建筑塔机溜钩故障分析及防止对策
2017-11-27王继东闫玉萍
王继东, 闫玉萍, 李 晶
(1. 郑州工程技术学院 土木工程学院, 河南 郑州 450044; 2. 郑州铁路职业技术学院 建筑工程系, 河南 郑州 451460)
建筑塔机溜钩故障分析及防止对策
王继东1, 闫玉萍2, 李 晶1
(1. 郑州工程技术学院 土木工程学院, 河南 郑州 450044; 2. 郑州铁路职业技术学院 建筑工程系, 河南 郑州 451460)
采用分类分析法和理论分析法,对塔机溜钩故障进行了系统的分析,详述了引起塔机溜钩故障的各种可能原因,并为塔机设计、制造和使用者提供了避免溜钩发生、保证塔机安全的应对策略。
塔式起重机; 溜钩; 机械传动系统; 电气控制系统
建筑用塔式起重机(以下简称塔机)的安全运行直接关系到建设工程的施工进度以及设备和人身安全。多年来塔机的溜钩故障一直是困扰塔机用户的一个重要难题。在工程建设过程中,塔机的溜钩故障时有发生、甚至会反复发生。塔机出现溜钩,轻则会造成所吊物体难以准确就位、影响施工进度,重则会造成设备损坏和人身安全,每年因溜钩故障造成的经济损失非常巨大,为此有必要对塔机的溜钩故障进行深入研究和分析。本文将从起升机构的构成和工作原理出发,系统地对塔机的溜钩原因和防止对策进行深入探讨。
1 塔机起升机构的构成及工作原理
起升机构是塔机最基本的工作机构,起升机构主要由机械传动系统、电气控制系统和安全保护系统组成。机械传动机构是升降机构工作的执行机构,典型的起升机构机械传动系统见图1。
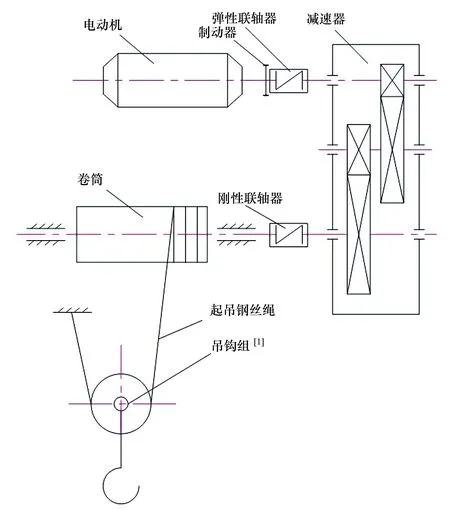
图1 起升机构的机械传动系统
电气控制系统用于控制机械传动机构的运转和操作,主要由操作手柄、逻辑电路、调速系统等组成。
安全保护系统用于保障起升机构在安全区域内工作而不发生事故,主要包括超载限制器、高度限位器、超速开关等。
起升机构工作原理:在电气控制系统和安全保护系统的控制和保护下,电动机正向或者反向旋转,并通过联轴器、减速器带动卷筒旋转,将钢丝绳卷入或放出,经过滑轮系统实现吊钩上升或下降;或者电动机停转、制动器抱闸使吊钩连同货物静止在空中。起升机构工作流程见图2。
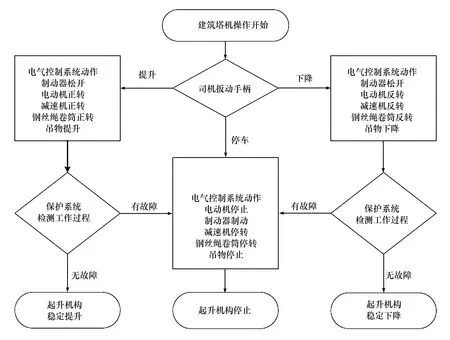
图2 起升机构工作流程
2 溜钩的概念及分类
起升机构运行或停车时,所吊物体超标下滑或失控下落[2]的现象称作溜钩。为了便于对溜钩分析,根据起升机构的工作原理和操作过程把溜钩分为以下5种情况:
(1) 停车制动时的溜钩。电气控制过程停止,电动机停转,制动器制动,货物下滑行程超过50~60 mm[3]或者失控下落。
(2) 制动过程中的溜钩。手柄从运行档位扳回零位,从电动机开始减速、制动器开始制动到制动过程结束的期间内,货物下溜或失速下落。
(3) 提升操作过程中的溜钩。手柄从零位扳到提升工作档位,制动器打开,电动机开始加速,直到稳定运行,货物下溜或失控下落。
(4) 下降操作过程中的溜钩。手柄从零位扳到下降工作档位,制动器打开,电动机开始加速直到稳定运行,货物发生下溜或失控下落。
(5) 因违章操作引起的溜钩。
3 溜钩的原因分析及防止对策
从上述起升机构的组成和操作原理可知影响起升机构运行和停车的关键部件是电动机、制动器、电气控制系统以及安全保护系统。
3.1 停车制动时的溜钩
制动器是保证起重机安全运行的重要部件,塔机在设计时,一般选用电力液压块式制动器,并要求在起升机构停车,电动机失去动力后,制动器的制动转矩必须大于所吊货物产生的静转矩,以保证起吊货物可靠停在空中某个位置。并具有足够的安全裕度,即满足公式:
Mze≥Kz·Mj[4]
(1)
式中,Mze为制动器的额定制动力矩;Mj为起升机构额定载荷所产生的静力矩;Kz为制动器的安全系数。
设计起升机构时,不仅要满足式(1)和Kz的要求,还要符合GB/T3811—2008起重机设计规范[5]的要求。制动器的额定制动力矩具有很大的安全系数(工作级别和使用场合不同,Kz=1.5,1.75,2.0,2.4),所以理论上,停车制动时应不会发生溜钩故障。但是,在实际的工作中,制动器的实际制动力矩即制动块与制动轮之间的摩擦力矩有(其他类型制动器计算方法基本类似):
Mz=NμD
(2)
式中:Mz为制动器的实际工作力矩;N为瓦块的正压力;μ为摩擦系数;D为制动轮直径。
N、μ、D这3个参数会随着气候、环境、设备的运行状况的改变而变化,当制动器的实际制动力矩小于货物的静力矩时,就会出现停车制动时的溜钩。所以引起3个参数减小的原因就是发生这类溜钩的主要原因。
3.1.1 制动块和制动轮间的摩擦系数μ降低
(1) 当制动轮表面有油污、被雨淋或受潮时,会造成制动面摩擦系数μ减小,导致制动力矩减小,引起溜钩故障的发生。预防对策:在塔机的使用过程中,要对起升机构制动器做好防护,使制动轮表面保持清洁和干燥,避免油污、油漆、润滑油或其他杂物黏附,避免雨水喷淋,保持摩擦系数的恒定,防止因摩擦系数降低导致溜钩故障的发生。
(2) 制动间隙过小或打开不均匀,制动器在制动过程中两侧或一侧的间隙过小[6],造成制动块与制动轮频繁摩擦,制动轮严重发热引起摩擦系数降低产生溜钩故障。
预防对策:按照制动器产品说明书的技术要求,定期均匀调整制动间隙。
3.1.2 制动块和制动轮间的正压力降低
(1) 制动器杠杆系统中某些活动关节(铰链)被卡住,造成停车时正压力减小,引起制动力矩减小或消失,导致溜钩故障的发生。
预防对策:定期用润滑油润滑活动关节,保持活动关节动作灵活。
(2) 主弹簧过松、制动间隙过大或推杆行程不到位,造成停车时正压力减小,导致溜钩故障发生。
预防对策:按产品说明书定期调整主弹簧松紧、制动间隙和推杆行程。
3.1.3 制动轮的直径减小
制动轮表面磨损严重,致使制动轮直径D减小,制动器制动力矩减小,导致溜钩故障的发生。
预防对策:及时更换制动轮。
3.2 制动过程中的溜钩
从司机给出停车指令到电动机完全停止、制动器完全闭合这一过程称为制动过程。在这个过程中,随着电气控制系统控制过程的结束,电动机的电磁转矩Mdc逐渐减少,制动器的制动力矩Mzd逐渐增加。如果由于某种原因的变化造成Mdc+Mzdlt;MJ,就会造成起吊货物的失控下溜。主要原因如下:
(1) 在制动过程中,线路电压太低[9]使电动机的工作力矩低于负载力矩[7],或电动机突然失电,而此时制动器还没有完全制动,会导致Mdc+Mzdlt;MJ引起溜钩故障。
预防对策:定期检查和维护电气控制系统,保证供电电源的可靠性;保证起重机内部电压降不超过5%[8]。
(2) 电气控制系统的控制程序错误,制动器制动动作延时,即制动器在电动机的电磁转矩过小或完全消失后才开始闭合,导致Mdc+Mzdlt;MJ而引起溜钩故障。这种现象常发生在采用变频调速器、直流调速器、定子调压调速器实现软启动软制动的起升机构中,为了实现软启动功能而忽略了对准确停车时间的调整,会发生这类溜钩。
预防对策:调整电气控制系统控制程序,使电动机在速度降低到软制动设置速度,系统发出制动器闭合指令后,调速装置继续保持电动机具有一定的电磁转矩,直到制动器制动过程完全结束。这样设置,既可以实现起升机构的软停车功能,又能保证起升机构的准确停车。
(3) 电气控制系统和保护系统发生故障比如控制制动器的接触器粘连[9],导致制动器无法断电闭合,或者制动器受电磁干扰的影响而错误打开,或者调速器故障造成制动过程中电动机过早失磁,都会引起溜钩故障的发生。
预防对策:采用闭环控制、冗余设计和抗干扰技术提高电气系统控制的可靠性,减少系统的故障率。增加应急控制程序,即一旦发生意外溜钩,立即启动紧急停车功能。对于安全要求较高的场合应增加一套安全制动器。定期进行系统维护和保养,减少系统控制元件因环境因素影响出现故障。
3.3 提升操作过程的溜钩
把操作手柄从零位扳向提升工作档位,起升机构由停止状态转为提升运行状态。此时起吊货物所受的合成力矩为Mhc=Mq-(Mj+Mm),式中Mj为起吊货物的静力矩,Mm为传动机构的摩擦力矩,Mq为电动机的启动转矩。
电动机的启动转矩Mq必须满足Mq≥Mj+Mm才能逐渐加速启动。启动完毕稳定运行时,电动机的电磁转矩Mdc=Mj+Mm,电动机达到稳定工作状态,起升机构带动货物稳速提升。
如果起升机构启动过程中,电动机的启动转矩Mq≤Mj+Mm,货物不仅不能提升,反而会下滑,产生溜钩故障。或者稳定运行时Mdclt;Mj+Mm,起升机构就会减速运行,严重时会出现溜钩故障。
引起这类溜钩故障的主要原因如下:
(1) 在提升操作过程中,电源电压太低或电动机突然失电,造成Mq降低或消失,导致Mq≤Mj+Mm。
预防对策:定期检查和维护电气控制系统,保证供电电源的可靠性;保证起重机内部电压降不超过5%。
(2) 电气控制系统的控制程序错误,制动器打开太早,即制动器在电动机的电磁转矩还没有建立时就打开,造成Mq≤Mj+Mm,引起溜钩。
预防对策:调整电气控制系统控制程序,增加时序控制,检测电动机的启动转矩值,当满足Mq≥Mj+Mm后再给出指令打开制动器。
(3) 电气控制系统和保护系统发生故障,比如调速器故障或保护装置动作在制动器闭合前电动机提前失磁,导致溜钩故障的发生。
预防对策:采用闭环控制、冗余设计和抗干扰技术提高电气系统控制的可靠性,减少系统的故障率。增加应急控制程序,即一旦发生意外溜钩,立即启动紧急停车功能。对于安全要求较高的场合应增加一套安全制动器。定期进行系统维护和保养,减少系统控制元件因环境因素影响出现故障。
3.4 下降操作时的溜钩
在起升机构下降启动的瞬间,起吊货物所受的合成力矩Mhc=Mm-(Mj+Mq)。启动的初期,Mhc=Mm-(Mj+Mq)≥0,即货物的静力矩Mm≥Mj+Mq,电动机在货物的拖动下加速启动,随着速度的增加,电动机的电磁转矩越来越大,当合成力矩Mhc=Mm-(Mj+Mdc)=0时电动机达到稳定工作状态,起升机构带动货物稳速下降。
在下降启动过程中或者稳速下降运行中,如果因某种原因电动机电磁转矩减小或为零,货物将会失速下滑,导致溜钩故障发生。
导致下降时出现溜钩的原因和预防对策和3.3节相同。
3.5 违章操作引起的溜钩
常见的违章操作有以下两种情况:
(1) 超载使用、斜拉斜拽、操作过猛[10]、大风作业,致使Mqlt;Mj+Mm,导致溜钩故障发生。
(2) 在发生意外溜钩故障时,司机进行反向操作,导致电动机反复处在启动过程之中,电动机电磁转矩无法建立,导致溜钩故障加剧。
预防对策:为防止违章操作引起的溜钩故障,要完善超载保护器、大风报警器对操作回路的联锁控制,防止超载作业。出现意外溜钩故障时要禁止通过反向操作的方式[11]应对溜钩故障,应及时操作紧急停止按钮、切断电源,强制停车,防止故障扩大。对操作人员要定期进行安全操作培训,使之养成良好的操作习惯,防止误操作的发生。
4 结语
综上所述,引起起重机的溜钩故障的原因是多方面的,有机械部件的原因、电气控制的原因、供电电源的原因、作业环境的原因、违章操作的原因以及电磁干扰的原因。有时候常常是多种因素的组合作用造成的溜钩故障。因而在分析和处理溜钩故障时,切记头疼医头,脚疼医脚,进行简单的处理,而要以起升机构工作原理为基础进行综合分析,制定出一个系统的防溜钩措施,才能从根本上防止起重机溜钩故障的发生。建议起重机研发和制造单位,综合分析引起溜钩故障的各种原因,利用传感器技术和计算机控制技术,研发一套起重机防溜钩控制系统以消除起重溜钩隐患[12],实现对起重机的安全保护,保证起重机的使用安全,提高起重机的工作效率,增加企业的经济效益。
References)
[1] 刘安,桥式起重机起升机构动力学建模与分析[D].昆明:昆明理工大学,2015.
[2] 蔡涛,范建成.建筑塔机“滑钩”事故的预防与控制[J].中国科技信息,2012(16):69.
[3] 董有林.桥式起重机溜钩存在的危害及科学防范的措施[J].科技传播,2012(16):167-169.
[4] 张质文,虞和谦.起重机设计手册[M].北京:中国铁道出版社,2001.
[5] 起重机设计规范:GB/T3811—2008[S].北京:中国标准出版社,2008.
[6] 孙忠义.桥式起重机溜钩事故分析及防范措施[J].安徽冶金科技职业学院学报,2010,20(1):22-24.
[7] 王梅生,许长山.起重机溜钩问题简析[J].起重运输机械,2011(6):92-94.
[8] 起重机械安全规程:GB 6067.1—2010[S].北京:中国标准出版社,2010.
[9] 张军.解决起重机起升机构溜钩问题的若干对策[J].起重运输机械,2014(5):91-93.
[10] 韩翠英,刘占仓.起重机械事故原因分析及预防措施[J].低碳世界, 2016(33):258-259.
[11] 杨成余.起重机械事故原因分析及预防措施[J].电力安全技术, 2011,13(4):48-50.
[12] 胡忠华,孙钦友.基于PLC技术的起重机防溜钩系统的设计[J].上海铁道科技,2010(2):135,42.
Analysis and prevention countermeasures for gliding hook fault of construction tower crane
Wang Jidong1, Yan Yuping2, Li Jing1
(1. School of Civil Engineering, Zhengzhou Institute of Technology, Zhengzhou 450044, China; 2. Architectural Engineering Department, Zhengzhou Railway Vocational and Technical College, Zhengzhou 451460, China)
The gliding hook fault of the tower crane is systemically analyzed by using the classification analysis method and the theoretical analysis method, the various possible causes of the tower crane gliding hook fault are elaborated in detail and the countermeasures for the design and manufacturing of tower cranes and their users are also provided to avoid the occurrence of gliding hooks and ensure the safety of tower cranes.
tower crane; gliding hook; mechanical driven system; electrical control system
10.16791/j.cnki.sjg.2017.11.012
TH213.6
B
1002-4956(2017)11-0042-04
2017-05-08
郑州工程技术学院建筑电气与智能化创新团队项目(CXTD2017K4)
王继东(1965—),男,河南周口,教授级高级工程师,研究方向为建筑装备自动化技术.
E-mail1209732553@qq.com
