一种夹紧力传感器的研制
2017-11-21
中国空气动力研究与发展中心 设备设计及测试技术研究所,四川绵阳621000
一、引言
夹具在机械加工和设备测量中有着广泛的应用,夹具夹装零件引起的工件加工误差是精密零件加工和测量中不可忽略的影响因素。
夹装零件导致的误差主要有以下几个方面[1-3]:
①夹紧力不足,零件在加工和测量过程中发生偏移和振动;
②在夹紧过程中,由于夹装顺序不当或夹紧力施加不均匀,零件的理想定位加工后的状态存在偏差;
③零件在夹紧力的作用下发生弹性形变,在加工完成撤消夹紧力后,零件由于力的释放产生回弹变形,出现零件在力的作用下测量准确、撤消力后超差的现象。
为了减小零件夹具系统的变形,对工件所施加的夹紧力应尽量减小,但同时又必须保持加工和测量过程中零件夹具的稳定性。理想的夹紧力,在整个加工过程中应使所有的定位元件对零件施加正压力,并且零件不会产生大的变形或损坏[4]。因此,有必要研制一种夹紧力传感器,对夹具的夹紧力进行有效测量,以评估夹具的性能。
夹紧力传感器是基于应变原理的测力传感器,目前工业领域所用的称重传感器基本都是基于应变原理[5-6],其弹性体结构大多采用简单的悬臂梁或者超静定梁结构,传感器工作时,粘贴在弹性元件表面的应变计随弹性体变形而变形,经惠斯通全桥测量电路转换成电压增量,电压信号进行处理换算后就可以得到相应的称重力;应变式传感器的高精度和良好的稳定性能,使其在多分量力学测量领域也得到应用,如机器人用多维力传感器[7-8]、风洞应变天平[9]等,这类传感器的弹性体上加工有不同的结构形式的测量元件,使这些测量元件在载荷的作用下,对各自预测量分量的载荷敏感,产生相对明显的变形,而对其它分量载荷不敏感,不产生或产生尽量小的变形,实现结构上对力与力矩的机械分解或部分机械分解,再通过应变计的粘贴位置与全桥测量电路的设置,使其它分量载荷所产生的应变不改变电桥的平衡状态,实现力与力矩的电气分解。夹紧力传感器针对性较强,参照称重传感器和风洞天平设计方法,进行专门设。
二、技术要求


夹紧力传感器的研制主要用于某型机械夹具的夹紧力测量,机械夹具呈钳状,工作时由传递梁带动接触头向中间做钳制运动,接触头为直径3mm圆柱,被钳制设备钳制位置厚2mm,两个接触头放开状态间距为2.2mm,如图1所示。
夹紧力传感器具体技术参数要求如下:
(1)测量精度:0.5%F.S.
(2)测量量程:100N
(3)测量间距:2mm
(4)100N力作用下位移小于0.1mm
(5)过载保护
三、传感器结构设计
1、传感器结构方案
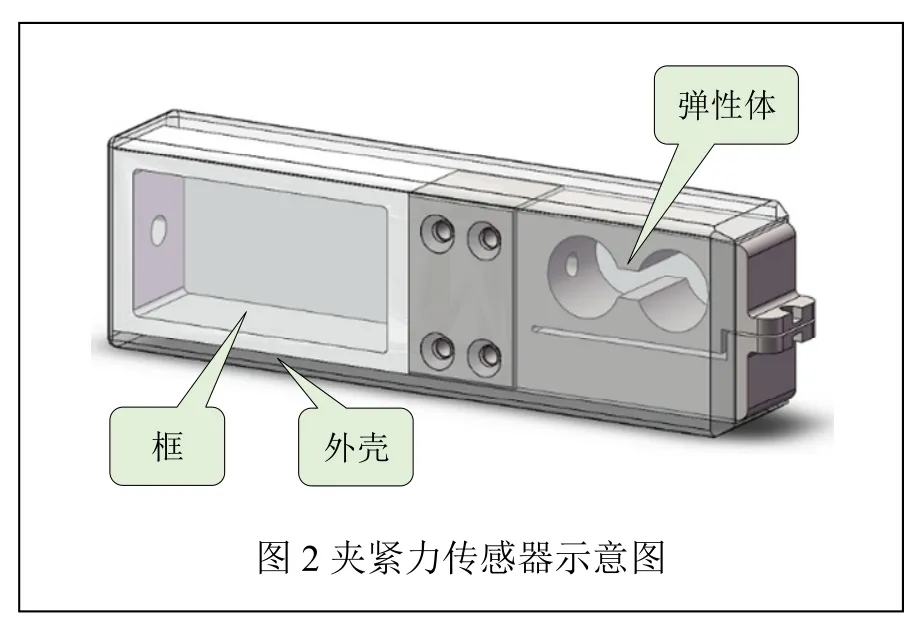
夹紧力传感器为应变式传感器,传感器示意图如图2所示,主要由外壳、框和弹性体组成。传感器为手持式,为方便操作,传感器外形尺寸为120mm×36mm×22mm。弹性体和框安装在外壳里面,外壳为长方体,中空结构,锐边倒圆;弹性体根部外表面与壳体内表面为配合面,通过螺钉连接;框通过螺钉安装在弹性体根部,为电子线路留出安装空间,材料选用硬铝,减轻重量的同时降低成本。
2、弹性体材料
夹紧力传感器为应变式传感器,应变式传感器弹性体材料必须具备较高的强度、优良的弹性性能、稳定的弹性模量随温度变化趋势、较低的线膨胀系数、较高的疲劳强度和冲击韧性以及优良的热处理工艺性能与机械加工性能[9],以保障应变式传感器的稳定性和测量精确度。
针对传感器弹性体要求,选择马氏体时效钢(00Ni18Co8Mo5TiAl)作为弹性体材料,其物理参数为:

由此可见,马氏体时效钢可以作为夹紧力传感器弹性体的材料。
3、弹性体设计
弹性体[10]结构外形为长方体,采用钳形结构,主要包括后座、应变梁、支撑梁和测量接口,如图3所示。后座为弹性体的支撑结构,后表面与框连接,侧表面与壳体内表面连接。后座向前延伸两个量分别为应变梁和支撑梁,呈钳形结构,由于一个梁就可以完成测量任务,为减少加工工序和节省材料,应变梁和支撑梁采用的是非对称结构,分别用于测量和支撑。应变梁选用的是双联孔的结构形式,双联孔内最薄为贴片位置,这种结构形式的优点是保证受力产生一定应变的同时,具有较大的刚度,即变形量小,根据传感器所需要的应变值和刚度,推算应变梁的结构尺寸;支撑梁为简单的长方体悬臂梁结构,主要起辅助支撑的作用,根据应变梁的刚度,推算出支撑梁的结构尺寸,使应变梁和支撑梁在受力状态下变形一致。应变梁和支撑梁末端有唇形凸起,L型设计使应变梁和支撑梁在不对称的情况下保证凸起位于传感器前端中部,以适应操作人员的操作习惯;两个唇形凸起的间距为0.2mm,如果传感器发生过载,两个唇形凸起会贴合在一起,防止应变梁继续变形导致损坏。测量接口共有两个,分别处于应变梁和支撑梁末端的唇形凸起中间,呈V型布局设计,以便测量时测量位置的迅速定位[11]。
4、弹性体受力分析
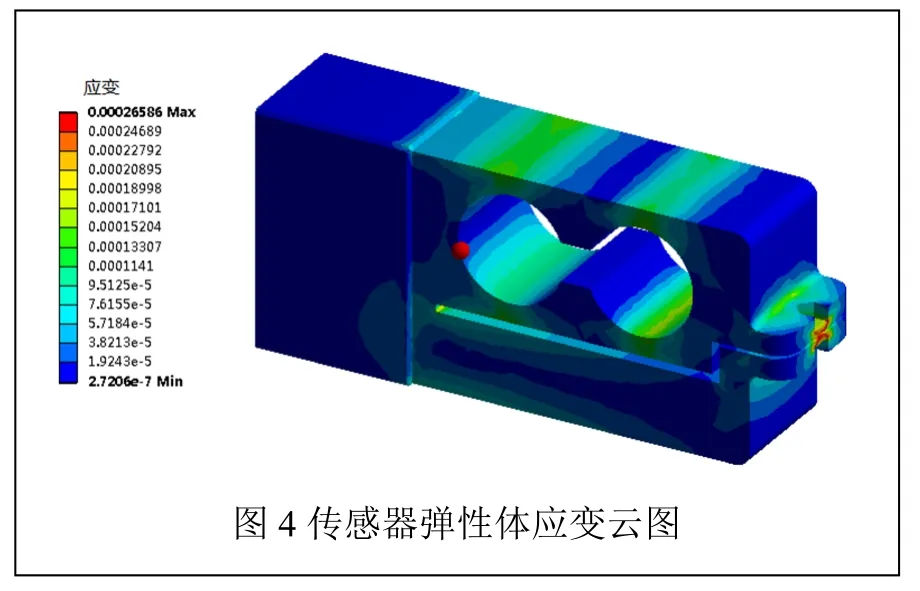
传感器弹性体材料和结构形式及尺寸确定后,对传感器弹性体进行三维建模,通过ANSYS Workbench软件对模型进行有限元分析仿真计算,设置工况为:传感器弹性体后座固定约束,两个测量接口接触面分别施加100N力。
(1)获得传感器弹性体应变云图如图4所示,从云图可以看出传感器弹性体四个应变片粘贴位置的应变值并不一样,通过计算获得平均应变值为186με,满足设计要求。
(2)获得传感器弹性体位移云图如图5所示,从云图可以看出传感器弹性体应变梁测量接口除最大变形为0.0207mm,传感器弹性体应变梁测量接口除最大变形为0.0200mm,在100N力作用下产生的总位移为0.0407mm,小于技术要求0.1mm,满足要求。
5、强度校核
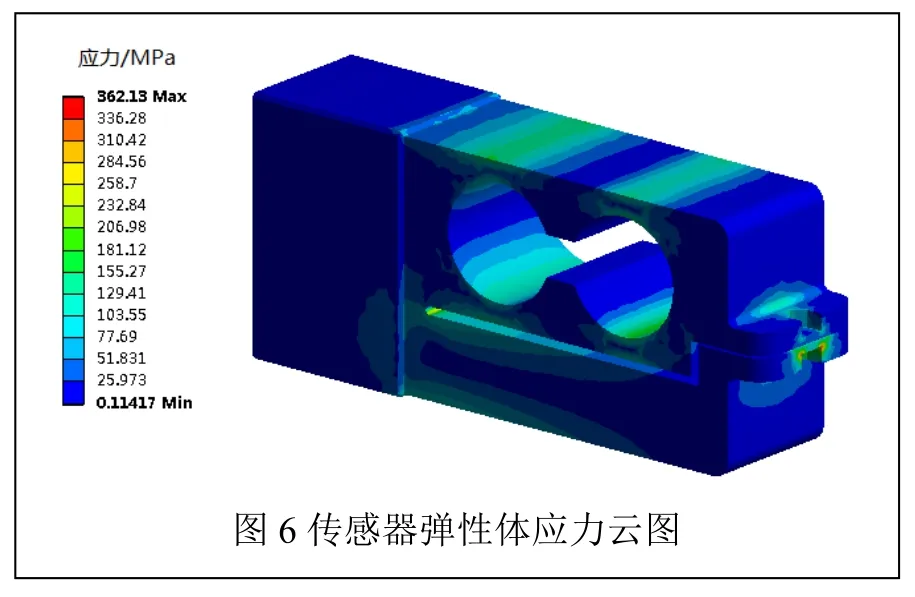
同样通过ANSYS Workbench软件对模型进行有限元分析仿真计算,设置工况为:传感器弹性体后座固定约束,两个测量接口接触面分别施加强制位移0.1mm。获得传感器弹性体应力云图如图6所示,从云图可以看出传感器弹性体产生最大应力值为3.62×108N/m2,远小于屈服极限1.75×109N/m2,满足要求。
四、传感器校准及检验
传感器弹性体加工完成,经过退火处理、应变片粘贴和组桥、灵敏度补偿、温度补偿、零点补偿以及防潮等工艺处理后,对传感器进行校准[12]和检验。

1、传感器校准
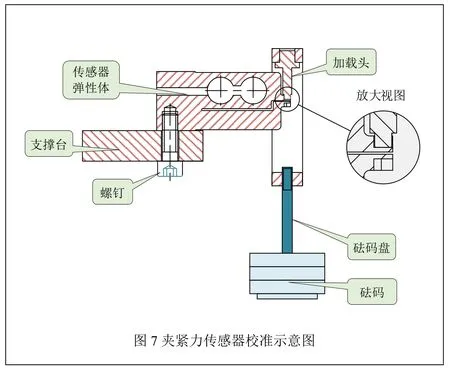
校准方式如图7所示,将完成制作的传感器弹性体通过螺钉固定在支撑台上,在测量接口处通过砝码进行重力加载,其中加载头与测量接头的接触部分的结构形式与被检测机械夹具接触头结构形式相同,使传感器的校准状态的受力状况与使用状态的受力状况相同。
传感器通电后,对传感器弹性体进行三次砝码加载,加载力与传感器信号输出的对应关系图如图8所示,从图中可以看出传感器输出的重复性和线性度良好,通过计算获得传感器精度优于0.2%F.S.[13]。

传感器应变片组桥方式采用惠斯通电桥,已知输出信号ΔU、应变值ε和激励电压U0之间的关系为:

其中,K—应变片灵敏度系数。
经变换可得应变值为:

计算获得实际测量应变值为175με。
2、传感器满量程位移测量
在传感器校准状态下,将砝码加载至满量程100N状态,利用螺旋测微仪对应变梁上测量接口位移进行测量,测量结果为0.019mm;将传感器弹性体倒挂安装,即使支撑梁上测量接口接触面向上,安装砝码盘将砝码加载至满量程100N状态,利用螺旋测微仪对应变梁上测量接口位移进行测量,测量结果为0.019mm。由此获得传感器在100N夹紧力的作用下的总变形为0.038mm,满足要求。
五、结论
与普通应变传感器设计流程不同,夹紧力传感器的设计是以刚度设计为基础的,为了得到较大刚度,在传感器灵敏度上有所让步。事实上,传感器灵敏度并不是传感器的唯一重要参数,传感器在使用过程中,尤其是在航空航天领域的使用中,使用者更关心的是传感器的稳定性,高刚度有利于提高传感器的稳定性。
从校准和检验结果上看,夹紧力传感器应变和位移的理论计算值和实际测量值大体一致,略有差异,这种差异是传感器制作过程中产生的加工误差、贴片位置偏移以及检测的测量手段等多方面引起的,并不影响传感器的使用性能。

夹紧力传感器装配后与配套仪表连接(图9),已使用在某设备机械夹具夹紧力的检测,具有操作简单、稳定性好、测量精度高等优点,夹紧力传感器的研制是成功的。
