提土-全膜面覆土装置作业参数优化与试验
2017-12-04赵武云宋学锋辛尚龙刘凤军辛兵帮
戴 飞 赵武云 宋学锋 辛尚龙 刘凤军 辛兵帮
(1.甘肃农业大学机电工程学院, 兰州 730070; 2.酒泉市铸陇机械制造有限责任公司, 酒泉 735000)
提土-全膜面覆土装置作业参数优化与试验
戴 飞1赵武云 宋学锋1辛尚龙1刘凤军2辛兵帮2
(1.甘肃农业大学机电工程学院, 兰州 730070; 2.酒泉市铸陇机械制造有限责任公司, 酒泉 735000)
为进一步研究提土-全膜面覆土装置作业参数对其覆土性能及质量的影响,解析膜顶覆土过程与规律,建立了提土-覆土过程关键参数方程,确定了试验因素及其取值范围。以刮板升运带式提土器线速度、联合机前进速度和水平双向螺旋覆土装置转速为自变量,覆土合格率为响应值,进行二次旋转正交组合试验,构建各因素与覆土合格率之间的数学模型,并结合响应曲面对各因素交互作用进行分析,探知试验因素对覆土合格率影响的主次顺序为水平双向螺旋覆土装置转速、刮板升运带式提土器线速度和联合机前进速度,获得提土-全膜面覆土装置最优作业参数:水平双向螺旋覆土装置转速为432 r/min,刮板升运带式提土器线速度为1.56 m/s,联合机前进速度为0.50 m/s。田间验证试验表明,提土-全膜面覆土装置覆土合格率均值为99.6%,较优化前有显著提升;应用离散单元法进行提土-全膜面覆土装置在最优参数条件下的“提土-输土-覆土”动态作业过程模拟,仿真结果与田间试验验证工况基本一致,表明该装置作业参数的优化计算准确可靠。
马铃薯; 提土-全膜面覆土装置; 离散单元法; 参数优化
引言
马铃薯垄作膜上覆土自然破膜出苗栽培技术适宜于马铃薯大垄双行覆膜种植模式,即马铃薯垄作施肥播种覆膜后,在垄体顶部膜面上覆盖一层厚度为35~45 mm的土壤,使得植株幼苗依靠覆土重力作用而自行穿破地膜完成出苗[1-3]。该农艺技术能够避免人工二次放苗,节省劳力,有效保证种植马铃薯出苗整齐、青薯率低且增产效果显著。已有研究表明,垄体膜面覆土厚度及其质量是影响该项农艺栽培技术作业效果的关键因素之一[3]。
国外马铃薯种植机械化程度高,基本无铺膜覆土作业工序,但其机型大、价格昂贵,不适宜在我国西北旱地马铃薯产区应用[4-5]。国内研制了中小型系列化马铃薯垄作种植作业机,但关于样机携有膜顶全覆土装置鲜见报道,现有机型均不符合马铃薯大垄双行膜上覆土自然破膜出苗栽培种植新技术要求[6]。目前,覆膜种植机、铺膜机膜上相关覆土机构主要包括实现交叉排土、孔穴覆盖、条带覆盖功能的内螺旋覆土滚筒,应用于小麦全膜覆土穴播技术的前旋耕链板输土式覆土机构,与玉米全膜双垄沟播技术相结合的双垄耕作提土分流覆土机构,与马铃薯全膜双垄沟种植技术配套的刮板升运带式膜上覆土装置,由于上述覆土装备仅能实现在覆膜膜面局部、垄沟和膜侧完成覆土作业,因此均达不到在垄作模式下对垄体全膜面覆土的农艺技术条件[7-11]。
本文在研制的全膜面覆土式马铃薯播种联合作业机基础上,进一步研究联合作业机相关提土-全膜面覆土装置工作过程中的提土、输土与覆土质量,寻求各作业参数对垄体膜顶合格覆土厚度的影响规律,以期达到最优覆土质量的目的,为进一步推广马铃薯垄作膜上覆土自然破膜出苗栽培技术提供保障。
1 作业过程与建模
1.1 结构组成
全膜面覆土式马铃薯播种联合作业机的结构如图1所示,主要由提土-全膜面覆土装置、排肥系统、链勺式排种系统、垄体整形装置、垄体覆膜装置等部件组成[12]。

图1 全膜面覆土式马铃薯播种联合作业机结构简图Fig.1 Structure diagram of potato planter combined machine for covering soil on top of full film surface1.悬挂架 2.肥箱 3.排种装置 4.种箱 5.补种座 6.提土-全膜面覆土装置 7.膜侧覆土圆盘 8.展膜轮 9.覆膜挂接装置 10.起土铲 11.垄体整形装置 12.地轮 13.施肥开沟器
提土-全膜面覆土装置如图2所示,位于补种座后方,水平横跨至联合作业机后侧。该装置主要由左、右对称布置的刮板升运带式提土器,中间横向连接的水平双向螺旋覆土器,起土铲、输土罩壳及动力传动系统等组成。
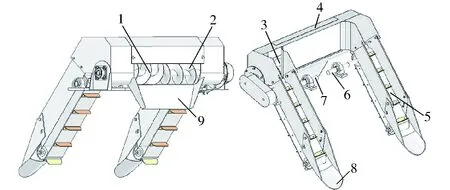
图2 提土-全膜面覆土装置结构示意图Fig.2 Structure diagrams of mechanism with elevating and covering soil on plastic-film1.左螺旋叶片 2.右螺旋叶片 3.水平双向螺旋覆土器 4.输土罩壳 5.刮板升运带式提土器 6.动力右半轴 7.动力左半轴 8.起土铲 9.溜土槽
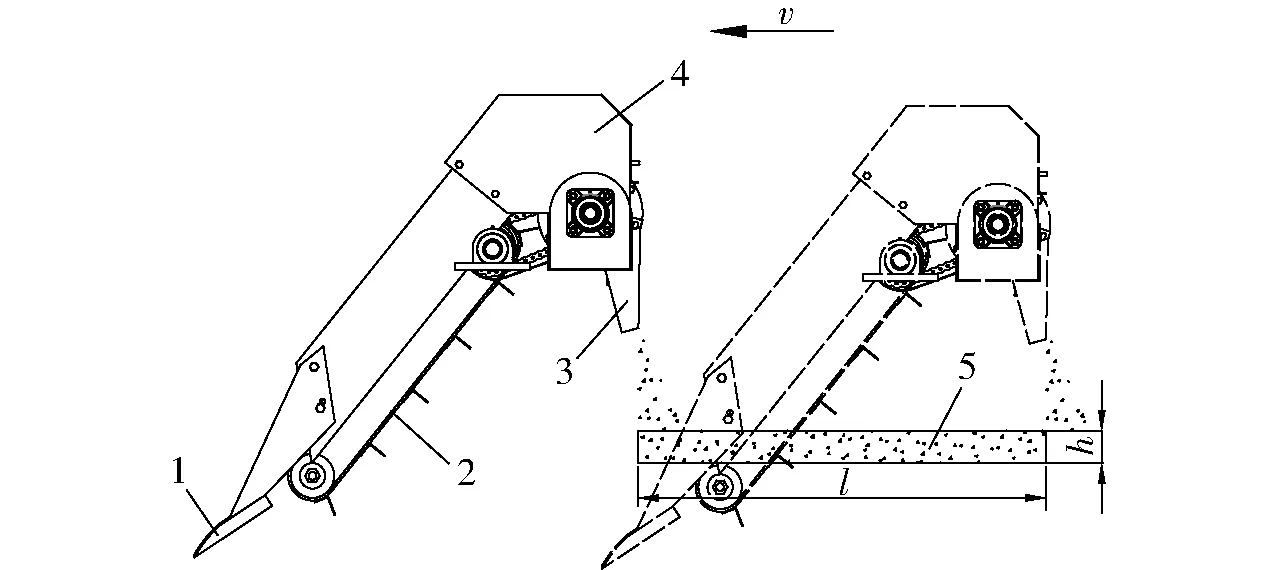
图3 膜顶覆土作业过程Fig.3 Schematic diagram of operation process of covering soil on plastic-film1.起土铲 2.刮板升运带式提土器 3.溜土槽 4.输土罩壳 5.垄体膜顶覆土层
1.2 作业过程
当联合机前进作业时(图3),提土-全膜面覆土装置传动系统促使动力左、右半轴转动进而带动刮板升运带式提土器运转,并将起土铲前行所掘起的田间土壤倾斜提升与输送。当升运土壤输送至装置输土罩壳两侧时,其在水平双向螺旋覆土器双侧螺旋叶片的居中作用下变向推送,使得土壤顺着中置溜土槽不断滑落,并均匀铺撒覆盖至大垄垄体膜顶部位。垄顶覆土宽度要求为800 mm,覆土厚度需保持在35~45 mm之间。
1.3 提土-覆土过程建模
如图3膜顶覆土作业过程所示,单位时间内垄顶覆土量除与刮板升运带式提土器线速度、水平双向螺旋覆土器转速有关外,联合机前进速度也是影响覆土合格率的关键因素。联合机前进速度过大,起土铲与田间土壤互作时间缩短,提土升运量不足,达不到覆土厚度要求,且易引起对覆盖地膜的拉扯,导致铺膜覆土作业失效;当联合机行进较慢时,垄体膜顶容易出现土壤堆积而使得覆土厚度不均匀。课题组前期试验研究表明,联合机作业速度控制在0.4~0.6 m/s时,作业性能较高且覆土质量相对稳定[12]。
为进一步解析膜顶覆土作业过程,获得提土-全膜面覆土装置作业参数取值范围,建立其作业过程相关参数方程。
垄体膜顶覆土量[12]为
Q=γlbh
(1)
其中
l=vt
式中Q——垄体膜顶覆土量,kg/h
v——联合机前进速度,取0.4~0.6 m/s
t——覆膜单位时间,取1 h
γ——土壤(黄绵土)容重,取1 300 kg/m3[11]
l——单位时间内膜顶覆土长度,m
b——膜顶覆土宽度,取0.80 m
h——膜顶覆土厚度,取0.035~0.045 m
由式(1)计算可得Q为52 416~101 088 kg/h。
依据提土-全膜面覆土装置对称布置的刮板升运带式提土结构,结合垄体膜顶覆土量,建立刮板升运带式提土器、水平双向螺旋覆土器联合作业参数与输土量之间的关系方程[12-13]为
(2)
式中Q1——装置左侧提土、螺旋输土量,kg/h
Q2——装置右侧提土、螺旋输土量,kg/h
v1——刮板升运带式提土器线速度,m/s
B——刮板升运带宽度,取0.21 m
H——刮板高度,取0.06 m
φ1——刮板升运带式提土器填充系数,取均值为0.86[13]
k——倾斜系数,刮板升运带式提土器倾斜角度为45°,查表取0.40[13]
n——水平双向螺旋覆土装置转速,r/min
D——水平双向螺旋叶片外径,取0.16 m
S——水平双向螺旋覆土装置螺距,取0.10 m
φ2——水平双向螺旋覆土装置填充系数,查表取0.50[13]
ε——倾斜输送系数,取1[13]
由式(2)得出Q1=Q2,为26 208~50 544 kg/h,v1为1.29~2.49 m/s,n为335~646 r/min。
2 试验材料与方法
2.1 试验材料
2016年4月20日,在甘肃省定西市安定区香泉镇应用全膜面覆土式马铃薯播种联合作业机进行马铃薯大垄双行覆膜种植试验,对样机携有的提土-全膜面覆土装置作业参数进行试验优化。选取试验地面积为0.62 hm2,地势平坦、无杂草,土壤为黄绵土,含水率为16.86%,土壤容重约为1 300 kg/m3,坚实度小于0.20 MPa。联合作业机配套动力为29.4 kW的常林沭河SH404型轮式拖拉机,作业速度控制在0.4~0.6 m/s,试验前对联合作业机进行调试,将提土-全膜面覆土装置起土铲倾角调整为15°,在覆膜挂接装置上安装(白色)卷状地膜(厚度为0.01 mm),并将膜侧覆土圆盘倾角调整至35°进行试验[12]。
2.2 试验方法
试验参照NY/T 987—2006《铺膜穴播机作业质量》标准和马铃薯垄作膜上覆土自然破膜出苗栽培技术对全膜面覆土作业效果的要求(膜顶土壤覆盖厚度在35~45 mm之间,符合该条件为覆土合格),以提土-全膜面覆土装置的覆土合格率为评价指标,进行垄体膜顶覆土试验。选取100 m×4 m试验田为测试区,在垄体膜顶选取20 mm×20 mm的面积为一个测试点,应用游标卡尺进行垄体膜顶覆土合格率测定。覆土合格率测定计算式为[7]

(3)
式中Y——覆土合格率,%
K0——覆土合格测试点数,个
K1——总试验测试点数,个
2.3 试验设计
依据式(2)计算结果,选取刮板升运带式提土器线速度x1(1.29~2.49 m/s)、联合机前进速度x2(0.4~0.6 m/s)和水平双向螺旋覆土装置转速x3(335~646 r/min)作为试验因素,以覆土合格率Y作为评价指标。试验采用三因素五水平正交旋转中心组合优化试验方法,选取各试验因素编码如表1所示,共实施20组响应面分析试验(表2,x1、x2、x3为因素编码值),每组试验重复进行5次,取5次测试结果的平均值作为试验结果,通过应用Design-Expert 8.06进行数据处理分析[14-15]。
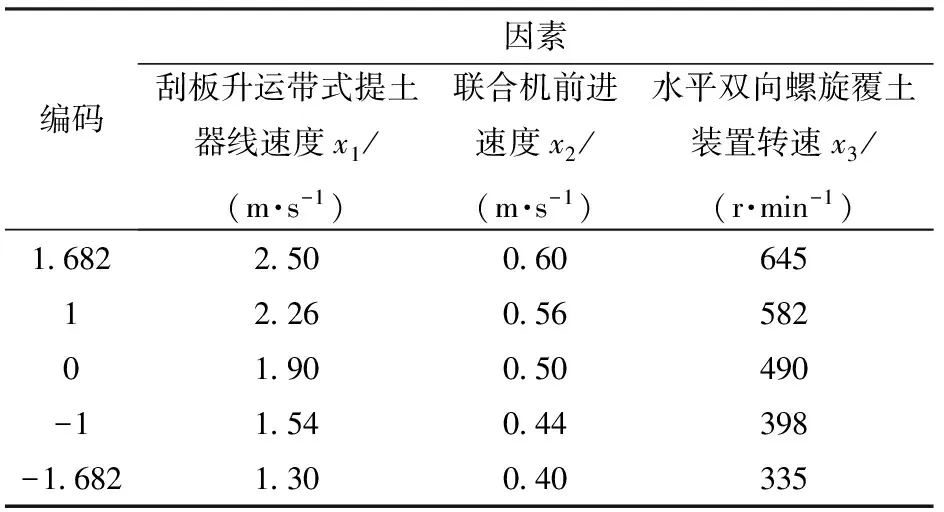
表1 试验因素编码Tab.1 Coding of factors
3 试验结果与分析
3.1 回归模型的建立及检验
试验结果如表2所示,提土-全膜面覆土装置作业后覆土合格率可达70.8%~96.8%,但其覆土性能及质量变化波动较大。
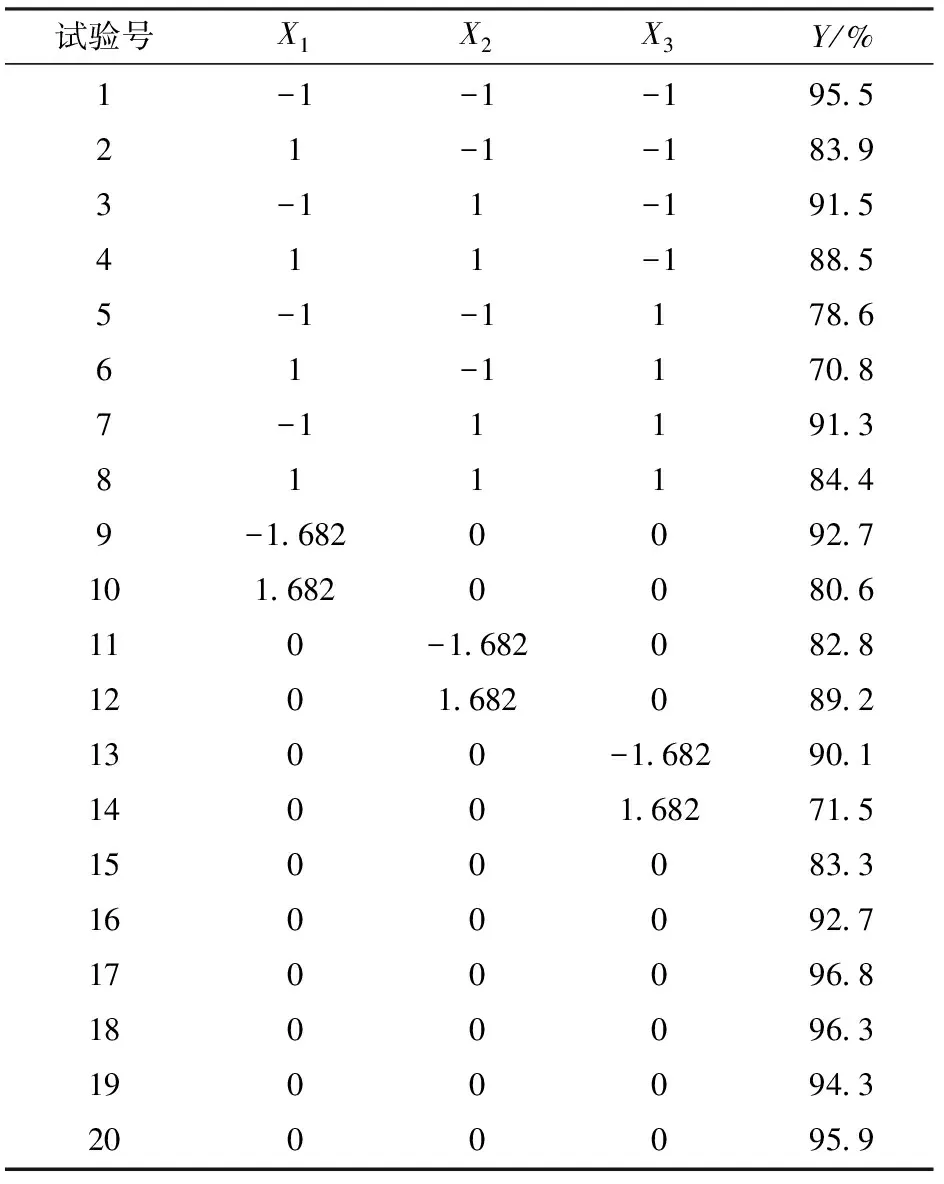
表2 正交试验设计分析结果Tab.2 Results of response surface analysis
借助Design-Expert 8.06软件对试验结果进行分析,获得覆土合格率Y的二次回归模型为

(4)
对式(4)二次回归模型进行方差分析和回归系数显著性检验,结果如表3所示。
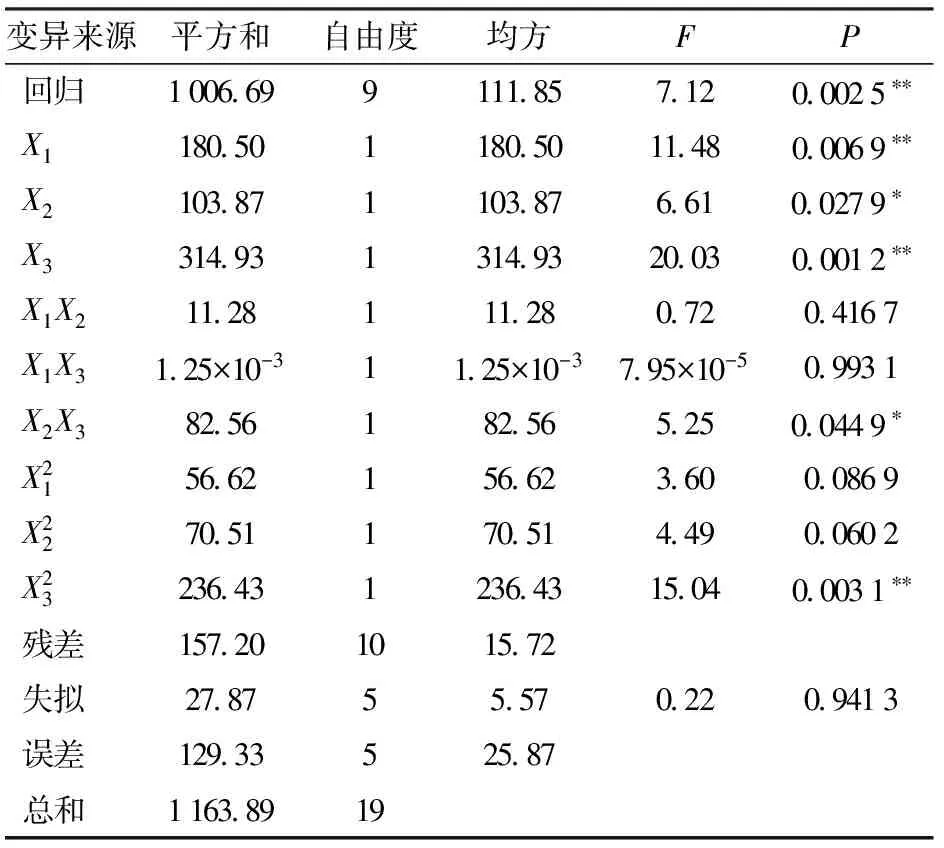
表3 回归方程方差分析Tab.3 Variance analysis of regression equation
注:*表示显著(Plt;0.05),** 表示极显著(Plt;0.01)。

试验过程中发现,联合作业机中置溜土槽排出土壤量的多少直接决定了垄体膜面的覆土厚度与质量,因此水平双向螺旋覆土装置转速对溜土槽内合格覆土量的保障至关重要。而刮板升运带式提土器的左、右对称布置能够保证进入水平双向螺旋覆土装置的土壤流均匀,使得膜顶覆盖土壤的厚度适中,对满足覆土合格率要求起到促进作用。同时,提土-全膜面覆土装置可根据联合机前进速度的变化对升运带式提土器线速度、水平双向螺旋覆土装置转速进行调整,以确保覆土量的合格与稳定。
3.2 模型交互项的解析
根据二次回归模型式(4)作出各因素之间关系的响应面图,响应曲面的形状能够反映出交互因素作用的强弱[10,16],结果如图4~6所示。

图5 刮板升运带式提土器线速度与水平双向螺旋覆土装置转速对覆土合格率的影响Fig.5 Impact of soil elevating scraper belt device speed and level of two-way spiral filling device speed on qualified rate of soil cover
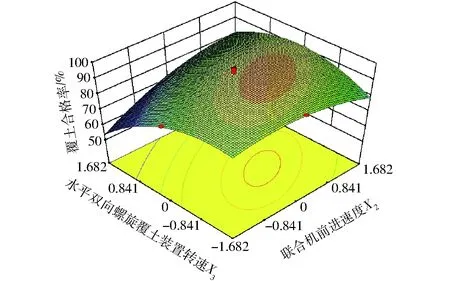
图6 联合机前进速度与水平双向螺旋覆土装置转速对覆土合格率的影响Fig.6 Impact of operation machine speed and level of two-way spiral filling device speed on qualified rate of soil cover
由图4可知,当提土-全膜面覆土装置作业时,刮板升运带式提土器线速度在1.30~1.90 m/s之间,联合机前进速度为0.50~0.60 m/s时,覆土合格率处于较大区域。由响应曲面变化趋势看出刮板升运带式提土器线速度对覆土合格率影响明显大于联合机前进速度的影响。这主要是在覆土作业过程中刮板升运带式提土器合理的线速度保证了充足且适宜量土壤的提升、运送,能够满足垄体膜顶覆土厚度35~45 mm需求;而联合机前进速度主要是在覆土厚度满足要求的前提下尽量保证覆土作业的一致性与均匀性。两试验因素对覆土合格率影响权重有所差异,这与方差分析结果相一致。
由图5可以看出,当刮板升运带式提土器线速度控制在0.50~0.56 m/s、水平双向螺旋覆土装置转速为398~490 r/min时,装置覆土合格率较高,由偏回归分析可以看出,刮板升运带式提土器线速度和水平双向螺旋覆土装置转速的交互作用对覆土合格率影响并不显著,与方差分析结果相同。
由图6可以看出,当联合机前进速度固定在某一水平,水平双向螺旋覆土装置转速由335 r/min递增至645 r/min时,覆土合格率呈现出先增大、后减小的总体变化趋势。产生该现象的主要原因是当水平双向螺旋覆土装置转速逐渐增大时,加快了对提升土壤的输送速率;在一定转速范围内,使得充足土壤通过中置溜土槽滑落对垄体膜顶进行固定与覆盖,保障了覆土合格率的稳定性。
试验中发现,水平双向螺旋覆土装置在旋转和随联合机前进的同时,沿其轴向两端同步向中置溜土槽输送土壤,其运动过程相对复杂。为了进一步分析其作业原理,以该装置为参考系,规定x轴为输土方向,y轴为联合机前进方向,对水平双向螺旋覆土装置输土运动学进行分析(图7,图中各变量下标1、2分别表示装置左侧和右侧螺旋叶片处)[17-18]。
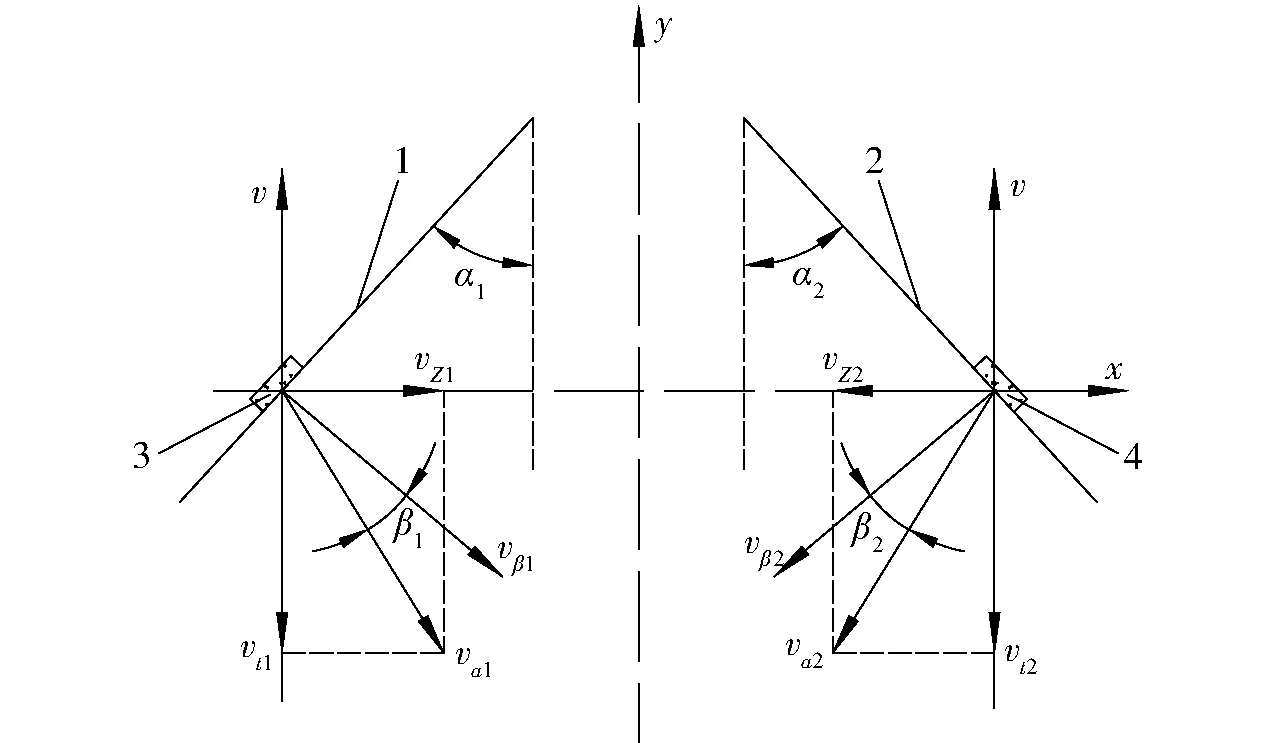
图7 水平双向螺旋覆土装置速度分解图Fig.7 Speed decomposition of level of two-way spiral filling device1.左侧螺旋叶片 2.右侧螺旋叶片 3.左叶片泥土颗粒 4.右叶片泥土颗粒
根据图7建立水平双向螺旋覆土装置输土运动方程[18]为
(5)
式中vZ——输送土壤轴向分速度,m/s
vt——输送土壤周向分速度,m/s
μ——泥土颗粒与螺旋面摩擦因数
r——输送土壤所在螺旋线的半径,m
由式(5)可知,当水平双向螺旋覆土装置转速进一步增大时,螺旋输送土壤的周向分速度变大,容易在垂直于输送方向产生跳跃翻滚,出现不均匀的“脉动现象”,使得覆土合格率有所降低,这与图6响应曲面分析结果一致。由偏回归分析与等高线密度可以得出,水平双向螺旋覆土装置转速对覆土合格率的影响大于联合机前进速度的影响。
3.3 作业参数优化与试验验证
为保证提土-全膜面覆土装置作业时垄体膜顶覆土合格率为100%,应用Design-Expert 8.06软件中Optimization-Numerical模块对回归方程模型进行该目标下优化求解,得到提土-全膜面覆土装置最优作业参数:水平双向螺旋覆土装置转速为432 r/min,刮板升运带式提土器线速度为1.56 m/s,联合机前进速度为0.50 m/s。
为验证模型式(4)的可靠性,采用提土-全膜面覆土装置的最优作业参数进行6次覆土性能试验。试验结果表明,验证试验的覆土合格率均值为99.6%,较优化前覆土合格率(70.8%~96.8%)有明显提升,表明在优化作业参数条件下能够避免垄体膜顶覆土厚度的不均匀及“脉动现象”产生,符合马铃薯垄作膜上覆土自然破膜出苗栽培技术要求,因此该回归模型是可靠的。
4 覆土作业过程仿真
4.1 参数设置
为进一步研究提土-全膜面覆土装置在应用最优作业参数时的提土、输土、覆土动态工作特性,采用离散单元法EDEM对装置覆土作业过程进行数值模拟。其中,覆土土壤颗粒选取球体颗粒建模,其直径设定为3 mm,土壤颗粒-土壤颗粒、土壤颗粒-升运带式刮板、壁面接触模型选择Hertz-Mindlin(no-slip),仿真试验参数如表4所示[19-21]。
仿真时间步长1.405×10-5s,是瑞利时间步的40%,仿真共进行4 s。根据提土-全膜面覆土装置结构设计,刮板升运带式提土器单侧刮板为10个,两刮板间距离设置为130 mm,运动通过EDEM中coupling server面板,由动力学耦合来控制,依据作业参数优化值,线速度设为1.56 m/s。在Geometry面板给水平双向螺旋覆土装置添加线性旋转运动,转速设为432 r/min。颗粒工厂是160 mm×180 mm的长方形平面。单侧颗粒工厂每秒生成土壤颗粒数为1.447×107个。
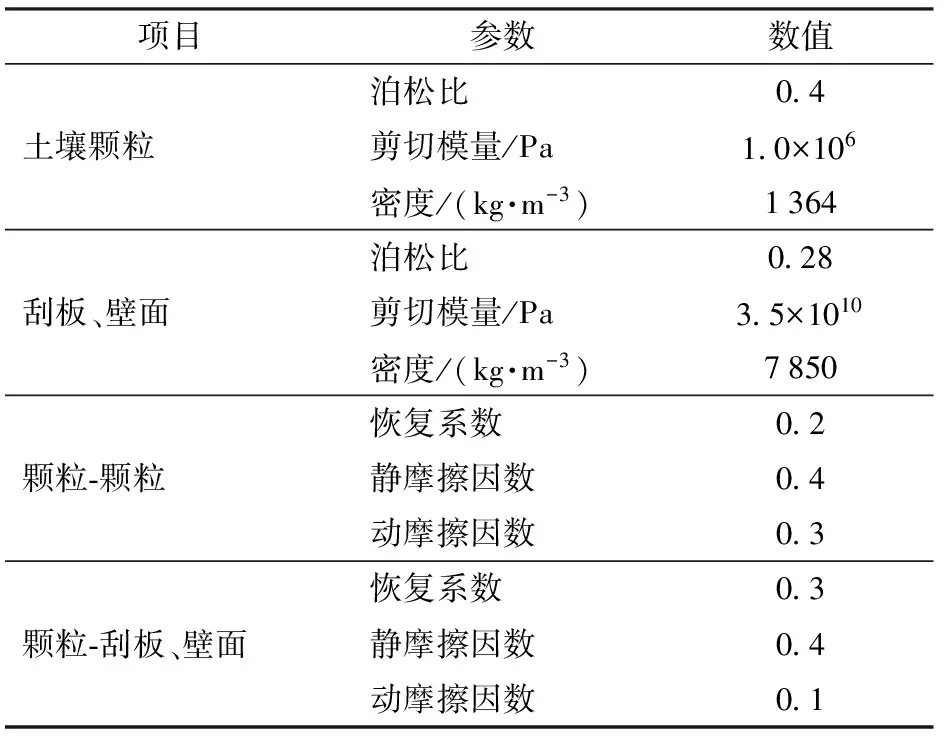
表4 物性及接触参数Tab.4 Parameters of materials and contact
4.2 提土-全膜面覆土仿真
图8所示为提土-全膜面覆土装置在最优作业参数设置下的膜顶覆土仿真过程。
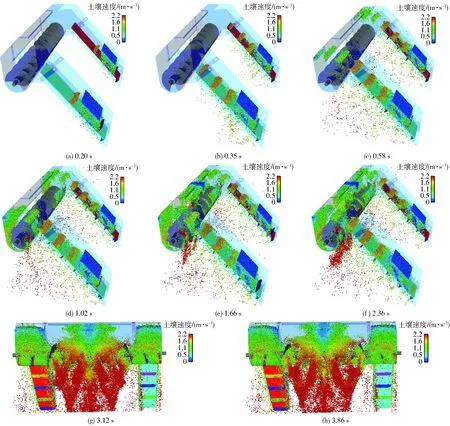
图8 提土-全膜面覆土过程仿真模拟Fig.8 Simulation operation process of elevating and covering soil on plastic-film
在提土-全膜面覆土模拟仿真前0.5 s内为颗粒生成与刮板升运带式提土器填充时段。当仿真时间为0.58 s时(图8c),刮板升运带上方土壤已经足量填充并开始逐渐进入水平双向螺旋覆土装置;1.02 s时(图8d)覆土装置中置溜土槽处出现少量、不连续的土壤颗粒流,此时输土罩壳内的土壤填充不均匀,水平双向螺旋覆土装置两侧土壤堆积较多,而中间部分仅有小部分土壤留存;1.66~2.36 s时(图8e、8f)中置溜土槽覆土土壤逐步形成连贯颗粒流,且土壤颗粒流量逐渐增大;3.12 s时(图8g)水平双向螺旋覆土装置趋于稳定的覆土输送状态,此时同一高度的土壤颗粒流厚度相对均匀一致;3.86 s时(图8h)水平双向螺旋覆土装置达到稳定的工作状态,经中置溜土槽作用的覆土土壤颗粒流最终呈“幕帘状”下落,达到垄体膜顶覆土的作业要求。提土-全膜面覆土过程仿真模拟与田间覆土合格率验证试验(图9)基本一致,表明相关参数的优化计算可靠有效。

图9 覆土合格率验证试验Fig.9 Verification test of qualified rate of soil cover
5 结论
(1) 建立了提土-全膜面覆土装置作业过程关键参数方程,确定出优化试验因素组成及其取值范围。采用二次旋转正交组合试验方法,进行提土-全膜面覆土装置作业参数优化与试验,通过试验优化结果获得影响覆土合格率的因素由大到小依次为水平双向螺旋覆土装置转速、刮板升运带式提土器线速度和联合机前进速度。
(2) 建立了覆土合格率与水平双向螺旋覆土装置转速、刮板升运带式提土器线速度、联合机前进速度的二次多项式回归模型。以垄体膜顶覆土全部合格(Y=100%)为目标,获得提土-全膜面覆土装置最优作业参数:水平双向螺旋覆土装置转速为432 r/min,刮板升运带式提土器线速度为1.56 m/s,联合机前进速度为0.50 m/s。田间验证试验表明,提土-全膜面覆土装置覆土合格率均值为99.6%,较优化前有明显提升。
(3)应用离散单元法进行提土-全膜面覆土装置在最优参数条件下的“提土-输土-覆土”动态作业过程模拟,仿真结果与田间试验验证工况基本一致,表明该装置作业参数的优化计算可靠有效,作业性能符合马铃薯垄作膜上覆土自然破膜出苗栽培技术要求。
1 唐继军,张静,段叶飞,等. 8种作物自动破膜效应研究[J]. 中国农学通报,2011,27(12):244-248.
TANG Jijun, ZHANG Jing, DUAN Yefei, et al. Study on the effects of eight kinds of crops spontaneously puncture of plastic-film[J]. Chinese Agricultural Science Bulletin, 2011, 27(12): 244-248. (in Chinese)
2 杨忠娜,唐继军,张立峰. 土下覆膜播种方式作物自动破膜出苗效应[J]. 干旱地区农业研究,2012,30(5):61-65.
YANG Zhongna, TANG Jijun, ZHANG Lifeng. A study on self-puncture effect of different crops in sub-soil planting with film mulching[J]. Agricultural Research in the Arid Areas, 2012, 30(5): 61-65. (in Chinese)
3 杨来胜,王程,何培洪,等. 西北地区马铃薯膜上覆土最佳土层厚度试验[J].农学学报,2016,6(7):60-63.
YANG Laisheng, WANG Cheng, HE Peihong, et al. Optimum thickness of covering soil on plastic films of potato cultivation in northwest China[J]. Journal of Agriculture, 2016, 6(7): 60-63. (in Chinese)
4 吕金庆,田忠恩,杨颖,等. 马铃薯机械发展现状、存在问题及发展趋势[J]. 农机化研究,2015,37(12):258-263.
LÜ Jinqing, TIAN Zhong’en, YANG Ying, et al. The development situation, existing problems and development trend of potato machinery [J]. Journal of Agricultural Mechanization Research, 2015, 37(12): 258-263. (in Chinese)
5 KHALID A, AI G. Performance evaluation of a cup-belt potato planter at different operation conditions and tuber shapes [J]. American-Eurasian J. Agric.amp;Environ. Sci., 2011, 10(5):821-828.
6 吕金庆,杨颖,李紫辉,等. 舀勺式马铃薯播种机排种器的设计与试验[J]. 农业工程学报,2016,32(16):17-25.
LÜ Jinqing, YANG Ying, LI Zihui, et al. Design and experiment of cup-belt type potato seed-metering device[J]. Transactions of the CSAE, 2016, 32(16): 17-25. (in Chinese)
7 赵立军,何堤,周福君. 2BF-1400 型水稻覆膜播种机覆土机构参数优化与试验[J]. 农业工程学报,2015,31(8):21-26.
ZHAO Lijun, HE Di, ZHOU Fujun. Parameter optimization and test on soil-covering mechanism of 2BF-1400 rice mulching film seeder machine[J]. Transactions of the CSAE, 2015, 31(8): 21-26. (in Chinese)
8 XU Zhuxin, TIAN Lizhong, SHANG Shuqi, et al. Design and experiment of 2BFD-4 type peanut membrane planter[J]. Transactions of the CSAE, 2012, 28(Supp.2): 13-17.
9 唐学鹏,赵武云,戴飞,等. 旱地小麦全膜覆土播种一体机的研制[J]. 干旱地区农业研究,2013,31(6):248-251.
TANG Xuepeng, ZHAO Wuyun, DAI Fei, et al. Design and manufacture of an integrated machine to spread membrane covering soil and seeding for dry land wheat [J]. Agricultural Research in the Arid Areas, 2013, 31(6): 248-251. (in Chinese)
10 戴飞,赵武云,马明义,等. 双垄耕作施肥喷药覆膜机工作参数优化[J/OL]. 农业机械学报,2016,47(1):83-90.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160112amp;flag=1. DOI: 10.6041/j.issn.1000-1298.2016.01.012.
DAI Fei, ZHAO Wuyun, MA Mingyi, et al. Parameters optimization of operation machine for tillage-fertilization and spraying-filming on double ridges[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1):83-90. (in Chinese)
11 孙伟,刘小龙,石林榕,等. 刮板升运带式膜上覆土装置覆土特性[J]. 机械工程学报,2016,52(7):38-45.
SUN Wei, LIU Xiaolong, SHI Linrong, et al. Covering soil on plastic-film characteristics of scraper lifting belt mechanism[J]. Journal of Mechanical Engineering,2016,52(7): 38-45. (in Chinese)
12 戴飞,辛尚龙,赵武云,等. 全膜面覆土式马铃薯播种联合作业机设计与试验[J/OL]. 农业机械学报,2017,48(3):76-83,56.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170309amp;flag=1. DOI: 10.6041/j.issn.1000-1298.2017.03.009.
DAI Fei, XIN Shanglong, ZHAO Wuyun, et al. Design and experiment of potato planter combined machine for covering soil on the top of full film surface[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 76-83,56. (in Chinese)
13 中国农业机械化科学研究院. 农业机械设计手册:下册[M]. 北京:中国农业科学技术出版社,2007.
14 葛云,张立新,谷家伟,等. 对辊式红花采收装置参数优化及试验[J]. 农业工程学报,2015,31(21):35-42.
GE Yun, ZHANG Lixin, GU Jiawei, et al. Parameter optimization and experiment of dual roller harvesting device for safflower[J]. Transactions of the CSAE, 2015, 31(21):35-42. (in Chinese)
15 高筱钧,周金华,赖庆辉. 中草药三七气吸滚筒式精密排种器的设计与试验[J]. 农业工程学报,2016,32(2):20-28.
GAO Xiaojun, ZHOU Jinhua, LAI Qinghui. Design and experiment of pneumatic cylinder precision seed-metering device for panax notoginseng[J]. Transactions of the CSAE, 2016, 32(2):20-28. (in Chinese)
16 袁雪,祁力钧,王虎,等. 温室摇摆式变量弥雾机喷雾参数响应面法优化[J/OL].农业机械学报,2012,43(4):45-50.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20120410amp;flag=1. DOI: 10.6041/j.issn.1000-1298.2012.04.010.
YUAN Xue, QI Lijun, WANG Hu, et al. Spraying parameters optimization of swing, automatic variables and greenhouse mist sprayer with response surface method[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(4):45-50. (in Chinese)
17 彭飞,李腾飞,康宏彬,等. 小型制粒机喂料器参数优化与试验[J/OL]. 农业机械学报,2016,47(2):51-58.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160207amp;flag=1. DOI: 10.6041/j.issn.1000-1298.2016.02.007.
PENG Fei, LI Tengfei, KANG Hongbin, et al. Optimization and experiment on feeder for small-scale pellet mill[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(2):51-58. (in Chinese)
18 杨文武,罗锡文,王在满,等. 轮式拖拉机水田轮辙覆土装置设计与试验[J]. 农业工程学报,2016,32(16):26-31.
YANG Wenwu, LUO Xiwen, WANG Zaiman, et al. Design and experiment of track filling assembly mounted on wheeled-tractor for paddy fields[J]. Transactions of the CSAE, 2016, 32(16):26-31. (in Chinese)
19 黄玉祥,杭程光,苑梦婵,等. 深松土壤扰动行为的离散元仿真与试验[J/OL]. 农业机械学报,2016,47(7):80-88.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160712amp;flag=1. DOI: 10.6041/j.issn.1000-1298.2016.07.012.
HUANG Yuxiang, HANG Chengguang, YUAN Mengchan, et al. Discrete element simulation and experiment on disturbance behavior of subsoiling[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7):80-88. (in Chinese)
20 方会敏,姬长英,FARMAN Ali Chandio,等. 基于离散元法的旋耕过程土壤运动行为分析[J/OL]. 农业机械学报,2016,47(3):22-28.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160304amp;flag=1. DOI: 10.6041/j.issn.1000-1298.2016.03.004.
FANG Huimin, JI Changying, FARMAN Ali Chandio, et al. Analysis of soil dynamic behavior during rotary tillage based on distinct element method[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3):22-28. (in Chinese)
21 贾富国,姚丽娜,韩燕龙,等. 基于离散元法的糙米匀料盘仿真优化设计[J]. 农业工程学报,2016,32(4):235-241.
JIA Fuguo, YAO Li’na, HAN Yanlong, et al. Simulation and optimal design of uniform plate of brown rice based on discrete element method[J]. Transactions of the CSAE, 2016, 32(4):235-241. (in Chinese)
OperatingParameterOptimizationandExperimentofDevicewithElevatingandCoveringSoilonPlastic-film
DAI Fei1ZHAO Wuyun1SONG Xuefeng1XIN Shanglong1LIU Fengjun2XIN Bingbang2
(1.CollegeofMechanicalandElectricalEngineering,GansuAgriculturalUniversity,Lanzhou730070,China2.JiuquanZhulongMachineryManufacturingCo.,Ltd.,Jiuquan735000,China)
The objectives were to study on operating parameters influence of the covering soil performance and covering soil quality with the device, and analyzing the process and regulation of covering soil on plastic-film, setting up the key parameters equation of process of elevating and covering soil on plastic-film, and determining the test factors and its scope. Quadratic rotation orthogonal combination experiment was carried out. Parameters such as soil elevating scraper belt device speed, operation machine speed, level of two-way spiral filling device speed were selected as independent variables, which would influence qualified rate of soil cover. The mathematical model was established, and then the effects of various parameters and their interactions were analyzed as well. The test results showed that effects order of three parameters on qualified rate of soil cover were as follows: level of two-way spiral filling device speed, soil elevating scraper belt device speed and operation machine speed. The optimal working parameters of device were level of two-way spiral filling device speed of 432 r/min, soil elevating scraper belt device speed of 1.56 m/s and operation machine speed of 0.50 m/s. Confirmatory tests showed that the average value of qualified rate of soil cover was 99.6%, which was promoted significantly compared with that before optimization. Discrete element method was applied to simulate the device with elevating and covering soil on plastic-film dynamic operation process under the condition of optimal parameters of elevating, conveying and covering soil. The simulation result was consistent with the field test conditions, which showed that the device optimization operation parameters calculation was accurate and reliable.
potato; device with elevating and covering soil on plastic-film; discrete element method; parameters optimization
10.6041/j.issn.1000-1298.2017.11.011
S223.2
A
1000-1298(2017)11-0088-09
2016-12-18
2017-01-19
农业部公益性行业科研专项(201503105)和甘肃省科技重大专项计划项目(143NKDF016)
戴飞(1987—),男,讲师,博士生,主要从事北方旱区作物生产装备工程研究,E-mail: daifei@gsau.edu.cn
赵武云(1966—),男,教授,博士生导师,主要从事北方旱区作物生产装备工程研究,E-mail: zhaowy@gsau.edu.cn