红外导引头伺服回转平台质心偏载测量方法研究
2017-11-27赵天承何锁纯
刘 凯 赵天承 汪 涛 何锁纯
(北京航天计量测试技术研究所,北京 100076)
红外导引头伺服回转平台质心偏载测量方法研究
刘 凯 赵天承 汪 涛 何锁纯
(北京航天计量测试技术研究所,北京 100076)
研究分析了某红外导引头伺服回转平台偏心力矩产生的物理模型,根据力学原理推导出一种简单实用的等效测量算法,大大简化了以往复杂测量计算过程,该方法克服了以往测量方法的不足,可以推广应用。
平台 质心偏载 等效 算法
1 引 言
红外导引头工作环境复杂,经常处于高强度瞬时冲击的状态,其伺服回转平台上两侧安装有具有探测作用的两个装置,二者质量不平衡力矩对伺服回转平台伺服性能的影响更为突出,质量不平衡力矩与环境加速度成正比关系,在高强度冲击下对伺服回转平台的旋转轴产生很大的过载力矩,进而影响伺服回转平台的伺服性能,导致伺服回转平台控制参数不匹配。
目前针对伺服回转平台的质心测试方法并不成熟,国内外常见的质心测量方法按原理可大致分为以下3类[1]:重力效应的原理、理论分析的原理以及力矩平衡的原理,详见表1。
由于伺服回转平台结构复杂、测量精度高,重力效应的方法由于测量精度不高,不适合使用;基于理论分析的方法因为目前的条件限制,也不适合使用;力矩平衡法最适合伺服回转平台质心位置测量。
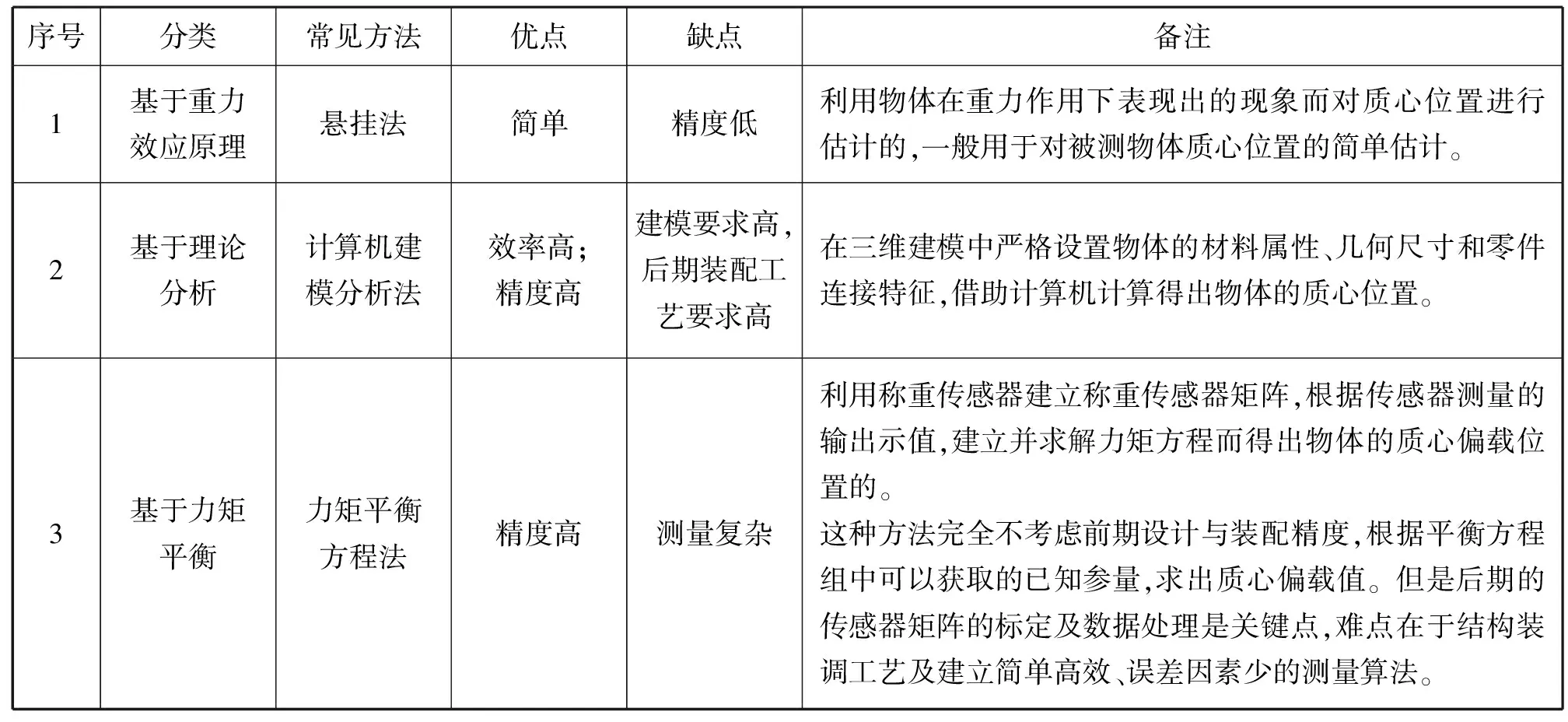
表1 常见质心偏载测量方法分类
对于同时兼有动载部分和静载部分的的质心偏载测量,力矩平衡法目前主要采用列力矩平衡方程的方法,引入参数多,计算复杂。因此质心测量方法研究具有十分重要的意义。
2力矩平衡等效法测量方法推导及分析
伺服回转平台质心偏载测量过程中,静载部分保持静止,动载部分绕着其回转轴转动。相应的如果动载部分的质心不在回转轴上,其质心会绕着回转轴作圆周运动。
如图1所示,建立测量原理坐标系,使X轴、Y轴平行于大地水平面,Z轴朝天,伺服回转平台测试时,回转轴与Z轴重合。设回转平台上不随回转轴转动的静载部分质心为OMxM,yM,随回转轴转动的动载部分质心为Omxm,ym。
在回转轴转动过程中,动载部分的质心会在坐标系中XOY面内绘制一个以Om为圆心的圆,设AxA,yA、BxB,yB、CxC,yC为圆上任意3点。
根据平行力系合成定理[2]可知,在动载部分质心AxA,yA(或BxB,yB;CxC,yC)和静载部分质心OMxM,yM之间必然存在一个点ExE,yE(或FxF,yF;GxG,yG),满足如下力矩平衡方程
(1)
式中:M——静载部分质量;m——动载部分质量;xM,yM——静载部分质心坐标;xA,yA——动载部分质心在A点时坐标;xE,yE——整体质心在E点时坐标。
或
(2)
式中:xB,yB——动载部分质心在B点时坐标;xF,yF——整体质心在F点时坐标。
或
(3)
式中:xC,yC——动载部分质心在C点时坐标;xG,yG——整体质心在G点时坐标。
将式(2)-式(1),则
(4)
整理得
(5)
同理可得
(6)
根据相似三角形判定原理,可得△ABC∽△EFG,设OM+mxM+m,yM+m为△EFG圆心 。由力矩力臂相似三角形可知
(7)
综上,测量伺服回转平台动载部分绕回转轴的偏载力矩,等效于在这个过程中静载和动载作为整体质心的偏载力矩。如图2所示建立测量坐标系[3],在测量坐标系内布置4个称重传感器。
转动伺服回转平台,分别对X轴、Y轴建立力矩平衡方程[4]
Fi1+Fi2+Fi3+Fi4=M+m
(8)
式中:Fi1,Fi2,Fi3,Fi4——分别为动载部分质心在Di(i=1,2,3,4)时称重传感器K1,K2,K3,K4的示值,kg。
(9)
式中:Xi,Yi——动载部分质心在Di(i=1,2,3)时整体质心坐标。
(10)
根据正弦与余弦的正负极性来判断质心偏载在回转坐标系(以回转轴为原点,坐标轴与测量坐标系平行)内的位置。具体见表2。
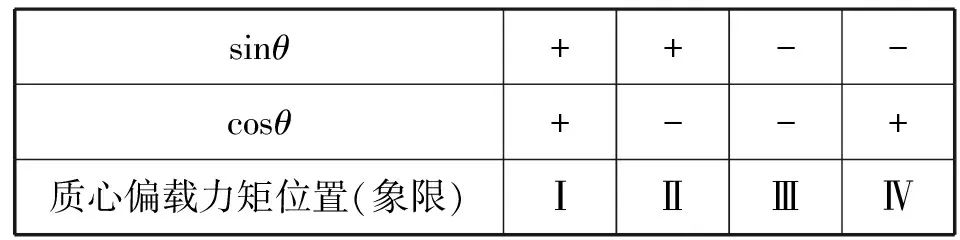
表2 质心偏载力矩在回转坐标系位置判定
当在回转过程中取更多点时,将会计算出更可靠准确的质心偏载力矩。
3 结束语
根据力学原理对伺服回转平台的质心进行受力分析及数学解析,分析总结出简洁实用的测量方法。提高了测量速度和可靠性。该方法可以广泛应用于类似本伺服回转平台的测量工作,对于质心偏载的测量及工业应用具有重要的作用。
[1] 王磊,林宇,张若岚. 轻小型红外成像稳定平台质心测量方法探究[J]. 测量技术,2013,35(7):434~438.
[2] 王铎,程靳. 理论力学 [M]. 北京:高等教育出版社,2006.
[3] 卢志辉,孙志扬,李祥云,薄悦,张磊乐.高精度质心测量方法研究[J].兵工学报,2009,30(12):1 748~1 752.
[4] 吴斌,王海峰,马贵贤.大质量飞行器质心测量方法[J].宇航计测技术,2007(6):28~30.
ResearchonMeasurementMethodofMassEccentricaboutServo-assistedRevolvingPlatformofInfraredSeeker
LIU Kai ZHAO Tian-cheng WANG Tao HE Suo-chun
(Beijing Aerospace Institute for Metrology and Measurement Technology,Beijing 100076,China)
The generation for mass eccentric about servo-assisted revolving platform of infrared seeker is researched, and a new concise equivalent measurement algorithm is excogitated by building mechanical model.this measurement greatly simplified the former complex measuring process,and can be applied widely.
Platform Mass eccentric Equivalent Algorithm
2016-08-30,
2017-03-24
刘凯(1987-),男,硕士,工程师,主要研究方向:飞行器瞄准定向技术。
1000-7202(2017) 04-0040-03
10.12060/j.issn.1000-7202.2017.04.09
TN216
A