 220 346 132 271 158 101 0 48 248 151 181 85 138 0 6 50 43 168 243 79 0 0 0 0 0 34 83],A3=[0 0 0 0 0 0 0 0 60 128 40 88 195 114 9 193 307 101 266 138 70 0 41 289 171 225 69 112 0 2 32 38 153 220 76 0 0 0 0 0 37 78]。B1=[0 0 0 0 1 72 0 0 1 96 183 244 315 1 0 127 353 368 376 379 59 49 296 413 442 406 344 112 0 6 239 249 181 276 3 0 0 0 0 0 57 0],B2=[0 0 0 0 0 64 0 0 1 112 214 251 318 1 0 104 349 363 419 378 64 46 313 443 482 429 367 122 0 12 246 234 193 304 9 0 0 0 0 0 27 0],B3=[0 0 0 0 0 80 0 0 1 102 196 240 316 1 0 115 350 364 396 378 63 47 327 422 460 415 352 116 0 8 248 242 190 280 7 0 0 0 0 0 40 0]。
将枝叶稀疏靶标与枝叶茂密靶标的扫描数据用图形表述,如图6、7所示。

图6 枝叶稀疏靶标3次扫描数据Fig.6 Three times scanning data for sparse target
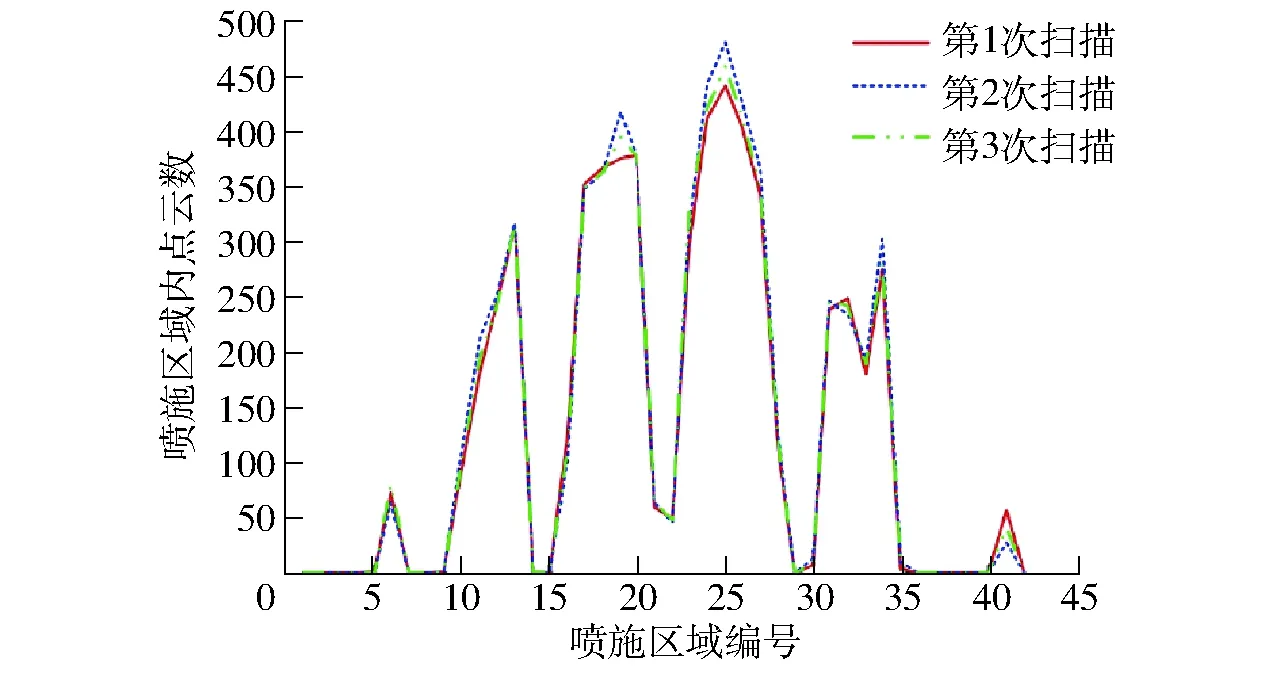
图7 枝叶茂密靶标3次扫描数据Fig.7 Three times scanning data for thick target
分别计算42个区域3次扫描数据的标准差,再对所有喷施区域计算的标准差求平均值,将该标准差均值与靶标各区域点云数的最大值相除,得到一个比值,比值越小说明3次扫描数据差距越小,计算方法为
(7)

xi——扫描数据
μj——各区域3次扫描数据的均值
σj——各区域扫描数据的标准差
N1——扫描次数,为3次
N2——喷雾区域个数,为42个
计算结果如表1所示。

表1 3次传感器扫描数据一致性分析Tab.1 Consistency analysis for three times scanning data
由图6、7以及表1中的计算结果可知,针对稀疏靶标与茂密靶标,传感器3次扫描数据的标准差均值与靶标各区域点云数的最大值的比值分别为0.02与0.01,因此,传感器3次扫描的输出数据一致性较好。
2.4 曲线拟合分析
基于Matlab曲线拟合工具箱cftool讨论叶片数nl与点云数np之间的函数关系,cftool工具箱包含多项式函数(9种类型)、高斯函数(8种类型)、指数函数(2种类型)、插值函数(4种类型)以及幂函数(2种类型)等,考虑算法复杂度影响系统实时性,选择各函数中阶次较低的算法进行拟合。工具箱得到的误差参数中,决定系数R2用于判定拟合优度,R2越接近1拟合效果越好。
为保证样本个数,将枝叶稀疏靶标与枝叶茂密靶标84个区域3次扫描数据共计252组叶片数nl与点云数np进行曲线拟合分析。经函数筛选,得到分析结果如图8所示。
高斯函数拟合方程nl=80.08e-[(np-605.5)/321.1]2,决定系数R2=0.925 7。

指数函数拟合方程nl=6.558e0.005 149np-6.576e-0.016 6np,决定系数R2=0.936 4。
拟合结果表明上述3种拟合函数的拟合效果均较好,其中指数函数的拟合效果最好。
2.5 相对误差分析
人工统计的叶片数nl与由点云数经拟合函数方程计算的叶片数n′l之间的相对误差el为

(8)
将枝叶稀疏靶标与枝叶茂密靶标共计84个区域按叶片茂密程度分为3种类型:叶片数在区间[40,70]的区域为枝叶茂密区域,叶片数在区间(20,40)的区域为枝叶中等茂密区域,叶片数在区间[1,20]的区域为枝叶稀疏区域。3种类型区域相对误差计算结果如表2所示。
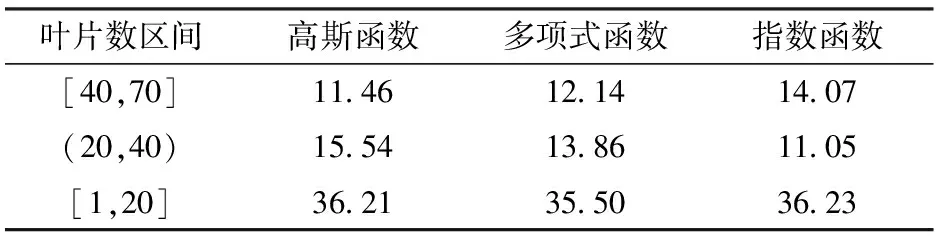
表2 相对误差统计结果Tab.2 Statistical results for relative error %
由表2可知,叶片数在区间[40,70]的区域,采用高斯函数拟合计算的叶片数与人工统计的叶片数之间的相对误差最小,为11.46%。叶片数在区间(20,40)的区域,采用指数函数拟合计算的叶片数与人工统计的叶片数之间的相对误差最小,为11.05%。叶片数在区间[1,20]的区域,采用多项式函数拟合计算的叶片数与人工统计的叶片数之间的相对误差最小,为35.50%,枝叶稀疏区域相对误差较大的原因为相应区域内存在靶标枝干部分,导致该区域叶片数少但返回的扫描点个数较多。
实际果园中,果树枝叶存在遮挡,冠层不同区域叶片面积大小与倾角存在差异,另一方面,果园路面不平,靶标探测系统的运载平台难以保持匀速直线运动,导致点云分布不均匀,上述问题均导致激光扫描传感器输出的实际扫描点个数与区域内所有叶片均被完全扫描的数据点个数之间存在一定差距。为此,利用冠层分析仪对果树靶标进行生态学统计分析,引入靶标形态校正系数;通过速度闭环控制减小系统运载平台的前进速度误差,使激光点云分布更均匀,引入点云分布校正系数;进而用点云数、形态校正系数与点云分布校正系数的组合模型表征叶面积密度参数补偿测量值与真实值之间的误差是今后的研究工作。
3 结论
(1)基于二维激光雷达扫描传感器构建了一种靶标精准探测系统,通过数据采集、坐标变换与数据处理获取了靶标的三维点云数据,且靶标精准探测系统3次扫描靶标输出数据的一致性表明探测系统稳定可靠。
(2)在假设各喷施子区域内叶片面积变化相对较小的条件下,分别基于高斯函数、多项式函数与指数函数对各喷施区域内叶片数与点云数参数进行了曲线拟合,决定系数均大于0.9,该结果表明叶片数与点云数之间存在一定的函数关系,点云数与叶片数经系数变换可得,点云密度参数与叶面积密度参数存在相同的函数关系,即通过点云密度可以计算叶面积密度作为靶标的几何特征参数。
(3)人工统计的叶片数与由点云数经拟合函数方程计算的叶片数之间的相对误差分析结果表明,在没有枝干干扰的靶标区域,由传感器数据计算的叶片数其相对误差最小为11.05%。
1 张海峰,许林云.果园喷雾机发展现状及展望[J].中国农机化学报,2014,35(3):112-118.
ZHANG Haifeng, XU Linyun. Summery of research status on orchard sprayer [J].Journal of Chinese Agricultural Mechanization, 2014, 35(3):112-118. (in Chinese)
2 邱白晶,闫润,马靖,等.变量喷雾技术研究进展分析[J/OL].农业机械学报,2015,46(3):59-72. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1amp;file_no=20150309amp;journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2015.03.009.
QIU Baijing, YAN Run, MA Jing, et al. Research progress analysis of variable rate sprayer technology [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3):59-72. (in Chinese)
3 翟长远,赵春江,王秀,等. 树型喷洒靶标外形轮廓探测方法[J].农业工程学报,2010,26(12):173-177.
ZHAI Changyuan, ZHAO Chunjiang, WANG Xiu, et al. Probing method of tree spray target profile [J]. Transactions of the CSAE,2010, 26(12): 173-177. (in Chinese)
4 张富贵,洪添胜,李建雄,等. 果树外形的检测方法[J]. 农机化研究,2008,30(12):107-109.
ZHANG Fugui, HONG Tiansheng, LI Jianxiong, et al. Experimental study on microwave drying mathematical model of Chinese Prickly Ash[J].Journal of Agricultural Mechanization Research, 2008,30(12):107-109. (in Chinese)
5 SCHUMANN A W, ZAMAN Q U. Software development for real-time ultrasonic mapping of tree canopy size [J]. Computers and Electronics in Agriculture, 2005, 47: 25-40.
6 GIL E, ESCOLA’ A, ROSELL J R, et al. Variable rate application of plant protection products in vineyard using ultrasonic sensors [J]. Crop Protection, 2007, 26: 1287-1297.
7 LLORENS J, GIL E, LLOP J, et al. Variable rate dosing in precision viticulture: use of electronic devices to improve application efficiency [J]. Crop Protection, 2010, 29: 239-248.
8 张富贵,沈明明,刘国志,等. 基于图像处理技术的果树树叶稀密程度的检测[J]. 山地农业生物学报,2013,32(6):517-521.
ZHANG Fugui, SHEN Mingming, LIU Guozhi, et al. Detection for the fruiter leaf density based on image processing technology [J]. Journal of Mountain Agricultural and Biology,2013, 32(6): 517-521. (in Chinese)
9 李松,张建瓴,可欣荣,等. 果树三维外形轮廓的仿真与重建[J]. 华南农业大学学报,2009,30(1):115-120.
LI Song, ZHANG Jianling, KE Xinrong, et al. Simulation and reestablishment of the fruit tree’s three-dimensional profile surface [J]. Journal of South China Agricultural University,2009, 30(1): 115-120. (in Chinese)
10 肖健.果树对靶喷雾控制系统中图像识别技术[D]. 北京:中国农业大学,2005.
XIAO Jian. Image recognition used in crown detection for orchard spraying system [D].Beijing: China Agricultural University, 2005. (in Chinese)
11 ROSELL J R, SANZ R. A review of methods and applications of the geometric characterization of tree crops in agricultural activities [J]. Computers and Electronics in Agriculture, 2012, 81: 124-141.
12 熊妮娜,王佳,罗旭,等.一种基于三维激光扫描系统测量树冠体积方法的研究——以油松为例[J].北京林业大学学报,2007,29(增刊2):61-65.
XIONG Nina, WANG Jia, LUO Xu, et al. Measuring tree crownvolume based on three dimension laser scanning and mapping system—takingPinustabulaeformisas a case[J]. Journal of Beijing Forestry University, 2007, 29(Supp.2):61-65. (in Chinese)
13 GIL E, LLORENS J, LLOP J, et al.Variable rate sprayer. part 2—vineyard prototype: design, implementation, and validation [J]. Computers and Electronics in Agriculture, 2013, 95: 136-150.
14 CHEN Y, ZHU H, OZKAN H E. Development of a variable-rate sprayer with laser scanning sensor to synchronize spray outputs to tree structures[J].Transactions of the ASABE,2012,55(3): 773-781.
15 俞龙,黄健,赵祚喜,等.丘陵山地果树冠层体积激光测量方法与试验[J/OL].农业机械学报, 2013,44(8):224-228.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1amp;file_no=20130838amp;journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2013.08.038.
YU Long, HUANG Jian, ZHAO Zuoxi, et al. Laser measurement and experiment of hilly fruit tree canopy volume[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(8):224-228. (in Chinese)
16 徐伟恒,冯仲科,苏志芳,等.一种基于三维激光点云数据的单木树冠投影面积和树冠体积自动提取算法[J].光谱学与光谱分析,2014,34(2):465-471.
XU Weiheng, FENG Zhongke, SU Zhifang, et al.An automatic extraction algorithm for individual tree crown projection area and volume based on 3D point cloud data[J]. Spectroscopy and Spectral Analysis,2014,34(2): 465-471. (in Chinese)
17 XU Weiheng, SU Zhifang, FENG Zhongke, et al. Comparison of conventional measurement and LiDAR-based measurement for crown structures [J]. Computers and Electronics in Agriculture, 2013, 98: 242-251.
18 韦雪花,王永国,郑君,等.基于三维激光扫描点云的树冠体积计算方法[J/OL].农业机械学报,2013,44(7):235-240.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1amp;file_no=20130741amp;journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2013.07.041.
WEI Xuehua,WANG Yongguo,ZHENG Jun, et al. Tree crown volume calculation based on 3-D laser scanning point clouds data [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013,44(7):235-240. (in Chinese)
19 MARTIN B, JEAN-LUC W, RICHARD A F. A model for deriving voxel-level tree leaf area density estimates from ground-based LiDAR[J]. Environmental Modelling amp; Software,2014,51: 184-189.
CalculationMethodofLeafAreaDensityBasedonThree-dimensionalLaserPointCloud
ZHANG Meina1LÜ Xiaolan1QIU Wei2LEI Xiaohui1YANG Qingsong3ZHANG Dongxin1
(1.InstituteofAgriculturalFacilitiesandEquipment,JiangsuAcademyofAgriculturalSciences,Nanjing210014,China2.CollegeofEngineering,NanjingAgriculturalUniversity,Nanjing210031,China3.InstituteofHorticulture,JiangsuAcademyofAgriculturalSciences,Nanjing210014,China)
Geometrical characteristic of the target is the basis to calculate pesticide dosage. In domestic and international research, volume was calculated usually as the control input of variable-rate spraying system. Compared with the volume parameter, leaf area density can avoid the errors caused by irregular canopy shape and lots of gaps in the canopy. Therefore, a method to extract the leaf area density based on the three-dimensional laser point cloud data was proposed. This method corresponded to the law that the branches and leaves were more, the leaf area was larger and the point clouds were more. A target detection system was set up, including a laptop, a light detection and ranging sensor, an incremental photoelectric encoder and an electronic slide. Three-dimensional laser point cloud of the target was obtained through the detection system moving along the line between the trees. According to the structure of the spraying system, the spraying area was partitioned into several spaces with the same scale, and the number of point clouds and leaves was counted respectively by computers and men in each sub-region. Based on the assumption which the leaf areas were almost the same in each spraying area, the function relationship between the number of point clouds and leaves was analyzed based on Matlab software cftool. The curve fitting results showed that the correlation coefficients between the leaf number and laser point number were 0.925 7, 0.931 and 0.936 4, respectively, with Gaussian function, polynomial function and exponential function, and the exponential function was the best. On the other hand, based on the above three functions, the minimum relative error of the thick area was 11.46%, the minimum relative error of the area between thick and sparse was 11.05%, and the minimum relative error of the sparse area was 35.5%. Then the leaf area density was calculated by the decided function and coefficient transformation. The calculation of the leaf area density from three-dimensional laser point provided a extra information for calculating the pesticide dosage. A statistic analysis on the real fruit trees and a optimizing for the target detection system were needed, more accurate function relationship between the laser point density and leaf area density would be calculated via the added correction coefficient.
variable-rate spraying; laser scanning; three-dimensional point cloud; point density; leaf area density
10.6041/j.issn.1000-1298.2017.11.021
S491
A
1000-1298(2017)11-0172-07
2017-03-01
2017-04-01
国家梨产业技术体系专项(CARS-29-18)、江苏省农业科技自主创新资金项目(CX(15)1023)和江苏省农业科学院基本科研业务费专项(ZX(16)3006)
张美娜(1986—),女,助理研究员,博士,主要从事精准变量施药控制系统研究,E-mail: zmnll22@163.com
吕晓兰(1980—),女,研究员,博士,主要从事施药技术与植保机械装备研究,E-mail: lxlanny@126.com