振管式结冰检测传感器设计优化及改进
2017-11-21
中国电子科技集团公司第四十九研究所,黑龙江哈尔滨 150001
一、引言
无论在气象和道路结冰检测等民用领域,还是在机翼及雷达表面结冰厚度检测等军用领域,结冰检测技术都有着广泛的需求和应用。
目前,现有的振管式结冰检测传感器产品稳定性不高,冰层厚度测量精度低,甚至有些产品不具备冰层厚度测量能力,严重影响其实际使用效果。因此,提高传感器的稳定性并开发其冰层厚度测量能力,就变得非常有必要。
本文通过对传感器进行设计优化,使用扫频电路代替LC谐振电路,以提供稳定的激振信号;通过多项式目标函数法,将被测频率、环境温度以及冰层厚度结合起来,实现对冰层厚度的准确检测。最终,使传感器稳定性大大提高,并实现对冰层厚度测量,误差精度不小于0.15mm。
二、工作原理
振管式结冰检测传感器的探头组件部分如图1所示,其原理为:利用谐振电路产生交变信号,在激振线圈中产生交变磁场,使磁致伸缩合金制成的振管在磁场作用下产生磁致伸缩振动,最终使振管以谐振频率振动,再通过信号拾取线圈将振管的振动频率转换为频率电信号,实现信号处理电路对振动频率的检测。根据振动学理论,当包括振管在内的传感器探头表面结有冰层时,振管的固有谐振频率会随着冰层的加厚而降低,因此通过检测谐振频率的偏移量Δf,就可以得出当前冰层的厚度[1]。
三、传感器设计优化
1、传感器电路部分优化设计

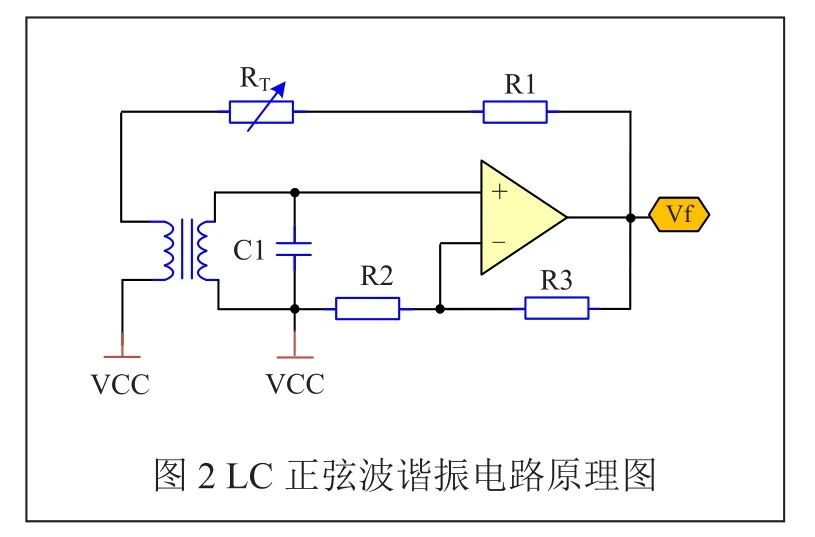
目前,结冰检测传感器采用LC正弦波谐振电路来对振管进行激振,其原理图如图2所示。这种电路设计结构简单,需要的电子元件少,但也存在以下两个缺点:
(1)受加工装配过程中必然存在的误差影响,批量生产的传感器振管谐振频率不可能保证一致性,为了使激振效果达到最大,就必须调整每个激振电路中的容值和阻值,使得人力和时间成本变高;
(2)由于结冰检测传感器的使用环境普遍较为恶劣,容易受到冲击和振动的影响,长期使用过程中,整体焊接封装结构会发生细微的改变,导致振管谐振频率出现偏移现象,使得LC激振电路的激振能力减弱甚至失效[2]。
为解决以上两点问题,本文将激振电路改为由单片机控制DDS芯片AD9850组成的扫频电路。该电路可以自动调整激振频率,同时完成拾取频率检测和后续的数据处理及逻辑控制工作。
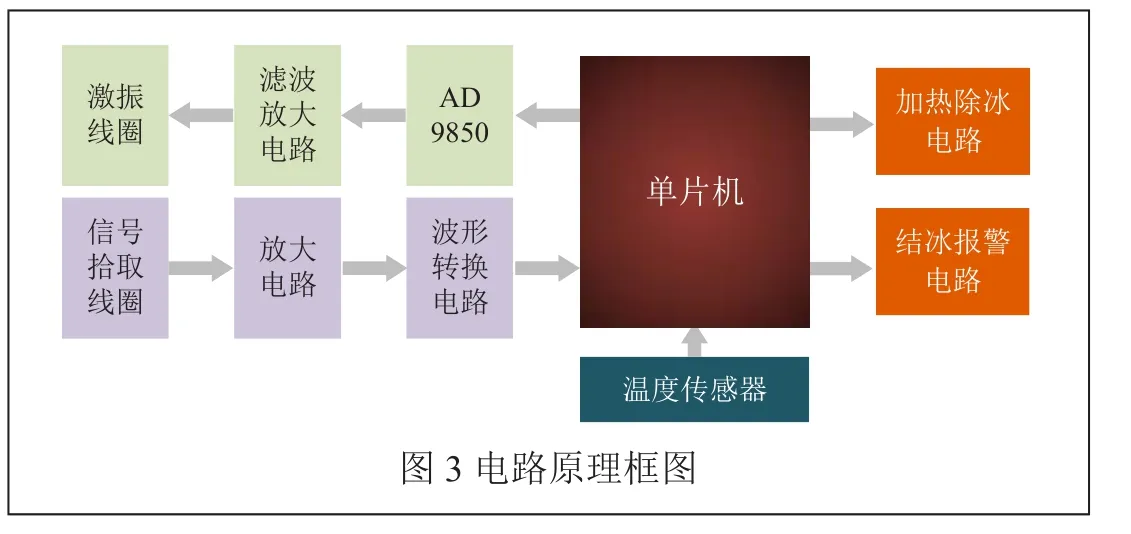
AD9850是高集成度DDS频率合成器,其内部包括可编程DDS系统、高性能DAC及高速比较器,能实现全数字变编程控制的频率合成器和时钟发生器。在接入精密时钟源后,AD9850可产生一个频谱纯净、频率和相位都可编程控制的模拟正弦波输出。AD9850在125MHz时钟下,输出频率分辨率为0.029Hz,频率范围为0.1Hz~400MHz,幅值范围为0.2~1V。对应的电路组件原理框图如图3所示[3]。
当传感器启动时,单片机通过串口直接向AD9850输入频率、相位等控制数据,AD9850则输出一定频率范围内扫频变化的正弦波激振信号,经滤波放大后输送至激振线圈。激振线圈受激后产生交变磁场,当激振信号频率与振管谐振频率重合时,则振管振幅达到峰值,信号拾取线圈将机械振动转化为电信号,经放大和波形转换电路后,变为同频率方波反馈回单片机,最终由单片机测得反馈信号频率,进行后续的逻辑运算处理。
其中,在经过初始化后,AD9850输出的正弦波信号频率为扫频频率的下限(f0-fT),其中,f0为使用ANSYS软件进行有限元分析得到的振管理论谐振频率,fT为调整频率,其具体数值与有限元分析过程中模型的简化成都有关。若对模型过度简化,忽略的组件过多,则理论谐振频率与实际谐振频率的误差将增大,此时fT应适当增大,根据具体情况进行设定。Δf的大小由AD9850的频率控制字ΔFreq决定,最小可达到0.03Hz,当然在实际使用过程中并不需要如此小的扫频变化量,设定为10~20Hz即可满足要求。
2、结冰厚度检测
当结冰检测传感器的振管表面结冰时,其轴向固有谐振频率将出现偏移,冰层厚度越大,谐振频率越低。不过,环境温度的变化会引起谐振频率产生漂移,再加上其本身所存在的非线性问题,以及在焊接组装过程中受到的应力影响,冰层厚度和频率变化量并不是线性关系。
结冰检测传感器在冰层厚度相同的情况下,其谐振频率在不同的环境温度下会有不同的输出值。采用信息融合的处理方法,推导出传感器输出信号的最佳拟合表达式,得出融合了温度测量结果的带有温度参数的频率输出解析表达式,进而通过准确的温度测量实现高精度的结冰厚度检测[4]。
结冰检测传感器的谐振频率输出信号Ft可以由两部分组成:

其中,F0(t,f)—零点输出信号,与温度和传感器探头组件自身的谐振频率f有关;
h—与冰层厚度有关的有效信号。
又有下式:
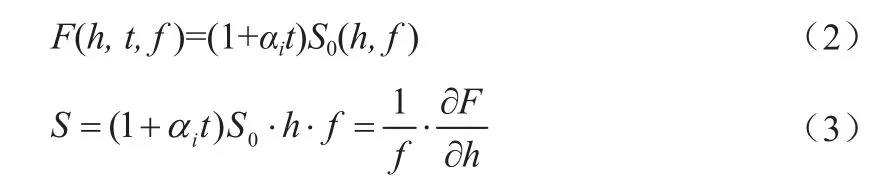
其中,S—冰层厚度灵敏度,与传感器的结构、焊接工艺、振管结构尺寸等因素有关;
S0—温度为零度时的冰层厚度灵敏度;
αi—冰层厚度灵敏度温度系数。
因为S0为非线性函数,于是将h表示为f的幂级数,即有:

在满足精度条件下取有限项n,结冰检测传感器校准时由静态特性可以测得m组h和f的数据。对应第i个测量值hi,fi,对应式(4)的hi′计算值为:

使计算值hi′与各次测量值hi的偏差平方和最小,即有:

因为i有n个有限值,因此由式(6)可得n个线性方程。式(6)对αi求导后,得:

当解出n个有限的αi值:α0、α1…αj…αn后,带入式(4)可得hi(fi)的计算值。由i=1,2……n个hi′的计算值,再带入式(6)可得到σ值。若σ值小于规定的误差值,则上面确定的n个αi值已经达到目标要求,于是可用式(7)表示h-f之间的显示关系。若σ〉σ0,则说明未达到目标要求,此时重新令hi(fi)多项式中再增加n+1 项,重新计算α0、α1…αj…αn+1各系数,直到达到目标要求为止。
四、实验验证
1、稳定性试验
为验证传感器的稳定性设计,分别对使用LC谐振电路的传感器A和使用扫频电路传感器B进行冲击振动试验。其中,冲击试验按照GJB150.18中试验五规定的条件进行,振动试验按照GJB150.16中2.3.1规定的试验方法进行。若为了进一步模拟实际的使用环境,还可进行随机振动、温冲、湿热等环境试验,考虑到工作量太大,本文未进行这几种试验。
试验结果如图4所示,可以看出两个传感器振管的谐振频率都发生了漂移。其中,使用LC谐振电路的传感器拾取到的频率信号产生了失真变形,幅值明显减小,而使用扫频电路的传感器拾取到的频率信号波形和幅值变化极小。
2、冰层厚度检测试验
将传感器放置在-30℃的低温箱中,待其温度稳定后,用装有低于5℃水的喷雾器向传感器顶帽部位均匀地喷一薄层水,喷水量限制在10ml以内。20min后,使用卡尺测量带有冰层的振管直径H,则冰层厚度为:(H-H0)/2,H0为振管自身直径。之后,重复上述过程,直至冰层厚度为3mm为止,得出的冰层厚度与实际冰层厚度对比如表1所示。
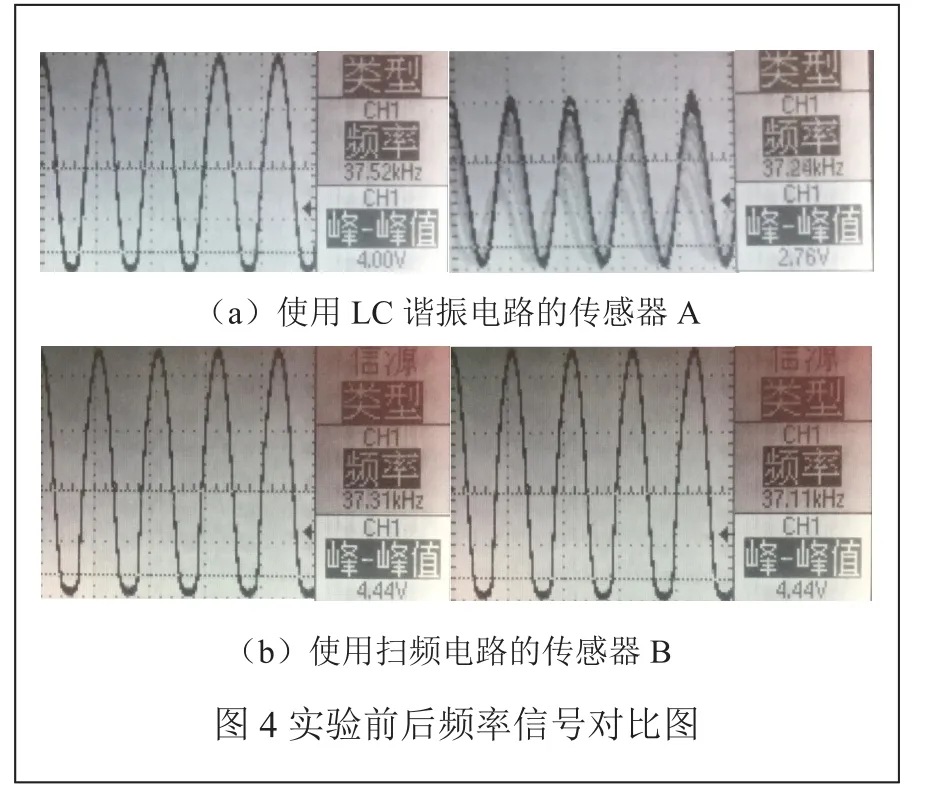
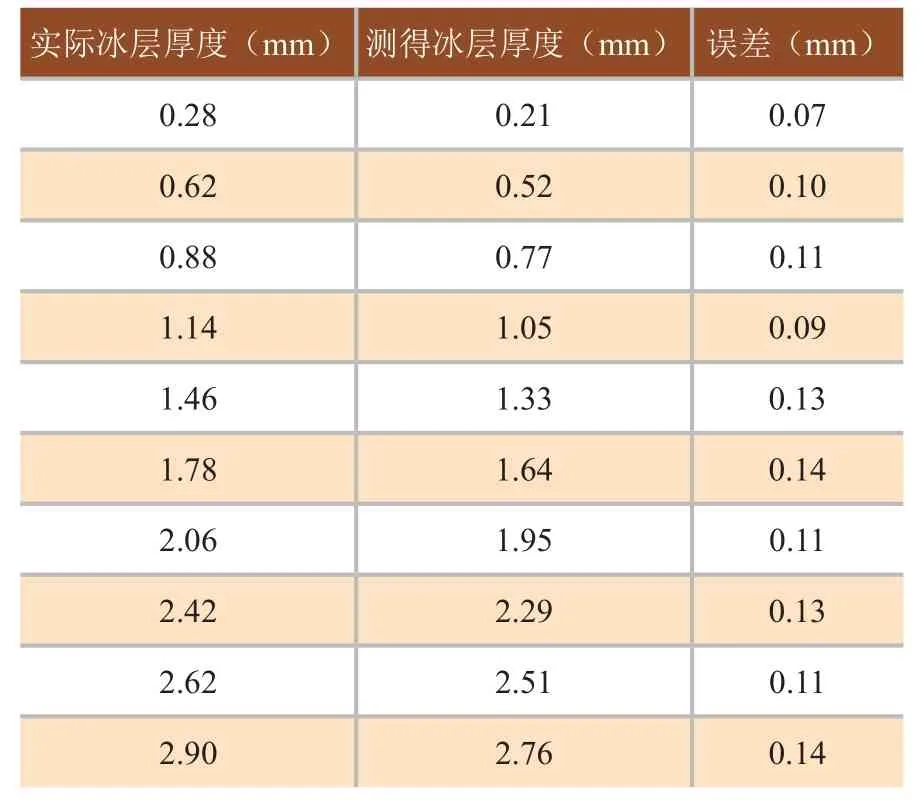
表1 实际冰层厚度与测得冰层厚度对比表
试验验证表明,通过使用扫频电路进行激振,可以有效提升振管式结冰检测传感器的稳定性;采用信息融合技术进行冰层厚度检测。如表1所示,传感器对0~3mm厚的冰层,测量误差不大于0.15mm。
五、结论
振管式结冰检测传感器目前已经在我国某型导航系统的相控雷达上的到应用,但受限于传感器的稳定性较差,缺乏冰层厚度测量能力等缺点,尚未得到大范围推广应用。本文对传感器进行了针对性的改进,实现了对冰层厚度的准确检测,传感器对冰层厚度测量误差小于0.15mm。在此试验基础上,经过工程化和产品化推广,结冰检测传感器将拥有更加广阔的应用前景。