30 cm氙离子推力器磁场特性分析与优化设计
2017-11-22,,,
,,,
兰州空间技术物理研究所 真空技术与物理国家级重点实验室,兰州 730000
30 cm氙离子推力器磁场特性分析与优化设计
胡竟,王亮,张天平*,江豪成
兰州空间技术物理研究所 真空技术与物理国家级重点实验室,兰州 730000
放电室磁场设计直接影响放电室的放电稳定性及推力器在轨工作寿命,针对多种工作模式下30 cm氙离子推力器磁场设计的复杂性问题,对推力器电磁体磁场向永磁体磁场转换中放电室的磁场特性进行了研究,并对永磁体磁场的关键参数进行优化设计。建立30 cm氙离子推力器放电室磁场转换的磁路模型,运用有限元分析理论,利用实际工程数据验证磁路模型计算结果的正确性与方法的可行性。在此基础上,分析获得给定磁路构型下产生要求磁感应强度的永磁体关键尺寸。以放电室工作阳极震荡电压、减速栅极电流、加速栅极电流和磁路系统质量为目标,采用多目标粒子群优化算法,对永磁体的关键参数进行优化,得到30 cm氙离子推力器设计性能目标下的磁路构型最优结果。本研究可为高效、稳定工作的离子推力器磁路设计及优化提供方法。
离子推力器;电磁体;永磁体;磁路模型;优化设计
离子推力器以比冲高、寿命长、工作模式精确可调等优点在航天器位置保持、姿态控制及轨道转移等领域中得到广泛应用[1-5]。直接包络等离子体的放电室是离子推力器的关键部件之一,有着支撑放电并保证稳定放电的功能。放电室磁场结构的合理与否直接影响到离子推力器整机的工作稳定性与可靠性,也是制约离子电推进系统长寿命可实现的关键。而离子推力器之所以能够实现多种模式下高效、可靠、稳定的工作,就是因为推力器放电室拓扑结构设计综合考虑了放电室磁场强弱变化或磁路构型变化等因素对离子推力器工作效率、放电损耗、阳极震荡电压及工作稳定性的影响。
针对离子推力器在轨工作过程中遇到的各种工作模式对放电室磁场进行“匹配性”设计是离子电推进系统设计的关键技术之一。事实上,对于恶劣的在轨工作环境及苛刻的工作要求,离子推力器放电室拓扑结构设计主要通过调整放电室关键点磁场强弱及放电室整体磁场构型,形成最优的放电室拓扑结构设计方案,兼顾离子推力器在不同工作模式下的放电室差异化磁场需求,以有效地控制推进剂的电离及等离子体的流动,满足放电室内离子生成与栅极组件离子引出之间的动态平衡,保持放电的稳定,实现离子推力器高效、稳定、可靠的工作。
在20 cm氙离子推力器成功实现在轨首飞验证[6]的基础上,针对更大推力、更高比冲、更长寿命的应用需求,通过继承20 cm氙离子推力器成熟技术,并结合美国XIPS-25[7-8]、NSTAR-30[9-10]及NEXT-40[11-13]等类型离子推力器结构特点,30 cm氙离子推力器采用沿放电室屏栅筒外表面平行布置柱状永磁体的磁场结构。同时,将永磁体两端的磁极靴延伸至放电室内部,使磁力线通过磁极靴均匀分布在放电室壁面周围,而在放电室内部及栅极组件区域分布较少,形成较大范围的“磁空区”,以有效约束电子的运动轨迹,并抑制放电室内部等离子震荡。
关于离子推力器的磁场设计技术,见诸报道的技术资料甚少,尤其是缺少详细的设计准则与方法相关资料。但从可见的报道中推测,为准确、快速建立放电室基本磁场构型及其分布,在离子推力器研制初期,其放电室磁场设计与分析多采用三维有限元方法。在此基础上,结合电磁体磁感应强度实时可调的突出优势,通过调节电磁铁工作参数从而确定离子推力器实现稳定工作所需最优磁场参数;此后采用各种方法将已确定的电磁体状态下的放电室磁感应强度转换为永磁体状态下的磁场磁感应强度,最终实现电磁体磁场向永磁体磁场的磁路匹配性转换。而对于需在多种工作模式下高效、稳定工作离子推力器,其放电室磁场设计更是如此。
有鉴于此,本文建立了30 cm氙离子推力器放电室磁场转换的磁路模型,运用有限元分析理论,利用实际工程数据验证磁路模型计算结果的正确性与方法的可行性。在此基础上,分析获得了给定磁路构型下产生要求磁感应强度及分布的永磁体关键尺寸,将离子推力器永磁体与电磁体两种状态下的性能进行对比,二者性能基本一致,实现了磁路转换的目的。并以放电室阳极震荡电压、减速栅电流、加速栅电流和磁路系统质量为目标,采用粒子群多目标优化算法,对永磁体的关键参数进行优化,得到30 cm氙离子推力器设计性能目标下的磁路构型最优结果。研究可为高效、稳定工作的离子推力器磁路设计及优化提供方法。
1 放电室磁场数值分析
30 cm氙离子推力器放电室磁场结构主要由磁体及磁极靴组成,针对其多模式高效、稳定工作需求,对磁体及磁极靴开展放电室结构的“匹配性”设计即可获得实现上述目标所需的磁场构型及磁感应强度分布。如图1所示为30 cm氙离子推力器放电室磁场结构示意。
图1 30 cm氙离子推力器放电室结构示意Fig.1 Diagram of 30 cm xenon thruster discharge chamber
如图1所示,区别于20 cm氙离子推力器放电室三级磁极靴结构[14],为进一步优化放电室原初电子路径,提高整机性能,借鉴美国NEXT-40离子推力器[15]放电室磁场结构,30 cm氙离子推力器在放电室锥段增加了一级磁极靴,形成了四级磁极靴结构。
1.1 磁路模型建立
30 cm氙离子推力器放电室磁场磁路模型如图2所示。由图2可知,30 cm氙离子推力器放电室磁场磁通除磁体、磁极靴及工作间隙构成的主磁路外,还有磁体、磁极靴对外围结构的漏磁通路。
图2中柱段磁体、中间磁体及锥段磁体的磁动势和磁阻分别用Fm1、Fm2、Fm3和Rm1、Rm2、Rm3表示,RFe1、RFe2、RFe3和RFe4分别为栅极磁极靴、中间磁极靴、锥段磁极靴和阴极磁极靴软磁材料的非线性磁阻;Rδ为放电室内磁极靴之间的工作间隙磁阻;Rσ为磁体及磁极靴对外围结构的漏磁阻。
图2 30 cm氙离子推力器磁场磁路模型Fig.2 Magnetic circuit model of 30 cm xenon ion thruster discharge chamber
Rδ通过解析法进行求解[16],进而得到栅极磁极靴与中间磁极靴、中间磁极靴与锥段磁极靴及锥段磁极靴与阴极磁极靴工作间隙总磁通。
基于图2所示30 cm氙离子推力器放电室磁场磁路模型,结合30 cm氙离子推力器电磁体放电室结构,采用有限元分析理论,构建了30 cm氙离子推力器电磁体结构有限元模型,如图3所示。在有限元模型构建过程中,忽略了由加工误差引起且对放电室磁场结构分析影响较小的磁体与磁极靴之间的配合间隙。该模型可用于研究30 cm氙离子推力器柱段电磁体、中间电磁体及锥段电磁体通以不同量值励磁电流时放电室磁感应强度变化及其分布规律。
图3 30 cm氙离子推力器电磁体结构有限元模型Fig.3 FEM model of electromagnet structure for 30 cm xenon ion thruster
1.2 模拟结果验证
为验证基于磁场磁路模型所构建的30 cm氙离子推力器电磁体结构有限元模型和分析方法的可行性和正确性,本文利用高精度多维磁场测试系统对30 cm氙离子推力器电磁体结构样机在柱段电磁体通以5.6 A,中间电磁体通以6.0 A,以及锥段电磁体通以6.0 A电流时的放电室磁感应强度及其分布特点进行了测试。
对标图1所示产品结构A~F六个点的实际位置,在有限元模型相应位置同样设置了A~F六个点分别监测其磁感应强度数值。通过模拟得到各电磁体通以相同工作电流时监测点磁感应强度平均值,将其与现场测试中相应位置的测试磁感应强度平均值比较,如表1所示。
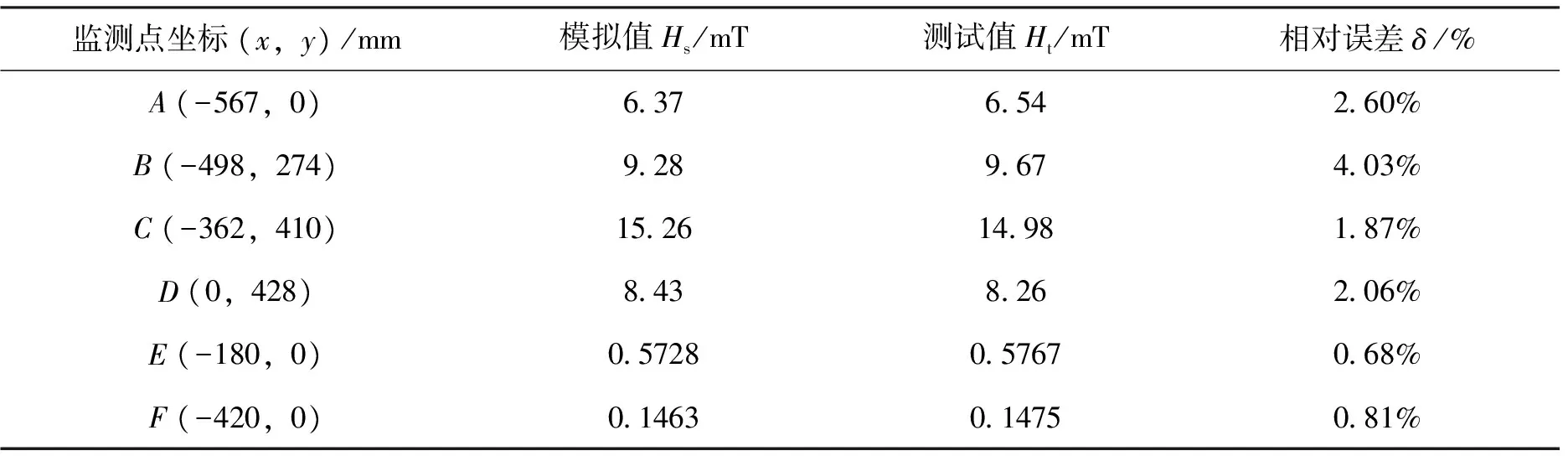
表1 数值模拟与现场测试结果对比Table 1 Comparison between simulation and experimental results
表1表明,监测点位置的磁感应强度模拟结果与实际测试值基本一致,二者误差控制在合理范围内,表明基于磁场磁路模型所构建的30 cm氙离子推力器电磁体结构有限元模型和分析方法的可行性,通过该理论方法开展30 cm氙离子推力器放电室磁场特性分析与优化设计是有效的。
2 放电室磁路转换与分析计算
2.1磁路转换过程
30 cm氙离子推力器磁路转换以获得给定磁路构型下可产生与电磁体放电室磁感应强度及其分布状态相同的永磁体关键尺寸为目标。针对30 cm氙离子推力器长寿命、高可靠应用要求及其工作过程中的高温环境特点,放电室磁路系统中永磁体的耐高温性能及磁性能的稳定性与可靠性是磁路转换中需重点考虑的因素。
高饱和磁感应强度的稀土钴永磁材料是20世纪60年代中期兴起的高性能永磁材料,具有高剩磁、高内禀矫顽力,低温度系数和高使用温度的特点。基于在轨特殊的使用需求,并结合2︰17型钐钴永磁材料优异的耐高温性能和磁稳定性[17-18],30 cm氙离子推力器选用2︰17型耐高温钐钴永磁材料作为放电室磁路系统的核心,以期为推力器提供所需的磁路构型、磁感应强度分布及其磁性能寿命需求。
以30 cm氙离子推力器电磁体结构样机在柱段电磁体通以5.6 A,中间电磁体通以6.0 A,以及锥段电磁体通以6.0 A电流时的放电室磁感应强度及其分布为转换目标,借鉴图3所示电磁体结构有限元模型,结合适当的参数设置,利用稀土钴永磁材料的高温磁性能参数指标,通过调整柱段永磁体、中间永磁体及锥段永磁体结构尺寸,即可获得给定磁路构型下产生要求磁感应强度及其分布的永磁体关键结构尺寸。
2.2 转换结果验证
表2所列为磁路转换后的柱段永磁体、中间永磁体及锥段永磁体结构尺寸。在磁极靴状态完全一致的情况下,永磁体状态的放电室磁感应强度及其分布与电磁体基本一致。
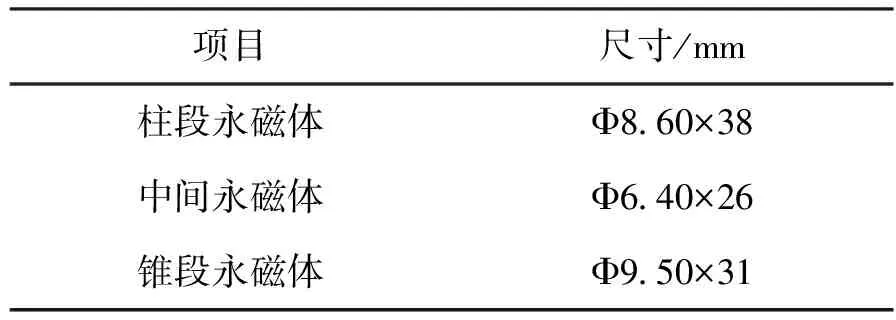
表2 永磁体结构尺寸Table 2 Dimension of permanent magnet
为验证30 cm氙离子推力器磁路转换后工作性能的变化情况,在除磁体外的相关试验条件、结构组成及状态、过程控制基本保持一致的情况下对采用表2所列永磁体结构尺寸的30 cm氙离子推力器永磁体结构样机进行了工作性能测试,并将其与电磁体结构样机的关键性能参数进行了对比,如表3所列。
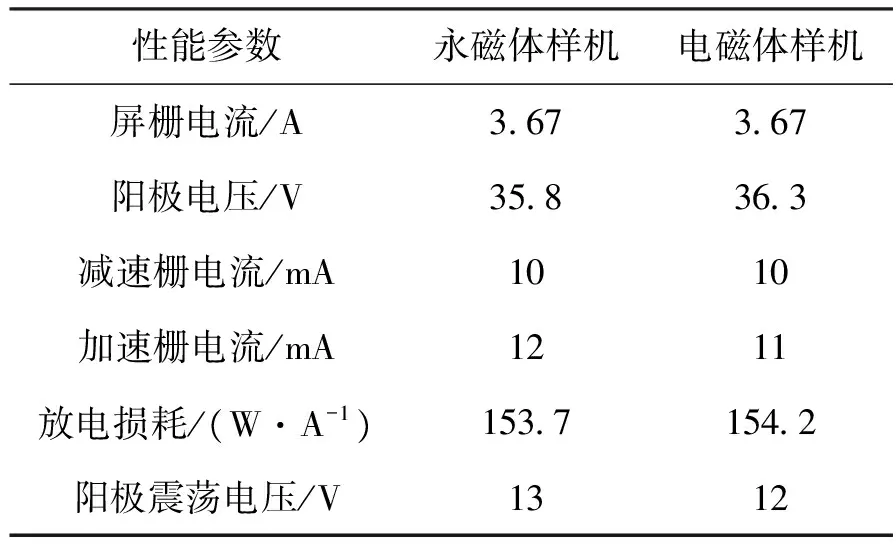
表3 磁路转换前后性能对比Table 3 Performance comparison of before and after magnetic conversion
如表3所列,在屏栅电流保持一致的情况下,磁路转换之后,永磁体样机的关键性能与电磁体样机基本保持一致,二者误差控制在合理范围内,基本实现了放电室电磁体结构向永磁体结构的磁路转换。也再次验证了30 cm氙离子推力器放电室磁场磁路模型及其分析方法的可行性和有效性。
3 磁路构型优化设计
30 cm氙离子推力器的应用对象为某新型公用卫星平台,平台要求推力器在轨服役寿命至少达到15年,且寿命末期的可靠性不得低于0.98。针对其长寿命、高可靠应用要求,并结合20 cm氙离子推力器寿命试验结果[19],分析可知,离子推力器放电室工作阳极震荡电压、减速栅极电流及加速栅极电流推力器性能和寿命的影响程度和方式不同。磁路构型优化的目的是针对磁路系统数学算法模型,寻求各敏感参数之间的最佳组合,使得30 cm氙离子推力器工作性能最优,并满足其寿命和可靠度要求。
围绕上述应用需求及优化目标,采用粒子群优化算法[19]对磁路构型进行多维优化。
3.1 多目标粒子群算法
粒子群算法(Particle Swarm Optimization,PSO)是一种基于群体协作的随机搜索方法,在航空、航天结构设计和控制中有广泛应用[20-24]。
在粒子群算法中,粒子群由m个粒子构成,每个粒子均包括D维位置矢量xi=(xi1,xi2,…,xid,…,xiD)和D维速度矢量vi=(vi1,vi2,…,vid,…,viD)。求解最优问题时,根据事先设定的优化目标,粒子群在D维空间内以速度vi飞行搜索可能的最优解,计算zi当前的适应值即可衡量粒子位置的优劣,最终决定当前解是否为最优解。
每个粒子根据适应值保存当前搜索到的最优解pi=(pi1,pi2,…,pid,…piD),以及整个粒子的整体最优解pgd=(pg1,pg2,…,pgd,…,pgD)。每次迭代分析中,粒子更新下一步的速度和位置:
式中:下标i=1,2,…,m为粒子编号;下标d=1,2,…,D;上标k为迭代次数;r1和r2为[0,1]间的随机数,用来保持群体多样性;c1和c2为加速因子,用以表征粒子向自身历史最优点及群体内历史最优点靠近的能力。
当优化求解问题存在多个子目标函数时,称为多目标粒子群优化。此时的全局最优解并非各子目标均为最优解,只是非劣解的集合,即Pareto解集。多目标优化算法的计算流程如图4所示。

图4 粒子群优化算法的计算流程Fig.4 Calculation flow chart of PSO
3.2 优化模型
综合考虑30cm氙离子推力器在平台中的工作效能和应用经济性,以推力器的工作功耗、推力、比冲、寿命及整机质量等关键性能指标均满足整星要求为前提,将优化目标确定为:1)阳极震荡电压最小;2)减速栅极电流最小;3)加速栅极电流最小;4)磁路系统质量最低。约束条件为:沿推力器x、y和z方向的一阶模态频率分别不小于240 Hz、240 Hz和250 Hz。选取磁路结构中磁体直径、锥段磁极靴和中间磁极靴内径、阴极磁极靴和栅极磁极靴高度及磁极靴厚度为设计变量,共选取了11个设计变量,其范围为:磁体直径Φ6.5~Φ11.2 mm,锥段磁极靴内径Φ198~Φ208 mm,中间磁极靴内径Φ290~Φ298 mm,阴极磁极靴高度6.3~8.5 mm,栅极磁极靴高度4.5~11.6 mm,磁极靴厚度2~4 mm。
综上所述,30 cm氙离子推力器磁路构型的优化模型可表述如下:
式中:d1、d2和d3分别为柱段磁体、中间磁体和锥段磁体的直径;dc为锥段磁极靴内径;dm为中间磁极靴内径;h为阴极磁极靴高度;l为栅极磁极靴高度;t1、t2、t3和t4分别为栅极磁极靴、中间磁极靴、锥段磁极靴和阴极磁极靴厚度;Vmin为阳极震荡电压最小值;Idmin为减速栅极电流最小值;Iamin为减速栅极电流最小值;mmin为磁路系统质量最小值;fx、fy和fz分别为模态频率。
3.3 分析结果与结果验证
在MATLAB软件中利用多目标粒子群优化算法分析30 cm氙离子推力器磁路构型阵列参数。主要程序的结构如图5所示。
经过多次迭代,粒子群最终收敛于系统最佳工作状态。为验证基于多目标粒子群优化算法获得的30 cm氙离子推力器磁路构型优劣,在除磁体外的推力器状态、试验条件与过程控制均保持一致的情况下,依据粒子群迭代优化结果,对磁路构型优化前后30 cm氙离子推力器性能进行了大量试验测试。
基于优化前提与目标,并结合试验测试结果,从符合工程化应用的角度确定了永磁体结构尺寸,如表4所列。

表4 永磁体结构优化尺寸Table 4 Optimized dimension of permanent magnet

图5 磁路构型多目标优化程序流程Fig.5 PSO program flow chart of magnetic configuration
如图6所示为磁路构型优化后30 cm氙离子推力器引束流工作状态。如表5所列为30 cm氙离子推力器磁路构型优化前后性能对比。
如表5所列,在屏栅电流保持一致的情况下,除减速栅电流外,磁路构型优化后的推力器性能均优于优化前的性能状态,基本实现了磁路构型优化的目标。同时,也验证了基于多目标粒子群优化算法进行30 cm氙离子推力器磁路特性优化设计的可行性和合理性。

图6 磁路构型优化后推力器引束流状态Fig.6 Working condition of 30 cm xenon ion thruster
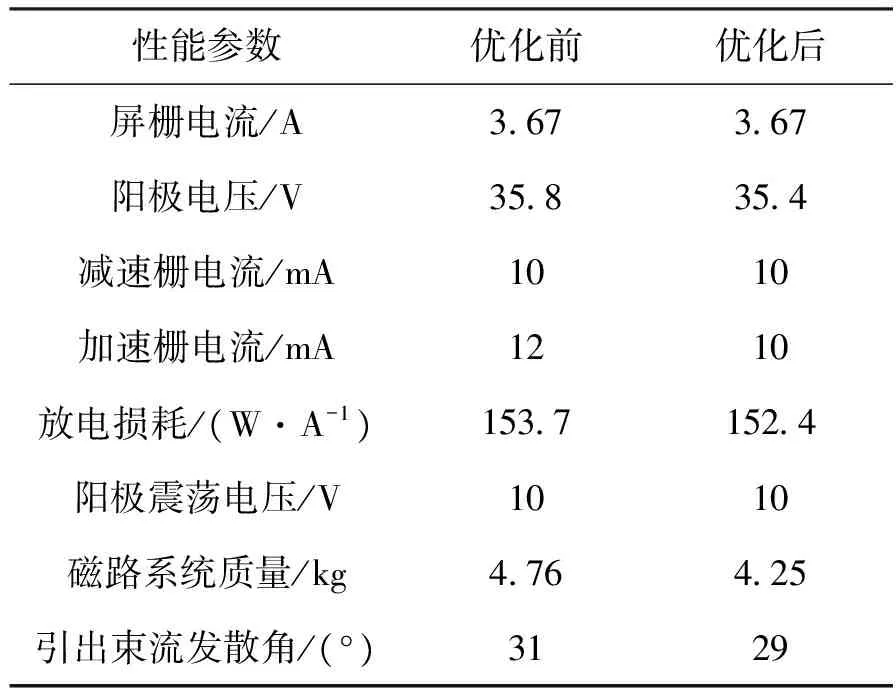
表5 30 cm氙离子推力器磁路优化前后性能对比Table 5 Performance comparison of before and after optimization
4 结束语
针对多种工作模式下30 cm氙离子推力器磁场设计的复杂性问题,本文研究了30 cm氙离子推力器电磁体磁场向永磁体磁场转换的放电室磁场特性,并对永磁体磁场的关键参数进行优化设计,可以得到以下结论:
1)构建了30 cm氙离子推力器放电室磁场磁路模型,利用实际工程数据验证了磁路模型计算结果的正确性与方法的可行性,为离子推力器放电室磁场拓扑结构设计提供分析支持;
2)在工作模式相同的情况下,磁路转换后的30 cm氙离子推力器永磁体样机性能与电磁体样机基本一致,二者误差控制在合理范围内,实现了磁路转换的目标和效果;
3)采用多目标粒子群优化算法开展了30 cm氙离子推力器放电室磁路构型优化设计,放电室工作阳极震荡电压、减速栅极电流、加速栅极电流和磁路系统质量得以改善,为包括栅极组件、空心阴极在内的离子推力器关键部组件及整机设计及优化提高技术支撑。
本项目的下一阶段将对30 cm氙离子推力器磁路系统与栅极组件、空心阴极等部组件间的性能匹配性开展分析研究,实现磁场、栅极及阴极间的最优组合。
References)
[1] 胡帼杰,李健,刘百麟.地球静止轨道LIPS-300 离子电推力器热设计与优化[J].中国空间科学技术,2016,36(1):85-93.
HU G J,LI J,LIU B L.Thermal design and optimization of LIPS-300 ion thruster in geosynchronous orbit[J].Chinese Space Science and Technology,2016,36(1):85-93(in Chinese).
[2] 张天平,田华兵,孙运奎.离子推进系统用于GEO卫星南北位保使命的能力与效益[J].真空与低温,2010,16(2):72-77.
ZHANG T P,TIAN H B,SUN Y K.Capability and benefit of the LIPS -200 system for NSSK mission of GEO satellite[J].Vacuum & Cryogenics,2010,16(2):72-77(in Chinese).
[3] 胡竟,江豪成,王亮,等.阴极挡板对30cm氙离子推力器性能影响的研究[J].真空与低温,2015,21(2):103-106.
HU J,JIANG H C,WANG L,et al.Experimental research of performances 30cm xenon ion thruster subjected cathode baffle[J].Vacuum & Cryogenics,2015,21(2):103-106(in Chinese).
[4] 陈娟娟,张天平,贾艳辉,等.LIPS-300离子推力器加速栅电压的优化设计[J].中国空间科学技术,2015,35(2):70-76.
CHEN J J,ZHANG T P,JIA Y H,et al.Optimization of LIPS-300 ion thruster accelerator voltage[J].Chinese Space Science and Technology,2015,35(2):70-76(in Chinese).
[5] 王雨玮,任军学,吉林桔,等.放电电压和屏栅电压对离子推力器性能的影响[J].中国空间科学技术,2016,36(1):77-84.
WANG Y W,REN J X,JI L J,et al.Effects of discharge voltage and screen grid voltage on performance of ion thruster[J].Chinese Space Science and Technology,201 6,36(1):77-84 (in Chinese).
[6] ZHANG T P,WANG X Y,JIANG H C.Initial flight test results of the LIPS-200 electric propulsion system on SJ-9A satellite[C]//Proceedings of the 33rd International Electric Propulsion Conference,Washington DC,USA,2013.
[7] JOSE G D A.European space agency (ESA) electric propulsion activities[C]//Proceedings of the 34th International Electric Propulsion Conference,Kobe,Japan,2015.
[8] WILLIAM G T,KUEI R C,EZEQUIEL S,et al.Performance evaluation of the XIPS 25-cm thruster for application to NASA discovery missions:AIAA-2006-4666[R].Reston: AIAA,2006.
[9] POLK J E,KAKUDA R Y,ANDERSON J R,et al.Performance of the NSTAR ion propulsion system on the deep space one mission:AIAA-2001-0965[R].Reston: AIAA,2001.
[10] DANIEL A H,ALEC D G.Discharge chamber plasma structure of a 30-cm NSTAR-type ion engine:AIAA-2004-3794[R].Reston: AIAA,2004.
[11] SCOTT W B,MICHAEL J P.Development status of NEXT: NASA′S evolutionary xenon thruster[C]//Proceedings of the 28th International Electric Propulsion Conference,Toulouse,France,2003.
[12] MICHAEL J P,SCOTT W B B.NEXT ion propulsion system development status and performance: AIAA-2007-5199[R].Reston: AIAA,2007.
[13] DAN M G,RICHARD E W,IRA K.Analytical ion thruster discharge performance model:AIAA-2006-4486[R].Reston: AIAA,2006.
[14] ZHANG T P,YANG L,TIAN L C,et al.The electric propulsion progress in LIP-2015[C]//Proceedings of the 34th International Electric Propulsion Conference,Kobe,Japan,2015.
[15] DANIEL A H,ALEC D G.Discharge chamber plasma potential mapping of a 40-cm NEXT-type ion engine:AIAA-2005-4251[R].Reston: AIAA,2005.
[16] 孙雨施.直流磁系统的计算与分析(模型·算法·程序)[M].北京:国防工业出版社,1987:170-269.
SUN Y S.The calculation and analysis of DC magnetic system(model·arithmetic·program)[M].Beijing: National Defence Industry Press,1987:170-269.
[17] 曾祥铭.表面式永磁推进电机的研究[D].武汉:华中科技大学,2007.
ZENG X M.Research on surface permanent magnet propulsion electrical machines[D].Wuhan: Huazhong University of Science and Technology,2007(in Chinese).
[18] CHRISTINA C,MICHAEL H W,SAM L.Thermal stability and the effectiveness of coatings for Sm-Co 2∶17 high-temperature magnets at temperatures up to 550℃[J].IEEE Transactions on Magnetics,2004,40(4):2928-2930.
[19] ZHANG T P,MENG W,GENG H,et al.7500-hour life test of the QM LIPS-200 ion thruster[C]//Proceedings of the 34th International Electric Propulsion Conference,Kobe,Japan,2015.
[20] 李莉,牛奔.粒子群优化算法[M].北京:冶金工业出版社,2009:25-33.
LI L,NIU B.Particle swarm optimization[M].Beijing: Metallurgical Industry Press,2009:25-33.
[21] 夏昊,陈昌亚,王德禹.基于多目标粒子群算法的卫星结构动力学优化[J].上海交通大学学报,2015,49(9):1400-1403,1410.
XIA H,CHEN C Y,WANG D Y.Dynamical optimization of satellite structure based on multi-objective particle swarm optimization algorithm[J].Journal of Shanghai Jiao Tong University,2015,49(9):1400-1403,1410(in Chinese).
[22] 王婷,夏广庆,兰聪超.粒子群算法求解不等质量库仑卫星编队最优构型[J].系统工程与电子技术,2016,38(2):305-313.
WANG T,XIA G Q,LAN C C.Optimal static configuration of non-equal mass Coulomb formation satellites by PSO[J].Systems Engineering and Electronics,2016,38(2):305-313(in Chinese).
[23] 刘济民,侯志强,宋贵宝,等.乘波外形导弹弹道特性分析与优化设计[J].弹道学报,2010,22(4):19-22,35.
LIU J M,HOU Z Q,SONG G B,et al.Trajectory characteristics analysis and optimization design of hypersonic waverider-based missile[J].Journal of Ballistics,2010,22(4):19-22,35(in Chinese).
[24] 王允良,李为吉.基于混合多目标粒子群算法的飞行器气动布局设计[J].航空学报,2008,29(5):1202-1206.
WANG Y L,LI W J.Aerodynamic configuration design of aircraft with hybrid multi-objective particle swarm optimization[J].Acta Aeronautica Et Astronautica Sinica,2008,29(5):1202-1206(in Chinese)
(编辑:车晓玲)
Magneticfieldcharacteristicsanalysisandoptimizationdesignof30cmxenonionthruster
HU Jing,WANG Liang,ZHANG Tianping*,JIANG Haocheng
NationalKeyLaboratoryofScienceandTechnologyonVacuumTechnologyandPhysicsLaboratory,LanzhouInstituteofSpaceTechnologyandPhysics,Lanzhou730000,China
The magnetic field design directly influences the stability and the in-orbit life of the discharge chamber.Aiming at the complexity of the 30 cm xenon ion thruster magnetic field design in variety of operating modes,the magnetic circuit characteristics was analyzed during the conversion between the electromagnet and permanent magnet.And the key parameters of the permanent magnet were optimized.The magnetic circuit model of the 30 cm xenon ion thruster was established,combined with the finite element method,the effectiveness and feasiblity of this method was validated by compared with the job site data.Based on this model,the key parameters of the permanent magnet which could produce requested magnetic induction intensity were obtained.Then the key parameters of the permanent magnet were optimized by using multiobjective particle swarm optimization (MPSO) algorithm,with the goal of the minimum anode shock voltage,accelerator grid current,decelerator grid current and magnetic circuit system weight system,and the relevant optimal result of magnetic circuit configuration for 30 cm xenon ion thruster was observed.Above research will certainly provide a method for the design and optimization of the ion thruster.
ion thruster;electromagnet;permanent magnet;magnetic circuit model;optimization design
http://zgkj.cast.cn
10.16708/j.cnki.1000-758X.2017.0068
V439+.4
A
2017-03-20;
2017-07-17;录用日期2017-09-12;< class="emphasis_bold">网络出版时间
时间:2017-09-24 16:01:08
http://kns.cnki.net/kcms/detail/11.1859.V.20170924.1601.010.html
装备预先研究项目基金(414230605XX);国家自然科学基金(61601210)
胡竟(1988-),男,工程师,hjing37615486@163.com,研究方向为放电等离子电推力器技术与应用
*通讯作者:张天平(1963-),男,研究员,ztp510@aliyun.com,研究方向为放电等离子电推力器技术与应用
胡竟,王亮,张天平,等.30cm氙离子推力器磁场特性分析与优化设计[J].中国空间科学技术,2017,37(5):60-67.HUJ,WANGL,ZHANGTP,etal.Magneticfieldcharacteristicsanalysisandoptimizationdesignof30cmxenonionthruster[J].ChineseSpaceScienceandTechnology,2017,37(5):60-67(inChinese).